
Abstract
In this paper, we consider of finding efficient solution and weakly efficient solution for nonconvex vector optimization problems. When X and Y are normed spaces, F is an anti-Lipschitz mapping from X to Y, and the ordering cone is regular, we present an algorithm to guarantee that the generated sequence converges to an efficient solution with respect to normed topology. If the domain of the mapping is compact, we prove that the generated sequence converges to an efficient solution with respect to normed topology without requiring that mapping is anti-Lipschitz. We also give an algorithm to guarantee that the generated sequence converges to a weakly efficient solution with respect to normed topology.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Recently, some numerical methods for solving convex multiobjective optimization problems have been proposed in the following papers: The steepest descent method for multiobjective optimization was dealt with in [1], and an extension of the projective gradient method to the case of convex constrained vector optimization can be found in [2]. Bonnel et al. [3] constructed a vector-valued proximal point algorithm to investigate convex vector optimization problem in Hilbert space, and they generalized the famous Rockafellar’s results [4] from scalar case to vector case. Ceng and Yao generalized Bonnel’s results to approximate case in [5]. Chen and Zhao [6] proposed a generalized proximal point algorithm for convex vector optimization problems in uniformly convex and uniformly smooth Banach spaces. Chen et al. [7] introduced a vector-valued Tikhonov-type regularization algorithm for an extended-valued multiobjective optimization problem, and under some mild conditions, they proved that any sequence generated by the algorithm converges to a weak Pareto optimal solution of the multiobjective optimization problem. Similar study can also be found in [8].
In this paper, we consider of finding efficient solution and weakly efficient solution for nonconvex vector optimization problems. By the method of scalarization, under the condition that mapping is anti-Lipschitz, and the ordering cone is regular, we present an algorithm to guarantee that the generated sequence converges to an efficient solution with respect to normed topology. If the domain of the mapping is compact, we prove that the generated sequence converges to an efficient solution with respect to normed topology without requiring that the mapping is anti-Lipschitz. We also give an algorithm to guarantee that the generated sequence converges to a weakly efficient solution with respect to normed topology.
2 Preliminaries and Definitions
Throughout this paper, let X and Y be real normed linear spaces. Let \(Y^*\) be the topological dual space of Y. Let C be a closed convex pointed cone in Y. The cone C induces a partial ordering in Y defined by
Let
be the dual cone of C. Denote the quasi-interior of \(C^*\) by \(C^\sharp \), i.e.,
Let D be a nonempty subset of Y. The cone hull of D is defined as
Denote the closure of D by cl(D) and the interior of D by intD.
A nonempty convex subset B of the convex cone C is called a base of C if C= cone(B) and 0 \(\not \in \text{ cl }(B)\).
By the separation theorem of convex sets (see [9], Theorem 3.20, Theorem 3.16), we can get the following two lemmas.
Lemma 2.1
If C is a closed convex pointed cone in Y, then \(C^\sharp \not = \emptyset \) if and only if C has a base.
Lemma 2.2
If C is a closed convex pointed cone in Y with int\(C\ne \emptyset \), then \(C^*\backslash \{0\}\ne \emptyset .\)
Let A be a nonempty subset of X, and let F: \(A\rightarrow Y\) be a mapping. We consider the following vector optimization problem (in short (VOP)):
Definition 2.1
A vector \(x_{0}\in A\) is called an efficient solution to the (VOP) if
The set of efficient solutions to the (VOP) is denoted by E(A, F).
Definition 2.2
Let int\(C\not =\emptyset \). A vector \(x_{0}\in A\) is called a weakly efficient solution to the (VOP) if
The set of weakly efficient solutions to the (VOP) is denoted by \(E_{W}(A, F).\)
A set \(D\subset Y\) is said to be bounded from below if there exists some \(y_{0}\in Y\), such that
Definition 2.3
(see [10]) The closed convex pointed cone C is said to be regular if every decreasing sequence which is bounded from below is convergent in norm topology.
Remark 2.1
The spaces \(R^n, c_{0}, l, l^2, L[a, b],\) and \(L{^2}[a, b]\) are Banach spaces, whose positive cones are regular.
Definition 2.4
Let A be a nonempty subset of X. A mapping F: \(A \rightarrow Y\) is said to be anti-Lipschitz, if there exists a real number \(\alpha >0\) such that
Remark 2.2
Let X be a real Hilbert with inner product \(\langle \cdot , \cdot \rangle \) and norm \(\Vert \cdot \Vert \), respectively. Let A be a nonempty subset of X. Let F: \(A\rightarrow X\) be a mapping. If F is strong monotone on A, that is , there exists some \(\beta >0\) such that
then, by Schwarz inequality, we have
Thus, we have
From this, we can see that if X is a real Hilbert space, A is a nonempty subset of X, and F: \(A\rightarrow X\) is strong monotone on A, then F is anti-Lipschitz.
