
Abstract
A variational approach is developed to obtain bending, buckling and vibration finite element equations of nonlocal Timoshenko beams in this study. The reason for using the finite element method in this research is to investigate the behavior of nano-beams with complex geometry, material property and different boundary conditions. Weak forms of governing equations are derived, and the nonlocal differential elasticity theory is used to find the finite element formulation of nonlocal Timoshenko beams. In deriving the weak formulations, it is seen that it is impossible to construct the quadratic functional form due to non-symmetric bilinear property. Using the developed concepts and formulations, the bending and buckling of nonlocal Timoshenko beams with four classical boundary conditions are analyzed and the obtained results are compared with those reported in the literature. In order to show the capabilities of the proposed formulation in comparison with exact methods, the simply supported stepped nonlocal Timoshenko beam is selected and bending and buckling analyses are performed as well.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nano-beams and nano-plates have become one of the most important structures used widely in NEMS devices due to outstanding mechanical and physical properties. There are many research works about using such structures that can be referred to the works done by Wang et al. (2006, 2008), Ghannadpour and Mohammadi (2010, 2011), Ghannadpour et al. (2013), Wang and Wang (2007), Dinckal (2016) and Ebrahimi and Barati (2016). In the literature, it is observed from both experimental and theoretical simulation that the size effect has an important role on static and dynamic deformation behavior of materials and cannot be negligible in nano-sized structures (Farrokhabadi and Tavakolian 2017, Tavakolian and Farrokhabadi 2017 and Tavakolian et al. 2017). Therefore, by applying the size-independent theories, inaccurate results will be obtained.
Due to the difficulties in experimental work at the nanoscale and due to their being time-consuming, numerical simulations of nano-structures have been presented extensively by the researchers and they became interested to develop the size-dependent continuum theories. Therefore, to model the small-sized structures, the various continuum theories that are dependent on size have attracted a lot of attention. They can be pointed out to micro-morphic theory by Eringen and Suhubi (1964), micro-polar theory by Eringen and Suhubi (1964) and Chen et al. (2004), couple stress theory by Toupin (1962) and nonlocal elasticity theory by Eringen (1983).
Micro-morphic theory models a material as a continuous set of deformable point particles. The deformation of a micro-morphic continuum includes the displacements of the center of particles and the microscopic internal motion within the microstructure of a particle. By considering the particle as rigid, micro-morphic theory becomes micro-polar theory. Therefore, micro-polar theory yields only translational and rotational modes of rigid units. In the simplest form of micro-polar theory, the so-called couple stress theory, the rotation vector is dependent on the displacement vector. This theory, which is elaborated by Toupin (1962) and Koiter (1964), in addition to the classical constants, contains two material length scale coefficients for an isotropic elastic material. Recently, a modified couple stress theory was proposed and introduced by Yang et al. (2002) which contains one additional material length scale coefficient.
The history of nonlocal elasticity theory goes back to the works introduced by Eringen (1972, 1983). This theory expresses that the stress at any point in the body depends on the strain at this point and also on strains at all points in the body. The nonlocal effect is present due to the introduction of a nonlocal nanoscale which depends on the material and an internal characteristic length, and this parameter takes the zero value at macroscale.
Among the above-mentioned theories, the theory of nonlocal elasticity has been adopted by many researchers, as can be seen in the literature. This theory is used in two general versions, nonlocal differential and integral elasticity (Hu et al. 2008), but the former is more popular due to its simplicity. Many scientists have used the differential type of nonlocal elasticity for static and dynamic analyses of nano-sized structures.
The study of Peddieson et al. (2003) can be considered to be a pioneering work which first applied the nonlocal elasticity theory of Eringen. In this work, a nonlocal Euler beam was selected and its flexural behavior was studied using nonlocal differential elasticity. For integral type of nonlocal elasticity, Polizzotto (2001) developed the total potential energy, the complementary energy and the mixed Hu–Washizu principles.
