
Abstract
In the present paper, a new orthonormal wavelet basis, called Chelyshkov wavelet, is constructed from a class of orthonormal polynomials. These wavelet basis and their properties are utilized to obtain their operational matrix of fractional integration in the Riemann–Liouville sense and delay operational matrix. Convergence and error bound of the expansion by this kind of wavelet functions are investigated. Then, these operational matrices along with the Galerkin approach have been implemented to solve systems of fractional delay differential equations (SFDDEs). The main superiority of the proposed technique is that it reduces SFDDEs to a system of algebraic equations. Moreover, accuracy and efficiency of the suggested Chelyshkov wavelet approach are verified through some linear and nonlinear SFDDEs. Finally, the obtained numerical results are compared with those previously reported in the literature.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
It has been found that integer-order calculus is not an appropriate tool for modeling complex systems in science and engineering. The non-integer order differentiation and integration, which is known as fractional calculus, has been recently applied to model many fundamental problems in science and engineering (Oldham and Spanier 1974; Podlubny 1998; Samko et al. 1993). Recently, fractional functional equations have found many applications in various fields of engineering and physics such as colored noise, signal processing, electromagnetism, electrochemistry, continuum and statistical mechanics, solid mechanics and fluid-dynamic traffic and viscoelasticity (Baleanu et al. 2016; Dehghan et al. 2017; Cattani et al. 2017; Srivastava et al. 2017). Therefore, there has been a remarkable attention paid to approximate solution of fractional differential and integral equations (Mohammadi and Ciancio 2017; Jajarmi and Baleanu 2017; Heydari et al. 2017; Mardani et al. 2017).
Recently, delay differential equations (DDEs) have been frequently applied for analysis and predictions in different areas of science and engineering such as economy, control, biology, electrodynamics, medicine and chemistry (Walter et al. 1992; Kuang 1993; Malek-Zavarei and Jamshidi 1987). Contrary to ordinary differential equations (ODEs), DDEs allow the inclusion of former state into mathematical models, thus making it more closer to the real-world phenomenon. Because of these important applications, many researches have been focused on DDEs and their numerical solution. For example, Adams–Bashforth–Moulton method (Wang 2013), Adomian decomposition method (Evans and Raslan 2005), variational iteration method (Yu 2008), hybrid functions (Marzban and Razzaghi 2006), polynomial spectral methods (Hwang and Chen 1986; Ali et al. 2009; Sedaghat et al. 2012; Yang and Huang 2013; Khader and Hendy 2012; Tohidi et al. 2012; Davaeifar and Rashidinia 2017), wavelet methods (Ghasemi and Tavassoli 2011; Sedighi Hafshejani et al. 2011; Saeed and Rehman 2014; Rahimkhani et al. 2017), Laplace transform (Widatalla et al. 2012) and optimal perturbation method (Bildik and Deniz 2017) have been employed to solve DDEs.
Over the last two decades, orthogonal functions and spectral methods have received great attention and became an important tool for solving differential and integral equations. According to structure of orthogonal functions, they are usually classified into main three families: piecewise constant functions (Haar, Walsh, block-pulse, etc.), orthogonal polynomials (Legendre, Chebyshev, Laguerre, etc.) and trigonometric functions (Mohammadi 2016a; Mohammadi and Ciancio 2017; Heydari et al. 2017; Marzban and Razzaghi 2006). In spite of the fact that trigonometric functions and orthogonal polynomials have good convergence behaviour for numerical solution of differential and integral equations, their application to problems with non-analytical solution or coefficients, involves some deficiency. Furthermore, expanding a continuous function with piecewise functions results in a piecewise constant function. Orthogonal wavelet is a special type of orthogonal functions with compact support and ability to represent functions at different levels of resolution. Wavelets have been applied in a wide range of science and engineering fields. For instance, wavelets found many applications in numerical analysis, waveform representation, signal analysis, optimal control and time–frequency analysis (Mohammadi 2016a, b; Rahimkhani et al. 2017).
