
Abstract
Under investigation in this paper are the nonlocal symmetries and consistent Riccati expansion integrability of the (2 + 1)-dimensional Boussinesq equation, which can be used to describe the propagation of long waves in shallow water. By constructing the Bäcklund transformation, we obtain the truncated Painlevé expansion of the system. Its Schwarzian form is also derived, whose nonlocal symmetry is localized to provide the corresponding nonlocal group. Furthermore, we verify that the system is solvable via the consistent Riccati expansion (CRE). Based on the CRE, the interaction solutions between soliton and cnoidal periodic wave are explicitly studied.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
It is well known that nonlinear evolution equation (NLEEs) and their solutions play some important roles in mathematics, physics, chemistry, biology and other processes. In nonlinear science, Lie symmetry [1, 2] and Painlevé analysis [3, 4] are two kinds of effective methods for constructing exact solutions. However, due to the presence of nonlocal terms, the nonlocal symmetries cannot be determined completely in an algorithmic way. In latter studies, different from the traditional way to construct symmetries, one can start from the group transformation, such as the Darboux transformation (DT) [5], Bäcklund transformation (BT) [6], Möbious (conformal) invariant form [7], and potential system [8, 9]. Recently, Lou [10, 11] proposed the consistent Riccati expansion (CRE) method, which is used to identify CRE solvable systems (if the system has a CRE, then the system is defined to CRE solvable), and find the various interaction solutions between different types of excitations. Moreover, Lou also finds that the nonlocal symmetry from the truncated Painlevé expansion is just the residual of the expansion with respect to the singular manifold which is called residual symmetry [12, 13]. This method has been extended to many nonlinear differential equations [14,15,16,17,18,19,20,21].
In 1872, Boussinesq derived an equation describing the propagation of small amplitude, long waves in shallow water. This equation named by Boussinesq equation has traveling wave solutions called solitary waves, and their existence scientifically is proved. It is precisely because of Boussinesq’s scientific explanation that the study of the generalized Boussinesq water equation has been attracted the attention of many mathematicians, physicists and engineers. The classical Boussinesq water equation can be written by
where u(x, t) is the elevation of the free surface of the fluid, the subscripts denote partial derivatives, and the constant coefficients \(\alpha \) and \(\beta \) depend on the depth of the fluid and the characteristic speed of the long waves. The equation is used to analyze the long waves in shallow water. It is also used in the analysis of many other physical applications such as the percolation of water in the porous subsurface of a horizontal layer of material.
The two-dimensional Boussinesq equation describes the propagation of gravity waves on the surface of water, in particular the head-on collision of oblique waves. The generalized (2 + 1)-dimensional Boussinesq equation [22] is usually written as
where \(\alpha , \beta , \gamma \) and \(\delta \) are arbitrary constants with \(\gamma \delta \ne 0 \). The two-dimensional equation combines the two-way propagation of the classical Boussinesq equation with the (weak) dependence on a second spatial variable, as occurs in the two-dimensional Korteweg–de Vries equation [23]. If \(\alpha =\beta =\gamma =\delta =1\), Eq. (2) is reduced to the following equation
where the suffices refer to differentiation with respect to time t and the two space variables x and y. Recently, Chen et al. [24] have studied the (2 + 1)-dimensional Boussinesq equation by using the new generalized transformation in homogeneous balance method (HBM). As a result, many explicit exact solutions, which contain new solitary wave solutions, periodic wave solutions and the combined formal solitary wave solutions and periodic wave solutions, are obtained. Tian et al. [25] have studied the Bäcklund transformation, infinite conservation laws and periodic wave solutions to a generalized (2 + 1)-dimensional Boussinesq equation. In this paper, we will study its soliton–cnoidal wave interaction solutions by using nonlocal symmetries of the equation.
In this paper, we concentrate on investigating the residual symmetries and CRE integrability of Eq. (3), which have not yet been discovered before. Besides we also study the soliton–cnoidal wave interaction solution of Eq. (3).
The paper is organized as follows. In Sect. 2, by use of the truncated Painlevé method, we obtain the nonlocal symmetries of the (2 + 1)-dimensional Boussinesq equation, and by means of localization process, we derive a new type of finite symmetry transformations. In Sect. 3, the (2 + 1)-dimensional Boussinesq equation is verified CRE solvable. Based on the CTE method, the interaction solution between a soliton and a cnoidal periodic wave of the equation is given. The last section is provided for a short summary and discussion.
