
Abstract
We derive space–time a posteriori error estimates of finite-element method for the linear parabolic optimal control problems in a convex bounded polyhedral domain. The variational discretization is used to approximate the state and co-state variables with the piecewise linear and continuous functions, while the control variable is computed using the implicit relation between the control and co-state variables. The temporal discretization is based on the backward Euler method. The key feature of this approach is not to discretize the control variable but to implicitly utilize the optimality conditions for the discretization of the control variable. Our error analysis relies on the elliptic reconstruction technique introduced by Makridakis and Nochetto (SIAM J Numer Anal, 41:1585–1594, 2003) in conjunction with heat kernel estimates for linear parabolic problem. The use of elliptic reconstruction technique greatly simplifies the analysis by allowing us to take the advantage of existing elliptic maximum norm error estimate and the heat kernel estimate. We derive a posteriori error estimates for the state, co-state, and control variables in the \(L^\infty (0,T;\, L^\infty (\varOmega ))\)-norm. Numerical experiments are conducted to illustrate the performance of the derived estimators.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Let \(\varOmega \) be a convex bounded polyhedral domain in \(\mathbb {R}^d \, (d=2,\,3)\) with Lipschitz boundary \(\partial \varOmega \). Set \(\varOmega _T=\varOmega \times (0,T]\), \(\varGamma _T=\partial \varOmega \times (0,T]\) with \(T<\infty \). We consider the following parabolic optimal control problems:
subject to the state equation
and the control constraints
where \(y_0 \in L^\infty (\varOmega )\), \(y_d \in L^\infty (0,T;L^\infty (\varOmega ))\) and \(f \in L^\infty (0,T;L^\infty (\varOmega ))\). Here, \(y=y(x,t)\) and \(u=u(x,t)\) denote the state and the control variables, respectively. The set of admissible controls is defined by
with \(u_{a},u_{b}\in \mathbb {R}\) fulfill \(u_{a}<u_{b}\).
There have been extensive studies in the literature by numerous researchers on the finite-element approximations to optimal control problems. Some of recent progress in this area can be found in Barbu (1984), Becker and Kapp (1997), Becker et al. (1998), Haslinger and Neittaanmaki (1989), Hinze (2005), Lions (1971), Neittaanmaki and Tiba (1994), Pironneau (1984), Tiba (1995), and references quoted therein. In Hinze (2005), Hinze has introduced a variational discretization approach for elliptic optimal control problems. The main feature of this discretization is not to discretize the control variable but to implicitly utilize the optimality conditions and the discretization of the state and co-state variables to compute the control variable. The literature concerning a priori error analysis of finite-element methods for parabolic optimal control problems can be found in Knowles (1982), Nietzel and Vexler (2012), Rösch (2004), Winther (1978), and references therein. Recently, adaptive finite-element methods for approximating solutions to optimal control problems are the most important means to enhance accuracy and efficiency of the finite-element discretization. The adaptive method ensures a higher density of nodes in certain area of the given domain with the help of a posteriori error estimators where the solution is more difficult to approximate. There is a vast literature on a posteriori error estimates for parabolic optimal control problems using different approaches; for instance, see Langer et al. (2016), Liu and Yan (2003), Sun et al. (2013), Tang and Chen (2012a), Tang and Chen (2012b), Tang and Hua (2014),Xiong and Li (2011). While residual type a posteriori error estimates of finite-element methods for parabolic optimal control problems are discussed in Liu and Yan (2003), the authors of Tang and Chen (2012a) have derived a posteriori error bounds in the \(L^\infty (0,T;L^2(\varOmega ))\) and \(L^2(0,T;H^1(\varOmega ))\) norms with integral constraint. Tang and Chen (2012a) have studied a recovery type a posteriori error estimate for fully discrete variational discretization approximations of parabolic optimal control problems. The same authors have discussed a priori and a posteriori error analysis for parabolic control problems with control constraints using variational discretizations in Tang and Chen (2012b). Subsequently, Tang and Hua (2014) have established upper bounds in \(L^\infty (0,T;L^2(\varOmega ))-\)norm for the semi-discrete variational discretization approximations of optimal control problems using elliptic reconstruction. Later, Sun et al. (2013) have derived both lower and upper bounds of the errors for parabolic optimal control problems. For functional type a posteriori error estimates for parabolic optimal control problems, one may refer to Langer et al. (2016).
Most of adaptive finite-element methods are design to control only energy norms of solutions. The pointwise error control is also a natural goal when computing free boundaries. Some recent papers of adaptive finite-element method for controlling pointwise errors in elliptic and parabolic problems are contained in Dari et al. (2000), Demlow (2006, 2007), Nochetto (1995), Nochetto et al. (2003, 2005, 2006), Otárola et al. (2019), Boman (2000), Demlow et al. (2009), and Eriksson and Johnson (1995), respectively. For stationary optimal control problems, the authors of Otárola et al. (2019) have introduced an a posteriori error estimator which yields optimal rate of convergence in the maximum norm. Both reliability and efficiency of the estimators are discussed in Otárola et al. (2019). In the present work, we address control of the maximum norm error for the variational discretization approximations of the parabolic optimal control problems (1.1)–(1.3). The state and co-state variables are approximated using the piecewise linear and continuous functions, while the control variable is computed using implicit relation between the control and co-state variables. We derive a posteriori error estimates for the state, co-state, and control variables in the \(L^\infty (0,T;\,L^\infty (\varOmega ))\)-norm for both the semi-discrete and fully discrete variational discretization approximations. Essential to our error analysis is the elliptic reconstruction techniques and heat kernel estimate for linear parabolic problems. The elliptic reconstruction approach was introduced earlier by Makridakis and Nochetto (2003) in the context of semi-discrete problems for parabolic equations and subsequently extend to fully discrete problems in Lakkis and Makridakis (2006). The role of elliptic reconstruction operator in a posteriori estimates is quite similar to the role played by elliptic projection introduced by Wheeler (1973) for recovering optimal order error estimate in the priori error analysis of finite-element Galerkin approximations to parabolic problems. Compared to Otárola et al. (2019), our proofs employ only basic estimate for the heat kernel and the elliptic reconstruction error. The elliptic reconstruction technique greatly simplifies our analysis by allowing the straightforward combination of heat kernel estimates with existing elliptic maximum norm error estimates. To the best of authors’ knowledge, for the first time, we report the work on \(L^\infty (0,T;L^\infty (\varOmega ))\) a posteriori estimates for parabolic optimal control problems.
The paper is organized as follows. Section 2 contains some basic prerequisite materials for future use and optimal control problem. In Sect. 3, we discuss semi-discrete variational discretization approximation for optimal control problem (1.1)–(1.3) and derive a posteriori error estimates for semi-discrete problem. Section 4 is devoted to the fully discrete variational discretization approximations of optimal control problem (1.1)–(1.3) and derive a posteriori error estimates for the fully discrete problem. Numerical results are presented in Sect. 5. Finally, we present some concluding remarks in the last section.
2 Preliminaries
This section introduces notation for working function spaces to be used in the subsequent sections. Furthermore, we recall maximum norm a posteriori error estimates for elliptic problems and some properties of a Green’s function for the heat equation.