The main aim of this study is to construct a new kind of orthonormal wavelet basis, called Chelyshkov wavelet, using the Chelyshkov orthogonal polynomials. Some operational matrices for these wavelet functions are introduced and their general formulation will be presented. By using these orthogonal wavelet functions and their operational matrices, an efficient Galerkin method is proposed to approximate solution of SFDDEs. The obtained numerical results illustrate that the presented wavelet method is more efficient and accurate than other existing methods.
The structure of this paper is organized as follows: In Sect. 2, some introductory definitions of fractional derivatives and integrals are presented. Section 3 is devoted to the Chelyshkov wavelet and their properties. Convergence and error bound of the Chelyshkov wavelets expansion are provided in Sect. 4. The operational matrix of fractional integration and delay operational matrix for the Chelyshkov wavelet basis have been derived in Sect. 5. In Sect. 6, an efficient wavelet Galerkin method is proposed to solve SFDDEs. Some illustrative examples are given in Sect. 7. Eventually, some concluding remarks are drawn in Sect. 8.
2 Preliminary remarks on fractional calculus
Fractional order calculus deals with the non-integer order differentiation and integration. Although the fractional order operators enable to model a wider class of problems, there is not a unique definition of fractional derivative. The most customarily used definitions for fractional integral and derivative are the Riemann–Liouville and Caputo definitions, which can be defined as follows (Podlubny 1998):
Definition 1
The Riemann–Liouville fractional integration of order \(\nu \ge 0\) may be defined as:
The following properties of the Riemann–Liouville fractional integral operator \(I^\nu \) can be easily verified:
Definition 2
For a real number \(\nu >0\), the Caputo fractional derivative \({\mathcal {D}}^{\nu }\) is defined as:
where n is an integer, \(t>0\).
Some practical and useful properties of the Caputo fractional operator \({\mathcal {D}}^{\nu }\) can be provided in the following expressions:
For more details on the fractional derivatives and integrals, the interested reader is referred to Podlubny (1998) and Oldham and Spanier (1974).
3 Chelyshkov wavelets
The main aim of the current section is to construct the Chelyshkov wavelet basis. First, we introduce some useful properties of the Chelyshkov polynomials which are given in Chelyshkov (2006) and Gokmen et al. (2017). Then, the Chelyshkov wavelet will be constructed using the Chelyshkov polynomials and their properties.
3.1 Basic definition of Chelyshkov polynomials
The Chelyshkov polynomials are one of the latest classes of orthogonal polynomials introduced by Chelyshkov (2006) and Gokmen et al. (2017). The Chelyshkov polynomials are explicitly defined by
in which
These polynomials are orthogonal over the interval [0, 1] with respect to the weight function \(w(t)=1\) and
where \(\delta _{mn}\) is Kronecker delta. Furthermore, these polynomials may be derived with the aid of the Rodrigues’ formula as:
