
Abstract
In the present research article, we used a new numerical technique called Chebyshev wavelet method for the numerical solutions of fractional delay differential equations. The Caputo operator is used to define fractional derivatives. The numerical results illustrate the accuracy and reliability of the proposed method. Some numerical examples presented which have shown that the computational study completely supports the compatibility of the suggested method. Similarly, a proposed algorithm can also be applied for other physical problems.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In nature, many physical are modeled with the help of differential equations. Some of these problems are more complex and cannot be modeled by simple differential equations. For these complex and non-local issues, the researchers have developed a new technique which is known as Fractional Differential Equations (FDEs).
FDEs have achieved the attraction of scientists, due to its numerous applications in real-life sciences and engineering problems, such as electrolyte polarization (Deng and Li 2005), electrochemistry of corrosion (Oldham 1983), optics and signal processing (Baskin and Iomin 2013), electro-thermo elasticity (Machado et al. 2011), circuit systems (Hartley et al. 1995), diffusion wave (Bhrawy and Zaky 2015), heat conduction (Povstenko 2009) fluid flow (Kulish and Lage 2002; Mainardi 1997), probability and statistics (Kilbas et al. 2006; Bapna and Mathur 2012), and control theory of dynamical systems (Rossikhin and Shitikova 1997).
The Delay Differential Equations (DDEs) have the numerous properties everywhere, particularly, Fractional Differential Equations (FDEs) with delay argument are interesting topics for its applications in certain processes and systems in engineering and other sciences (Kuang et al. 1993a; b; Smith 2011; Ruan and Wei 2003; Hartung et al. 2006; Shakeri and Dehghan 2008; Yi et al. 2007). For modeling, FDDEs have gained more attention of the mathematicians for modeling as compared to simple ODEs, because a little delay has great impact. FDDEs are used in many areas of mathematics, such as infectious diseases, navigation prediction, population dynamics, circulating blood, the body reaction to carbon dioxide Deng and Li (2005); Oldham (1983); Baskin and Iomin (2013); Machado et al. (2011); Hartley et al. (1995); Bhrawy and Zaky (2015), and some other applications in advance research studies (Hethcote 2000; Arimoto et al. 1984; Podlubny 1998; Obata et al. 2004; Tarasov 2010; Kajiwara et al. 2012; Nelson et al. 2000; Zhu and Zou 2008).
The intensive focus of the researchers is to find the numerical solutions of FDDEs, because there is a no specific algorithm for analytical or exact solution of every FDDEs. Different techniques have been developed for the numerical solutions for these problems. The most common among these methods are Homotopy Perturbation Method (HPM) (Shakeri and Dehghan 2008), New Predictor Corrector Method (NPCM) (Bhalekar and Daftardar-Gejji 2011), Variation Iteration Method (VIM) (Chen and Wang 2010), Legendre Pseudospectral Method (LPSM) (Khader and Hendy 2012), Hermit Wavelet Method (HWM) (Saeed 2014), LMS Method (LMSM) (Engelborghs and Roose 2002), Runge Kutta-Type Methods (RKM) (Wang 2013), Adams–Bashforth–Moulton Algorithm (ABMA) (Wang 2013), Bernoulli Wavelet Method (BWM) (Rahimkhani et al. 2017), Extend Predictor Corrector Method (EPCM) (Moghaddam et al. 2016), Kernal Method (KM) (Xu and Lin 2016), GL Definition (GL) (Wang et al. 2013) , Gegenbauer Wavelet Method (GWM), and Adomian Decomposition Method (ADM) (Saeedi and Mohseni Moghadam 2011) have been used for the numerical and analytical solutions of FDDEs.
Some latest techniques for solving nonlinear and linear fractional partial differential equations are mentioned (Tariq et al. 2018; Rezazadeh et al. Rezazadeh et al. 2018, 2019; Ghanbari et al. 2019; Arqub and Al-Smadi 2018; Arqub and Maayah 2018; Osman et al. 2018; Osman 2017; Abu Arqub and Al-Smadi 2018; Abu Arqub 2018).
