
Abstract
This paper develops a micro-scale vibration analysis of micro-plates using higher-order shear and normal deformable plate theory in conjunction with modified couple stress theory. The present model includes one material length scale parameter which takes into account the size effects. The equations of motions and boundary conditions are derived using Hamilton’s principle. Analytical solutions for the free vibration problem of simply supported rectangular micro-plates are obtained. Numerical results are presented to illustrate the effect of small scale on the dynamic response of functionally graded micro-plates. The results show that the size-dependent effect increases the stiffness of the micro-plate and consequently increases the natural frequencies.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
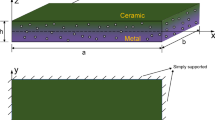
Functionally graded materials (FGMs) are non-homogeneous composites that identify with their smooth and continuous variations in one or more directions. They are usually a combination of two different materials. Most popular FGMs are made of two components: one is metal and the other is ceramic. This combination is in order to achieve a composition with specific characteristics. FGMs have many advantages such as improved stress distribution, high thermal resistance, high toughness and reduced stress intensity factor. Recently, FGMs have found many applications in micro- and nano-scale devices and systems. Some of these applications are thin films (Fu et al. 2003; Lu et al. 2011), atomic force microscopes (AFMs) (Rahaeifard et al. 2009), micro- and nano-electromechanical systems (MEMS and NEMS) (Witvrouw and Mehta 2005; Lee et al. 2006) and so on. As the material size scales reduce to the micron scales, the stiffness and strength of materials increase because of material size effect. It is well known that classical continuum theories do not include the size effect in micro-scale structures. In order to overcome this deficiency, many higher-order theories such as classical couple stress theory with two material length scale parameters (Mindlin and Tiersten 1962; Toupin 1962; Koiter 1964), strain gradient theory with three material length scale parameters (Lam et al. 2003), micro-polar theory (Eringen 1967), non-local elasticity theory (Eringen 1972), surface elasticity (Gurtin et al. 1998) and modified couple stress theory with one material length scale parameter (Yang et al. 2002) have been developed to characterize the size effect in micro-scale structures. Based on the modified couple stress theory, many size-dependent beam and plate models have been developed to consider the size effects in small-scale structures. Park and Gao (2006) developed Euler–Bernoulli beam model for bending analysis of micro-beams. Ma et al. (2008) used Timoshenko beam model for micro-beams. Asghari et al. (2010) considered the Von-Karman nonlinear strains in the Timoshenko beam model. Euler–Bernoulli beam model for buckling analysis of axially loaded micro-beams was utilized by Akgöz and Civalek (2011). Their model was employed by Kong et al. (2008) and Kahrobaiyan et al. (2010) to study the vibration of micro-beams. Ke and Wang (2011) developed a Timoshenko beam model to study the size effect on dynamic stability of functionally graded (FG) micro-beams. Tsiatas (2009) first developed a Kirchhoff plate model (CPT) for static analysis of micro-plates. Yin et al. (2010) and Jomehzadeh et al. (2011) used the model presented by Tsiatas (2009) to study the vibration of micro-plates. This model was used by Akgöz and Civalek (2012) to study the vibration of nano-plates. Asghari and Taati (2013) dealt with classical (Kirchhoff) plate theory (CPT) of FG micro-plates. On the other hand, CPT does not consider shear deformation effect, so it provides accurate results for thin homogeneous plates only and is not suitable for thick plates. Using CPT for moderately thick plates leads to overestimation of results. Ma et al. (2011) and Ke et al. (2012) used the first-order shear deformation theory (FSDT) to develop a size-dependent model for accounting the shear deformation effects. In view of difficulties in determining shear correction factor, FSDT is not a convenient model, whereas it predicts sufficiently accurate results for moderately thick plates. Roque et al. (2013) used modified couple stress theory with meshless method to study the bending of simply supported isotropic micro-plates. Eshraghi et al. (2016) introduced solution methods capable of treating static bending and free vibration problems involving thermally loaded functionally graded annular and circular micro-plates using modified couple stress theory. Thai and Vo (2013) studied the static and dynamic behavior of functionally graded micro-plates. They used modified couple stress theory and sinusoidal shear deformation theory.