According to definition of the Chelyshkov polynomials, it is clear that for a fixed integer number M, the functions \({\rho _{n,M}(t)},n=0,1,\ldots ,M\) are polynomials exactly of degree M. This may be the key difference between the Chelyshkov polynomials and other typical orthogonal polynomials in the interval [0, 1], such as shifted Legendre polynomials (Mohammadi and Hosseini 2011), shifted Chebyshev polynomials (Bhrawy and Alofi 2013) and shifted Chebyshev polynomial of the second kind (Mohammadi 2016c), where the kth polynomial has degree k. The graph of shifted Chebyshev polynomials, shifted Legendre polynomials, shifted Chebyshev polynomial of the second kind and Chelyshkov polynomials for \(M=4\) is plotted in Fig. 1. It is worth mentioning that the Chelyshkov polynomials are orthogonal with respect to the weight \(w(t)=1\). Therefore, their application to approximate solution of functional equations is more efficient and reliable in comparison to the Chebyshev polynomial of the second kind and shifted Chebyshev polynomials. Any integrable function f(t) on the interval [0, 1) could be expressed by Chelyshkov polynomials as:
where B and \(\Phi (x)\) are \((M+1)\) vectors given by
and

The graph of orthogonal polynomials in the interval [0, 1]. a The Chelyshkov polynomials, b the shifted Legendre polynomials, c the shifted Chebyshev polynomials, d the shifted Chebyshev polynomial of the second kind
3.2 Construction of Chelyshkov wavelets
Wavelets are a set of functions which can be defined from dilation and translation of a mother wavelet function \(\psi \). As the dilation and translation parameters vary continuously, we have a family of continuous wavelets functions (Mohammadi and Ciancio 2017; Rahimkhani et al. 2017). The Chelyshkov wavelets \(\psi _{nm} (x)\) are defined on the interval [0, 1) by
where \(n=0,1,\ldots ,2^{k}-1\) and \(m=0,1,\ldots ,M\) and \({\rho _{m,M}(t)}\) are the Chelyshkov polynomials of degree m defined in (1). The set of Chelyshkov wavelets \(\psi _{nm}(t),n=0,1,\ldots ,2^{k}-1, m=0,1,\ldots ,M\) constitutes an orthonormal set on the interval [0, 1]. For \(M=3\) and \(k=1\), the set of Chelyshkov wavelets \(\psi _{nm}(t),n=0,1, m=0,1, 3\) can be derived as:
Based on definition of the Chelyshkov wavelet, it is clear that the wavelet \(\psi _{nm}(t)\) is a polynomial of degree M over the interval \([{\frac{n}{{2^k }},\frac{{n + 1}}{{2^k }}})\). Moreover, any square-integrable function f(t) over [0, 1) can be expressed with the aid of Chelyshkov wavelets as:
where C and \(\Psi (t)\) are \({\hat{m}}=2^{k}(M+1)\) vectors given as:
and
The expansion (7) may be rewritten as:
where
and
4 Convergence analysis
In this section, some theorems on convergence and error bound of the Chelyshkov polynomials and wavelets expansion have been presented. Hereafter, \(\Vert . \Vert _{2}\) denotes the \(L^{2}[0, 1]\) norm defined by
Theorem 4.1
Let \(f(t) \in C^{m+1}[0, 1]\) is expanded with the aid of the Chelshkov polynomials as :
then
where \(L = \max _{t \in [0,1]}|{f^{(M + 1)} (t)}|.\)
Proof
Let the polynomial q(t) be defined as:
using the Taylor expansion, there exists \(\xi \in (0,1)\) such that
Now, making use of the best approximation property of \(f_{M}(t)\) (Kreyszig 1978), we get
so the proof will be completed by taking the square root of both sides of this inequality. \(\square \)
Theorem 4.2
Assume that \(f(t) \in C^{m+1}[0, 1]\) is an arbitrary function approximated by the Chelshkov wavelet series as
then we have
Proof
According to the definition of \(f_{{{\hat{m}}}} (t)\), we have
using the change of variable \(z=2^{k}t-n\) in \(2^{k}\) terms of above relation, we get
in which \(g_{n}(z)=\frac{1}{{\sqrt{2m + 1} }}f( {\frac{{z + n}}{{2^k }}})\) and \(g_{n,M}(z)\) is its Chelshkov polynomial approximation. Now, make the use of Theorem 4.1 for the functions \(g_{n}(z), n=0,1,\ldots ,2^{k}-1\), we have
\(\square \)
Theorem 4.3
Let the Chelshkov wavelet expansion of an arbitrary continuous function f(t) converges uniformly. Thus, this expansion converges to f(t).