2 Nonlocal Symmetry and Its Localization
2.1 Nonlocal Symmetry via the Truncated Painlevé Expansion
It is well known that the truncated Painlevé is one of the most effective methods to find traveling and nontraveling for NLEEs. By use of the Painlevé analysis, various integrate properties can be easily found if the studied model has Painlevé property , i.e., it is Painlevé integrable.
For Eq. (3), the truncated Painlevé expansion takes the general form [26]
where \(\phi \) is the singular manifold, and \(u_{0}, u_{1}\) and \(u_{2}\) are the functions of (x, y, t) to be determined later.
Substituting Eq. (4) into Eq. (3) yields
Vanishing all the coefficients of each powers of \(\phi \), we obtain
Therefore, we have the solution of Eq. (3) as follows
and Eq. (3) successfully satisfies the following Schwarzian form
where the notations C , K and S are defined as
Hence, from the standard truncated Painlevé expansion, we get the Bäcklund transformation theorem as follows:
Theorem 2.1
(Bäcklund transformation theorem) Let \(\phi \) satisfy (8), then Eq. (7) is a Bäcklund transformation between \(\phi \) and the solution u of Eq. (3).
On the basis of the truncated Painlevé expansion(4), we can construct a series of exact solutions by employing Theorem 2.1. But here we are mainly focusing on constructing the nonlocal symmetry of Eq. (3), which is related to the expression (4).
As everyone knows, under the Möbious transformation
the Schwarzian equation (8) is invariant.
Due to above Möbious transformation, the Lie point symmetries of (8) have the following form
where \(a_{1}, b_{1}\) and \(c_{1}\) are arbitrary constants.
From the truncated Painlevé expansion (4) and Theorem 2.1, a new nonlocal symmetry of Eq. (3) is presented and studied as follows.
Theorem 2.2
(nonlocal symmetry theorem) Eq. (3) admits the following nonlocal symmetry
where u and \(\phi \) satisfy the Bäcklund transformation (7).
Proof
Under the invariant property
we know that the symmetry equation for Eq. (3) reads
By direct calculation, one can show that symmetry equations (14) with the help of (8) and BT (7) yield the nonlocal symmetry (12). \(\square \)
2.2 Localization Residual Symmetry
In order to look for the finite symmetry transformation of the nonlocal residual symmetry, we have to solve the following initial value problem:
where \(\varepsilon \) is the group parameter.
Nevertheless, since the intervene of the function \(\hat{\phi }_{x}\) and its differentiation, it is very difficult to solve the infinite problem (15). So, we need to prolong the original system such that nonlocal residual symmetry becomes the local Lie point symmetry for a closed system. To this end, we introduce new variables to eliminate the space derivatives of \(\phi \)
It is easy to find nonlocal residual symmetry of (3) can be localized to the Lie point symmetry
for the prolonged system
With the Lie point symmetry vector, the results (17) show that the residual symmetries (12) are localized in the properly prolonged system (18)
Relatively, the initial value problem (15) becomes
That is to say, the symmetries referred to the truncated Painlevé expansion are just a special Lie point symmetry of the extended system.
Then, by solving the corresponding initial value problem, it is not difficult to obtain the transformation group related to the symmetry (20) of the prolonged system as follows:
Theorem 2.3
If \(\{u, f, g, h, \phi \}\) is a solution of the prolonged system (18), so is \(\{\hat{u}, \hat{f}, \hat{g}, \hat{h}, \hat{\phi }\}\) given by
with arbitrary group parameter \(\varepsilon \).
3 CRE Solvability and Soliton–Cnoidal Waves Solutions
In this section, we mainly introduce the CRE , and based on the CRE, we obtain the CTE. Besides, we also study the interactions between a soliton and a cnoidal wave for Eq. (3).
3.1 Preliminary
In this section, we mainly introduce the conceptions of CRE and CRE solvability for a given derivative nonlinear polynomial system
We are committed to find the following possible truncated Painlevé expansion solution
where R(w) is a solution of the Riccati equation
It includes tanh(w) as a special case, and w is an arbitrary function of \(\{x_{1},x_{2},\ldots ,x_{n},t\}\) and \(a_{0}\), \(a_{1}\), \(a_{2}\) are arbitrary constants. By using the leading order analysis of (22), we obtain n and m, meanwhile, by substituting (23) with (24) into (22) and by vanishing all the coefficients of the power of R(w), then we get all the expansion coefficient functions \(u_{i}\).