Behavior of thick structures in macro- and micro-scales was studied by some researchers (Arbind et al. 2014; Akgöz and Civalek 2015, 2017). Batra and Vidoli (2002) used virtual work principle to determine higher-order shear and normal deformable plate theory for thick plates with linear elastic incompressible anisotropic material. No shear correction factor was used, and vibration analysis of simply supported rectangular plates was investigated. The proposed higher-order shear and normal deformable plate theory is the closest theory to the three-dimensional elasticity solution. According to this theory, Legendre polynomials in thickness direction are used to approximate the displacement field components. Ghayesh et al. (2017) investigated the vibration analysis of geometrically imperfect three-layered shear deformable micro-beams. They considered both hardening and softening nonlinear behavior. Xiao et al. (2008) used meshless local Petrov–Galerkin method with radial basis function to study the static behavior of thick laminated composite elastic plates. They applied higher-order shear and normal deformable plate theory and considered different boundary conditions. Mohseni et al. (2017) studied the bending analysis of micro-plates based on the higher-order shear and normal deformable plate theory. They considered functionally graded distribution of material properties through the thickness.
In this paper, thick plates’ model is developed for free vibration analysis of rectangular FG micro-plates using modified couple stress theory. Variational formulation based on Hamilton’s principle is used in order to obtain the equations of motions and boundary conditions. A solution is determined for FG micro-plates with all edges simply supported (Navier solution). The natural frequencies are obtained for rectangular micro-plates with different material length scale parameters, various thickness ratios, various aspect ratios and some power law indices. The results indicate that the size length scale parameter has a significant effect when the thickness of the micro-plate becomes small.
2 Theoretical Formulation
2.1 Modified Couple Stress Theory
The modified couple stress theory which was proposed by Yang et al. (2002) is a modification of the classical couple stress theory. According to this theory, the virtual strain energy of a linear elastic micro-plate can be expressed as
where σij are the Cartesian components of the stress tensor, ɛij are the components of the strain tensor, mij are the components of deviatoric part of the symmetric couple stress tensor and χij are the components of symmetric curvature tensor, so that
where θi are the components of rotation vector that in terms of displacement components are
Also u1, u2 and u3 are the Cartesian components of displacement field in x1, x2 and x3 direction, respectively.
2.2 Kinematics
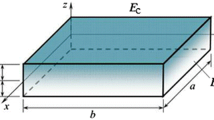
Consider a functionally graded (FG) micro-plate as shown in Fig. 1, where x1x2-plane coincides with the middle surface of the plate and the x3-axis is perpendicular to this plane. As shown in Fig. 1, l1 is the length of the plate along x1 direction, l2 is the width of the plate along x2 direction and h is the thickness of the plate along x3 direction. Using prescribed Cartesian coordinate, the infinitesimal deformations and displacement field of FG micro-plate based on the higher-order shear and normal deformable plate theory (HOSNDPT) are described as (Batra and Vidoli 2002)
where
and a = 0, 1, 2, …, k. Also, La(x3) are the orthonormal Legendre polynomials with the following properties as
where L ′ a (x3) is the first derivative of the orthonormal Legendre polynomial with respect to x3.

Geometry of FG micro-plate
Matrix D shows the matrix of differentiation coefficients. Hence, for k = 7, the general matrix D is defined as follows:
According to Einstein’s notation, repeated indices are summed even if they appear as a subscript and a superscript.