We shall adopt the standard notation \(W^{m,p}(\varOmega )\) for Sobolev spaces on \(\varOmega \) with norm \(\Vert \cdot \Vert _{m,p,\varOmega }\) and semi-norm \(|\cdot |_{m,p,\varOmega }\). When \(p=2\), we denote \(W^{m,p}(\varOmega )=H^m(\varOmega )\) with norm \(\Vert \cdot \Vert _{m,p,\varOmega }=\Vert \cdot \Vert _{m,\varOmega }\) and semi-norm \(|\cdot |_{m,p,\varOmega }=|\cdot |_{m,\varOmega }\). Let \(L^r(0,T;W^{m,p}(\varOmega ))\) be the Banach space of all \(L^{r}\)-integrable functions from [0, T] into \(W^{m,p}(\varOmega )\) with norm
and the standard modification for \(p=\infty \). We denote
where \(H_0^1(\varOmega )=\{v\in H^1(\varOmega ): \;v=0\;\text {on}\;\partial \varOmega \}\). We assume that the bilinear form \(a(\cdot ,\cdot )\) is bounded and coercive on \(H^1_0(\varOmega )\), i.e., \(\exists \) \(\alpha _0,\,\alpha _1>0\), such that
and
The weak form of parabolic optimal control problem (1.1)–(1.3) is defined as follows: Find a pair \((y, u)\in L^\infty (0,T;L^\infty (\varOmega ))\cap H^1(0,T;H^{-1}(\varOmega ))\times U_{ad}\), such that
subject to
Observe that \( L^\infty (0,T;L^\infty (\varOmega ))\cap H^1(0,T;H^{-1}(\varOmega ))\subset C^0([0,T]; L^{\infty }(\varOmega ))\).
It is well known Lions (1971) that the convex optimal control problem (2.1)–(2.2) has a unique solution (y, u) if and only if there exists a co-state variable p, such that the triplet (y, p, u) satisfies the following optimality conditions for \(t\in [0,T]\):
Let \(\varPi _{[u_a,u_b]}\) be a pointwise projection on the admissible set \(U_{ad}\), and defined as
Arguing as in Meyer and Rösch (2004), one can easily express the equivalent form of (2.7) as
We now introduce the reduced cost functional
where y(u) is the solution of (2.2). Hence, the optimal control problem (2.1)–(2.2) can be equivalently reformulated as
2.1 Elliptic a posteriori estimates
For \(\psi \in L^{\infty }(\varOmega )\), let \(\varPhi \in H^1_0(\varOmega )\) be the solution of
where \(\varOmega \subset \mathbb {R}^d (d=2,\,3)\) is a convex polyhedral domain. We assume that \(\mathcal {T}_h\) is a shape regular simplicial decomposition of \(\varOmega \), and define the finite-dimensional space \(V_{h}:=\{v_h\in C(\bar{\varOmega }):\;v_h|_{K} \in \mathbb {P}_1,\;\;\forall K\in \mathcal {T}_h\}\), where \(\mathbb {P}_1\) is the space of polynomials of degree\(\le 1\) on K and set \(V_h^0:= V_{h}\cap H^1_0(\varOmega )\). Let \(\varPhi _h \in V^0_h\) be the finite-element approximation to \(\varPhi \) defined by
For \(K_1,\;K_2 \in \mathcal {T}_h\), let E be the element side or face, such that \(E=K_1 \cap K_2\). We now define the jump residual across an element side E as
where \(\mathbf {n}_E\) is a unit normal vector to E at the point x. Let \(h_K\) be the diameter of the element K. For \( 1 \le p \le \infty \) and \(j\ge 0\), we define the elementwise error indicator as
and the global estimator as
We state an elliptic pointwise error estimate from (Nochetto et al. 2006).
Lemma 2.1
Let \(\varOmega \) be a convex bounded polyhedral domain in \(\mathbb {R}^d\; (d=2,\, 3),\) and \(\bar{h}=\displaystyle {\min _{K\in \mathcal {T}_h} h_K}\). Then, the following a posteriori error estimate:
holds.
To bound some of our fully discrete a posteriori error of finite element of the form \(\varPhi _1-\varPhi _2-(\varPhi _{h_1}-\varPhi _{h_2})\), where \(\varPhi _{h_1}\) and \(\varPhi _{h_2}\) are related to different finite element spaces defined on meshes at adjacent time steps, we recall the following results from Demlow et al. (2009).
Let \(V_{h_1}^0\) and \(V_{h_2}^0\) be the finite-element spaces associated on different meshes \(\mathcal {T}_{h_1}\) and \(\mathcal {T}_{h_2}\). Let \(\varPhi _{h_1}\in V_{h_1}^0\) and \(\varPhi _{h_2}\in V_{h_2}^0\) be the finite-element approximations of \(\varPhi _1\) and \(\varPhi _2\), respectively, and satisfy
For \(1 \le p \le \infty \) and \(j\ge 0\), we define the elementwise error indicator for \(\hat{K}\in \mathcal {T}_{h_1}\wedge \mathcal {T}_{h_2}\) by
where \(\varSigma _{\hat{K}}=(\varSigma _1 \cup \varSigma _2)\cap \hat{K}\; (\varSigma _1 \; \text {and}\; \varSigma _2 \) be the collection of all edges of elements \(\mathcal {T}_{h_1}\) and \(\mathcal {T}_{h_2}, respectively)\) and the global estimator is defined by
Lemma 2.2
Let \(\varOmega \subset \mathbb {R}^d\; (d=2,\,3)\) be a convex bounded polyhedral domain, and let \(\mathcal {T}_{h_1}\) and \(\mathcal {T}_{h_2}\) be compatible triangulations with \(\hat{h}=\displaystyle {\min _{x\in \varOmega }\min \{h_1(x), h_2(x)\}}\), we have
where \(C_{\varOmega }\) depends on the number of refinement steps used to pass from \(\mathcal {T}_{h_1}\) to \(\mathcal {T}_{h_2}\).
As our analysis depends heavily on the properties of the Green’s function for the heat equations, we cite the necessary results in the following two lemmas. The proof of first lemma can be found in Luskin and Rannacher (1982), and for the second lemma, we refer to Aronson (1968), Demlow et al. (2009).
Lemma 2.3
With \(\varPsi \in L^2(0,T;L^2(\varOmega ))\), let \(\varPhi \in L^2(0,T;H^2(\varOmega )\cap H^1_0(\varOmega ))\cap H^1(0,T;L^2(\varOmega ))\) be the solution of
Moreover, we have the following a priori estimate:
where \(C_R\) is the regularity constant.
Lemma 2.4
Let \(\varOmega \subset \mathbb {R}^d\; (d=2,\; 3)\) be a convex bounded polyhedral domain. Then, there exists a Green’s function \(\mathfrak {F}(x,t;w,s)\) for the problem (2.10)–(2.12), i.e., there exists a kernel \(\mathfrak {F}\), for \((x,t)\in \varOmega \times (0,T]\), the solution \(\varPhi (x,t)\) for (2.10)–(2.12) is given by
Moreover, \(s<t\), \(\mathfrak {F}\) satisfies the bound
3 Error analysis for semi-discrete control problem
This section is devoted to the spatially discrete optimization problem and derive a posteriori upper bounds for the state, co-state, and control variables in the \(L^\infty (0,T;L^\infty (\varOmega ))\)-norm.