Based on the above analysis and Ref. [10], we have the following theorem:
Theorem 3.1
The expansion (23) is a consistent Riccati expansion (CRE) and the nonlinear system (22) is CRE solvable provided that the system for \(u_{i} (i=1,2,\ldots ,n)\) and w obtained by vanishing all the coefficients of the powers of R(w) after substituting (23) with (24) into (22) are consistent, or not over-determined.
3.2 CRE Solvability
In this section, we apply CRE method to Eq. (3). From the above analysis, the possible truncated expansion of Eq. (3) has the following form
where \(u_{0}, u_{1},u_{2}\) are the undetermined functions of (x, y, t).
Substituting (24) and (25) into (3), and vanishing coefficients of all the same powers of R(w), we have nine over-determined equations for the only six undetermined functions \(u_{0}, u_{1}, u_{2}\) and w. Fortunately, the over-determined is consistent and the final result reads
and the function w satisfies a generalization of the Schwarzian form of (3)
where the notations \(C_{1}\) , \(K_{1}\), \(S_{1}\) and \(\delta \) are defined by
From above discussion, we find that all the coefficients of R(w) are zero. Apparently, because the over-determined system is consistent, we call Eq. (3) CRE solvable. Then, we have the following theorem:
Theorem 3.2
If w is a solution of
then
is the solution of Eq. (3) with \(R_{w}\) being the solution of the Riccati equation (24).
3.3 CTE Solvability
Apparently, the Riccati equation (24) has a special solution
Hence, the truncated expansion expression (25) can be changed into the following form:
where \(u_{0}, u_{1}, u_{2}\) and w are determined by (24) , (26) and (27).
We know that the solution (32) is just consistent with Theorem 3.2. The simplified CRE can be termed as consistent tanh expansion (CTE). Clearly, a CRE solvable system must be CTE solvable, and vice versa. If the system is CTE solvable, some important solitary wave solutions can be constructed directly. In order to clarify this relation, we give the following Bäcklund transformation which comes from the aforementioned CTE theorem and use it to find exact solutions.
Theorem 3.3
(Bäcklund transformation Theorem ) If w is a solution of Eq. (27) with \(\delta =4, a_{0}=1, a_{1}=0, a_{2}=-1\), then
is a Bäcklund transformation between w and the solution u of Eq. (3) with R(W) satisfying the Riccati equation (24).
3.4 Soliton–Cnoidal Wave Interaction Solution of Eq. (3)
It is well known that the interaction solutions between soliton and cnoidal periodic waves can display many more interesting physical phenomena, such as the Fermionic quantum plasma [27]. In what follows, based on the symbolic computations [28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58], we mainly seek the interaction wave solution of Eq. (27) with respect to w.
To obtain the solution of Eq. (3), we consider w in the form
where g is a function of x, y and t. It will result in the interaction solutions between a soliton and other waves. By using Theorem 3.3, some nontrivial solutions of Eq. (3) can be obtained from some quite trivial of Eq. (27).
Soliton Solution For Eq. (27), we take the following trivial solution
where \(k, l, \omega \) and g are the arbitrary constants. Substituting (36) into Eq. (32) yields the following single soliton solution
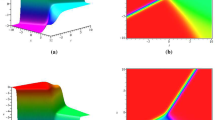
Figure 1 displays single soliton solution for u shown by (36) at \(t=1\) with the parameter selected as
Figure 1a represents a three-dimensional space graph of single soliton solution with small excited state. Figure 1b represents a three-dimensional density graph of single soliton solution. Figure 1c represents the wave propagation of the wave along x axis.

Soliton–cnoidal wave solutions From Ref. [10], it is easy to find that the solution w characters the interactions between a soliton and a cnoidal wave for Eq. (3), which is of the form
where
satisfies
with
which lead to the following explicit solution of Eq. (3)
Obviously, the explicit solution of (40) can be expressed in terms of different types of the Jacobi elliptic functions. Therefore, the solution (42) indicates the interactions between a soliton and cnoidal periodic waves. In the following, only one type of the special soliton–cnoidal wave is expressed to see the interaction property more intuitively.