Hence, by considering the linear form of Von-Karman relations for strain–displacement equations, they are simplified as
and also,
2.3 Constitutive Relations
As explained earlier, it is assumed that the micro-plate is made of functionally graded materials where material properties are expressed by the power law function in the thickness direction as
In the above equation, \(\varGamma_{c}\) and \(\varGamma_{m}\) are the values of a typical material property, such as Young’s modulus (E), density (ρ) or Lamè constants (λ, μ) of the ceramic and metal parts, respectively. In addition, N is the power law index denoting the volume fraction of the exponent. Constitutive relations for a linear elastic micro-plate in modified couple stress theory are
where ɛkk is the dilatation strain tensor and δij is Kronecker delta. Also, Lamè constants, μ and λ in terms of engineering constants, are \(\mu = \frac{{E(x_{3} )}}{2(1 + \nu )}\) and \(\lambda = \frac{{E(x_{3} )\nu }}{(1 + \nu )(1 - 2\nu )}\). It must be noted that the Poisson’s ratio (ν) of FG micro-plate is considered to be constant due to its small variation through the thickness of the micro-plate. In Eq. (13), l is called the material length scale parameter which is regarded as a material property measuring the effect of couple stress. This parameter can be determined from torsion test of slim cylinder (Chong et al. 2001) or bending test of thin beams (Lam et al. 2003).
2.4 Equations of Motion
Hamilton’s principle is used herein to derive the equations of motion and boundary conditions (Reddy 2002). Hence,
where U is the strain energy, W is the work done by external forces, K is the kinetic energy and T denotes time.
Using the variational approach, variation of strain energy δU is given by
so that
Consider the following force and moment resultants:
Substituting relations (17) in Eq. (16) and simplifying the results leads to
Also, variation of the work done by external forces can be obtained as (Reddy and Kim 2012)
In Eq. (19), \(\bar{f}_{i} ,\,\,\bar{c}_{i} ,\,\,q_{i}^{{}}\) and \(\bar{t}_{i} \,(i = 1,2,3)\) are body forces (per unit volume), body couples (per unit volume), distributed transverse loads on the plate surfaces (superscripts t and b indicate top and bottom) and surface forces, respectively. Also V, Ω and S denote the volume, surface and lateral surface of the micro-plate, respectively. Replacing Eqs. (9) in Eq. (19) leads to the following relation:
so that
It should be noted that variation of work done by the external forces is simplified using Reddy’s definitions (Reddy and Kim 2012) as
Also, variation of kinetic energy is expressed as
Replacing Eqs. (9) in Eq. (23) and simplifying the relations results in
Let
Therefore, Eq. (24) is simplified as
By substituting Eqs. (18), (21) and (26) into Eq. (14) and integrating by parts, the following equations of motion for FG micro-plates based on the HOSNDPT and modified couple stress theory are determined:
For an FG micro-plate without body forces, body couples and surface tractions, equations of motion are reduced to
Using the variational approach and Hamilton’s principle, boundary conditions are derived besides the equations of motion. Hence, they are
where \(({\mathbf{n}}_{1} ,{\mathbf{n}}_{2} ,{\mathbf{n}}_{3} )\) are unit outward normal vectors in (x1, x2, x3) directions, respectively.
Clearly, when the size effects are neglected, i.e., l = 0, the present model is reduced to the relations for FG plate shown by Sheikholeslami and Saidi (2013).
Further, considering harmonic motion, the solutions of Eqs. (28) are assumed as
where \(i = \sqrt { - 1}\) and ω is the frequency of motion.
Replacing Eqs. (30) in Eqs. (28), system homogenous equations are determined where the Eigen values are the natural frequency.
2.5 Analytical Solutions
In this section, an analytical solution for free vibration of simply supported rectangular micro-plates is presented. Based on the Navier approach, the displacement components are approximated using double series solution as
where m and n are integers that show the mode numbers and \((\tilde{V}_{1}^{amn} ,\tilde{V}_{2}^{amn} ,\tilde{W}^{amn} )\) are coefficients of the components of the displacement field.
According to the Navier solution, the components of the displacement field are extended using double trigonometric series so that the boundary conditions of the plate (Eqs. 29) are satisfied.
Using Eqs. (31), a homogenous system of equations is obtained. Solving the resulted characteristic equation leads to determining the natural frequencies.