Let \(\mathcal {T}_h\) be a regular triangulation of \(\varOmega \), such that \(\bar{\varOmega }=\displaystyle \cup _{K \in \mathcal {T}_h} \bar{K} \), and if \(K_1, K_2 \in \mathcal {T}_h\) and \(K_1 \ne K_2\), then either \(K_1 \cap K_2 = \emptyset \) or \(K_1 \cap K_2\) share a common edge or a common vertex.
Associated with \(\mathcal {T}_h\) is a finite-dimensional subspace \(V_h\) of \(C(\bar{\varOmega })\), such that \(v|_K\) is the polynomial of degree less than or equal to 1, for all \(v\in V_h\). Now, we set \(V^0_h=V_h\cap H^1_0(\varOmega )\).
The semi-discrete variational discretization approximations of (2.1)–(2.2) are to seek a pair \((y_h, u_h)\in C(0,T;V^0_h)\times U_{ad}\), such that
subject to
where \(y_{h,0}\in V^0_h\) is a suitable approximation or projection of \(y_0\).
It is well known Lions (1971) that the convex optimal control problem (3.1)–(3.2) has a unique solution \((y_h, u_h)\) if and only if there exists a co-state variable \(p_h \in C(0,T;V^0_h)\), such that the triplet \((y_h, p_h, u_h)\) satisfies the following optimality conditions for \(t\in [0,T]\):
Similar to the continuous case, we can express (3.7) equivalently to
Equation (3.8) reveals that the control variable \(u_h\) is the projection of a finite-element function (approximate co-state variable) onto the admissible space \(U_{ad}\).
Discrete elliptic operator: The discrete elliptic operator associated with the bilinear form \(a(\cdot ,\cdot )\) and the finite-element space \(V^0_h\) is the operator \(- \mathcal {A}_h:H_0^1(\varOmega )\rightarrow V^0_h+\mathcal {L}_h f\), such that for \(w\in H_0^1(\varOmega )\) and \(t\in (0,T]\),
where \(\mathcal {L}_h\) be the \(L^2\)-projection onto the finite-element space \(V_{h}\). Therefore, we have the following pointwise form of (3.3) and (3.5):
respectively.
To begin with, we first establish some intermediate error estimates for the state and co-state variables in the \(L^\infty (0,T;L^{\infty }(\varOmega ))\)-norm which will enable us to prove the main results of this section. This is accomplished by introducing elliptic reconstructions for the state and co-state variables. For this, we now introduce some auxiliary problems.
For \(\hat{u}\in U_{ad}\), let the pair
be the solutions of the following equations:
Define the errors for the state and co-state variables as follows:
From (3.3)–(3.6) and (3.9)–(3.12) with \(\hat{u}=u_h\), we obtain the following error equations for \(v\in H^1_0(\varOmega )\):
where \(\displaystyle {\mathcal {G}_y = f+u_h-\frac{\partial y_h}{\partial t}} \;\;\; \text {and} \;\;\;\displaystyle {\mathcal {\tilde{G}}_p =y_h-y_d+\frac{\partial p_h}{\partial t}.}\)
For \(t\in (0,T]\), we now define the elliptic reconstructions for the state and co-state variables as follows: for given \(y_h,\;p_h\), seek \(\tilde{y}\in H^1_0(\varOmega )\) and \(\tilde{p}\in H^1_0(\varOmega )\), such that
Using elliptic reconstructions \(\tilde{y}\), \(\tilde{p}\), we decompose the errors as
and
Using (3.14)–(3.17), we obtain
As a consequence of elliptic error estimate in Lemma 2.1, we obtain the following bounds for the elliptic reconstruction errors.
Lemma 3.1
Let \((\tilde{y}, \tilde{p})\in H^1_0(\varOmega )\times H^1_0(\varOmega )\) satisfy (3.16)–(3.17) and let Lemma 2.1 be valid. Then, for each \(t\in [0,T]\), the following estimates hold:
and
We next turn our attention to derive the bounds for \(\hat{\xi }_y\) and \(\hat{\xi }_p\).
Lemma 3.2
Let \(\hat{\xi }_y\) and \(\hat{\xi }_p\) satisfy (3.18) and (3.19), respectively. Then, for any \(t\in [0, T]\), the following estimates hold true:
and
where \(\mathfrak {E}_{\infty ,0}\) is the \(L^\infty \)-type residual estimator defined in (2.9). The constants \(c_1\) and \(c_{2}\) are positive and depend on the domain \(\varOmega \).
Proof
We know that \(\hat{\xi }_y\) satisfies (3.18). For any \((x,t) \in \varOmega \times (0,T]\), use of (2.13) leads to
An application of the Hölder’s inequality yields
With an aid of (2.14), we have
which combine with Lemma 2.1 to obtain
where the constant \(c_1\) depends on \(\varOmega \), and this proves the first inequality. The proof of the second inequality can be treated in a similar manner using the fact that \(\hat{\xi }_p(T)=0\). This completes the proof of the lemma. \(\square \)
Let (y, p, u) and \((y_h,p_h,u_h)\) be the solutions of (2.3)–(2.7) and (3.3)–(3.7), respectively. To derive a posteriori error bounds for the state and the co-state variables, we decompose the errors as follows:
and
where \(\hat{r}_y=y-y(u_h)\), \(\hat{r}_p=p-p(u_h)\) and \(\hat{e}_y\), \(\hat{e}_p\) are defined in (3.13). With the help of (2.3), (2.5), (3.9), and (3.11), we derive the following error equations for each \(t\in (0, T]\):
and
In the following lemma, we derive the bounds for \(\hat{r}_y\) and \(\hat{r}_p\).
Lemma 3.3
Let (y, p, u) and \((y(u_h),p(u_h))\) be the solutions of (2.3)–(2.7) and (3.9)–(3.12), respectively, with \(\hat{u}=u_h\). Then, the following estimates hold:
and
where C(R) depends on the regularity constant \(C_R\).
Proof
Note that, for any \(t \in [0,T]\)
Using the embedding result \(H^2(\varOmega )\hookrightarrow C(\bar{\varOmega })\) and Lemma 2.3, we obtain
where we have used the fact \(\hat{r}_y(0)=0\), and this proves the first inequality.
Analogously, the second inequality can easily be proved for \(\hat{r}_p\) using the fact \(\hat{r}_p(T)=0\). This completes the rest of the proof. \(\square \)
The following lemma presents the a posteriori error estimate for the control variable in the \(L^{2}(L^{2})\)-norm.
Lemma 3.4
Let (y, p, u) and \((y_h,p_h,u_h)\) be the solutions of (2.3)–(2.7) and (3.3)–(3.7), respectively. Assume that \((u_h+p_h)|_{K}\in H^1(K)\) and there exists a positive constant C, and \(\tilde{u}_h\in U_{ad}\), such that
Then, we have
where \(\tilde{C}=\max \{1,C\}\), and \((y(\hat{u}),p(\hat{u}))\) is solution of the system (3.9)–(3.12) with \(\hat{u}=u_h\).