A simple solution of (40) is given by
where \(\text{ sn }(mX,n)\) is the usual Jacobi elliptic sine function. The modulus n of the Jacobi elliptic function satisfies: \(0\le n\le 1\) . When \(n\rightarrow 1\), \(\text{ sn }(\xi )\) degenerates as hyperbolic function \(\tanh (\xi )\), and when \(n\rightarrow 0\), \(\text{ sn }(\xi )\) degenerates as a trigonometric function \(\sin (\xi )\).
Then, substituting Eq. (43) with Eq. (41) into Eq. (40) and setting the coefficients of \(\text{ sn }(\xi )\), \(\text{ cn }(\xi )\), \(\text{ dn }(\xi )\) equal to zero yields the following soliton–cnoidal wave interaction solution of (3)
Hence, one kind of soliton–cnoidal wave solutions is obtained by taking Eq. (43) and
with the parameter requirement (44) into the general solution (42).
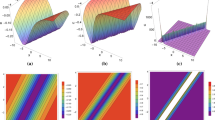
Figures 2 and 3 display this kind of soliton–cnoidal wave solutions. This kind of solution describing solitons moving on a cnoidal wave background instead of on the plane continuous wave background is very important in the real world and can be easily applicable to the analysis of physically interesting processes.

(Color online) The kink soliton+cnoidal periodic wave solutions for u by choosing suitable parameters: \(m=1.5, k_{1}=1, \omega _{0}=-1.6, l_{1}=1, \mu _{0}=\sqrt{3}, l_{0}=-1\). a evolution of the soliton–cnoidal structure; b the profile of the special structure at \(y = 0\), \(t=0\); c the profile of the special structure at \(x = 0\), \(t=0\)

(Color online) The kink soliton+cnoidal periodic wave solutions for u by choosing suitable parameters: \(m=4, k_{1}=1, \omega _{0}=-1.6, l_{1}=1, \mu _{0}=\sqrt{3}, l_{0}=-1\). a evolution of the soliton–cnoidal structure; b the profile of the special structure at \(y = 0\), \(t=0\); c the profile of the special structure at \(x = 0\), \(t=0\)
4 Conclusion and Discussions
In this work, we mainly have studied the Bäcklund transformations, nonlocal symmetry and soliton–cnoidal interaction solutions of the (2 + 1)-dimensional Boussinesq equation. Firstly, by use of the truncated Painlevé expansion method, the nonlocal symmetry and BT have been obtained, respectively. Then, with the help of the arbitrary parameter in the Schwarzian form of the system, many infinitely nonlocal symmetries have also been derived. The symmetry group transformation of the prolonged symmetry has been derived by using Lie’s first theorem. Furthermore, under the CRE, the system has been proved integrable. Based on a special form of CRE, that’s CTE method, we have obtained a BT. Finally, by means of CRE method, we have derived the interaction solution between a soliton and a cnoidal periodic wave.
It is worthwhile to further study the other types of effective methods which can also be extended to study the relationship between different types of nonlinearity. The discussed method is much meaningful for us to do further study nonlinear problems in mathematical physics.