Proof
Consider the Chelshkov wavelet expansion of f(t) as follows:
where \({c_{nm}} = {\langle {{\psi _{nm}}(t), f(t)} \rangle }\). For fixed values i and j multiplying both sides of above relation by \(\psi _{ij}(t)\) and then integrating on [0, 1], we have
therefore, the functions f(t) and \({\tilde{f}}(t)\) have equal Chelshkov wavelet expansions and accordingly \( f(t)= {\tilde{f}}(t)\) for \(t \in [0,1]\). \(\square \)
5 Transformation and operational matrices
This section is devoted to operational matrices of the Chelyshkov wavelets vector \(\Psi (t)\). First, two operational matrices for the Chelyshkov polynomials vector \(\Phi (t)\) are derived. Then, transformation matrices for the Chelyshkov polynomial vector \(\Phi (t)\) and Chelyshkov wavelet vector \(\Psi (t)\) will be obtained. Finally, using these transformation matrices, the operational matrix of fractional integration and delay operational matrix of the Chelyshkov wavelet vector \(\Psi (t)\) will be derived.
Theorem 5.1
Let \(\Phi (t)\) be the \((M+1)\) Chelyshkov polynomials vector as defined in relation (4). Its fractional integral of order \(\alpha \) can be expressed as :
where \( \Theta ^{(\alpha )}\) is an \((M+1)\) matrix and its (i, j)th component may be derived as :
Proof
The ith element of the Chelyshkov polynomials vector \(\Phi (t)\) is \(\rho _{i-1}(t)\) and its fractional integral of order \(\alpha \) could be derived as:
by expanding the term \(t^{\alpha +r +i-1 }\) by the Chelyshkov polynomials, we get
in which \(\beta _{r, j}\) can be obtained as:
Now, by inserting (16) and (17) in (15), we get
and this leads to the desired results. \(\square \)
Theorem 5.2
Suppose \(\Phi (t)\) is the \((M+1)\) Chelshkov polynomial vector defined in (4). The delay operational matrix of this vector will be derived as :
where \(\Omega {(\tau )}\) is the \((M+1) \times (M+1)\) delay matrix and its (i, j)th element can be obtained as:
Proof
Consider the ith element of \(\Phi (t)\), which is \(\rho _{i-1}(t)\). Using the analytic form of \(\rho _{i-1}(t)\) as defined in (1), we get
now, by expanding the term \(t^{r+i-1}\) by the Chelyshkov polynomials we have
in which \(\beta _{r,j}\) can be derived as:
Making use of the relations (20)–(22), we get
this relation together with (18) get the desired results. \(\square \)
In the next theorems, two transformation matrices for the Chelyshkov polynomials and Chelyshkov wavelet vectors \(\Phi (t)\) and \(\Psi (t)\) will be derived. Using these transformation matrices, these vectors can be expanded into each other which is a critical property for next results.
Theorem 5.3
The \({\hat{m}}\) Chelyshkov wavelet vector \(\Psi (x)\) can be expanded into the \((M+1)\) Chelyshkov polynomials vector \(\Phi (x)\) as
where \(\Lambda \) is a \({\hat{m}} \times (M+1)\) matrix and
in which \(i=1\ldots {\hat{m}},j=1,\ldots ,M+1\).
Proof
The ith component of the Chelyshkov wavelets vector \(\Psi (t)\), namely \(\psi _{i}(t)\), can be defined by Chelyshkov polynomials as:
in which the coefficient \(\Lambda _{ij}\) can be obtained as:
Substituting the analytical form of the \(\rho _{j}(t)\) from the Eq. (1), the coefficient \(\Lambda _{ij}\) can be derived as:
where \(i=n(M+1)+m+1\). Now, by change of variable \(z=2^{k}t - n\) we get
and this completes the proof. \(\square \)
Theorem 5.4
Let \(\Phi (t)\) be the \((M+1)\) Chelyshkov polynomials vector. It can be expanded by the Chelyshkov wavelets as :
where \(\Pi \) is \((M+1) \times {\hat{m}}\) matrix and
Proof
Consider the ith component of the vector \(\Phi (t)\), which is \(\rho _{i-1}(t)\). It can be expanded by the Chelyshkov wavelets as follows:
in which
where \(j=n(M+1)+m+1\). By change of variable \(z={2^{k}t-n}\) in the above relation, we get
and this completes the proof. \(\square \)
In the next theorems, the operational matrices \(\Omega {(\tau )}\) and \(\Theta ^{(\alpha )}\) for the Chelyshkov polynomials vector \(\Phi (t)\) together with transformations matrices \(\Pi \) and \(\Lambda \) are used to derive fractional-order integration matrix and delay operational matrix of the Chelyshkov wavelet vector \(\Phi (t)\).
