
Abstract
This paper deals with the inverse problem of determining a space-wise-dependent heat source in the heat equation. This problem is ill-posed and we apply a Tikhonov regularization method to solve it. The existence and uniqueness of the minimizer of the Tikhonov regularization functional are firstly proved. By an optimal control method, we can obtain a stable solution. The numerical results show that our proposed procedure yields stable and accurate approximation.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
In many engineering contexts, there are many inverse problems for heat equation. The inverse problem for heat diffusion equation can be roughly divided into five principal classes. The first one is backward heat conduction problem. The problem of this kind is also known as reversed-time problem for determination of the initial temperature distribution from the known distribution at the final moment of time. The second one is the identification of the temperature or the flux of temperature at one of the inaccessible boundaries from the over-posed data at the other one which is accessible. This problem is also known as inverse heat conduction problem. The third one is the coefficient identification from over-posed data at the boundaries. The fourth one is the determination of the shape of the unknown boundaries or the crack inside the heat conduction body. The last one is the identification of the heat source, e.g., [1, 7].
In this paper, we focus on the problem of identifying the heat source from measured data for heat equation. This model has many important applications in practice, e.g., in finding a pollution source intensity and also for designing the final state in melting and freezing processes. The problem is ill-posed and any small change in the input data may result in a dramatic change in the solution. Numerical computation is very difficult. To obtain a stable numerical solution for these kinds of ill-posed problems, some regularization strategies should be applied.
The problem of identification of space-wise-dependent heat source has been discussed by many authors. For theoretical papers, we can refer to the references [2,3,4, 10, 12, 20,21,22]. For computational papers, we can refer to the references [5, 6, 11, 13,14,15,16,17,18,19] and the references therein.
Recently, Johansson and Lesnic proposed an iterative method [8] and a variational method [9] for solving the problem of this kind numerically. However, these methods need to solve a direct problem at each iterative step. The computational cost is very high. In this paper, we present a Tikhonov regularization method for solving this problem. Following the idea of [23] where the authors deal with the problem of identifying coefficient, we give some theoretical results. Being different from the work of numerical parts in [23], we give a new computational method for solving inverse heat source problem. The method is simple and effective. The main aim of this paper is to provide a new method for solving the problem of unknown heat source. Furthermore, our method can be extend to the case of higher dimensions easily.
This paper is organized as follows. In Sect. 2, we present the formulation of the inverse problem; in Sects. 3 and 4, some theoretical results are obtained; in Sect. 5, some numerical results are shown. Finally, we give a conclusion in Sect. 6.
2 Inverse Heat Source Problem
We consider the following inverse problem: find the temperature u and the heat source f which satisfy the heat conduction equation, namely
Problem I
with the initial data and boundary conditions
here we need to reconstruct f(x) from the measured data \(g_\epsilon (x)\). Assume the measured data \(g_\epsilon (x)\) and exact data \(u(x,T):=g(x)\) satisfy
where \(\Vert \cdot \Vert \) denotes the \(L^2\)-norm and \(\epsilon \) is the known noise level.
Assume that the given functions satisfy the compatibility conditions
We know that the Problem I is ill-posed and the degree of the Problem I is equivalent to that of second-order numerical differentiation.
For the direct problem (2.1)–(2.3), using the results of [Lions, Chapter 3], we have
Lemma 1
Suppose that \(\varphi \) and f belong to \(L^2(0,1)\). Then the problem (2.1)–(2.3) has a unique solution \(u\in L^2(0,T;H_0^1(0,1))\cap C([0,T];H_0^1(0,1))\) in the distributional sense and
where C is a constant.
3 Tikhonov Regularization Method
Consider the following optimal control problem
Problem P Find \({\overline{f}} \in F\) such that
where
u(x, t; f) is the solution of Eqs. (2.1)–(2.3) for a given heat source \(f(x)\in F\) and \(\alpha \) is the regularization parameter.
By using standard method, we can obtain existence of the minimizer of Problem P.
