
Abstract
Unmanned Aerial Vehicles (UAVs) have become important in an extensive range of fields such as surveillance, environmental monitoring, agriculture, infrastructure inspection, commercial applications, and many others. Ensuring stable flight and precise control of UAVs, especially in adverse weather conditions or turbulent environments, presents significant challenges. Developing control systems that can adapt to these environmental factors while ensuring safe and reliable operation is a main motivation. Considering the challenges, first, an adaptive model is identified using the input/output data sets. New adaptation laws are obtained for dynamic parameters. Then, a Type-3 (T3) Fuzzy Logic System (FLS) is used to compensate for the error of dynamic identification. T3-FLS is tuned by a sliding mode control (SMC) strategy. The robustness is analyzed considering the adaptation error using the SMC approach. The main idea is that the basic dynamics of UAVs are taken into account, and adaptation laws are designed to enhance the modeling accuracy. On the other hand, an optimized T3-FLS with SMC is introduced to eliminate the adaption errors and ensure robustness. Several simulations show that known parameters converge under uncertainty, and the stability is kept, well. Also, output signals follow the desired trajectories under dynamic perturbations, identification errors, and uncertainties.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Robotic science is a modern technology that surpasses the constraints of traditional engineering. A comprehensive understanding of robots and their applications necessitates expertise in electrical engineering, mechanical engineering, system engineering, industrial engineering, computer science, and mathematics. One of the specific robotic systems is UAV. UAVs have become increasingly important in a wide range of fields such as surveillance and reconnaissance, environmental monitoring, gathering information in areas that are difficult to access, locating and assisting individuals in distress, agriculture, irrigation management, infrastructure inspection, film and photography, and numerous commercial applications [1, 2]. In general, it can be said that UAVs have attracted a lot of attention in recent decades. The main advantages of UAVs compared to conventional helicopters are:
-
Flying robots are easier to design and build than helicopters. Also, it does not require a mechanical connection to change the inclination of the blades.
-
Having four smaller rotors than the single rotor of a conventional helicopter allows it to have less kinetic energy and less damage in case of an accidental fall.
-
It has a symmetrical structure, and considering that the movement of UAVs is only dependent on the rotation rate, it makes them maneuverable and requires simpler control systems.
UAVs consist of active control systems with 6 degrees of freedom and four independent controllers. They are devices with four rotors, whose translational and rotational movements are created by changes in the speed of the rotors [3]. To control UAVs, the following three features should be considered:
-
Variable modes with time-delay.
-
Dynamics with uncertainty.
-
Multi-input-multi-output and nonlinear structure.
Studying the stability and control of UAVs concerning nonlinear components and disturbances is a challenging problem. Typically, UAVs can be maneuvered using a remote control system and stabilized with an external controller. Attitude control is employed to maintain the optimal position of UAVs. Various control methods, including linear control, non-linear, adaptive, fuzzy, and neural controllers, have been utilized to control the attitude of UAVs. However, controlling UAVs becomes challenging in the presence of uncertainties [4,5,6].
Literature review
In [7], an adaptive controller is suggested to track the position of the UAV under uncertainty and disturbance. The stability analysis is done using the concept of the Lyapunov scheme. In [8], a control method based on adaptive control and SMC is used to combine the tracking error with the concept of Lyapunov stability. In [9], a tensor transformation model based on SMC is presented. The provided controller is divided into two stages, in the first step, a transformation model is provided, and then, in the second step, the final SMC rule for the time-varying conditions is presented. In [10], a control structure is designed by the feedback linearization approach. The feedback linearization transforms the UAV dynamics into a simple fourth-order linear system, and then SMC is designed. In [11], a hybrid three-axis state control is presented, so that the time-limited SMC is designed to control the three-axis angular rate in the inner loop. Then, a PI based on the linear square regulator is considered to control the rotation angles in the outer ring. In [12], some controllers like fuzzy control, feedback linearization, and SMC have been used for the UAV. In [13], two control methods for the UAV are presented. The first method is designed using PID and the second method is designed on the basis of feedback of nonlinear state and linear matrix inequality. In [14], the dynamic UAV is obtained based on physical laws, then a control method is designed based on the backward design method for the stability of UAV under actuator and sensor errors.
The SMC is known as an effective method for designing a robust controller for high-order systems with uncertainties [15]. The main feature of SMC is less sensitivity to perturbations and changes in system parameters. As a practical example, in [16], an adaptive nonlinear SMC is designed for a robot arm in the presence of uncertainty and disturbance. Also, to demonstrate the effectiveness of the suggested approach, a practical examination is carried out on an inverted pendulum. The paths of the system by the suggested SMC reach to the equilibrium point in a limited time.
The FLSs have good applicability in the control of robotic systems. In some studies, the application of FLSs has been investigated. For instance, a new application of UAVs is introduced in [17] to improve road maintenance on partially erased sidewalk edges. It develops the stabilization and computer vision-based decision-making systems using FLSs. A controller using FLS is implemented in [18] to create a control model in a stable environment, comparing it to conventional control methods. The FLS-based controller approach allows the robot to move easily and efficiently in the test environment, minimizing energy consumption and operating in a flexible scheme. It is shown that the FLS-based controller is faster and more accurate than the traditional methods. An adaptive control scheme using FLSs with Jordan feedback structure is suggested in [19] to address the challenges of operating UAVs in extreme environments. It is shown the FLS strategy can effectively manage system uncertainty and track the reference trajectory with good accuracy, low computational load, and quick convergence rate. The controller’s stability is demonstrated using Lyapunov’s method. In [20], a fractional-order PID using FLSs is studied for stabilizing a UAV considering the nonlinear dynamics. FLSs are used to adjust parameters under disturbances and uncertainties. The multi-objective thermal optimization is employed to determine controller parameters to minimize control energy and tracking errors. A new quadcopter UAV platform is introduced in [21], and a type-2 (T2) FLS-based controller is designed to improve control robustness and manage computation costs for practical control. The designed system is used to control a UAV and is tested using a software-in-the-loop simulator and actual flight experiments. In [22], some controllers and modeling methods are reviewed and compared. In [23], a fuzzy PID is designed for a line following problem. The controller’s gains are chosen online based on changes in position and orientation errors. The results verify that the type-2 FLS-based controller outperforms the convectional fuzzy and PID controllers in stabilization and time-variant trajectory tests.
Recently, type-3 FLSs are widely used for many problems such as: robotic [24, 25], monitoring [26], forecasting [27], electrical vehicles [28, 29], adaptive control systems [30], classification [26], modeling [31], and many others. However, T3-FLS-based control of UAVs has not been studied, well. The literature review shows that:
-
In most controllers, the dynamics of UAVs are considered to be known.
-
In a few studies, FLS-based controllers have been developed, but the robustness analyses are neglected.
-
In a few SMCs, the robustness is studied, but, the dynamic parameters of UAV are considered constant.
-
T3-FLSs based control of UAVs has not been studied, well.
In this paper, a T3-FLS-based controller is developed. The main novelties and contributions are:
-
An adaptive scheme is developed for model identification using the input/output data sets.
-
New adaptation laws are obtained for dynamic parameters.
-
A T3-FLS is developed to compensate for the identification errors.
-
The robustness is analyzed considering the adaptation errors