Proof
Note that
Apply (2.7), and a simple calculation using (3.7) yields
To bound \(E_1\), we use the Cauchy–Schwarz inequality and the Young’s inequality to have
Setting \(v=p(u_h)-p\) in (3.20), and integrate the resulting equation from 0 to T. Then, an integration-by-parts formula with \(\hat{r}_y(0)=\hat{r}_p(T)=0\) leads to
Again, choose \(v=y(u_h)-y\) in (3.21) and integrate with respect to time from 0 to T to obtain
Use of (3.25) and (3.26) yields
Finally, assumption (3.22) and an application of the Young’s inequality lead to the bound of \(E_3\),
Altogether, (3.23), (3.24), (3.27), and (3.28) yield the desired estimates. This completes the proof. \(\square \)
By collecting Lemmas 3.1–3.4, we finally derive the main results for the state and co-state variables in the \(L^{\infty }(L^{\infty })\)-norm.
Theorem 3.5
Let (y, p, u) and \((y_h,p_h, u_h)\) be the solutions of (2.3)–(2.7) and (3.3)–(3.7), respectively. Let \(f\in L^{\infty }(0,T;L^{\infty }(\varOmega )) \cap W^{1,1}(0,T;L^{\infty }(\varOmega ))\). Then, the following a posteriori error estimates hold for each \(t\in (0,T]\),
where \(\tilde{C}_{1}\) depends on the domain \(\varOmega \) and the constant \(\tilde{C}\) as defined in Lemma 3.4,
where the constants \(\tilde{c}_1\) and \(\tilde{c}_2\) depend on the domain \(\varOmega \).
Proof
The first inequality follows from Lemmas 3.1, 3.2, and 3.4.
To prove the second inequality, we decompose the error in the state variable as
For any \( t \in (0,T]\), we have
An application of Lemma 3.1 yields
Using Lemma 3.2, it now follows that:
where \(c_i,\; i=1,3,4\) depend on \(\varOmega \). Altogether, these estimates and Lemma 3.3 lead to the desired result, where \(\tilde{c}_1=\max \{c_1, c_3, c_4\}\).
Similarly for the co-state variable, we use the triangle inequality to write
Again, using Lemmas 3.1–3.3 and a similar argument as above, we conclude that
where the constants \(c_i, \; i=2,4,5\) depend on the domain \(\varOmega \) and \(\tilde{c_2}=\max \{c_2, c_4, c_5, C_\varOmega \}\). This completes the proof. \(\square \)
Theorem 3.6
Let (y, p, u) and \((y_h,p_h, u_h)\) be the solutions of (2.3)–(2.7) and (3.3)–(3.7), respectively. Assume that all the conditions in Theorem 3.5 are valid. Then, for each \(t\in (0,T],\) there exists a positive constant \(\tilde{C}_2\), such that the following error estimate:
holds, where the constant \(\tilde{C}_2\) depends on the domain \(\varOmega \), the regularity constant \(C_R\), and the constant \(\tilde{C}_1\) as defined in Lemma 3.5.
Proof
From (2.8) and (3.8), we obtain
where we have used the Lipschitz continuity of \(\varPi _{[u_a,u_b]}\) with Lipschitz constant 1. An application of Lemma 3.1 and Theorem 3.5 completes the rest of the proof. \(\square \)
4 Error analysis for fully discrete control problem
This section describes the fully discrete variational discretization approximations of parabolic optimal control problem (3.1)–(3.2). Let \(0=t_0< t_1<\cdots <t_N=T\), be a partition of [0, T] with \(I_n=(t_{n-1},t_n]\) and \(k_n:=t_n-t_{n-1}\). Let \(\mathcal {T}_n:=\{K\}\,(0\le n\le N)\) be the triangulation of \(\bar{\varOmega }\) at the time level \(t_n\). We assume that \(\mathcal {T}_n\) satisfies the following conditions:
(1) If \(K_1,K_2\in \mathcal {T}_n\) and \(K_1\ne K_2\), then either \(K_1\cap K_2=\emptyset \) or \(K_1\cap K_2\) share a common edge or a common vertex.
(2) Two simplicial decompositions \(\mathcal {T}_{n-1}\) and \(\mathcal {T}_{n}\) of \(\overline{\varOmega }\) are said to be compatible if they are derived from the same macro-triangulation \(\mathcal {T}=\mathcal {T}_0\) by an admissible refinement procedure which preserves the shape regularity (Brenner and Scott 2008) and assures that for any elements \(K\in \mathcal {T}_{n-1}\) and \(K'\in \mathcal {T}_{n}\), either \(K\cap K'=\emptyset \), \(K\subset K'\), or \(K'\subset K\). There is a natural partial ordering on a set of compatible triangulations namely \(\mathcal {T}_{n-1}\le \mathcal {T}_{n}\) if \(\mathcal {T}_n\) is a refinement of \(\mathcal {T}_{n-1}\). Then, for a given pair of successive compatible triangulations \(\mathcal {T}_{n-1}\) and \(\mathcal {T}_n\), we define naturally the finest common coarsening \(\hat{\mathcal {T}_{n}}:=\mathcal {T}_n\wedge \mathcal {T}_{n-1}\) with local mesh sizes are given by \(\displaystyle {\hat{h}_n:=\max \{h_{n-1},h_n\}}\). These conditions allow us to bound the elliptic errors which lie in two adjacent finite-element spaces, see Lakkis and Makridakis (2006).
We shall also need the following notation for future use. For \(0\le n\le N\), let \(\mathcal {E}_n:=\{E\}\) be the set of all edges of the triangles \(K\in \mathcal {T}_n\) which do not lie on \(\partial \varOmega \), and \(\varSigma _n:=\cup _{E \in \mathcal {E}_n}E\). Furthermore, we will also use the sets \(\hat{\varSigma }_n:=\varSigma _n\cap \varSigma _{n-1}\) and \(\check{\varSigma }_n:=\varSigma _n\cup \varSigma _{n-1}\).
For each \(n=0,\ldots ,N\), we consider the finite-element spaces \(V^n\) corresponding to the triangulation \(\mathcal {T}_n\) as follows:
where \(\mathbb {P}_1(K)\) is the space of polynomials of degree less than or equal to 1 on K. Set \(V_0^n=V^n\cap H^1_0(\varOmega )\).
For the purpose of fully discrete approximation, we need the following notation:
where \(\mathcal {L}^n_h\) is the \(L^2\)-projection from \(L^2(\varOmega )\) to \(V^n\).
Representation of the bilinear form: For a function \(v\in V^n_0\,(0\le n\le N)\), the bilinear form a(v, w) can be represented as
where \(J_1[v]\) denotes the spatial jump of the field \(\nabla v\) across an element side \(E\in \mathcal {E}_n\) defined as
where \(\mathbf {n}_E\) is a unit normal vector to E at the point x.