Theorem 1
There exists a minimizer \({\overline{f}}\in F\) of J(f), i.e.,
The following theorem shows the necessary condition of existence of the minimizer \({\overline{f}}\):
Theorem 2
Let \({\overline{f}}\) be the solution of the Problem P. Then there exists a triple of functions \((u,v;{\overline{f}})\) satisfying the following system:
and
for all \(h \in F\).
Proof
For any \(h\in F\), \(0\le \delta \le 1\), we have
Then
Let \(u_\delta \) be the solution of Eq. (2.1) with \(f=f_\delta \). Since \({\overline{f}}\) is an optimal solution, we have
Denote \(\widetilde{u_\delta }:=\frac{\partial u_\delta }{\partial \delta }\), direct calculations lead to the following system:
Denote \(\eta =\widetilde{u_\delta }|_{\delta =0}\), then \(\eta \) satisfies
From (3.10), we have
Let \({\mathfrak {L}}\eta :=\eta _t-\eta _{xx}\), and suppose v is the solution of the following problem:
where \(\mathfrak {L^*}\) is the adjoint operator of the operator \({\mathfrak {L}}\). From (3.12) and (3.14), we have
Combining (3.13) and (3.15), we can obtain
Thus, we completed the proof of Theorem 2. \(\square \)
4 Uniqueness of the Minimizer \({\overline{f}}\)
Suppose that \(\overline{f_1}\) and \(\overline{f_2}\) are two minimizers of the optimal problem P, and \(\{u_i,\eta _i\}\), \((i=1,2)\) are the solutions of system (3.5) and (3.12) in which \({\overline{f}}=\overline{f_i}\), \((i=1,2)\), respectively.
To establish the result of uniqueness, we need the following lemmas. Since this result is obvious, here we omit the proof for them.
Lemma 2
For each bounded continuous function \(l(x)\in C(0,1)\), we have
where \(x_0\) is a fixed point in the interval (0, 1).
Now the following theorem is the main result of this section.
Theorem 3
Suppose \(\overline{f_1}\) and \(\overline{f_2}\) are two minimizers of the optimal control problem P corresponding to \(g_{\epsilon ,1}\) and \(g_{\epsilon ,2}\), respectively. If there exists a fixed point \(x_0\) such that
and assume
we have
Proof
By taking \(h=\overline{f_2}\) when \({\overline{f}}=\overline{f_1}\) and taking \(h=\overline{f_1}\) when \({\overline{f}}=\overline{f_2}\) in (3.13), we get
where \(\overline{f_1}\) and \(\overline{f_2}\) are two minimizers of the optimal problem P corresponding to \(g_{\epsilon ,1}\) and \(g_{\epsilon ,2}\), respectively. And \(\{u_i,\eta _i\}\), \((i=1,2)\) are the solutions of system (3.5) and (3.12) in which \({\overline{f}}=\overline{f_i}\), \((i=1,2)\), respectively. Setting
then W and H satisfy
By the extremum principle, we know that Eq. (4.5) only has zero solution , thus we have
Further, \(\eta _{1}\) satisfies the following equation
Using Lemma 2 , we obtain
By the assumption of Theorem 3, we have
On the other hand, combining (4.2), (4.3), (4.6) and (4.8), we obtain
Combining (4.10), this yields
When
we have
This ends the proof. \(\square \)
Remark 1
Theorem 3 can be generalized to the following problem:
Problem P1. Find the heat source f(x, t) from extra data \(u(x,t)=g(x,t)\) which satisfy
We want to reconstruct f(x, t), first find \(f(x,t_n)\) where \(t_n=nh\) and \(h=T/n\), \(n=0,1,\ldots ,N\) such that \(J(f(\cdot ,t_n))=\inf _{f\in F}J_n(f)\). Thus we can obtain the solutions \(f(x,t_n)\) for \(n=0,1,\ldots ,N\). Then the \(f(x,t_n)\) can be taken as an approximate solution to f(x, t).