It is worth noting that most of the scientific community’s attention in the literature has been attracted to deriving the governing equations and the corresponding boundary conditions of nano-structures by the well-known technique of the calculus of variation and with nonlocal differential elasticity approach. Accordingly, the exact solution of most analyses on nano-beams with simple domains and classical boundary conditions can be found in the literature such as works carried out by Wang et al. (2006, 2007), Challamel and Wang (2008) and Wang (2005). For example, Wang et al. (2006) have analyzed the elastic buckling behavior of micro- and nanotubes based on differential type of nonlocal elasticity and the Timoshenko beam theory. The governing equations and the corresponding boundary conditions have been developed by the principle of virtual work. Such exact solutions are not generally available for nano-sized structures with complicated geometries. It is quite obvious that the finite element method can efficiently analyze the structures with arbitrary boundary conditions and also complicated geometries. So this has made this technique an efficient alternative to the previous solutions for nano-sized beams depending on beam model. Use of the finite element method in the framework of nonlocal integral elasticity has been formulated for the first time by Pisano et al. (2009a, b). A new research activity on nonlocal structures with differential type of nonlocal elasticity theory and with Galerkin finite element method is the research carried out by Phadikar and Pradhan (2010). In their study, the Galerkin finite element technique in conjunction with differential type of nonlocal elasticity using both Euler beam theory and classical plate theory has been presented. More recently, Ghannadpour et al. (2013) analyzed the bending, buckling and vibration behaviors of nonlocal Euler beams. Weak form of the governing equation of nonlocal beams was outlined in their work.
With the above descriptions, finite element equations and weak formulations related to the bending, buckling and vibration of Timoshenko beams in the framework of nonlocal differential elasticity approach are presented in this paper. Thus, the first aim of this study is to present the final expressions for the weak form of the weighted residuals based on the differential type of nonlocal elasticity. The second aim is to drive the element matrices of nonlocal Timoshenko beams and analyze the bending and buckling behaviors of such beams.
2 Derivation of Governing Equations
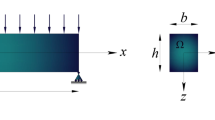
In this section, for completeness of formulations, bending, buckling and vibration governing equations for nonlocal Timoshenko beams are derived. It is known that in a shear deformation beam theory, the so-called Timoshenko beam theory (TBT), transverse shear stress and strain are invariant throughout the thickness of the beam. This is due to ignoring the normality assumption in Euler beam theory. Therefore, in Timoshenko beam theory, plane sections remain plane after deformation but not necessarily normal to the longitudinal axis.
By adopting that the x- and z-axes are assumed along the length and thickness of the beam, respectively, the relations between strains and displacements according to the Timoshenko beam theory can be written as
where z is measured from the mid-plane of the beam, ϕ the rotation due to bending, w the transverse displacement, ɛxx the normal strain and γxz the transverse shear strain.
The virtual strain energy δU, the virtual potential energy δV of axial load P and transverse distributed load \(q = q(x)\) and the virtual kinetic energy δT of a Timoshenko beam by assuming free harmonic motion and including the effect of rotary inertia can be written as follows:
In the above equations, σxx is the normal stress, σxz the transverse shear stress, L the length of the beam, A the cross-sectional area of the beam, I the second moment of area, ω the circular frequency of vibration and ρ the mass density of the beam material.
By substituting Eqs. (1) and (2) into Eq. (3), the final form of the virtual strain energy by considering the shear correction factor Ks can be expressed as Eq. (6).
where \(M = \int_{A} {\sigma_{xx} z{\text{d}}A}\) and \(Q = K_{s} \int_{A} {\sigma_{xz} {\text{d}}A}\) are the bending moment and shear force, respectively. The Hamilton principle for the Timoshenko beam theory has the following form:
The Euler differential equations can be derived using the well-known technique of variational calculus. After applying this technique, the following relations are obtained which are known as bending, buckling and vibration governing equations of Timoshenko beams.