Let \(\mathcal {L}^n_h\) and \(\mathcal {L}^n_{h,0}\) be the \(L^2\)-projections onto \(V^n\) and \(V_0^n\), such that
Discrete elliptic operator: The discrete elliptic operator associated with the bilinear form \(a(\cdot ,\cdot )\) and the finite element space \(V^n_0\) is the operator \(\mathcal {A}_h^n:H_0^1(\varOmega )\rightarrow V^n_0+\mathcal {L}^n_h f^n\), such that for \(v\in H_0^1(\varOmega )\) and \(0\le n\le N\),
The fully discrete variational discretization approximations of the problem (2.1)–(2.2) are defined as follows: Find \((y_h^n, u_h^n)\in V^n_0 \times U_{ad}\), for \(n\in [1:N]\), such that
subject to
where \(y_{h,0}\) is the suitable approximation or projection of \(y_0\) in \(V_0^0\).
The optimal control problem (4.1)–(4.2) admits a unique solution \((y_h^n, u_h^n)\) if and only if there exists a co-state \(p_h^{n-1}\in V^n_0\), such that the following optimality conditions are satisfied: For each \(n\in [1:N]\),
Given a sequence of discrete values \(\{y_h^n\}\), \(n=0,1,\ldots ,N\), we associate a continuous function of time defined by the continuous piecewise linear interpolant \(Y_h(t)\), \(t\in I_n\) as
Similarly, we define \(P_h(t)\), \(t\in I_n\), from the set of values \(\{p_h^n\},\;n=0,1,\ldots ,N\) as
and
Finally, we define \(Y^n_{h,t}=\frac{\partial }{\partial t}Y_h|_{I_n}\) and \(P^n_{h,t}=\frac{\partial }{\partial t}P_h|_{I_n}\). Furthermore, we note that the values of \(Y_h(t)\) and \(P_h(t)\) at the nodal point \(t=t_n,\, n=1,\,2,\ldots ,N\) are coincided with \(y_h^n\) and \(p_h^n\), respectively.
The weak form of fully discrete schemes (4.3) and (4.5) can be easily transformed into the pointwise form as
This implies that
Then, the optimality conditions (4.3)–(4.7) can be stated as follows:
Analogous to the continuous case, we reformulate the discrete optimal control problem (4.1)–(4.2) as
Analogous to the semi-discrete error analysis, we first derive some intermediate error estimates for the state and co-state variables in the \(L^\infty (L^{\infty })\)-norm. Here, the fully discrete analogues of elliptic reconstructions for the state and co-state variables are treated as intermediate objects in the error analysis.
For the purpose of error analysis, we shall define the errors for the state and co-state variables as follows:
From (3.9), (3.11), (4.10), and (4.12) with \(\hat{u}=U_h\), we have the following error equations for \(v\in H^1_0(\varOmega )\):
where
We now define the elliptic reconstructions at \(t=t_n\), \(n\in [1:N]\) as follows: For given \(y_h^n,\;p_h^{n-1}\), seek \(\tilde{y}_h^n,\; \tilde{p}_h^{n-1}\in H^1_0(\varOmega )\) satisfying
and
where
and
Using a sequence of discrete values \(\{\tilde{y}_h^n\}\) for \(n=0,1,\ldots ,N\), we set a continuous function of time defined by piecewise linear interpolant \(\tilde{y}(t)\) as
Similarly, we define \(\tilde{p}(t)\) from the set of values \(\{\tilde{p}_h^n\}\), \(n=1,\ldots ,N\) as
We note that functions \(\tilde{y}\) and \(\tilde{p}\) satisfy, for each \(t\in [0,T]\), the following equations:
From (4.8) and (4.9), we obtain
Using elliptic reconstruction, we decompose the errors as
Note that
where \(l(t)=\frac{t-t_{n-1}}{k_n}\). Using (4.17)–(4.18) in (4.15)–(4.16), we obtain
Now, we state the following lemma for elliptic error bounds in \(L^{\infty }(L^{\infty })\)-norm.
Lemma 4.1
Let \((\tilde{y}_h^n,\tilde{p}_h^{n-1})\in H^1_0(\varOmega )\times H^1_0(\varOmega )\) satisfy (4.17)–(4.18). Then, \(0\le n\le N\), we have
Moreover, for \(n\in [1:N]\), we have
where \(C(\varOmega )\) is a positive constant depend on \(\varOmega \).
In the following lemma, we derive the bounds for \(\xi _y\) and \(\xi _p\).
Lemma 4.2
Let \(\xi _y\) and \(\xi _p\) satisfy (4.19) and (4.20), respectively. Then, for any \(1\le m \le N\) with \(\displaystyle {\hat{h}_m=\min _{1\le n\le m}\min _{K \in \mathcal {T}_n}h_K}\), the following estimates hold:
and
In the above, the constants \(c_6\) and \(c_7\) are positive and depend on the domain \(\varOmega \).
Proof
Note that \(\xi _y\) satisfies (4.19), for any \(t_m\in [0,T]\), a fix point \(x_m\in \varOmega \), and an application of (2.13) leads to
using the Hölder’s inequality and (2.14) with \(|\xi _y(x_m,t_m)|=\Vert \xi _y(t_m)\Vert _{L^{\infty }(\varOmega )}\)(since \(x_m\) is fixed), we obtain
Use of Lemma 2.2 leads to
and this completes the proof of (4.21).
To prove (4.22), we first note that \(\xi _p\) satisfies (4.20). For any \(t_m\in [0,T]\) and fix point \(x_m \in \varOmega \), a similar argument as before leads to
An application of the Hölder’s inequality and (2.14) with \(|\xi _p(x_m,t_m)|=\Vert \xi _p(t_m)\Vert _{L^{\infty }(\varOmega )}\) yields
An application of Lemma 2.2 and \(\xi _p(T)=0\) imply
which completes the rest of the proof. \(\square \)
Let (y, p, u) and \((Y_h, P_h, U_h)\) be the solutions of (2.3)–(2.7) and (4.10)–(4.14), respectively. To derive a posteriori error bounds for the state and co-state variables, we decompose the errors as follows:
From (2.3), (2.5), (3.9), and (3.11) with \(\hat{u}=U_h\), we derive the following error equations:
The following lemma provides the bounds for \(r_y\) and \(r_p\).
Lemma 4.3
Let (y, p, u) and \((y(\hat{u}),p(\hat{u}))\) be the solutions of (2.3)–(2.7) and (3.9)–(3.12) with \(\hat{u}=U_h\), respectively. Then, for any \(1\le m \le N\), we have
and
Proof
Following the lines of argument of Lemma 3.3, the proof of inequalities (4.25) and (4.26) can easily be obtained. The details are thus omitted. \(\square \)
In the following lemma, we derive the a posteriori error estimate for the control variable in the \(L^{2}(L^{2})\)-norm.
Lemma 4.4
Let (y, p, u) and \((Y_h,P_h,U_h)\) be the solutions of (2.3)–(2.7) and (4.10)–(4.14), respectively. Assume that \((U_h+P_h^{n-1})|_{K}\in H^1(K)\) and \(\tilde{u}_h\in U_{ad}\), and there exists a positive constant C, such that
Then, we have
where \(\tilde{C}_3=\max \{1,C\}\), and \((y(\hat{u}),p(\hat{u}))\) is defined by the system (3.9)–(3.11) with \(\hat{u}=U_h\).