In current research work, CWM is extended for the numerical solutions of FDDEs. CWM solutions are calculated at different fractional-order \(\alpha \) which shows that the fractional-order solutions are convergent to integer order solutions. M.H. Heydari et al. have discussed the uniform and stability of the solution obtained by CWM (Heydari et al. 2013). The solutions of the suggested techniques are contrasted with the Kernel Hilbert Space Method (KHSM) approaches (Ghasemi et al. 2015), Haar Wavelet Method (HWM) (Hsiao 1997), Modified Legendre Wavelet Method (MLWM) (Hafshejani et al. 2011), GL Method (GLM) (Wang et al. 2013), and Spline Polynomial (SP) (Ramadan et al. 2006). The comparison shows that CWM has a better level of precision comparison to all other techniques described (Tables 1, 2, 3, 4, 5, 6, 7, 8, 9, 10).
2 Preliminaries’ concepts
In this section, we present some fundamental needed definitions and preliminary ideas linked to fractional calculus, which are used in this current research.
2.1 Caputo operator with fractional derivatives
2.2 Chebyshev wavelet properties
The Chebyshev wavelet develops relatives of components from expansion or conversion of particular function \(\psi (t)\) called mother wavelet. The second kind of Chebyshev polynomial consists of four factors \( \iota , \ell , k, t \), \( as \ \ \psi (t)=\psi (\iota ,\ell ,k,t),\) which is defined in the interval [0,1] as:
where
and \( P_\ell (t)\) is called Chebyshev polynomial which is calculated as:
where
2.3 Lemma 1: Khan et al. (2019)
While the Chebyshev wavelet expansion of a z(t) continuous variable converges evenly, the Chebyshev Wavelet algorithm converges to z(t).
2.4 Lemma 2: Heydari et al. (2014)
A function \(z(t)\in L_2[0,1],\) having defined the second-order derivative, z(t) can be extended in the following convergent series:
3 Chebyshev wavelet approximation
Consider the general fractional-order differential equation:
where \( \rho , c > 0\), is constant delay. CWM approximation is defined as:
and \( \psi _{\dot{\iota },\ell }(t) \) is calculated as:
where
\( P_\ell (t)\) is defined recursively as:
while
To reduce the series of CWM approximation for \( \dot{\iota }=1,2,\cdots , 2^{k-1} and \ \ \ell =0,1,\cdots , M-1, \) Eq. (7) become
Using Eq. (11) and caputo derivatives on real delay problems in Eq. (6):
Some equations are obtained using initial and boundary conditions in approximation as:
Equation (12) has become for distinct value of \(t = t_i\):
where \(t_i \) is calculated as:
Thus, Eqs. (13), (14), and (15) make differential equation scheme and determine the unidentified variables \( \beta _{\dot{\iota },\ell } \). I solved the resultant system using maple software, which provide CWM solution for the given problem.
4 Numerical representation
We considered some numerical examples to implement the new algorithm for numerical solution. The fractional delay problems are solved and the results obtained will be compared with the other techniques.
Example 5.1
Consider the linear FDDEs:
the initial condition is:
where
exact result is

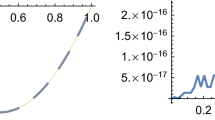
Error plot at distinct fractional-order \(\alpha \), for Example 5.1
Foot Note 1:
In Fig 1, the CWM absolute error at different fractional-order \( \alpha \) for Example 5.1 is given. It is cleared that when fractional order approaches to the given fractional order of the problem than the CWM error converges to zero.
Example 5.2
Consider the following linear FDDEs:
subjected to boundary conditions
the analytical solution for \( t\ge 0, \) is:

Error plot at distinct fractional-order \(\alpha \), for Example 5.2
Foot Note 2:
In Fig. 2, the absolute error of the CWM at different fractional-order \(\alpha \) for Example 5.2 is presented. The absolute error has shown that the CWM error is faster converging to zero when \( \alpha \) approaches to given order.