3 Algorithm
In this section, let C be a closed convex pointed cone in Y, A be a nonempty subset of X, and F: \(A\rightarrow Y\) be a mapping. Assume that F(A) is bounded from below.
The first algorithm (to be called A1 ) is given as follows.
Let C have a base, and let \(f\in C^\sharp \) (see Lemma 2.1). The method generates a sequence \(\{x_{n}\}\subset X\) in the following way:
-
Initialization: Choose \(x_{1} \in A.\)
-
Stopping rule: Given \(x_{n}\in A\), if \(x_{n}\in E(A,F)\), then \(x_{n+p}=x_{n}\) for all \(p\ge 1.\)
-
Iterative step: Given \(x_{n}\in A\), if \(x_{n}\not \in E(A, F)\), then take as the next iterate any \(x_{n+1} \in A\) such that
and
The second algorithm ( to be called A2 ) is given as follows.
Let int\(C\ne \emptyset \), and let \(f\in C^*\backslash \{0\}\) (see Lemma 2.2). The method generates a sequence \(\{x_{n}\}\subset X\) in the following way:
-
Initialization: Choose \(x_{1} \in A.\)
-
Stopping rule: Given \(x_{n}\in A\), if \(x_{n}\in E_{W}(A,F)\), then \(x_{n+p}=x_{n}\) for all \(p\ge 1.\)
-
Iterative step: Given \(x_{n}\in A\), if \(x_{n}\not \in E_{W}(A, F)\), then take as the next iterate any \(x_{n+1} \in A\) such that
and
Under some conditions, we will prove that the generated sequence converges to an efficient solution.
Theorem 3.1
Let X and Y be real normed linear spaces, and C be a closed convex pointed cone in Y. Let A be a nonempty subset of X, and let F: \(A \rightarrow Y\) be a mapping. Assume that the following conditions are satisfied:
-
(i)
C has a base, and C is regular;
-
(ii)
F(A) is closed and bounded from below;
-
(iii)
F is an anti-Lipschitz mapping.
Then, any sequence \(\{x_{n}\}\) generated by algorithm A1 converges to an efficient solution of the (VOP) with respect to norm topology.
Proof
By assumption, C has a base, in view of Lemma 2.1, \(C^\sharp \not = \emptyset \). Let \( f \in C^\sharp \). Given \(x_{1}\in A\), if \(x_{1}\in E(A, F)\), then \(x_{1+p}=x_{1}\) for all \(p\ge 1\).
If \(x_{1}\not \in E(A, F)\). Since F(A) is bounded from below, there exists some \(y_{0}\in Y\) such that
By \(f\in C^\sharp \), we have
Thus, inf\(\{f(y){:} y\in (F(x_{1})-C)\cap F(A)\}\) is a real number. By the definition of infimum, there exists \(x_{2}\in A\) such that
and
So, we can obtain the conclusion through finite iterations to get some \(x_{n}\) such that \(x_{n}\in E(A, F)\) , by picking \(x_{n+p}=x_{n}\) for all \(p\ge 1\), or else we can get a sequence \(\{F(x_{n})\}\) with \(x_{n} \in A\) such that
and
Since C is regular, \(\{F(x_{n})\}\) converges to some \({\bar{y}}\in Y\) in norm. As F(A) is closed, we have \({\bar{y}}\in F(A)\). Thus, there exists some \({\bar{x}}\in A\) such that \({\bar{y}}=F({\bar{x}})\). So
Now we claim that \({\bar{x}}\in E(A, F)\). If not, then there exists some \(\acute{x}\in A\) such that
Since \(f\in C^\sharp \), we have
Noting that \(\{F(x_{n})\}\) is a decreasing sequence, for any fixed n, when \(m\ge n\), we have that
Taking the limit on the both sides of (3.11), let \(m\rightarrow \infty \), by (3.8) and by the closedness of C, we get
Thus,
By (3.12), for each n, there exists \(c_{n}\in C\) such that
This together with (3.9), we have
From (3.7), we have
Taking limit on the both sides of (3.13), by the continuity of f, we get
It contradicts (3.10). Thus, \({\bar{x}}\in E(A, F).\)
Now, we show that \(\{x_n\}\) converges to \({\bar{x}}\) with respect to norm topology. If not, then there exist some \(\varepsilon _0>0\) and a subsequence \(\{x_{n_{k}}\}\) of \(\{x_n\}\) such that
By assumption, there exists some \(\alpha >0\) such that
This together with (3.14), for all k, we have
This contradicts (3.8). The proof is completed. \(\square \)
Theorem 3.2
Let X and Y be real normed linear spaces, and C be a closed convex pointed cone in Y with int\(C\ne \emptyset \). Let A be a nonempty subset of X, and let F: \(A \rightarrow Y\) be a mapping. Assume that the following conditions are satisfied:
-
(i)
C is regular;
-
(ii)
F(A) is closed and bounded from below;
-
(iii)
F is an anti-Lipschitz mapping.