The associated boundary conditions of the beam are also obtained as
As can be observed, the above equations are the same as the governing equations for local Timoshenko beam theory. As mentioned before, in this study the nonlocal differential elasticity theory is used. The essence of nonlocal theory is that the size effects are captured by considering that the stress at a point in a body is a function of strains at all other points. Therefore, due to the nonlocal constitutive relations, the shear force and bending moment expressions for the nonlocal beams are quite different. The constitutive equations in nonlocal elasticity and in one-dimensional problems can be written as (Eringen 1964 and 1983):
where E is the Young’s modulus, G the shear modulus and \(\eta\) the scale factor incorporating the size effect. The nonlocal effect in this theory is present due to the introduction of a nonlocal scale factor \(\eta=e_{0}a\) which depends on the material e0 and an internal characteristic length a (e.g., granular distance and C–C bond length), and at macroscale, this parameter takes the zero value. More details on how to find this parameter can be found in the work studied by Wang et al. (2007).
As it can be seen in Eqs. (12) and (13), in the nonlocal differential elasticity the constitutive relation is presented in the differential equations form and also the constitutive relation for the shear stress and strain was assumed the same as in the local beam theory in this study. Multiplying Eq. (12) by \(z {\text{d}}A\) and integrating the result over the area A yields
By multiplying Eq. (13) by shear correction factor Ks and integrating over the area A and also substituting Eqs. (8) and (9) into Eq. (14), the shear force and bending moment expressions for the nonlocal beam theory can be written in the following forms:
Finally, the governing equations of the nonlocal Timoshenko beam in terms of the displacement components w and ϕ can be obtained by substituting Eqs. (15) and (16) into Eqs. (8) and (9).
It is noted that by setting \(\eta=0\) in the above equations, the governing equations of the local Timoshenko beam can be retrieved.
3 Derivation of Weak Form
In this section, derivation of weak form of the obtained governing equations of the nonlocal Timoshenko beams is outlined. As it is known, the weak form for a differential equation can be obtained based on the weighted-integral form that is equivalent to the governing differential equation as well as the associated natural boundary conditions.
Based on the above descriptions, the weak form of the governing Eqs. (17) and (18) is developed using the inverse of variational calculus, i.e., each equation must be multiplied by a weight function. To do this, Eq. (17) is multiplied by a weight function − ψ1 and Eq. (18) by a weight function − ψ2, and then, they are integrated over the beam length.
After performing integration once by parts on the first two terms of Eq. (19) and on the first four terms of Eq. (20), and using Eqs. (10), (11), (15) and (16), the weak statements can be written in the following final form.
The coefficients of the weight functions in the boundary integrals are called secondary variables, and their specifications constitute the natural boundary conditions. The weight functions ψ1 and ψ2 must have the physical interpretations that give ψ1V and ψ2M units of work. Clearly, ψ1 must be equivalent to (the variation of) the transverse deflection w, and ψ2 must be equivalent to (the variation of) the rotation function ϕ.
In the above equations, it can be observed that all the terms are either bilinear or linear. However, the first and the third terms in Eq. (22) are non-symmetric bilinear. Therefore, it is impossible to construct the associated quadratic functional form.
It must be remembered that, as in the case of variational and weighted-residual methods, the aim is to satisfy the governing differential equations in a weighted-integral sense. The type of finite element model depends on the weighted-integral form used to generate the algebraic equations. Thus, if one uses the weak form, the resulting model will be different from those obtained with a weighted-residual statement in which the weight function can be any of several choices. In the remaining of the paper, the weak form finite element models are concerned.
4 Weak Form Finite Element Formulation
To construct the finite element model, the global domain (0, L) of the problem should be divided into a set of sub-domains. Each isolated interval, which is called finite element, is of length l with domain \((x_{e},x_{e+1})\). Therefore, the weak form must be applied to one of the isolated elements.