References
Olver, P.J.: Applications of Lie Groups to Differential Equations, 2nd edn. Springer, New York (1993)
Bluman, G.W., Kumei, S.: Symmetries and Differential Equations. Springer, Berlin (1989)
Weiss, J., Tabor, M., Carnevale, G.: The Painlevé property for partial differential equations. J. Math. Phys. 24, 522–526 (1983)
Conte, R.: Invariant Painlevé analysis of partial differential equations. Phys. Lett. A 140, 383–390 (1989)
Lou, S.Y., Hu, X.B.: Non-local symmetries via Darboux transformations. J. Phys. A Math. Gen. 30, L95–L100 (1997)
Lou, S.Y., Hu, X.R., Chen, R.: Nonlocal symmetries related to Bäcklund transformation and their applications. J. Phys. A 45, 155209 (2012)
Lou, S.Y.: Conformal invariance and integrable models. J. Phys. A Math. Phys. 30, 4803–4813 (1997)
Bluman, G.W., Cheviakov, A.F., Anco, S.C.: Applications of Symmetry Methods to Partial Differential Equations. Springer, New York (2010)
Bluman, G.W., Yan, Z.Y.: Nonclassical potential solutions of partial differential equations. Eur. J. Appl. Math. 16, 239–261 (2005)
Lou, S.Y.: Consistent Riccati expansion for integrable systems. Stud. Appl. Math. 134, 372–402 (2015)
Lou, S.Y., Cheng, X.P., Tang, X.Y.: Dressed dark solitons of the defocusing nonlinear Schrödinger equation. Chin. Phys. Lett. 31, 070201 (2014)
Lou, S.Y.: Residual symmetries and Bäcklund transformations. arXiv:1308.1140v1
Hu, X.R., Li, Y.Q.: Nonlocal symmetry and soliton–cnoidal wave solutions of the Bogoyavlenskii coupled KdV system. Appl. Math. Lett. 51, 20–26 (2016)
Ren, B., Liu, X.Z., Liu, P.: Nonlocal symmetry reductions, CTE method and exact solutions for higher-order KdV equation. Commun. Theor. Phys. 63, 125–128 (2015)
Feng, L.L., Tian, S.F., Zhang, T.T.: Nonlocal symmetries and consistent Riccati expansions of the (2 + 1)-dimensional dispersive long wave equation. Z. Naturforsch. A 72(5), 425–431 (2017)
Wang, X.B., Tian, S.F., Qin, C.Y., Zhang, T.T.: Lie symmetry analysis, analytical solutions, and conservation laws of the generalised Whitham–Broer–Kaup-like equations. Z. Naturforsch. A 72(3), 269–279 (2017)
Cheng, X.P., Lou, S.Y., Chen, C.L., Tang, X.Y.: Interactions between solitons and other nonlinear Schrödinger waves. Phys. Rev. E 89, 043202 (2014)
Tian, S.F., Zhang, Y.F., Feng, B.L., Zhang, H.Q.: On the Lie algebras, generalized symmetries and Darboux transformations of the fifth-order evolution equations in shallow water. Chin. Ann. Math. B 36(4), 543–560 (2015)
Feng, L.L., Tian, S.F., Zhang, T.T., Zhou, J.: Nonlocal symmetries, consistent Riccati expansion, and analytical solutions of the variant Boussinesq system. Z. Naturforsch. A 72(7), 655–663 (2017)
Ma, P.L., Tian, S.F., Zhang, T.T.: On symmetry-preserving difference scheme to a generalized Benjamin equation and third-order Burgers equation. Appl. Math. Lett. 50, 146–152 (2015)
Tu, J.M., Tian, S.F., Xu, M.J., Zhang, T.T.: On Lie symmetries, optimal systems and explicit solutions to the Kudryashov–Sinelshchikov equation. Appl. Math. Comput. 275, 345–352 (2016)
Chen, H.T., Zhang, H.Q.: New double periodic and multiple soliton solutions of the generalized (2 + 1)-dimensional Boussinesq equation. Chaos Solitons Fractals 20, 765–769 (2004)
Johnson, R.S.: A two-dimensional Boussinesq equation for water waves and some of its solutions. J. Fluid Mech. 323, 65–78 (1996)
Yan, X.W., Tian, S.F., Dong, M.J., Zhou, L., Zhang, T.T.: Characteristics of solitary wave, homoclinic breather wave and rogue wave solutions in a (2 + 1)-dimensional generalized breaking soliton equation. Comput. Math. Appl. 76(1), 179–186 (2018)
Xu, M.J., Tian, S.F., Tu, J.M., Zhang, T.T.: Bäcklund transformation, infinite conservation laws and periodic wave solutions to a generalized (2 + 1)-dimensional Boussinesq equation. Nonlinear Anal. RWA 31, 388–408 (2016)