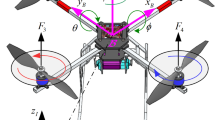
Schematic of a UAV with four rotors
Dynamic modeling
In this research, a UAV with four rotors as shown in Fig. 1 is considered. This UAV consists of a rigid and cross-shaped frame with four propellers. The considered UAV can be moved in certain directions by increasing/reduction of the total propulsion force. If the speed of all four propellers increases or decreases at the same time, vertical movement is created. The rotational movement around the longitudinal axis and the related translational movement are created by increasing and decreasing the speed of propellers one and three in reverse. If the speed of propellers two and four is changed inversely, the rotational movement around the transverse axis and also the translational movement related to it are formed. Finally, the rotational movement around the height axis is made from the torque difference between the two pairs of propellers (1, 3) and (2, 4) [32]. In this research, the following assumptions have been considered:
-
The structure and propellers are rigid and symmetrical.
-
Thrust forces have a proportionality to the square of the rotation speed of the blades.
Based on the above assumptions, the dynamic equations of the aerodynamic forces created by the rotation of the propellers are written as follows based on Newton–Euler equations [33]:
while m denotes the total mass of the UAV, \(\xi \) is the center of the UAV relative to the inertial frame and a fixed and positive-definite inertial matrix of the UAV is symmetrical to the rigid body. J is defined as follows:
where \({{\textrm{I}}_\chi },\,{{\textrm{I}}_y},\,{{\textrm{I}}_z}\) represent the inertias related to the \(\chi ,\,y,\,z\) axes. \(\Phi \) shows the angular velocities:
While \(\varphi \), \(\Theta \), and \(\Omega \), denote the angles around the longitudinal, transverse, and height axis, respectively. \({F_f}\) is written as:
where \({F_i} = {K_p}{w_i}^2\) and \(K_p\) is related to the force and \(w_i\) denotes the angular speed of the rotor. The \(F_d\) represents the result of the forces produced along the axes \(\chi ,y,z\):
where \({K_{fdz}},{K_{fdy}},{K_{fdx}}\) are the positive coefficients, respectively. Gravitational force \(F_g\) is shown as follows:
where \({\rho _f}\) shows the moment of inertia related to the fixed object:
where d denotes the distance between the center and propellers, and \(C_d\) is a coefficient. The torque \({\rho _a}\) is written as:
where \({K_{faz}},{K_{fay}},{K_{fax}}\) are aerodynamic friction coefficients. \({\rho _g}\) means the result of torques created due to the gyroscopic effect:
where \(J_r\) denotes the inertia of rotor. The relationship between the controllers and the velocities is:
where \(u_i\), \(i=1,...,4\) are control inputs. The velocities \({w_i}\,\,(i = 1,\,...,\,4)\) can be written as follows:
As a result, the dynamic of UAV is determined as:
where \({\bar{\Phi }} = {w_1} - {w_2} + {w_3} - {w_4}\). The considered UAV is fully actuated with four control inputs, which are used to control \(\varphi \), \(\Theta \), \(\Omega \), and z. Assume that \(X = {\left[ {\varphi ,{{\dot{\varphi }}},\Theta ,{{\dot{\Theta }}},\Omega ,{{\dot{\Omega }}},z,\dot{z}} \right] ^T}\) and \(U = {\left[ {{u_2},{u_3},{u_4},{u_1}} \right] ^T}\) denote the state and the controller vectors. The dynamic model considered in (12) based on the state space model is expressed as follows:
where F and G are written as:
where
The following lemma is considered in the analysis.
Lemma 1
Suppose a definite positive function V(t) satisfies:
where \(\alpha \)/\(\beta \) are positive, \(0< a < b\), and \(\gamma = \frac{a}{b}\), then V(t) in limited time (18) is converged to zero.