Proof
From (2.7), we have
using the above inequality, it follows that
An use of (4.14) yields
Following the idea of Lemma 3.4, it is easy to bound the term \(\hat{E}_i,\;i=1,2,3\). Therefore, we omit the details. This completes the proof. \(\square \)
By collecting Lemmas 4.1–4.4, we finally derive the main results of this paper.
Theorem 4.5
Let (y, p, u) and \((Y_h,P_h, U_h)\) be the solutions of (2.3)–(2.7) and (4.10)–(4.14), respectively. Then, there exists constants \(\tilde{c}_3\), \(\tilde{c}_4\)(depend on \(\varOmega \)), for each \(t\in (0,T],\) and any \(1\le m \le N\) with \(\displaystyle {\hat{h}_m=\min _{1\le n\le m}\min _{K \in \mathcal {T}_n}h_K}\), the following estimates
where the constant \(\tilde{C}_4\) depends on the domain \(\varOmega \) and the constant \(\tilde{C}_3\) as defined in Lemma 4.4,
hold.
Proof
The first inequality (4.27) follows from Lemma 4.4. Next, to prove error estimate for the state variable, we write
For a fix \( x_m \in \varOmega \) and \( t_m \in (0,T]\), we have
Using Lemma 4.1, the last term of the right hand side is bounded as
By Lemma 4.2, we have
Since \(r_y(0)=0\), apply Lemma 4.3 to obtain
where \(c_i, \; i=4,6,8\) depend on \(\varOmega \). Combining these above estimates and setting \(\tilde{c}_3=\max \{c_4, c_6, c_8\}\), we accomplish (4.28).
Next, we estimate the error for the co-state variable. By the triangle inequality, for any \(t_m \in (0,T]\), we have
We apply Lemmas 4.1–4.3 with \(\xi _p(T)=0\) and \(r_p(T)=0\) to arrive at
where the constants \(c_i|_{i=7,9}\) depend on the domain \(\varOmega \). Setting \(\tilde{c_4}=\max \{c_7, c_9\}\), we complete the rest of the proof. \(\square \)
Theorem 4.6
Let (y, p, u) and \((Y_h,P_h, U_h)\) be the solutions of (2.3)–(2.7) and (4.10)–(4.14), respectively. Assume that all the conditions in Theorem 4.5 are valid. For each \(t\in (0,T]\), there exists a positive constant \(\tilde{C}_5\), such that the following error estimate
holds, where the constant \(\tilde{C}_5\) depends on the domain \(\varOmega \), the regularity constant \(C_R\), and the constant \(\tilde{C}_4\) as defined in Lemma 4.5.
Proof
Use of pointwise projection of u and \(U_h\) leads to
In the above, we have used the Lipschitz continuity of \(\varPi _{[u_a,u_b]}\) with Lipschitz constant 1. Inviting Theorem 4.5, we complete the rest of the proof. \(\square \)
5 Numerical experiments
This section performs two numerical experiments to illustrate the theoretical results of the previous section. For the purpose of adaptive refinement, we need the following error estimators:
-
initial data estimator \((\eta _{1})=\Vert y_0-y_{h,0}\Vert _{L^\infty (\varOmega )}\),
-
spatial estimator for the state \((\eta _{2})=(\ln \hat{h}_m)^2\mathfrak {E}_{\infty ,0}(y_h^m,\mathcal {G}^m_y)\),
-
temporal error estimator for the state \((\eta _{3})={\sum _{n=1}^m\int _{I_n}}\Vert f^n-f\Vert _{L^{\infty }(\varOmega ))}\,\mathrm{d}s+\frac{k_n}{2}\Vert \mathcal {G}_y^{n-1}-\mathcal {G}_y^n\Vert _{L^{\infty }(\varOmega )}\),
-
spatial estimator for the co-state \((\eta _{4})=(\ln \hat{h}_m)^2\mathfrak {E}_{\infty ,0}(p_h^m,\mathcal {\tilde{G}}^m_p)\),
-
temporal error estimator for the co-state \((\eta _{5})={\sum _{n=1}^m\int _{I_n}}\Vert y_d-y_d^n\Vert _{L^{\infty }(\varOmega )}\mathrm{d}s+\frac{k_n}{2}\Vert \mathcal {\tilde{G}}_p^{n}-\mathcal {\tilde{G}}_p^{n+1}\Vert _{L^{\infty }(\varOmega )}\)
-
a control error estimator \((\eta _{6})={\Big (\int _0^T\sum _{K\in \mathcal {T}_n}h^2_{K}|U_h+P_h^{n-1}|_{H^1(K)}^2\,\mathrm{d}s\Big )^{1/2}}\), and
-
\(L^\infty \)-type error estimators
$$\begin{aligned} \eta _{7}= & {} \left( \ln \hat{h}_m\right) ^2 \sum _{n=1}^mk_n\mathfrak {\hat{E}}_{\infty ,0}\left( \frac{y_h^n-y^{n-1}_h}{k_n}, \mathcal {G}_y^n-\mathcal {G}_y^{n-1}; \mathcal {T}_{n-1},\mathcal {T}_n\right) ,\\ \eta _{8}= & {} \left( \ln \hat{h}_m\right) ^2 \sum _{n=1}^m k_n \mathfrak {\hat{E}}_{\infty ,0}\left( \frac{p_h^{n-1}-p_h^n}{k_n}, \mathcal {\tilde{G}}_p^{n}-\mathcal {\tilde{G}}_p^{n+1}; \mathcal {T}_{n-1}, \mathcal {T}_n\right) . \end{aligned}$$
The effective index of the a posteriori error estimator is defined as \(\eta / E\), where the total estimated error (\(\eta \)) and the total error (E) are given by \(\eta (y,p,u):=\sum _{j=1}^8 \eta _j\) and
respectively. The numerical simulation is carried out with the help of the software FreeFem++ Hetch (2012) and all the constants involved in the estimators are taken to be 1. We use the following loop:
to achieve a refinement from the initializing triangulation.
Space–time adaptive algorithm: Given tolerances \( \mathcal {E}_{space}\), \( \mathcal {E}_{time}\) and the parameters \(\delta _1\in (0,1), \; \delta _2>1\), \(\lambda _1 \in (0,1)\), \(\lambda _2\in (0, \lambda _1)\). Suppose that \((y^{n-1}_h, p^{n}_h, u^{n-1}_h)\) is computed on the mesh \(\mathcal {T}_{n-1}\) at time level \(t_{n-1}\) with time step-size \(k_{n-1}\) using the variational discretization algorithm (see Tang and Chen 2012b).