3 Numerical Results and Discussions
In order to validate the results, a comparison is made with the available results in the literature. Hence, consider a simply supported micro-plate made of epoxy with the following properties (Reddy 2011):
In Tables 1 and 2, dimensionless natural frequency \(\bar{\omega } = \omega \frac{{l_{1}^{2} }}{h}\sqrt {\frac{\rho }{E}}\) of simply supported homogeneous square micro-plate is compared with the shown natural frequencies by Yin et al. (2010) (based on classical plate theory (CPT)) and by Thai and Kim (2013) (based on third-order shear deformable plate theory (TSDT)), respectively. Also, in Table 3 the non-dimensional natural frequencies \(\tilde{\omega } = \omega h\sqrt {\frac{{\rho_{c} }}{{E_{c} }}}\) obtained from HOSNDPT and the results based on the TSDT (Thai and Kim 2013) are compared, while the order of Legendre polynomial is 5. According to these tables, it is clear that there is a good agreement between the presented results and those shown in the literature.
In order to have a numerical study, it is assumed that FG micro-plate is made of alumina and aluminum with the following material properties (Salamat-Talab et al. 2012):
Also, the material length scale parameter is 17.6 × 10−6 m (Lam et al. 2003). In Table 4, the convergence of results versus different orders of Legendre polynomial is tabulated. Based on the table, it is clear that for thin micro-plates results converge for small values of k, but for thick micro-plates, they converge for bigger values of k; thus, in the following, fifth-order theory of HOSNDPT is used.
In Tables 5, 6 and 7, non-dimensional natural frequencies are presented where variations of different parameters are considered. Based on the tables, it is clear that considering material length scale parameter leads to increasing the stiffness of micro-plate; therefore, dimensionless natural frequencies increase as the material length scale parameter increases. Also, it is inferred that increasing the power law index, N, leads to decreasing the dimensionless natural frequencies. According to the tables, aspect ratio of the micro-plate, l1/l2, affects the responses. As shown in Table 7, the natural frequency is influenced by the side-to-thickness ratio (l1/h).
Figure 2 shows the effect of the material length scale parameter l on dimensionless natural frequency \(\bar{\omega }\) of a square micro-plate. According to this figure, increasing the material length scale parameter increases the dimensionless natural frequency. Also, as the length of micro-plate increases, the dimensionless natural frequency increases. According to this figure, variation of results is more apparent for plates with thickness near to the material length scale parameter.

Effect of the material length scale parameter l on dimensionless natural frequency \(\bar{\omega }\) for a square micro-plate
The effect of material properties on dimensionless natural frequency \(\bar{\omega }\) of a square FG micro-plate is depicted in Fig. 3. Based on the figure, increasing the power law index reduces the dimensionless natural frequency of FG micro-plate. Also, changes in dimensionless natural frequencies are more considerable for micro-plates with thickness/material length scale ratio less than 3.

Effect of the material properties on the dimensionless natural frequency \(\bar{\omega }\) of a square FG micro-plate
Figure 4 shows the effect of the length-to-thickness ratio on dimensionless natural frequency \(\bar{\omega }\) of a square micro-plate. According to this figure, variation of natural frequencies is more apparent for smaller values of length-to-thickness ratio.

Effect of the thickness ratio l1/h on the dimensionless natural frequency \(\bar{\omega }\) of a square micro-plate
4 Conclusions
In the present paper, free vibration analysis of thick functionally graded micro-plates was investigated. Higher-order shear and normal deformable plate theory in conjunction with modified couple stress theory with one length scale parameter was used. Comparing the results with the available results in the literature shows that the presented model and solution have good agreement with the other results. An analytical solution for free vibration of simply supported FG micro-plate was presented. According to the numerical results, it is inferred that the inclusion of micro-structures affects the micro-plate behavior so that the equivalent flexural rigidity increases. Thus, modeling micro-plates with classical plate theories leads to inaccurate results. Also, it is seen that increasing the material length scale parameter increases the non-dimensional natural frequencies. In addition, increasing the power law index reduces the dimensionless natural frequencies. Numerical study indicates that while the thickness of micro-plate is the same as the material length scale parameter, variation of result is more apparent. This change in results vanishes as the ratio of thickness to material length scale parameter increases. As depicted in figures, increasing the aspect ratio increases the dimensionless natural frequencies.