Example 5.3
Consider the following FDDEs:
with the initial conditions
the exact result of the given equation is:

Error plot at distinct fractional-order \(\alpha \), for Example 5.3
Foot Note 3:
In Fig. 3, the absolute error of CWM at different fractional-order \( \alpha \) of Example 5.3 is given. It is clear that when fractional order approaches to integer order than error approaches to zero.
Example 5.4
Consider the following FDDEs:
The exact solution for \( \beta =0.9, \) and \(\rho = 0.01e^{-t}\) is \( z(t)=t^2-t. \)

Error plot at distinct fractional-order \(\alpha \), for Example 5.4
Foot Note 4:
In Fig. 4, the absolute error of CWM at different fractional-order \( \alpha \) for Example 5.4 is presented. It is cleared that when fractional order approaches to integer order than the error approaches to zero.
Example 5.5
Consider the following FDDEs:
with the initial condition is
the exact result of the given problem as:

Error plot at distinct fractional-order \(\alpha \), for Example 5.5
Foot Note 5:
In Fig. 5, the absolute error of CWM at different fractional-order \(\alpha \) for Example 5.2 is presented. The absolute error has shown that CWM solution is faster converging to exact solution for the problem.
5 Conclusion
In this article, we have used a new numerical technique called Chebyshev wavelet Method for the solution of FDDEs. The key benefits of the proposed method are its low-cost computing, small CPU time, and simple to implement. Also the present method has the ability to convert the given problem into system of mathematical equations, which can be solved easily using MAPLE software. Moreover, CWM has the highest accuracy as compared to other numerical methods. In this connection, CWM results are compared with the numerical results of other methods, such as KHSM, HWM, MLWM, GLM, and SP. Based on the above facts, CWM can be easily be extended to other fractional delay or non-delay models in engineering and real-life sciences.
References
Abu Arqub O (2018) Solutions of time-fractional Tricomi and Keldysh equations of Dirichlet functions types in Hilbert space. Numer Methods Partial Differ Equ 34(5):1759–1780
Abu Arqub O, Al-Smadi M (2018) Numerical algorithm for solving time-fractional partial integrodifferential equations subject to initial and Dirichlet boundary conditions. Numer Methods Partial Differ Equ 34(5):1577–1597
Arimoto S, Kawamura S, Miyazaki F (1984) Bettering operation of robots by learning. J Rob Syst 1(2):123–140
Arqub OA, Al-Smadi M (2018) Atangana-Baleanu fractional approach to the solutions of Bagley-Torvik and Painlevé equations in Hilbert space. Chaos Solitons Fractals 117:161–167
Arqub OA, Maayah B (2018) Numerical solutions of integrodifferential equations of Fredholm operator type in the sense of the Atangana-Baleanu fractional operator. Chaos Solitons Fractals 117:117–124
Bapna IB, Mathur N (2012) Application of fractional calculus in statistics. Int. J. Contemp. Math. Sci. 7(18):849–856
Baskin E, Iomin A (2013) Electro-chemical manifestation of nanoplasmonics in fractal media. Open Phys. 11(6):676–684
Bhalekar S, Daftardar-Gejji V (2011) A predictor-corrector scheme for solving nonlinear delay differential equations of fractional order. J. Fract. Calc. Appl. 1(5):1–9
Bhrawy AH, Zaky MA (2015) A method based on the Jacobi tau approximation for solving multi-term time-space fractional partial differential equations. J. Comput. Phys. 281:876–895
Chen X, Wang L (2010) The variational iteration method for solving a neutral functional-differential equation with proportional delays. Comput. Mathe. Appl. 59(8):2696–2702
Deng WH, Li CP (2005) Chaos synchronization of the fractional Lü system. Phys. A 353:61–72