Step 1. set \(\mathcal {T}_n:=\mathcal {T}_{n-1},\;\; k_n:=k_{n-1},\;\; t_n:=t_{n-1}+k_{n}\)
-
compute \((y^n_h, p^{n-1}_h, u^{n}_h)\) on \(\mathcal {T}_n\) using data \((y^{n-1}_h, p^{n}_h, u^{n-1}_h)\)
-
from the discrete problem
-
compute the estimators \(\eta _j,\; j=1,\ldots , 8\) on \(\mathcal {T}_n\)
Step 2. while \(\big (\sum _{j\in \{3,5\}}\eta _j\big ) > \lambda _1 \cdot \mathcal {E}_\mathrm{time}\) do
-
\( k_n:=\delta _1 k_{n-1},\;\; t_n:=t_{n-1}+k_{n}\)
-
compute \((y^{n}_h, p^{n-1}_h, u^{n}_h)\) on \(\mathcal {T}_n\) by solving the discrete problem
-
compute the estimators \(\eta _j,\; j=1,\ldots , 8\) on \(\mathcal {T}_n\)
end while
Step 3. while \(\big (\sum _{j\in \{1,2,4,6,7,8\}} \eta _j\big ) > \mathcal {E}_\mathrm{space}\) do
-
refine mesh \(\mathcal {T}_n\) generate a modified mesh (say) \(\mathcal {T}_n^{h_n}\)
-
compute \((y^{n}_h, p^{n-1}_h, u^{n}_h)\) on \(\mathcal {T}_n^{h_n}\) by solving the discrete problem
-
compute the estimators \(\eta _j,\; j=1,\ldots , 8\) on \(\mathcal {T}_n^{h_n}\)
while \(\big (\sum _{j\in \{3,5\}}\eta _j\big ) > \lambda _1 \cdot \mathcal {E}_{time}\) do
-
\( k_n^{'}:=\delta _1 k_{n-1},\;\; t_n:=t_{n-1}+k_n^{'}.\)
-
compute \((y^{n}_h, p^{n-1}_h, u^{n}_h)\) on \(\mathcal {T}_{n,k_n^{'}}^{h_n}\) by solving the discrete problem.
-
compute the estimators \(\eta _j\; j=1,\ldots , 8\) on \(\mathcal {T}_{n,k_n^{'}}^{h_n}\)
end while
end while
Step 4. if \(\big (\sum _{j\in \{3,5\}}\eta _j\big ) \le \lambda _2 \cdot \mathcal {E}_\mathrm{time}\) do
set \( k_n^{'}:=\delta _2 k_{n-1},\;\; t_n:=t_{n-1}+k_{n}^{'}\)
end if
The role of Step 2 is to reduce the time step-size to keep the time error estimator below the tolerance \( \mathcal {E}_{time}\) while keeping the space mesh unchanged. In Step 3, the refinement procedure is carried out until the time and space error estimators satisfy the desired tolerances. In the last step, if the time error estimator is much less than the prescribe time tolerance \( \mathcal {E}_{time}\), then we increase the time step size by multiplying a factor \(\delta _2\). For marking and refinement of the elements \(K\in \mathcal {T}_n\), we follow the strategy of Morin, Nochetto, and Siebert, see (Morin et al. 2000). For both the test example problems, we choose tolerances for time and space as \( \mathcal {E}_{time}=\mathcal {E}_{space}=0.001\).
Example 5.1
We consider the spatial domain \(\varOmega =[0, 1]\times [0, 1]\) and the time interval \([0, T]=[0, 1]\). We shall use the following data for the optimal control problem (1.1)–(1.3):
with \( u_a=-0.125,\;\; \text {and}\;\; u_b=+0.125\).
Note that functions f, \(y_d\) and u are easily determined from the control problem (1.1)–(1.3) as
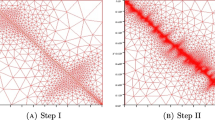
We approximate the time derivative by the backward Euler method. We partition the time interval [0, 1] with the step-size \(\varDelta t\approx 5.56\times 10^{-3}\), such that \(t_n=n\varDelta t,\; n=1,2,...N\) with the initial mesh \( N=T/\varDelta t(=180)\). In the variational discretization, we use piecewise linear and continuous functions for approximations of the state (y) and co-state (p) variables, whereas the control variable (u) is computed using implicit relation between u and p. The variational discretization algorithm is used to solve the fully discrete optimal control problem (4.1)–(4.2). The adaptive meshes are generated via the error estimators \(\eta _i,\; i=1,\;2,\;\ldots ,\;8.\) We present some computational results by setting tolerances 0.001 and the time step-size \(\varDelta t=5.56 \times 10^{-3}\). In Figs. 2 and 3, the plots of approximate solutions of y and u are depicted on uniform mesh, adaptive mesh step-(I), and adaptive mesh step-(II), respectively, at final time \(T=1.0\). Table 1 presents mesh information and errors for the state, co-state, and control variables in the \(L^{\infty }(L^\infty )\)-norm. This table also reveals that the number of nodes required for adaptive mesh is much less in comparison to the uniform mesh. It is clear from Fig. 1 that the mesh adapts very well in the neighbourhood of the discontinuous line \(x_1 + x_2 = 1\). The higher densities of the node points are distributed along the line \(x_1 + x_2 = 1\) enable us to save convincing computational work in comparison to uniform mesh. In Table 2, we present the effective index of the total estimators. It is further observed that the total estimated error \((\eta )\) and the total error (E) are decreasing with the increase of number of degrees of freedom (# Dof). The effective index of the a posteriori estimator almost remains constant which exhibits the potential quality of our estimators. The plots for the estimated error verses # Dof, the total error verses # Dof (left), and effective indexes verses # Dof (right) are shown in Fig. 4.

Uniform mesh, adaptive mesh step-(I), and adaptive mesh step-(II)

Plots of discrete solution on uniform mesh, adaptive mesh step-(I), and adaptive mesh step-(II), respectively

Approximate controls corresponding to uniform mesh, adaptive mesh step-(I), and adaptive mesh step-(II), respectively

Estimated and total errors (left); effective index (right)
The following example considers a three-dimensional data for the control problem (1.1)–(1.3).
Example 5.2
In this example, we consider the domain \(\varOmega =[0,1]\times [0,1]\times [0, 1 ]\) with time interval \([0, T]=[0, 1]\) for the control problem (1.1)–(1.3) and use the following data:
with \(x=(x_1,x_2,x_3)\), \(u_a=-0.075\) and \(u_b=0.075\). Note that the functions f, \(y_d\) and u are computed from (5.15.2)-(5.3).
Similar to the previous example, we compute errors for the state, co-state, and control variables in the \(L^\infty (L^\infty )\)-norm. The errors for the state, co-state, and control variables on the uniform mesh as well as on the adaptive mesh are presented in Table 3. We notice that the number of nodes in the adaptive mesh is much less with comparison to the uniform mesh. Table 4 contains the information on the number of elements, # Dof, total estimated error, the total error, and the effective index. It is observed that the total estimated error (\(\eta \)) and the total error (E) are decreasing with the increase of # Dof. Furthermore, the effective index remains almost constant in the computation. Finally, in Fig. 5, the estimated error, total error verses # Dof (left), and the effective indexes verses # Dof (right) are presented.