Designed control scheme
The designed control scheme is shown in Fig. 2. First, an adaptive model is identified for the plant using the input/output info, and then a SMC is designed. A T3-FLS is used to estimate the disturbances and identification errors.
Type-3 fuzzy systems
Type-2 extensions of traditional type-1 fuzzy systems, which are used in fuzzy logic to model uncertainty and imprecision in decision-making processes. These systems are particularly useful in situations where the uncertainty in the input data is high or where the decision-making process is complex. T2-FLSs allow for the representation of higher levels of uncertainty compared to type-1 FLSs. In a type-2 fuzzy system, each linguistic variable is associated with a fuzzy set that has a membership function that is itself a fuzzy set. This allows for the modeling of uncertainty in both the membership grade and the shape of the membership function. T2-FLSs are useful in situations where the uncertainty in the input data is not well understood or where there is a need to model varying levels of uncertainty.

Schematic of T3-FLS
T3-FLSs are an even more advanced extension of type-1 and type-2 FLSs. In a T3-FLS, each linguistic variable is associated with a fuzzy set that has a membership function that is a type-2 fuzzy set. This allows for the representation of even higher levels of uncertainty and complexity in the decision-making process. Type-3 fuzzy systems are particularly useful in situations where the uncertainty in the input data is extremely high or where there is a need to model complex relationships between variables. These systems offer a powerful tool for dealing with uncertainty and imprecision in complex decision-making processes, making them valuable tools for researchers and practitioners in a variety of domains. In this paper, T3-FLSs are used to estimate the disturbances and nonlinearities. The computations are summarized as follows (see Fig. 3): 1) The inputs are the states of plant \(\chi _i,\,i=1,...,n\).
2) The memberships \({{{\bar{q}} }_{{\tilde{\Psi }}_{i\,\,| {{\bar{\lambda } }_k}}^j}}\),  ,
,  , and
, and  for \({{\tilde{\Psi }}_i^j}\) (j-th membership function (MF) for \(\chi _i, \,i=1,2\)) are obtained as (see Fig. 4):
for \({{\tilde{\Psi }}_i^j}\) (j-th membership function (MF) for \(\chi _i, \,i=1,2\)) are obtained as (see Fig. 4):