Engelborghs K, Roose D (2002) On stability of LMS methods and characteristic roots of delay differential equations. SIAM J. Numer. Anal. 40(2):629–650
Ghanbari B, Yusuf A, Baleanu D (2019) The new exact solitary wave solutions and stability analysis for the (2+ 1) \((2+ 1) \)-dimensional Zakharov-Kuznetsov equation. Adv. Differ. Equ. 2019(1):49
Ghasemi M, Fardi M, Ghaziani RK (2015) Numerical solution of nonlinear delay differential equations of fractional order in reproducing kernel Hilbert space. Appl. Math. Comput. 268:815–831
Hafshejani MS, Vanani SK, Hafshejani JS (2011) Numerical solution of delay differential equations using Legendre wavelet method. World Appl. Sci. J. 13:27–33
Hartley TT, Lorenzo CF, Qammer HK (1995) Chaos in a fractional order Chua’s system. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 42(8):485–490
Hartung F, Krisztin T, Walther HO, Wu J (2006) Functional differential equations with state-dependent delays: theory and applications. In: Handbook of differential equations: ordinary differential equations, vol 3. North-Holland, pp 435–545
Hethcote HW (2000) The mathematics of infectious diseases. SIAM Rev. 42(4):599–653
Heydari MH, Hooshmandasl MR, Maalek Ghaini FM, Li M (2013) Chebyshev wavelets method for solution of nonlinear fractional integrodifferential equations in a large interval. Adv. Math. Phys. 2013:482083
Heydari MH, Hooshmandasl MR, Ghaini FM (2014) A new approach of the Chebyshev wavelets method for partial differential equations with boundary conditions of the telegraph type. Appl. Math. Modelling 38(5–6):1597–1606
Hsiao CH (1997) State analysis of linear time delayed systems via Haar wavelets. Math. Comput. Simul. 44(5):457–470
Kajiwara T, Saraki T, Takeuchi Y (2012) Construction of lyapunov functionals for delay differential equations in virology and epidemiology. Nonlinear Anal. 13:1802–1826
Khader MM, Hendy AS (2012) The approximate and exact solutions of the fractional-order delay differential equations using Legendre seudospectral method. Int. J. Pure Appl. Math. 74(3):287–297
Khan H, Arif M, Mohyud-Din ST (2019) Numerical solution of fractional boundary value problems by using chebyshev wavelet. Matrix Sci. Math. (MSMK) 3(1):13–16
Kilbas AAA, Srivastava HM, Trujillo JJ (2006) Theory and Applications of Fractional Differential Equations, vol 204. Elsevier Science Limited, Bucharest
Kuang Y (ed) (1993) Delay Differential Equations. Academic Press, Boston
Kuang Y (ed) (1993) Delay differential equations: with applications in population dynamics, vol 191. Academic Press, Cambridge
Kulish VV, Lage JL (2002) Application of fractional calculus to fluid mechanics. J. Fluids Eng. 124(3):803–806
Machado JT, Kiryakova V, Mainardi F (2011) Recent history of fractional calculus. Commun. Nonlinear Sci. Numer. Simul. 16(3):1140–1153
Maindadi F (1997) Fractional Calculus. In Fractals and Fractional Calculus in Continuum Mechanics. Springer, Vienna, pp 291–348
Moghaddam BP, Yaghoobi S, Machado JT (2016) An extended predictor-corrector algorithm for variable-order fractional delay differential equations. J. Comput. Nonlinear Dyn. 11(6):061001
Nelson PW, Murray JD, Perelson AS (2000) A model of HIV-1 pathogenesis that includes an intracellular delay. Math. Biosci. 163:201–215
Obata T, Liu TT, Miller KL, Luh WM, Wong EC, Frank LR, Buxton RB (2004) Discrepancies between BOLD and flow dynamics in primary and supplementary motor areas: application of the balloon model to the interpretation of BOLD transients. NeuroImage 21(1):144–153
Oldham KB (1983) The reformulation of an infinite sum via semiintegration. SIAM J. Math. Anal. 14(5):974–981
Osman MS (2017) Multiwave solutions of time-fractional (2+ 1)-dimensional Nizhnik–Novikov–Veselov equations. Pramana 88(4):67
