
Abstract
In this paper, a classical of virus dynamics model with intracellular delay and humoral immunity is introduced. By using suitable Lyapunov functionals and the Lasalle invariant principle, the global stability of the equilibria is proved. Numerical simulations are presented to illustrate our results. The effect of delay and humoral immunity is also discussed.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The purpose of this paper is to study the following delay virus dynamics model:
where x(t) denotes the concentration of the un-infected target cells, y(t) denotes the concentration of infected cells, v(t) denotes the concentration of free virus particles, z(t) denotes the density of the pathogens-specific lymphocytes. Un-infected cells are produced at a constant rate \(\lambda \) and die at rate dx(t). Free virus infects un-infected cells to produce infected cells at rate \(\frac{\beta x(t)v(t)}{1+\alpha v(t)}\). Infected cells die at rate ay(t). New virus is produced from infected cells at rate ky(t) and dies at rate uv(t). The pathogens are removed at rate pz(t) by the immune system. The pathogens-specific lymphocytes proliferate at rate qv(t) in contact with the pathogens, and die at rate b . The average life-time of un-infected cells, infected cells, free virus and pathogens-specific lymphocytes are given by \(1/d,1/a,1/\mu ,1/b\) , respectively. The average number of virus particles produced over the life-time of a single infected cell is given by k / a. The parameter \(\tau \) accounts for the time between viral entry into a target cell and the production of new virus particles. The recruitment of virus producing cells at time t is given by the number of cells that were newly infected at time \(t-\tau \) and are still alive at time t. Here, m is assumed to be a constant death rate for infected but not yet virus-producing cells. Thus, the probability of surviving the time period from \(t-\tau \) to t is \( e^{-m\tau }\).
When \(\tau =0,\) (1.1) reduces to the following simple four-dimensional model:
it has been studied in [1].
For the healthy cell infected with a virus and the virus reproduction cell, there is an intracellular time delay between infection of a cell and production of new virus particles called the latent period (see [2–5]). The delay describes the finite time interval from the time when the infectious virus binds to the receptor of a target cell to the time when the first virion is produced from the same target cell [2]. In reality, there is a time delay between initial viral entry into a cell and subsequent viral production. There has been much work on the effect of intracellular delay accounting for the time between viral entry into a target cell and the production of new virus particles (see [6–13]). Humoral immunity is the aspect of immunity that is mediated by secreted antibodies. In malaria infection the humoral immunity is more effective than cell-mediated immunity [14]. Murase and Kajiwara [12] and Huo et al. [1] consider the effect of the humoral immunity. Many authors have studied the virus model (see [15, 16]) . In this paper, we incorporate the delay and the humoral immunity and study the global stability of equilibria of (1.1).
The organization of this paper is as follows. In Sect. 2, the positivity and boundedness of solutions of the system (1.1) are presented. The stability analysis for the three equilibria are given in Sect. 3, and some numerical simulations are given in Sect. 4. Finally, a brief discussion of effect of the humoral immunity and the intracellular delay are given in Sect. 5.
2 Positivity and Boundedness of Solutions
The initial conditions of (1.1) are given as
where \(\left( \varphi _1(\theta ),\varphi _2(\theta ),\varphi _3(\theta ),\varphi _4(\theta )\right) \in C\left( [-\tau ,0],R_{+0}^4\right) ,\) the Banach space of continuous functions mapping the interval \([-\tau ,0]\) into \( R_{+0}^4,\) where \(R_{+0}^4=\left\{ \left( x_1,x_2,x_3,x_4\right) :x_i\ge 0,i=1,2,3,4\right\} .\) By the fundamental theory of FDEs [17], we know that there is a unique solution (x(t), y(t), v(t), z(t)) of (1.1) with initial condition (2.1).
The following theorem establishes the positivity and boundedness of solutions of (1.1).
Theorem 1
Let (x(t), y(t), v(t), z(t)) be any solution of system (1.1) satisfying initial condition (2.1). Then x(t), y(t), v(t) and z(t) are all positivity and bounded for all \(t\ge 0\).
Proof
Note that from (1.1), we have
Positivity immediately follows from the above integral forms and initial condition (2.1).
For boundedness of the solution, we define
and \(\gamma =\mathrm{min}\{d,\frac{a}{2},u,{b}\}.\) By positivity of the solution, it follows that
This implies that G(t) is bounded, and so are x(t), y(t), v(t) and z(t). This completes the proof of the theorem.\(\square \)
3 Equilibria and Global Asymptotically Stability Analysis
From system (1.1), we know that the un-infected steady state is \( E_0=(x_0,0,0,0)=(\frac{\lambda }{d},0,0,0)\). The basic reproduction number is \( R_0=\frac{k\lambda \beta e^{-m\tau }}{adu}\). When \(R_0>1,\) there is only one un-immune infected steady state \(E_1=(x_1,y_1,v_1,0)\) defined by
The immune response reproductive ratio is \(R_1=\frac{qk\lambda \beta e^{-m\tau }}{au(dq+\alpha bd+\beta b)}\). We will know that if \(R_1>1\), there is only one positive equilibrium point \(E_2=(x_2,y_2,v_2,z_2),\) where
Theorem 2
-
(i)
The un-infected steady state \(E_0\) is globally asymptotically stable, if \(R_0<1\);
-
(ii)
The un-immune infected steady state \(E_1\) is globally asymptotically stable, if \(R_0>1,R_1<1\);
-
(iii)
The immune infected steady state \(E_2\) is globally asymptotically stable, if \(R_1>1\).
Proof
(i) Define a Lyapunov function \(V_{00}(t)\) as follows:
where \(x_0=\frac{\lambda }{d}.\)
Calculating the time derivative of \(V_{00}(t)\) along the positive solution of model (1.1), we obtain
Define \(V_{0}=V_{00}+\beta \int _{t-\tau }^{t}{\frac{x(s)v(s)}{1+\alpha v(s)} ds}\),
Since, \(R_0<1\), it follows from LaSalle invariance principle [18, 19] that the uninfected steady state \(E_0\) is globally asymptotically stable, if \(R_0<1\).
(ii) Define a Lyapunov functional \(V_{11}(t)\) as follows:
Calculating the time derivative of \(V_{11}(t)\) along the positive solution of model (1.1), we obtain
Since \(E_1\) is a equilibrium point of (1.1), we have
Therefore,
Define,
Therefore,
Since the function \(h(i)=1-i+ln\;i\;(i>0), h^{\prime }(i)=-1+\frac{1}{i}, h^{{ ^{\prime }}{^{\prime }}}(i)=-\frac{1}{i^2}<0\), so \(h(i)\le 0\) and only \(i=1\) , \(h(i)=0\). It is clear that
It follows from LaSalle invariance principle [18, 19] that the un-immune infected steady state \(E_1\) is globally asymptotically stable if \(R_0>1,R_1<1 \).\(\square \)
(iii) Define a Lyapunov functional \(V_{22}(t)\) as follows:
Calculating the time derivative of \(V_{22}(t)\) along the positive solution of model (1.1), we obtain
Since \(E_2\) is a equilibrium point of (1.1), we have
Therefore,
Define,
Therefore,
It follows from LaSalle invariance principle [18, 19] that the immune infected steady state \(E_2\) is globally asymptotically stable, if \(R_1>1\). This completes the proof of the theorem.
4 Numerical Simulations
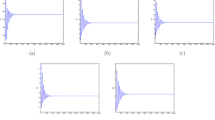
In this section, some numerical simulations of system (1.1) are presented for supporting our analytic results. Based on biological meanings of virus dynamics model from papers [5, 8, 10, 11, 16], we have estimated the values of our model parameters as follows: \(\lambda =0.9,d=0.2, \beta =0.3\), \(\alpha =0.2,a=0.3,k=0.5\), \(u =0.1,p=0.05,q=0.2, b=0.3.\;m=0.3\), \(\tau =15.\) It is obvious that the parameters satisfy (i) of Theorem 2. Then \(E_0\) is globally asymptotically stable (see Fig. 1).