References
Akgöz B, Civalek Ö (2011) Strain gradient elasticity and modified couple stress models for buckling analysis of axially loaded micro-scaled beams. Int J Eng Sci 49:1268–1280
Akgöz B, Civalek Ö (2012) Free vibration analysis for single-layered graphene sheets in an elastic matrix via modified couple stress theory. Mater Des 42:164–171
Akgöz B, Civalek Ö (2015) A microstructure-dependent sinusoidal plate model based on the strain gradient elasticity theory. Acta Mech 226:2277–2294
Akgöz B, Civalek Ö (2017) Effects of thermal and shear deformation on vibration response of functionally graded thick composite microbeams. Compos B Eng 129:77–87
Arbind A, Reddy JN, Srinivasa AR (2014) Modified couple stress-based third-order theory for nonlinear analysis of functionally graded beams. Latin Am J Solids Struct 11:459–487
Asghari M, Taati E (2013) A size-dependent model for functionally graded micro-plates for mechanical analyses. J Vib Control 19:1614–1632
Asghari M, Kahrobaiyan MH, Ahmadian MT (2010) A nonlinear Timoshenko beam formulation based on the modified couple stress theory. Int J Eng Sci 48:1749–1761
Batra RC, Vidoli S (2002) Higher order piezoelectric plate theory derived from a three-dimensional variational principle. AIAA J 40:91–104
Chong ACM, Yang F, Lam DCC, Tong P (2001) Torsion and bending of micron-scaled structures. J Mater Res 16:1052–1058
Eringen AC (1967) Theory of micropolar plates. Z Angew Math Phys 18:12–30
Eringen AC (1972) Nonlocal polar elastic continua. Int J Eng Sci 10:1–16
Eshraghi I, Dag S, Soltani N (2016) Bending and free vibrations of functionally graded annular and circular micro-plates under thermal loading. Compos Struct 137:196–207
Fu Y, Du H, Zhang S (2003) Functionally graded TiN/TiNi shape memory alloy films. Mater Lett 57:2995–2999
Ghayesh MH, Farokhi H, Gholipour A (2017) Vibration analysis of geometrically imperfect three-layered shear-deformable microbeams. Int J Mech Sci 122:370–383
Gurtin ME, Weissmuller J, Larche F (1998) A general theory of curved deformable interfaces in solids at equilibrium. Philos Mag A 78:1093–1109
Jomehzadeh E, Noori HR, Saidi AR (2011) The size-dependent vibration analysis of micro plates based on a modified couple stress theory. Physica E 43:877–883
Kahrobaiyan MH, Asghari M, Rahaeifard M, Ahmadian MT (2010) Investigation of the size-dependent dynamic characteristics of atomic force microscope micro-cantilevers based on the modified couple stress theory. Int J Eng Sci 48:1985–1994
Ke LL, Wang YS (2011) Size effect on dynamic stability of functionally graded micro-beams based on a modified couple stress theory. Compos Struct 93:342–350
Ke LL, Wang YS, Yang J, Kitipornchai S (2012) Free vibration of size-dependent Mindlin microplates based on the modified couple stress theory. J Sound Vib 331:94–106
Koiter WT (1964) Couple stresses in the theory of elasticity, I and II. Nederl Akad Wetensch Proc Ser B 67:17–29
Kong S, Zhou S, Nie Z, Wang K (2008) The size-dependent natural frequency of Bernoulli–Euler micro-beams. Int J Eng Sci 46:427–437
Lam DCC, Yang F, Chong ACM, Wang J, Tong P (2003) Experiments and theory in strain gradient elasticity. J Mech Phys Solids 51:1477–1508
Lee Z, Ophus C, Fischer L, Nelson-Fitzpatrick N, Westra KL, Evoy S et al (2006) Metallic NEMS components fabricated from nano-composite Al–Mo films. Nanotechnology 17:3063–3070
Lu C, Wu D, Chen W (2011) Non-linear responses of nano-scale FGM films including the effects of surface energies. IEEE Trans Nanotechnol 10(6):1321–1327