A close examination of the terms in Eqs. (23) and (24) shows that the transverse deflection w is differentiated twice with respect to x and the rotation function ϕ is differentiated only once. In the present work, the following displacement fields in a local coordinate system \(\bar{x}\) have been defined for w and ϕ.
where \(N_{j} \left( {\bar{x}} \right),\;j = 1, 2, 3,4\) are Lagrange interpolation functions which are given as follows:
and wj and \(\phi_{j},\, j = 1, 2, 3, 4\) denote the nodal degrees of freedom of the element. By substituting the displacement fields into the weak form Eqs. (23) and (24) and assuming \(q = q_{0}\) (constant), the following finite element equations are obtained.
where
and the eigenvalue \(\beta = P/\bar{P}\) represents the ratio of actual buckling load and applied in-plane load. Equations (27) and (28) can be written in matrix form as
or
where \(\left\{ U \right\}, \left[ K \right], \left[ B \right], \left[ M \right], \left\{ Q \right\} \text{ and } \left\{ F \right\}\) are defined in “Appendix”.
It is emphasized that the corresponding equations of the local Timoshenko beam element can be achieved by setting \(\left[ {B^{21} } \right] = \left[ {M^{21} } \right] = \left[ {M^{{{\prime }22}} } \right] = 0\) in Eq. (30). The submatrices \(\left[ {B^{21} } \right]\) and \(\left[ {M^{21} } \right]\) have non-symmetric effect on the finite element equations of the nonlocal Timoshenko beam element.
Finally, by applying these expressions to obtain the matrices of individual elements, the overall matrices for the whole beam can be assembled by using the conventional routines of finite element method.
5 Results and Discussions
In the above sections, the finite element formulations for bending, buckling and vibration of nonlocal Timoshenko beams were presented. However, the results for bending and buckling of nonlocal Timoshenko beams are obtained and presented in this section. In order to conduct convergence study and also validation of the results, the following data are adopted in generating the bending and buckling results.
Nano-rod with diameter \(d = 1\;{\text{nm}}\), Young’s modulus \(E = 1 {\text{ TPa}}\), Poisson’s ratio \(v = 0.19\), shear correction factor \(K_{s} = 0.9\), applied in-plane load \(\bar{P} = 1 {\text{ nN}}\) and uniform distributed load \(q_{0} = 1 {\text{ nN}}/{\text{nm}}\).
The convergence studies carried out for the maximum deflection w and critical buckling load Pcr of a simply supported nano-rod with the scale coefficient \(\eta\) of 1 and length-to-diameter ratio L/d of 10 are tabulated in Table 1.
In this table, the results of maximum deflection and critical buckling load obtained by Wang et al. (2006 and 2008) are also included. In the mentioned references, the governing equations and the boundary conditions have been derived using the principle of virtual work and explicit expressions for the transverse deflections and critical buckling loads of nano-beams with various end conditions have been presented.
The convergence study shows that over 20 elements are needed to obtain accurate results for the critical buckling load Pcr. But the data related to the bending analysis converge with fewer numbers of elements. However, for the sake of confidence, all of the results presented in this study have been calculated using 30 elements.
In the next step and in order to compare the results obtained by the proposed FEM, the maximum deflections w and critical buckling loads Pcr are tabulated and compared with those of obtained by Wang et al. (2006 and 2008) in Tables 2 and 3, respectively. As mentioned before, the results of Wang were obtained by solving the governing equations and so they are named exact solutions.
It can be seen that there is an excellent agreement between the FEM results and exact solutions.
Table 2 shows that for a simply supported nonlocal Timoshenko beam subjected to a uniformly distributed load, the deflection is affected by the small-scale coefficient, whereas in the clamped nonlocal Timoshenko beam example, the deflection is the same as that of local Timoshenko beam. In other words, in the clamped nonlocal Timoshenko beam, the deflection is not affected by the scaling factor (Challamel and Wang 2008).