When \(\tau =15\), \(R_0<1\), the un-infection steady state \(E_{0}\) is globally asymptotically stable
Secondly, we assume that \(\lambda =0.9,d=0.2,\beta =0.3\), \(\alpha =0.2, a=0.3,k=0.5,u=0.1\), \(p=0.05,q=0.2, b=0.3.\; m=0.3\), \( \tau =7.\) It is obvious that the parameters satisfy (ii) of Theorem 2. Then \(E_1\) is globally asymptotically stable (see Fig. 2).

When \(\tau =7\), \(R_0>1,R_1<1\), the un-immune infected equilibrium \( E_{1}\) is globally asymptotically stable
Finally, we assume that \(\lambda =0.9, d=0.2\), \(\beta =0.3, \alpha =0.2, a=0.3\), \(k=0.5, u=0.1, p=0.05\), \(q=0.2, b=0.3.\; m=0.3, \tau =5.\) It is obvious that the parameters satisfy (iii) of Theorem 2. Then \(E_2\) is globally asymptotically stable (see Fig. 3).

When \(\tau =5\), \(R_1>1\), the immune infected equilibrium \(E_{2}\) is globally asymptotically stable
5 Discussion
In this paper, we consider a delay mathematical model with saturation infection and humoral immunity. The global stability of the three equilibria of system (1.1) have been completely established by using suitable Lyapunov functionals and the Lasalle invariant principle. By the (i) of Theorem 2, we see that if \(R_0<1\), the un-infection steady state \(E_0\) is globally asymptotically stable, in this case, the virus is cleared up. By the (ii) of Theorem 2, we see that if \(R_0>1,R_1<1\), the un-immune infected equilibrium \(E_1\) is globally asymptotically stable. By the (iii) of Theorem 2, we see that if \(R_1>1\), the immune infected equilibrium \( E_2\) is globally asymptotically stable. We know that the global dynamical properties of the model (1.1) depend on the basic reproductive ratio.