where  represent the upper/lower slices.
represent the upper/lower slices.

Membership functions
3) The rule firings \({\bar{\ell }} _{{{{\bar{\lambda }} }_k}}^l\),  ,
,  , and
, and  are written as
are written as




4) The output is given as:

where,


Control
In this section, the control is designed and analyzed. The main results are summarized in Theorem 2. The output vector is \(y = {[\varphi ,\Theta ,\Omega ,z]^T}\), then the errors are defined as follows:
where \({y_d} = {[{\varphi _d},{\Theta _d},{\Omega _d},{z_d}]^T}\) is the reference output. The sliding surface is defined as:
where \({\alpha _l}'\), \(k_l\), \(l=1,...,4\) are positive constants. By taking derivative from (31), we can write:
Theorem 2
Considering the dynamic model as (13), sliding surfaces as (31), controllers (33), and adaptation laws (36)–(40), the robot in a limited time is reached to the target position.
The controllers are given as:
where \({{\hat{\varsigma }} _i}\,\,(i = 1,\,...\,,\,9)\), \({{\hat{h}}_j}\,\,(j = 1,\,2\,,\,3)\) and \({\hat{m}}\) are the estimation of:
\({\kappa _r}\,\,(r = 1,...,\,4)\) are written as:
The adaptation laws are written as:
Proof
Consider the \(V_1\) as:
Time derivative of \(V_1\) yields:
From the adaptation laws (36)–(40), we have:
From the fact that \({\textrm{sgn}} (\frac{{\partial {s_1}}}{{\partial {u_2}}}) = \left| {\frac{{\partial {s_1}}}{{\partial {u_2}}}} \right| /\frac{{\partial {s_1}}}{{\partial {u_2}}}\), we can write:
The equation (44) is simplified as:
From (45), we have:
By defining \(\gamma = \frac{{\vartheta + 1}}{2}\), it is concluded that:
There are \(\mu _1\) and \(\mu _2\) such that:
where
From Lemma 1, the convergence time is computed as follows. First, the both side of (48) is divided by \({V_1}^\gamma \):
Some computations result in:
Now, by taking integral from (51) at range [\(t_0-t_{s_1}\)], we have:
Then, \(t_{s_1}\) is obtained as:
The proof is completed. The other controllers are obtained in the same scheme, just the computations of \({\dot{{\hat{\varsigma }}} _9}\) and \(\dot{{\hat{m}}}\) are different. Consider \({V_4}\) as:
By taking time-derivative, we have:
Substitution the adaptation laws of \(\dot{w}_4\), \({\dot{\hat{\varsigma }} _9}\) and \(\dot{{\hat{m}}}\), yields:
By simplification and considering \({\textrm{sgn}} (\frac{{\partial {s_4}}}{{\partial {u_1}}}) = \left| {\frac{{\partial {s_4}}}{{\partial {u_1}}}} \right| /\frac{{\partial {s_4}}}{{\partial {u_1}}}\), we have:

Output signals

Control signals

Sliding surface

Adaptation trajectories

Adaptation trajectories
Considering \(\gamma = \frac{{\vartheta + 1}}{2}\), there are \(\gamma _7\) and \(\gamma _8\) such that:
where
\(\square \)
Remark 1
The suggested controller can be developed considering mismatched uncertain disturbances [34], hybrid models [35], and new disturbance rejection methods [36].
Simulation
The initial condition is considered as \({\chi _i}{\mathrm{(0)}} = 0{\mathrm{.10}}\,\,{\mathrm{(}}\forall \,{\textrm{i}} = 1,\,...\,,\,8{\mathrm{)}}\). The initial condition of adaptation rules are considered as: \({{\hat{\varsigma }} _i}{\mathrm{(0)}} = 0{\mathrm{.10}}\,\,\,(\forall \,{\textrm{i}} = 1,\,...\,{\textrm{,}}\,{\mathrm{9)}}\), \({{\hat{h}}_1}{\mathrm{(0) = 0}}{\mathrm{.10}}\), \({{\hat{h}}_2}{\mathrm{(0) = 0}}{\mathrm{.20}}\), \({{\hat{h}}_3}{\mathrm{(0) = 0}}{\mathrm{.30}}\) and \({\hat{m}}{\mathrm{(0) = 0}}{\mathrm{.65}}\). The designing parameters are considered as: \({\alpha '_1} = {\alpha '_2} = 2\), \({\alpha '_3} = {\alpha '_4} = 2\), \({k_1} = {k_2} = 10\), \({k_3} = {k_4} = 5\), \({\alpha _i} = 0.05\,\,\,(\forall i = 1,\,\,...,\,\,4)\), \({\beta _i} = 0.05\,\,\,(\forall i = 1,\,\,...\,,\,\,4)\), \(\vartheta = \frac{3}{7}\). The reference parameters are considered as: \({\varphi _d} = \frac{\pi }{3}\), \({\Theta _d} = \frac{\pi }{6}\), \({\Omega _d} = \frac{\pi }{2}\), and \({z_d} = 3\). It should be noted that the suggested controller is adaptive, and there is no such big restriction on choosing the control parameters. (Table 1) The trajectories of states are shown in Fig. 5. The results show that \([{\chi _1},{\chi _3},{\chi _5},{\chi _7}] = [\varphi ,\Theta ,\Omega ,z]\) follow the reference values \([{\varphi _d},{\Theta _d},{\Omega _d},{z_d}]\). The stabilization of other states is done in a limited time. The simulations show that by the use of the suggested method, the transient responses are faster and smoother. From (53) the time period is computed as follows. Suppose \({t_0} = 0\) and \(\gamma = \frac{{\vartheta + 1}}{2} = \frac{{3/7 + 1}}{2} = 0.71\). From (48), \(\mu _1\) and \(\mu _2\) are computed as:
By replacing \(\mu _1\) and \(\mu _2\) in (53), the time period is computed as \({t_{{s_1}}} = 2.6\). The others are computed in same way and we have \({t_{{s_2}}} = 2.72\), \({t_{{s_3}}} \simeq 4.21\), \({t_{{s_4}}} = 5.19\).
The control signals are shown in Fig. 6. The signals are smooth with suitable magnitude and fluctuation. The sliding surface is given in Fig. 7. This figure shows that the sliding surface works well and it converges to zero in a short time. The sliding surface converges to zero faster than conventional methods. The sliding signals demonstrate finite-time convergence. The convergence of free parameters is given in Figs. 8 and 9. We see that unknown parameters are converged in a finite time. The trajectories of adapted parameters are smooth and fast. According to simulations, it can be approved that the suggested control is effective for time-limited tracking of the UAVs. To better demonstrate the applicability of the suggested controller, the results are compared with a similar T2-FLS-based controller [21]. In [21], a T2-FLS controller is designed for UAVs, and its accuracy is compared with PID. The designed system is tested using a software-in-the-loop simulator and actual flight experiments. The compared mean square errors (MSEs) are given in Table 2. The values of MSE show that the suggested T3-FLS based controller has better results.
Conclusion