It can be inferred from Table 3 that the application of the local elasticity models for nano-sized structures analysis would lead to an overprediction of the buckling loads if the effect of small scale is neglected between the atoms.
In order to show the ability of the finite element method, the simply supported stepped nonlocal Timoshenko beam shown in Fig. 1 has been chosen and bending and buckling analyses have been performed.

Simply supported stepped nonlocal Timoshenko beam
The following data are adopted in generating the results of stepped beam with circular cross section.
Nano-rod with diameters \(d_{1} = 4 {\text{ nm}}\), \(d_{2} = 3 {\text{ nm}}\), \(d_{3} = 2 {\text{ nm}}\), lengths \(l_{1} = l_{2} = l_{3} = 10 {\text{ nm}}\), Young’s modulus \(E = 1 {\text{ TPa}}\), Poisson’s ratio v = 0.19, shear correction factor Ks = 0.9, applied in-plane load \(\bar{P} = 1 {\text{ nN}}\) and uniform distributed load \(q_{0} = 1 {\text{ nN}}/{\text{nm}}\).
All the analyses for this beam have been obtained by choosing 45 finite elements of equal length. The maximum deflections for various nonlocal parameters and also critical buckling loads are tabulated in Table 4.
As can be seen from the above table, the deflections and the critical buckling loads of the stepped nonlocal Timoshenko beam are affected by the scale coefficient. This table demonstrates the significant effects of the scale coefficient on higher modes of buckling. This can also be seen from the buckling deflection modes represented in Fig. 2.

a First mode shape of simply supported stepped nonlocal Timoshenko beam, b second mode shape of simply supported stepped nonlocal Timoshenko beam, c third mode shape of simply supported stepped nonlocal Timoshenko beam
6 Conclusion
In this paper, nonlocal Timoshenko beam element matrices in bending, buckling and vibration formulations were derived. The final expressions for the weak form of the weighted residuals using the differential type of nonlocal elasticity were also derived. In the development process, it was found that there are two terms in the weak statements of the governing equations which have non-symmetric bilinear form. Therefore, it was concluded that it is impossible to construct the quadratic functional form. In this regard and after deriving the finite element formulation, some nano-beams with four classical boundary conditions were analyzed in bending and buckling problems. It was observed that the results of the developed method are in excellent agreement with exact solutions. Also, in order to show the capabilities of the FEM method in comparison with exact methods, the simply supported stepped nonlocal Timoshenko beam was selected and bending and buckling analyses were performed. The present study will be helpful in the analyses and design of nano-sized structures with complicated geometry, material property and boundary conditions.
References
Challamel N, Wang CM (2008) The small length scale effect for a non-local cantilever beam: a paradox solved. Nanotechnology 19:345703
Chen Y, Lee JD, Eskandarian A (2004) Atomistic viewpoint of the applicability of micro-continuum theories. Int J Solids Struct 41:2085
Dinckal C (2016) Free vibration analysis of carbon nanotubes by using finite element method. Iran J Sci Technol Trans Mech Eng 40(1):43–55
Ebrahimi F, Barati MR (2016) Nonlocal thermal buckling analysis of embedded magneto-electro-thermo-elastic nonhomogeneous nanoplates. Iran J Sci Technol Trans Mech Eng 40(4):243–264
Eringen AC (1972) On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. Int J Eng Sci 10:1–16
Eringen AC (1983) On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J Appl Phys 54:4703–4710
Eringen AC, Suhubi ES (1964) Nonlinear theory of simple micro-elastic solids-I. Int J Eng Sci 2:189–203