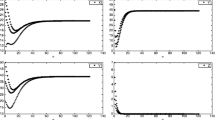
a \(R_0\) is a decreasing function on time delay \(\tau \), b \(R_1\) is a decreasing function on time delay \(\tau \)
The reproductive ratio plays a crucial role for virus infection dynamics. Actually, in model (1.1), the basic reproductive ratio \(R_0\) is a decreasing function on time delay \(\tau \) (see Fig. 4a), the \(R_1\) is also decreasing function on time delay \(\tau \) (see Fig. 4b). When all other parameters are fixed and delay \(\tau \) is sufficiently large, \(R_0\) becomes to be less than one, which makes the un-infection steady state \(E_0\) globally asymptotically stable. The humoral immune does help reduce the virus load and increase the healthy cell population. This can be seen by comparing the virus load components and the healthy cell population components in the un-immune infected equilibrium \(E_1=(x_1,y_1,v_1,0)\) and the immune infected equilibrium \(E_2=(x_2,y_2,v_2,z_2)\). when \(R_1>1\), simple calculations show that:
and
By biological meanings, intracellular delay plays a positive role in virus infection process in order to eliminate virus. Sufficiently large intracellular delay makes the virus development slower and the virus has been controlled and disappeared. So this gives us some suggestions on new drugs to prolong the time of infected cells producing virus and to control the load of virus.
References
Huo, F.H., Tang, Y.L., Feng, L.X.: A virus dynamics model with saturation infection and humoral immunity. Int. J. Math. Anal. 6, 1977–1983 (2012)
Huang, G., Takeuchi, Y., Ma, W.: Lyapunov functionals for delay differntial equations model of viral infections. SIAM J. Appl. Math. 70, 2693–2708 (2010)
Herz, V., Bonhoeffer, S., Anderson, R., May, R.M., Nowak, M.A.: Viral dynamics in vivo: limitations on estimations on intracellular delay and virus delay. Proc. Natl. Acad. Sci. USA 93, 7247–7251 (1996)
Mittler, J., Sulzer, B., Neumann, A., Perelson, A.: Influence of delayed virus production on viral dynamics in HIV-1 infected patients. Math. Biosci. 152, 143–163 (1998)
Nelson, P., Murray, J., Perelson, A.: A model of HIV-1 pathogenesis that includes an intracellular delay. Math. Biosci. 163, 201–215 (2000)
Reddy, B., Yin, J.: Quantitative intracellular kinetics of HIV type 1. AIDS Res. Hum. Retrovir. 15, 273–283 (1999)
Culshaw, R.V., Ruan, S., Webb, G.: A mathematical model of cell-to-cell HIV-1 that include a time delay. J. Math. Biol. 46, 425–444 (2003)
Nelson, P.W., Perelson, A.S.: Mathematical analysis of delay differential equation models of HIV-1 infection. Math. Biosci. 179, 73–94 (2002)
Wang, K., Wang, W., Pang, H., Liu, X.: Complex dynamic behavior in a viral model with delayed immune response. Phys. D 226, 197–208 (2007)
Wang, L., Xu, R.: Mathematical analysis of an improved hepatitis B virus model. Int. J. Biomath. 1250006, 18 (2012)
Xu, R.: Global stability of an HIV-1 infection model with saturation infection and intracellular delay. J. Math. Anal. Appl. 375, 75–81 (2011)
Murase, A., Sasaki, T.: Stability analysis of pathogen–immune interaction dynamics. J. Math. Biol. 51, 247–267 (2005)
Li, Y., Xu, R., Li, Z., et al.: Global dynamics of a delayed HIV-1 infection model with CTL immune response. Discret. Dyn. Nat. Soc. 673843, 13 (2011)
Deans, J.A., Cohen, S.: Immunology of malaria. Ann. Rev. Microbiol. 37, 25–49 (1983)
Wang, L., Xu, R.: Mathematical Analysis of an Improved Hepatitis B Virus Model. Int. J. Biomath. 5, 1250006(18 pages) (2012)
Ma, S., Wang, X., Lei, J., Feng, Z.: Dynamics of the delay hematological cell model. Int. J. Biomath. 3, 105–125 (2010)
Hale, J., Verduyn Lunel, S.M.: Introduction to Functional Differential Equations, Applied Mathematical Sciences, vol. 99. Springer, New York (1993)
Lasalle, J.P.: The stability of Dynamical Systems. Regional Conference Series in Applied Mathematics. SIAM, Philadelphia (1976)
Lasalle, J.P.: Stability theory for ordinary differential equations. J. Differ. Equ. 41, 57–65 (1968)
Acknowledgments
This work was partially supported by the NNSF of China(11461041), the NSF of Gansu Province of China (148RJZA024) and the Development Program for HongLiu Distinguished Young Scholars in Lanzhou University of Technology.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Ataharul M. Islam.
Rights and permissions
About this article

Cite this article
Xiang, H., Tang, YL. & Huo, HF. A Viral Model with Intracellular Delay and Humoral Immunity. Bull. Malays. Math. Sci. Soc. 40, 1011–1023 (2017). https://doi.org/10.1007/s40840-016-0326-2
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40840-016-0326-2