Osman MS, Korkmaz A, Rezazadeh H, Mirzazadeh M, Eslami M, Zhou Q (2018) The unified method for conformable time fractional Schrodinger equation with perturbation terms. Chin. J. Phys. 56(5):2500–2506
Podlubny I (1998) Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications, vol 198. Elsevier, Amsterdam
Povstenko YZ (2009) Thermoelasticity that uses fractional heat conduction equation. J. Math. Sci. 162(2):296–305
Rahimkhani P, Ordokhani Y, Babolian E (2017) A new operational matrix based on Bernoulli wavelets for solving fractional delay differential equations. Numer. Algorithms 74(1):223–245
Ramadan MA, El-Sherbeiny AEA, Sherif MN (2006) Numerical solution of system of first-order delay differential equations using polynomial spline functions. Int. J. Comput. Math. 83(12):925–937
Rezazadeh H, Osman MS, Eslami M, Ekici M, Sonmezoglu A, Asma M, Othman WAM et al (2018) Mitigating Internet bottleneck with fractional temporal evolution of optical solitons having quadratic-cubic nonlinearity. Optik 164:84–92
Rezazadeh H, Osman MS, Eslami M, Mirzazadeh M, Zhou Q, Badri SA, Korkmaz A (2019) Hyperbolic rational solutions to a variety of conformable fractional Boussinesq-Like equations. Nonlinear Eng. 8(1):224–230
Rossikhin YA, Shitikova MV (1997) Applications of fractional calculus to dynamic problems of linear and nonlinear hereditary mechanics of solids. Appl. Mech. Rev. 50(1):15–67
Ruan S, Wei J (2003) On the zeros of transcendental functions with applications to stability of delay differential equations with two delays. Dyn. Contin. Discrete Impulsive Syst. Ser. A 10:863–874
Saeed U (2014) Hermite wavelet method for fractional delay differential equations. J. Differ. Equ. 2014:359093
Saeedi H, Mohseni Moghadam M (2011) Numerical solution of nonlinear Volterra integro-differential equations of arbitrary order by CAS wavelets. Appl. Math. Comput. 16:1216–1226
Shakeri F, Dehghan M (2008) Solution of delay differential equations via a homotopy perturbation method. Math. Comput. Modelling 48(3–4):486–498
Smith HL (2011) An introduction to delay differential equations with applications to the life sciences, vol 57. Springer, New York
Tarasov VE (2010) Fractional Dynamics: Application of Fractional Calculus to Dynamics of Particles, Fields and Media, Springer. Heidelberg. Higher Education Press, Beijing
Tariq KU, Younis M, Rezazadeh H, Rizvi STR, Osman MS (2018) Optical solitons with quadratic-cubic nonlinearity and fractional temporal evolution. Modern Phys. Lett. B 32(26):1850317
Wang Z (2013) A numerical method for delayed fractional-order differential equations. J. Appl. Math. 219:4590–4600
Wang W (2013) Stability of solutions of nonlinear neutral differential equations with piecewise constant delay and their discretizations. Appl. Math. Comput. 2013:256071
Wang Z, Huang X, Zhou J (2013) A numerical method for delayed fractional-order differential equations: based on GL definition. Appl. Math. Inf. Sci 7(2):525–529
Xu MQ, Lin YZ (2016) Simplified reproducing kernel method for fractional differential equations with delay. Appl. Math. Lett. 52:156–161
Yi S, Nelson P, Ulsoy A (2007) Delay differential equations via the matrix Lambert W function and bifurcation analysis: application to machine tool chatter. Math. Biosci. Eng. 4(2):355
Zhu H, Zou X (2008) Impact of delays in cell infection and virus production on HIV-1 dynamics. Math. Medic. Bio. 25:99–112
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by José Tenreiro Machado.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Farooq, U., Khan, H., Baleanu, D. et al. Numerical solutions of fractional delay differential equations using Chebyshev wavelet method. Comp. Appl. Math. 38, 195 (2019). https://doi.org/10.1007/s40314-019-0953-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-019-0953-y