Weiss, J.: The Painlevé property for partial differential equations. II: Bäcklund transformation, Lax pairs, and the Schwarzian derivative. J. Math. Phys. 24, 1405 (1983)
Keane, A.J., Mushtaq, A., Wheatland, M.S.: Alfvén solitons in a Fermionic quantum plasma. Phys. Rev. E 83, 066407 (2011)
Wazwaz, A.M.: The Hirota’s direct method and the tanh–coth method for multiple-soliton solutions of the Sawada–Kotera–Ito seventh-order equation. Appl. Math. Comput. 199, 133–138 (2008)
Tian, S.F.: Asymptotic behavior of a weakly dissipative modified two-component Dullin–Gottwald–Holm system. Appl. Math. Lett. 83, 65–72 (2018)
Wang, G.W., Xu, T.Z., Liu, X.Q.: New explicit solutions of the fifth-order KdV equation with variable coefficients. Bull. Malays. Math. Sci. Soc. 37(3), 769–778 (2014)
Wang, G.W., Kara, A.H., Vega-Guzmand, J., Biswas, A.: Group analysis, nonlinear self-adjointness, conservation laws and soliton solutions for the mKdV systems. Nonlinear Anal. Model. Control 22, 334–346 (2017)
Tian, S.F., Zhang, T.T.: Long-time asymptotic behavior for the Gerdjikov–Ivanov type of derivative nonlinear Schrödinger equation with time-periodic boundary condition. Proc. Am. Math. Soc. 146(4), 1713–1729 (2018)
Gurefe, Y., Misirli, E., Pandir, Y., Sonmezoglu, A., Ekici, M.: New exact solutions of the Davey–Stewartson equation with power-law nonlinearity. Bull. Malays. Math. Sci. Soc. 38, 1223–1234 (2015)
Jamal, S., Mathebula, A.: Generalized symmetries and recursive operators of some diffusive equations. Bull. Malays. Math. Sci. Soc. (2017). https://doi.org/10.1007/s40840-017-0510-z
Ma, W.X., Zhu, Z.N.: Solving the (3 + 1)-dimensional generalized KP and BKP equations by the multiple exp-function algorithm. Appl. Math. Comput. 218, 11871–11879 (2012)
Kim, H., Choi, J.H.: Exact solutions of a diffusive predator–prey system by the generalized Riccati equation. Bull. Malays. Math. Sci. Soc. 39, 1125–1143 (2016)
Tian, S.F.: Initial-boundary value problems of the coupled modified Korteweg–de Vries equation on the half-line via the Fokas method. J. Phys. A Math. Theor. 50(39), 395204 (2017)
Wang, X.B., Tian, S.F., Yan, H., Zhang, T.T.: On the solitary waves, breather waves and rogue waves to a generalized (3 + 1)-dimensional Kadomtsev–Petviashvili equation. Comput. Math. Appl. 74(3), 556–563 (2017)
Qin, C.Y., Tian, S.F., Wang, X.B., Zhang, T.T., Li, J.: Rogue waves, bright-dark solitons and traveling wave solutions of the (3 + 1)-dimensional generalized Kadomtsev–Petviashvili equation. Comput. Math. Appl. 75(12), 4221–4231 (2018)
Yan, X.W., Tian, S.F., Dong, M.J., Wang, X.B., Zhang, T.T.: Nonlocal symmetries, conservation laws and interaction solutions of the generalised dispersive modified Benjamin–Bona–Mahony equation. Z. Naturforsch. A 73(5), 399–405 (2018)
Tian, S.F., Zhang, H.Q.: Riemann theta functions periodic wave solutions and rational characteristics for the (1 + 1)-dimensional and (2 + 1)-dimensional Ito equation. Chaos Solitons Fractals 47, 27–41 (2013)
Wang, X.B., Tian, S.F., Qin, C.Y., Zhang, T.T.: Characteristics of the solitary waves and rogue waves with interaction phenomena in a generalized (3 + 1)-dimensional Kadomtsev–Petviashvili equation. Appl. Math. Lett. 72, 58–64 (2017)
Tian, S.F., Zhang, H.Q.: Riemann theta functions periodic wave solutions and rational characteristics for the nonlinear equations. J. Math. Anal. Appl. 371, 585–608 (2010)
Tian, S.F.: The mixed coupled nonlinear Schrödinger equation on the half-line via the Fokas method. Proc. R. Soc. Lond. A 472, 20160588 (2016)
Wang, X.B., Tian, S.F., Qin, C.Y., Zhang, T.T.: Dynamics of the breathers, rogue waves and solitary waves in the (2 + 1)-dimensional Ito equation. Appl. Math. Lett. 68, 40–47 (2017)