Estimated and total errors (left); effective index (right)
6 Concluding remarks
In this article, we have derived a posteriori error estimates in the \(L^\infty (L^\infty )\)-norm for variational discretization approximations of the parabolic optimal control problems. We have used the variational discretization approximations where the state and co-state variables are approximated using the piecewise linear and continuous functions, and the control variable is computed using the implicit relation between control and co-state variables (see, (2.8)). The elliptic reconstruction technique in conjunction with Green’s function for the heat kernel are key ingredients in deriving the a posteriori error bounds. Interestingly, the constants involved in Theorems 4.5 and 4.6 are independent of time, but may depend on the domain (\(\varOmega \)). In fact, some of the constants are stemming from the use of elliptic a posteriori error estimates. The proposed method does not require the discretization of the admissible control set but to implicitly utilize the optimality conditions for the discretization of the control variable. Our theoretical analysis is supported by numerical experiments which reveals that the adaptive scheme is able to save the substantial computational work.
Change history
05 March 2022
A Correction to this paper has been published: https://doi.org/10.1007/s40314-021-01755-5
References
Aronson D. G (1968) Non-negative solutions of linear parabolic equations. Ann Scuola Norm Sup Pisa (3) 22:607–694
Barbu V (1984) Optimal control for variational inequalities, research notes in mathematics, Vol 100, Pitman, London
Becker R, Kapp H (1997) Optimization in PDE models with adaptive finite element discretization. In: Proc. ENUMATH97, Heidelberg, Sep. 29–Oct.3, World Scientific Publ., 1998
Becker R, Kapp H, Rannacher R (1998) Adaptive Finite element methods for optimal control of partial differential equations: basic concept, SFB359, University Heidelberg
Boman M (2000) On a posteriori error analysis in the maximum norm. Phd thesis, Chalmers University of Technology and Göteborg University
Brenner SC, Scott LR (2008) The mathematical theory of finite element methods, texts in applied mathematics. Springer, New York
Dari E, Duran RG, Padra C (2000) Maximum norm error estimators for three dimensional elliptic problems. SIAM J Numer Anal 37:683–700
Demlow A (2006) Localized pointwise a posteriori error estimates for gradients of piecewise linear finite element approximations to second-order quasilinear elliptic problems. SIAM J Numer Anal 44:494–514
Demlow A (2007) Local a posteriori estimates for gradient errors in finite element methods for elliptic problems. Math Comp 76:19–42
Demlow A, Lakkis O, Makridakis C (2009) A posteriori error estimates in the maximum norm for parabolic problems. SIAM J Numer Anal 47:2157–2176
Eriksson K, Johnson C (1995) Adaptive finite element methods for parabolic problems II: Optimal estimates in \(L^\infty (L^2)\) and \(L^\infty (L^\infty )\). SIAM J Numer Anal 32:706–740
Haslinger J, Neittaanmaki P (1989) Finite element approximation for optimal shape design. Wiley, Chichester
Hetch F (2012) New development in free Fem++. J Numer Math 20:251–265
Hinze M (2005) A variational discretization concept in control constrained optimization: the linear quadratic case. Comput Optim Appl 30:45–63
Knowles G (1982) Finite element approximation of parabolic time optimal control problems. SIAM J Control Optim 20:414–427
Lakkis O, Makridakis C (2006) Elliptic reconstruction and a posteriori error estimates for fully discrete linear parabolic problems. Math Comp 75:1627–1658
Langer U, Repin S, Wolfmayr M (2016) Functional a posteriori error estimates for parabolic time-periodic parabolic optimal control problems. Numer Funct Anal Optim 37:1267–1294
Lions JL (1971) Optimal control of systems governed by partial differential equations. Springer-Verlag, Berlin
Liu W, Yan N (2003) A posteriori error estimates for optimal control problems governed by parabolic equations. Numer Math 93:497–521
Luskin M, Rannacher R (1982) On the smoothing property of the Galerkin method for parabolic equations. SIAM J Numer Anal 19:93–113
Makridakis C, Nochetto RH (2003) Elliptic reconstruction and a posteriori error estimates for parabolic problems. SIAM J Numer Anal 41:1585–1594
Meyer C, Rösch A (2004) Superconvergence properties of optimal control problems. SIAM J Control Optim 43:970–985
Morin P, Nochetto RH, Siebert KG (2000) Data oscillation and convergence of adaptive FEM. SIAM J Numer Anal 38:466–488
Neittaanmaki P, Tiba D (1994) Optimal control of nonlinear parabolic systems: theory, algorithms and applications. M. Dekker, New York
Nochetto RH (1995) Pointwise a posteriori error estimates for elliptic problems on highly graded meshes. Math Comp 64:1–22
Nochetto RH, Schmidt A, Siebert KG, Veeser A (2003) Pointwise a posteriori error control for elliptic obstacle problems. Numer Math 95:163–195
Nochetto RH, Schmidt A, Siebert KG, Veeser A (2005) Fully localized a posteriori error estimators and barrier sets for contact problems. SIAM J Numer Anal 42:2118–2135
Nochetto RH, Schmidt A, Siebert KG, Veeser A (2006) Pointwise a posteriori error estimates for monotone semilinear problems. Numer Math 104:515–538
Nietzel I, Vexler B (2012) A priori error estimates for space-time finite element discretization of semilinear parabolic optimal control problems. Numer Math 120:345–386
Otárola E, Rankin R, Salgado AJ (2019) Maximum-norm a posteriori error estimates for an optimal control problem. Comput Optim Appl 73:997–1017
Pironneau O (1984) Optimal shape design for elliptic systems. Springer-Verlag, Berlin
Rösch A (2004) Error estimates for parabolic optimal control problems with control constraints. Z Anal Anwend 23:353–376
Sun T, Ge L, Liu W (2013) Equivalent a posteriori error estimates for a constrained optimal control problem governed by parabolic equations. Int J Numer Anal Model 10:1–23
Tang Y, Chen Y (2012a) Recovery type a posteriori error estimates of fully discrete finite element methods for general convex parabolic optimal control problems. Numer Math Theoret Math Appl 5:573–591
Tang Y, Chen Y (2012b) Variational discretization for optimal parabolic optimal control problems with control constraints. J Syst Sci Complex 25:880–895
Tang Y, Hua Y (2014) Elliptic reconstruction and a posteriori error estimates for parabolic optimal control problems. J Appl Anal Comput 4:295–306
Tiba D (1995) Lectures on the optimal control of elliptic equations. University of Jyväskylä, Department of Mathematics
Wheeler MF (1973) A priori \(L^2\)-error estimates for Galerkin approximations to parabolic partial differential equations. SIAM J Numer Anal 10:723–759
Winther R (1978) Error estimates for a Galerkin approximation of a parabolic control problem. Ann. Mat. Pura Appl. 117:173–206
Xiong C, Li Y (2011) A posteriori error estimates for optimal distributed control governed by the evaluation equations. Appl Numer Math 61:181–200
Acknowledgements
The authors would like to thank the anonymous referees for their valuable comments and constructive suggestions, which greatly improved the contents of this article.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Frederic Valentin.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Manohar, R., Sinha, R.K. A posteriori \(L^{\infty }(L^{\infty })\)-error estimates for finite-element approximations to parabolic optimal control problems. Comp. Appl. Math. 40, 298 (2021). https://doi.org/10.1007/s40314-021-01682-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-021-01682-5
Keywords
- Parabolic optimal control problem
- Variational discretization
- Backward-Euler scheme
- Elliptic reconstruction
- Maximum norm error estimates
- A posteriori error estimates