Then, any sequence \(\{x_{n}\}\) generated by algorithm A2 converges to a weakly efficient solution of the (VOP) with respect to norm topology.
Proof
Since int\(C\ne \emptyset \), by Lemma 2.2, \(C^*\backslash \{0\}\ne \emptyset .\) Let \( f \in C^*\backslash \{0\} \). Given \(x_{1}\in A\), if \(x_{1}\in E_{W}(A, F)\), then \(x_{1+p}=x_{1}\) for all \(p\ge 1\). Let \(x_{1}\not \in E_{W}(A, F)\). Since F(A) is bounded from below, there exists some \(y_{0}\in Y\) such that
By \(f\in C^*\backslash \{0\}\), we have that
Since \(x_{1}\not \in E_{W}(A, F)\),
This together with (3.15), we know that
is a real number. By the definition of infimum, there exists \(x_{2}\in A\) such that
and
So, we can obtain the conclusion through finite iterations to get some \(x_{n}\) such that \(x_{n}\in E_{W}(A, F)\) , and by picking \(x_{n+p}=x_{n}\) for all \(p\ge 1\), or else we can get a sequence \(\{F(x_{n})\}\) by induction with \(x_{n+1} \in A\) such that
and
Since C is regular, \(\{F(x_{n})\}\) converges to some \({\bar{y}}\in Y\) in norm. As F(A) is closed, we have \({\bar{y}}\in F(A)\). Thus, there exists some \({\bar{x}}\in A\) such that \({\bar{y}}=F({\bar{x}})\). So
Now we claim that \({\bar{x}}\in E_{W}(A, F)\).
If not, then there exists some \(\acute{x}\in A\) such that
This together with \(f\in C^*\backslash \{0\}\), we have
Noting that \(\{F(x_{n})\}\) is a decreasing sequence, for any fixed n, when \(m\ge n\), we have that
Taking the limit on the both sides of (3.21), let \(m\rightarrow \infty \), by (3.18) and by the closedness of C, we get
Thus,
By (3.22), for each n, there exists \(c_{n}\in C\) such that
This together with (3.19), we have
From (3.17), we have
Taking limit on the both sides of (3.23), by the continuity of f, we get
It contradicts (3.20). Thus \({\bar{x}}\in E_{W}(A, F).\)
In a fashion similar to Theorem 3.1, we can see that \(\lim \nolimits _{n\rightarrow \infty }x_n= {\bar{x}}.\) The proof is completed. \(\square \)
Theorem 3.3
Let X and Y be real normed linear spaces, and C be a closed convex pointed cone in Y. Let A be a nonempty subset of X, and let F: \(A \rightarrow Y\) be a mapping. Assume that the following conditions are satisfied:
-
(i)
A is a nonempty compact subset of X;
-
(ii)
C has a base, and C is regular;
-
(iii)
F is continuous on A, and F(A) is bounded from below;
-
(iv)
F is injective.
Then, any sequence \(\{x_{n}\}\) generated by algorithm A1 converges to an efficient solution of the (VOP) with respect to norm topology.
Proof
Let \(f \in C^\sharp \). By assumption, we can see that F(A) is closed. In a fashion similar to Theorem 3.1, we can obtain the conclusion through finite iterations to get some \(x_{n}\) such that \(x_{n}\in E(A, F)\) , and by picking \(x_{n+p}=x_{n}\) for all \(p\ge 1\), or else we can get a sequence \(\{F(x_{n})\}\) by induction with \(x_{n+1} \in A\) such that
and
and there exists some \({\bar{x}}\in E(A, F)\) such that \(\lim \nolimits _{n\rightarrow \infty }F(x_{n})=F({\bar{x}}).\) Now, we show that \(x_{n}\rightarrow {\bar{x}}.\) We pick any subsequence \(\{x_{n_{k}}\}\) of \(\{x_{n}\}\). By the compactness of A, there exists a subsequence \(\{x_{n_{k_{j}}}\}\) of \(\{x_{n_{k}}\}\), \(\{x_{n_{k_{j}}}\}\) converges to some \(\grave{x}\in A\). By the continuity of F, we have \(\lim \nolimits _{j\rightarrow \infty }F(x_{n_{k_{j}}})=F(\grave{x})\). Since \(\lim \nolimits _{j\rightarrow \infty }F(x_{n_{k_{j}}})=F({\bar{x}})\), we have \(F(\grave{x})=F({\bar{x}}).\) As F is injective, we have \(\grave{x}={\bar{x}}.\) Thus, for any subsequence \(\{x_{n_{k}}\}\) of \(\{x_{n}\}\), there exists a subsequence \(\{x_{n_{k_{j}}}\}\) of \(\{x_{n_{k}}\},\) \(\{x_{n_{k_{j}}}\}\) converges to same \({\bar{x}}\in A\). We can see that \(\{x_{n}\}\) converges to \({\bar{x}}\). The proof is completed. \(\square \)
Similar to the proof of Theorem 3.2 and Theorem 3.3, we can get the following theorem.