Tian, S.F.: Initial-boundary value problems for the coupled modified Korteweg–de Vries equation on the interval. Commun. Pure Appl. Anal. 17(3), 923–957 (2018)
Tu, J.M., Tian, S.F., Xu, M.J., Ma, P.L., Zhang, T.T.: On periodic wave solutions with asymptotic behaviors to a (3 + 1)-dimensional generalized B-type Kadomtsev–Petviashvili equation in fluid dynamics. Comput. Math. Appl. 72, 2486–2504 (2016)
Tian, S.F., Wang, Z., Zhang, H.Q.: Some types of solutions and generalized binary Darboux transformation for the mKP equation with self-consistent sources. J. Math. Anal. Appl. 366, 646–662 (2010)
Tian, S.F., Zou, L., Ding, Q., Zhang, H.Q.: Conservation laws, bright matter wave solitons and modulational instability of nonlinear Schrödinger equation with time-dependent nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 17, 3247–3257 (2012)
Feng, L.L., Zhang, T.T.: Breather wave, rogue wave and solitary wave solutions of a coupled nonlinear Schrödinger equation. Appl. Math. Lett. 78, 133–140 (2018)
Dong, M.J., Tian, S.F., Yan, X.W., Zou, L.: Solitary waves, homoclinic breather waves and rogue waves of the (3 + 1)-dimensional Hirota bilinear equation. Comput. Math. Appl. 75(3), 957–964 (2018)
Wang, X.B., Tian, S.F., Zhang, T.T.: Characteristics of the breather and rogue waves in a (2 + 1)-dimensional nonlinear Schrödinger equation. Proc. Am. Math. Soc. 146(8), 3353–3365 (2018)
Tu, J.M., Tian, S.F., Xu, M.J., Zhang, T.T.: Quasi-periodic waves and solitary waves to a generalized KdV–Caudrey–Dodd–Gibbon equation from fluid dynamics. Taiwan. J. Math. 20, 823–848 (2016)
Tian, S.F., Zhang, H.Q.: On the integrability of a generalized variable-coefficient Kadomtsev–Petviashvili equation. J. Phys. A Math. Theor. 45, 055203 (2012). (29pp)
Wang, X.B., Tian, S.F., Zhang, T.T.: Dynamics of the breathers and rogue waves in the higher-order nonlinear Schrödinger equation. Appl. Math. Lett. 86, 298–304 (2018)
Qin, C.Y., Tian, S.F., Zou, L., Ma, W.X.: Solitary wave and quasi-periodic wave solutions to a (3+1)-dimensional generalized Calogero-Bogoyavlenskii-Schiff equation. Adv. Appl. Math. Mech. 10, 948–977 (2018)
Tian, S.F., Zhang, H.Q.: On the integrability of a generalized variable-coefficient forced Korteweg–de Vries equation in fluids. Stud. Appl. Math. 132, 212–246 (2014)
Tian, S.F.: Initial-boundary value problems for the general coupled nonlinear Schrödinger equations on the interval via the Fokas method. J. Differ. Equ. 262, 506–558 (2017)
Acknowledgements
The authors would like to thank the editor and the referees for their valuable comments and suggestions. This work was supported by the Postgraduate Research & Practice Program of Education & Teaching Reform of CUMT under Grant No. YJSJG_2018_036, the “Qinglan Engineering project” of Jiangsu Universities, the National Natural Science Foundation of China under Grant No. 11301527, the Fundamental Research Fund for the Central Universities under the grant No. 2017XKQY101, and the General Financial Grant from the China Postdoctoral Science Foundation under Grant Nos. 2015M57 0498 and 2017T100413.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Communicated by Yong Zhou.
Project supported by the Fundamental Research Fund for the Central Universities under the Grant No. 2017XKQY101.
Rights and permissions
About this article

Cite this article
Feng, LL., Tian, SF. & Zhang, TT. Bäcklund Transformations, Nonlocal Symmetries and Soliton–Cnoidal Interaction Solutions of the (2 + 1)-Dimensional Boussinesq Equation. Bull. Malays. Math. Sci. Soc. 43, 141–155 (2020). https://doi.org/10.1007/s40840-018-0668-z
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40840-018-0668-z
Keywords
- The (2 + 1)-dimensional Boussinesq equation
- Nonlocal symmetry
- Truncated Painlevé expansion
- Soliton–cnoidal wave interaction solution