5 Numerical Results
In this section, in order to demonstrate the effectiveness of Tikhonov regularization, we do the numerical experiment by using MATLAB in IEEE double precision with unit round off \(1.1\cdot 10^{-16}\). We consider an example. We try to reconstruct the heat source defined by
If we consider homogeneous boundary conditions [see (2.1)–(2.3)]
The initial condition is given by
Then in this case the forward problem given by (2.1)–(2.3) with f given by (5.1) has the analytical solution
where
is the Fourier coefficient of f(x). From (5.4), we get
Define a linear operator \(A:f\rightarrow g\), then the inverse source problem can be rewritten as the following operator equation:
Using (5.5), it holds
Consequently, A is a linear self-adjoint compact operator, i.e., \(A^{*}=A\). For noisy data \(g_\epsilon (x)\), the Tikhonov regularization is to seek a function \(f^{\epsilon ,\alpha }\) which minimizes the Tikhonov function
where \( \alpha >0\) is known as the regularization parameter.
It follows from simple calculation we know its minimizer \(f^{\epsilon ,\alpha }\) satisfies
From (5.7), we know that
On the other hand
further
From (5.7), we have
where \(g_{\epsilon ,n}\) is the Fourier coefficient of \(g_{\epsilon }(x)\). Applying (5.10), (5.11), (5.13) and (5.14), we obtain
We use the function randn given in MATLAB to generate the noisy data, then its discrete noisy version is
Using this noisy data, we compute the regularizing solution
To show the accuracy of numerical solution, we compute the approximate \(l^{2}\) error denoted by
and the approximate relative error in \(l^{2}\) norm denoted by
we take the regularization parameter as \(\alpha =\epsilon ^{2}\) to observe the convergence of our regularizing solutions. we choose \(N = 50, M=100 \).
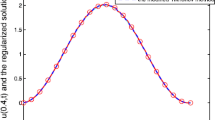
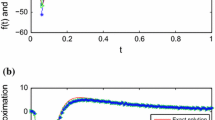
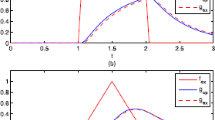
In the numerical experiment, Fig. 1a shows the numerical approximations to f(x) without regularization have a little large amplitude oscillation, this means the problem is unstable and ill-posed. From Fig. 1b and Table 1, we can find that the smaller the \(\epsilon \) is, the better the computed approximation is. This indicates that when using the proposed regularization method, the numerical results are recovered stable.

The exact solution and the regularized solutions for example. a No regularization and b Tikhonov regularization
Remark 2
In our numerical experiments, we take the regularization parameter as \(\alpha =\epsilon ^{2}\) to observe the convergence of our regularizing solutions. We can also choose the regularizing parameter \(\alpha \) using the a priori choice strategy based on the regularity of f(x) and the a posterior scheme by Morozov’s discrepancy principle to obtain the convergence rates and better numerical results. This should be future work.
6 Conclusion
In this paper, we investigate an inverse space-dependent source problem for a heat equation. We regularize it by the Tikhonov regularization method for overcoming its ill-posedness. The existence and uniqueness of the minimizer of the Tikhonov regularization functional are obtained. An optimal control method is used to get a stable solution. Numerical examples show that our proposed regularization methods are effective and stable.