Ma HM, Gao XL, Reddy JN (2008) A microstructure-dependent Timoshenko beam model based on a modified couple stress theory. J Mech Phys Solids 56:3379–3391
Ma HM, Gao XL, Reddy JN (2011) A non-classical Mindlin plate model based on a modified couple stress theory. Acta Mech 220:217–235
Mindlin RD, Tiersten HF (1962) Effects of couple-stresses in linear elasticity. Arch Ration Mech Anal 11:415–448
Mohseni E, Saidi AR, Mohammadi M (2017) Bending-stretching analysis of thick functionally graded micro-plates using higher-order shear and normal deformable plate theory. Mech Adv Mater Struct 24:1221–1230
Park SK, Gao X-L (2006) Bernoulli–Euler beam model based on a modified couple stress theory. J Micromech Microeng 16:2355–2359
Rahaeifard M, Kahrobaiyan MH, Ahmadian MT (2009) Sensitivity analysis of atomic force microscope cantilever made of functionally graded materials. In: 3rd International conference on micro- and nano-systems. ASME power transmission and gearing conference, pp 539–544
Reddy JN (2002) Energy principles and variational methods in applied mechanics. Wiley, New York
Reddy JN (2011) Microstructure-dependent couple stress theories of functionally graded beams. J Mech Phys Solids 59:2382–2399
Reddy JN, Kim J (2012) A nonlinear modified couple stress-based third-order theory of functionally graded plates. Compos Struct 94:1128–1143
Roque CMC, Ferreira AJM, Reddy JN (2013) Analysis of Mindlin micro plates with a modified couple stress theory and a meshless method. Appl Math Model 37:4626–4633
Salamat-Talab M, Nateghi A, Torabi J (2012) Static and dynamic analysis of third-order shear deformation FG micro beam based on modified couple stress theory. Int J Mech Sci 57:63–73
Sheikholeslami SA, Saidi AR (2013) Vibration analysis of functionally graded rectangular plates resting on elastic foundation using higher-order shear and normal deformable plate theory. Compos Struct 106:350–361
Thai HT, Kim SE (2013) A size dependent functionally graded Reddy plate model based on a modified couple stress theory. Compos Part B Eng 45:1636–1645
Thai HT, Vo T (2013) A size-dependent functionally graded sinusoidal plate model based on a modified couple stress theory. Compos Struct 96:376–383
Toupin RA (1962) Elastic materials with couple-stresses. Arch Ration Mech Anal 11:385–414
Tsiatas GC (2009) A new Kirchhoff plate model based on a modified couple stress theory. Int J Solids Struct 46:2757–2764
Witvrouw A, Mehta A (2005) The use of functionally graded poly-SiGe layers for MEMS applications. Mater Sci Forum 492–493:255–260
Xiao JR, Gilhooley DF, Batra RC, Gillespie JW Jr, McCarthy MA (2008) Analysis of thick composite laminates using a higher-order shear and normal deformable plate theory (HOSNDPT) and a meshless method. Compos Part B 39:414–427
Yang F, Chong ACM, Lam DCC, Tong P (2002) Couple stress based strain gradient theory for elasticity. Int J Solids Struct 39:2731–2743
Yin L, Qian Q, Wang L, Xia W (2010) Vibration analysis of microscale plates based on modified couple stress theory. Acta Mech Solida Sin 23:386–393
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mohseni, E., Saidi, A.R. & Mohammadi, M. Vibration Analysis of Thick Functionally Graded Micro-plates Using HOSNDPT and Modified Couple Stress Theory. Iran J Sci Technol Trans Mech Eng 43 (Suppl 1), 641–651 (2019). https://doi.org/10.1007/s40997-018-0185-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40997-018-0185-6