Theorem 3.4
Let X and Y be real normed linear spaces, C be a closed convex pointed cone in Y with int\(C\ne \emptyset \). Let A be a nonempty subset of X, and let F: \(A \rightarrow Y\) be a mapping. Assume that the following conditions are satisfied:
-
(i)
A is a nonempty compact subset of X;
-
(ii)
C is regular;
-
(iii)
F is continuous on A, and F(A) is bounded from below;
-
(iv)
F is injective.
Then, any sequence \(\{x_{n}\}\) generated by algorithm A2 converges to a weakly efficient solution of the (VOP) with respect to norm topology.
Now, we give two examples illustrating Theorem 3.1 and Theorem 3.2.
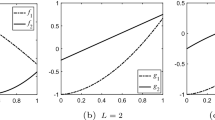
Example 3.1
Let
Let F: \( A\rightarrow R^2\) be defined by
It is clear that F is not convex.
By the mean value theorem, for any \(x, y \in A\) with \(x< y\), there exist \(\xi \in (x, y)\) and \(\eta \in (x, y)\) such that
It is clear the conditions of Theorem 3.1 and Theorem 3.2 are satisfied.
Example 3.2
Let
and let \(a_1, a_2,\ldots , a_n \) be positive real numbers. Let F: \( R^n\rightarrow R^n\) be defined by
We have
where \(\beta = \text{ min }\{a_1, a_2, \ldots , a_n\}\). This means that F: \(A \rightarrow Y\) is anti-Lipschitz. It is easy to see that \(F(A_1)\) is closed and bounded, and so is compact. We can also see that \(F(A)= F(A_1)+ R_{+}^n\). Since \(F(A_1)\) is compact and \(R_{+}^n\) is closed, F(A) is closed. It follows from int\(C\ne \emptyset \) and \(F(A_1)\) is bounded that F(A) is bounded from below. Thus, the conditions of Theorem 3.1 and Theorem 3.2 are satisfied.
References
Fliege, J., Svaiter, B.F.: Steepest descent methods for multicriteria optimization. Math. Methods Oper. Res. 51, 479–494 (2000)
Drummond, L.M.G., Iusem, A.N.: A projected gradient method for vector optimization problems. Comput. Optim. Appl. 28, 5–30 (2004)
Bonnel, H., Iusem, A.N., Svaiter, B.F.: Proximal methods in vector optimization. SIAM J. Optim. 15, 953–970 (2005)
Rockafellar, R.T.: Monotone operators and the proximal point algorithm. SIAM J. Control Optim. 14, 877–898 (1976)
Ceng, L.C., Yao, J.C.: Approximate proximal methods in vector optimization. Euro. J. Oper. Res. 183(1), 1–19 (2007)
Chen, Z., Zhao, K.: A proximal-type method for convex vector optimization problem in Banach spaces. Numer. Funct. Anal. Optim. 30, 1–12 (2009)
Chen, Z., Xiang, C.H., Zhao, K.Q., Liu, X.W.: Convergence analysis of Tikhonov-type regularization algorithms for multiobjective optimization problems. Appl. Math. Comput. 211, 167–172 (2009)
Jayswal, A., Choudhury, S.: An exact \(l_1\) exponential penalty function method for multiobjective optimization problems with exponential-type invexity. J. Oper. Res. Soc. Chin. 2, 75–91 (2014)
Jahn, J.: Mathematical Vector Optimization in Partially-Ordered Linear Spaces. Peter Lang, Frankfurt an Main (1986)
Deimling, K.: Nonlinear Functional Analysis. Springer-Verlag, Berlin (1988)
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Anton Abdulbasah Kamil.
This research was partially supported by the National Natural Science Foundation of China (11061023, 11201216, 11471291).
Rights and permissions
About this article

Cite this article
Gong, XH., Liu, F. An Algorithm for Vector Optimization Problems. Bull. Malays. Math. Sci. Soc. 40, 919–929 (2017). https://doi.org/10.1007/s40840-017-0455-2
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40840-017-0455-2