References
Badia, A.E., Duong, T.H.: On an inverse source problem for the heat equation: application to a detection problem. J. Inverse Ill-Posed Probl. 10, 585–589 (2002)
Cannon, J.R.: Determination of an unknown heat source from overspecified boundary data. SIAM J. Numer. Anal. 5, 275–286 (1986)
Choulli, M., Yamamoto, M.: Conditional stability in determining a heat source. J. Inverse Ill-Posed Probl. 12, 233–336 (2004)
Erdem, A., Lesnic, D., Hasanov, A.: Identification of a spacewise dependent heat source. Appl. Math. Model. 37, 10231–10244 (2013)
Farcas, A., Lesnic, D.: The boundary-element method for the determination of a heat source dependent on one variable. J. Eng. Math. 54, 375–388 (2006)
Fatullayev, A.G.: Numerical solution of the inverse problem of determining an unkown source term in a heat equation. Math. Comput. Simul. 58, 247–253 (2002)
Ikehata, M.: An inverse source problem for the heat equation and the enclosure method. Inverse Probl. 23, 183–202 (2007)
Johansson, T., Lesnic, D.: Determination of a spacewise dependent heat source. J. Comput. Appl. Math. 209, 66–80 (2007)
Johansson, T., Lesnic, D.: A variational method for identifying a spacewise-dependent heat source. IMA J. Appl. Math. 72(6), 748–760 (2007)
Li, G.: Data compatibility and conditional stability for an inverse source problem in the heat equation. Appl. Math. Comput. 173(1), 566–581 (2006)
Ling, L., Hon, Y.C., Yamamoto, M., Takeuchi, T.: Identification of source locations in two-dimensional heat equations. Inverse Probl. 22, 1289–1305 (2006)
Savateev, E.G.: On problems of determining the source function in a parabolic equation. J. Inverse Ill-Posed Probl. 3, 83–102 (1995)
Shi, C., Wang, C., Wei, T.: Numerical solution for an inverse heat source problem by an iterative method. Appl. Math. Comput. 244(2), 577–597 (2014)
Shivanian, E., Jafarabadi, A.: Inverse Cauchy problem of annulus domains in the framework of spectral meshless radial point interpolation. Eng. Comput. 33(3), 431–442 (2017)
Shivanian, E., Jafarabadi, A.: Numerical solution of twodimensional inverse force function in the wave equation with nonlocal boundary conditions. Inverse Probl. Sci. Eng. 25(12), 1743–1767 (2017)
Shivanian, E., Jafarabadi, A.: An inverse problem of identifying the control function in two and three-dimensional parabolic equations through the spectral meshless radial point interpolation. Appl. Math. Comput. 325, 82–101 (2018)
Shivanian, E., Jafarabadi, A.: The spectral meshless radial point interpolation method for solving an inverse source problem of the time-fractional diffusion equation. Appl. Numer. Math. 129, 1–25 (2018)
Jafarabadi, A., Shivanian, E.: The numerical solution for the time-fractional inverse problem of diffusion equation. Eng. Anal. Bound. Elem. 91, 50–59 (2018)
Shivanian, E., Khodabandehlo, H.R.: Application of meshless local radial point interpolation (MLRPI) on a one-dimensional inverse heat conduction problem. Ain Shams Eng. J. 7(3), 993–1000 (2016)
Solov’ev, V.V.: Solvability of the inverse problem of finding a source, using overdetermination on the upper base for a parabolic equation. Differ. Equ. 25, 1114–1119 (1990)
Trong, D., Quan, P., Alain, P.: Determination of a two-dimensional heat source: Uniqueness, regularization and error estimate. J. Comput. Appl. Math. 191, 50–67 (2005)
Yamamoto, M.: Conditional stability in determination of force terms of heat equaitons in a rectangle. Math. Comput. Model. 18, 79–88 (1993)
Yang, L., Yu, J., Deng, Z.: An inverse problem of identifying the coefficient of parabolic equation. Appl. Math. Model. 32, 1984–1995 (2008)
Acknowledgements
We would like to thank the anonymous referees and the associate editor for their valuable comments and helpful suggestions to improve the earlier version of the paper. This research is partially supported by the Natural Science Foundation of China (No. 11661072), the Natural Science Foundation of Northwest Normal University, China (No. NWNU-LKQN-17-5).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Ahmad Izani Md. Ismail.
Rights and permissions
About this article

Cite this article
Yang, S., Xiong, X. A Tikhonov Regularization Method for Solving an Inverse Heat Source Problem. Bull. Malays. Math. Sci. Soc. 43, 441–452 (2020). https://doi.org/10.1007/s40840-018-0693-y
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40840-018-0693-y