Farrokhabadi A, Tavakolian F (2017) Size-dependent dynamic analysis of rectangular nanoplates in the presence of electrostatic, Casimir and thermal forces. Appl Math Model 50:604–620
Ghannadpour SAM, Mohammadi B (2010) Buckling analysis of micro- and nano-rods/tubes based on nonlocal Timoshenko beam theory using Chebyshev polynomials. Adv Mater Res 123–125:619–622
Ghannadpour SAM, Mohammadi B (2011) Vibration of nonlocal euler beams using Chebyshev polynomials. Key Eng Mater 471:1016–1021
Ghannadpour SAM, Mohammadi B, Fazilati J (2013) Bending, buckling and vibration problems of nonlocal Euler beams using Ritz method. Compos Struct 96:584–589
Hu Y, Liew KM, Wang Q, He XQ, Yakobson BI (2008) Nonlocal shell model for flexural wave propagation in double-walled carbon nanotubes. J Mech Phys Solids 56:3475
Koiter WT (1964) Couple-stresses in the theory of elasticity. In: Proceedings of the Koninkliske Ned- erlandse Akademie van Wetenschappen (B), vol 67, pp 17–44
Peddieson J, Buchanan GR, McNitt RP (2003) Application of nonlocal continuum models to nanotechnology. Int J Eng Sci 41:305–312
Phadikar JK, Pradhan SC (2010) Variational formulation and finite element analysis for nonlocal elastic nanobeams and nanoplates. Comput Mater Sci 49:492–499
Pisano AA, Sofi A, Fuschi P (2009a) Nonlocal integral elasticity: 2D finite element based solutions. Int J Solids Struct 46:3836–3849
Pisano AA, Sofi A, Fuschi P (2009b) Finite element solutions for nonhomogeneous nonlocal elastic problems. Mech Res Commun 36:755–761
Polizzotto C (2001) Nonlocal elasticity and related variational principles. Int J Solids Struct 38:7359–7380
Tavakolian F, Farrokhabadi A (2017) Size-dependent dynamic instability of double-clamped nanobeams under dispersion forces in the presence of thermal stress effects. Microsyst Technol 23(8):3685–3699
Tavakolian F, Farrokhabadi A, Mirzaei M (2017) Pull-in instability of double clamped microbeams under dispersion forces in the presence of thermal and residual stress effects using nonlocal elasticity theory. Microsyst Technol 23(4):839–848
Toupin RA (1962) Elastic materials with couple-stresses. Arch Ration Mech Anal 11:385–414
Wang Q (2005) Wave propagation in carbon nanotubes via nonlocal continuum mechanics. J Appl Phys 98:124301
Wang Q, Wang CM (2007) The constitutive relation and small scale parameter of nonlocal continuum mechanics for modelling carbon nanotubes. Nanotechnology 18:075702
Wang CM, Zhang YY, Ramesh SS, Kitipornchai S (2006) Buckling analysis of micro- and nano-rods/tubes based on nonlocal Timoshenko beam theory. J Phys D Appl Phys 39:3904–3909
Wang CM, Zhang YY, He XQ (2007) Vibration of nonlocal Timoshenko beams. Nanotechnology 18:105401
Wang CM, Kitipornchai S, Lim CW, Eisenberger M (2008) Beam bending solutions based on nonlocal Timoshenko beam theory. J Eng Mech ASCE 134:475–481
Yang F, Chong ACM, Lam DCC, Tong P (2002) Couple stress based strain gradient theory for elasticity. Int J Solids Struct 39:2731–2743
Author information
Authors and Affiliations
Corresponding author
Appendix: Nonlocal Timoshenko Beam element matrices
Appendix: Nonlocal Timoshenko Beam element matrices
The element matrices for nonlocal Timoshenko beam are presented as
where \(\left[ {C_{1} } \right]\), \(\left[ {C_{2} } \right]\), \(\left[ {C_{3} } \right]\) and \(\left[ {C_{4} } \right]\) are defined as
Rights and permissions
About this article

Cite this article
Ghannadpour, S.A.M. A Variational Formulation to Find Finite Element Bending, Buckling and Vibration Equations of Nonlocal Timoshenko Beams. Iran J Sci Technol Trans Mech Eng 43 (Suppl 1), 493–502 (2019). https://doi.org/10.1007/s40997-018-0172-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40997-018-0172-y