In this paper, the adaptation laws for the dynamic model are derived through the stability analysis, and adaptation error is compensated by an adaptive T3-FLS. The suggested T3-FLS is trained to improve the stability and eliminate the effect of adaptation error of parameters and disturbances. The designed scheme is applied to a case-study UAV with unknown dynamics perturbed by disturbances. The core concept involves incorporating the fundamental dynamics of UAVs and devising adaptation laws to improve modeling precision. Additionally, an optimized T3-FLS with SMC is implemented to eradicate adaptation errors and guarantee robustness. The simulations show the efficacy of the proposed method in achieving rapid and smooth transient responses, as well as the stabilization of various states within a constrained timeframe. The sliding surface demonstrates exceptional performance, swiftly converging to zero and surpassing traditional methods. Moreover, the adaptation of unknown parameters exhibits finite-time convergence, characterized by smooth and expeditious trajectories. Ultimately, the simulation outcomes affirm the effectiveness of the developed control approach for time-constrained tracking and stability of UAVs, thereby contributing to advancements in the field of control systems and robotics.
Data availability
The paper presents no data.
References
Azar AT, Sardar MZ, Ahmed S, Hassanien AE, Kamal NA (2023) Autonomous robot navigation and exploration using deep reinforcement learning with gazebo and ros. In: International Conference on Advanced Intelligent Systems and Informatics, Springer, pp 287–299
Dong B, Wang Y, Chen J, Zhang Z, An T (2023) Decentralized robust interaction control of modular robot manipulators via harmonic drive compliance model-based human motion intention identification. Complex Intell Syst 9(2):1247–1263
Candan F, Dik OF, Kumbasar T, Mahfouf M, Mihaylova L (2023) Real-time interval type-2 fuzzy control of an unmanned aerial vehicle with flexible cable-connected payload. Algorithms 16(6):273
Mahmoud TA, El-Hossainy M, Abo-Zalam B, Shalaby R (2024) Fractional-order fuzzy sliding mode control of uncertain nonlinear mimo systems using fractional-order reinforcement learning. Complex Intell Syst pp 1–29
Abd-Elhaleem S, Hussien MA, Hamdy M, Mahmoud TA (2023) Event-triggered model-free adaptive control for nonlinear systems using intuitionistic fuzzy neural network: simulation and experimental validation. Complex Intell Syst pp 1–27
Dong B, Jing Y, Zhu X, Cui Y, An T (2023) Adaptive impedance decentralized control of modular robot manipulators for physical human-robot interaction. J Intell Robot Syst 109(3):48
Wang J, Zhu B, Zheng Z (2023) Robust adaptive control for a quadrotor uav with uncertain aerodynamic parameters. IEEE Trans Aerosp Electron Syst
Nekoo SR, Acosta J, Ollero A (2023) Combination of terminal sliding mode and finite-time state-dependent riccati equation: Flapping-wing flying robot control. Proc Inst Mech Eng Part I J Syst Control Eng 237(5):870–887
Belmouhoub A, Bouzid Y, Medjmadj S, Derrouaoui SH, Siguerdidjane H, Guiatni M (2023) Fast terminal synergetic control for morphing quadcopter with time-varying parameters. Aerosp Sci Technol 141:108540
Mohammadzahri M, Khaleghifar A, Ghodsi M, Soltani P, AlSulti S (2023) A discrete approach to feedback linearization, yaw control of an unmanned helicopter. Unmanned Syst 11(01):57–66
Jin Z, Li D, Xiang J (2023) Robot pilot: A new autonomous system toward flying manned aerial vehicles. Engineering
Abdelghany MB, Moustafa AM, Moness M (2022) Benchmarking tracking autopilots for quadrotor aerial robotic system using heuristic nonlinear controllers. Drones 6(12):379
Abed AM, Rashid ZN, Abedi F, Zeebaree SR, Sahib MA, Mohamad Jawad AJ, Redha Ibraheem GA, Maher RA, Abdulkareem AI, Ibraheem IK et al (2022) Trajectory tracking of differential drive mobile robots using fractional-order proportional-integral-derivative controller design tuned by an enhanced fruit fly optimization. Meas Control 55(3–4):209–226
Li Y, Zhu X, Yin G (2023) Robust actuator fault detection for quadrotor uav with guaranteed sensitivity. Control Eng Pract 138:105588
Ahmed S, Azar AT (2023) Adaptive fractional tracking control of robotic manipulator using fixed-time method. Complex Intell Syst 10:1–14
Can A, Price J, Montazeri A (2022) A nonlinear discrete-time sliding mode controller for autonomous navigation of an aerial vehicle using hector slam. IFAC-PapersOnLine 55(10):2653–2658
Baba A, Alothman B (2023) A fuzzy logic-based stabilization system for a flying robot, with an embedded energy harvester and a visual decision-making system. Robot Auton Syst 167:104471
Mammadova K, Hamzayev S (2023) Motion trajectory planning of a mobile robot flying in a fuzzy environment. Sci Collect «InterConf+» 33 (155): 375–385
Kumar R, Singh UP, Bali A, Chouhan SS (2023) It2-neuro-fuzzy wavelet network with jordan feedback structure for the control of aerial robotic vehicles with external disturbances. In: Deep Learning and Other Soft Computing Techniques: Biomedical and Related Applications, Springer, pp 195–207
Ansarian A, Mahmoodabadi M (2023) Multi-objective optimal design of a fuzzy adaptive robust fractional-order pid controller for a nonlinear unmanned flying system. Aerosp Sci Technol 141:108541
Hailemichael A, Karimoddini A (2023) Development of a robust interval type-2 tsk fuzzy logic controlled uav platform. J Intell Robot Syst 107(2):27
Qadir S, Khatoon S, Shahid M (2023) Comparison of conventional, modern and intelligent control techniques on uav control. In: 2023 International Conference on Power, Instrumentation, Energy and Control (PIECON), IEEE, pp 1–6
Pussente GA, de Aguiar EP, Marcato AL, Pinto MF (2023) Uav power line tracking control based on a type-2 fuzzy-pid approach. Robotics 12(2):60
Huang H, Xu H, Chen F, Zhang C, Mohammadzadeh A (2023) An applied type-3 fuzzy logic system: practical matlab simulink and m-files for robotic, control, and modeling applications. Symmetry 15(2):475
Wu L, Huang H, Wang M, Alattas KA, Mohammadzadeh A, Ghaderpour E (2023) Optimal control of non-holonomic robotic systems based on type-3 fuzzy model. IEEE Access
Melin P, Castillo O (2023) An interval type-3 fuzzy-fractal approach for plant monitoring. Axioms 12(8):741
Castillo O, Castro JR, Melin P (2023) Forecasting the covid-19 with interval type-3 fuzzy logic and the fractal dimension. Int J Fuzzy Syst 25(1):182–197
Mohammadzadeh A, Taghavifar H, Zhang C, Alattas KA, Liu J, Vu MT (2024) A non-linear fractional-order type-3 fuzzy control for enhanced path-tracking performance of autonomous cars. IET Control Theory Appl 18(1):40–54
Taghavifar H, Mohammadzadeh A, Zhang W, Zhang C (2023) Nonsingleton gaussian type-3 fuzzy system with fractional order ntsmc for path tracking of autonomous cars. ISA Trans
Elhaki O, Shojaei K, Mohammadzadeh A (2023) Robust state and output feedback prescribed performance interval type-3 fuzzy reinforcement learning controller for an unmanned aerial vehicle with actuator saturation. IET Control Theory Appl 17(5):605–627
Singh DJ, Verma NK (2024) Interval type-3 ts fuzzy system for nonlinear aerodynamic modeling. Appl Soft Comput 150:111097
Bouadi H, Bouchoucha M, Tadjine M (2007) Modelling and stabilizing control laws design based on backstepping for an uav type-quadrotor. IFAC Proc Vol 40(15):245–250
Bouadi H, Bouchoucha M, Tadjine M (2007) Sliding mode control based on backstepping approach for an uav type-quadrotor. World Acad Sci Eng Technol 26(5):22–27
Yang G (2023) Asymptotic tracking with novel integral robust schemes for mismatched uncertain nonlinear systems. Int J Robust Nonlinear Control 33(3):1988–2002
Emadi A, Ozen M, Abdi A (2022) A hybrid model to study how late long-term potentiation is affected by faulty molecules in an intraneuronal signaling network regulating transcription factor CREB. Integr Biol 14(5):111–125
Yang G, Yao J (2024) Multilayer neurocontrol of high-order uncertain nonlinear systems with active disturbance rejection. Int J Robust Nonlinear Control 34(4):2972–2987
Funding
Funding was provied by National Natural Science Foundation of China (Grant No: 52361135807). The work was supported by Qatar Research, Development and Innovation (QRDI) fund HSREP05-1012-230035
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Cai, J., Zhang, H., Khadakar, A. et al. Automatic control of UAVs: new adaptive rules and type-3 fuzzy stabilizer. Complex Intell. Syst. 10, 7235–7248 (2024). https://doi.org/10.1007/s40747-024-01434-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40747-024-01434-y