Theorem 5.5
Let \(\Psi (x)\) be the Chelyshkov wavelets vector defined as defined in (9). The Riemann–Liouville fractional integral of order \(\alpha \) for this \(\Psi (x)\) can be obtained as :
where \(P^{(\alpha )}=\Lambda \Theta ^{(\alpha )} \Pi \) is a \({\hat{m}}\times {\hat{m}}\) matrix, and \(\Pi \) and \(\Lambda \) are transformation matrices derived in (24) and (14). Moreover, \(\Theta ^{(\alpha )}\) is the fractional operational matrix for the Chelyshkov polynomial vector \(\Psi (t)\) defined in (14).
Proof
Consider the Chelyshkov wavelet vector \(\Psi (x)\). Using the transformation matrix \(\Lambda \), it can be written as:
by applying the fractional integration operator \(I^{\alpha }\) and using (14), we get
now the transformation matrix \(\Lambda \) results
which yields (26) and completes the proof. \(\square \)
Theorem 5.6
Let \(\Psi {(t)}\) be the \({\hat{m}} \times 1\) Chelyshkov wavelet vector defined in (9). The delay operational matrix of this wavelet vector may be expressed as :
where \({\mathcal {D}}(\tau ) =\Lambda \Omega (\tau ) \Pi \) is an \({\hat{m}}\) matrix, \(\Pi \) and \(\Lambda \) are the transformation matrices and \(\Omega (\tau )\) is the delay operational matrix of the Chelyshkov polynomial vector \(\Psi (t)\) defined in (18).
Proof
The proof is the same as the previous theorem. \(\square \)
6 Problem statement and numerical method
In this section, the Chelshkov wavelet basis and their operational matrices are used to approximate solution of SFDDEs. To this end, consider the following problems:
Problem (a):
Problem (b):
where \(i=1,2,\ldots ,n\), \(m-1< \alpha \le m\) and \(0< \tau _{is} <1, s=1,2,\ldots ,r_{i}\) are delay parameters, \(\lambda _{ik}\) are initial conditions and \(u_{i}(t), i=1, 2,\ldots , n\) are given continuous functions in the Problem (a). Furthermore, \(D^{\alpha }{y_{i}(t)}\) denote the fractional order derivative in the Caputo sense and \(y_{i}(t)\) are solution functions to be determined. To derive approximate solution of SFDDEs (a) and (b), we approximate \(D^{\alpha }{y_{i}(t)}\) by the Chelshkov wavelets as follows:
by applying the fractional-order Riemann–Liouville operator \(I^{\alpha }\) on both sides of these relations and applying the fractional-order operational matrix of the Chelshkov wavelet derived in (4), we have
where \(d_{i}\) is the Chelshkov wavelet coefficient vector of the polynomial \(\sum _{i = 0}^{m - 1} {\frac{{\lambda _{ik} }}{{i!}}t^i}\). Hence, for the Problem (a), we get
where \( C^{(\tau _{ij})}_{*}\) is an unknown vector function of the vector \(C_{i}\) and delay parameter \(\tau _{ij}\). Moreover, for the Problem (b), by employing the delay operational matrix of Chelshkov wavelet \(\Psi (t)\) derived in (30), we obtain
Now, by inserting (29)–(32) into the Problems (a) and (b), we obtain a system of residual function as follows:
Problem (a):
Problem (b):
Then, using the typical classical Galerkin approach we have \(n{\hat{m}}\) algebraic equations for n unknown coefficient vectors \(C_{i}, i=1,2,\ldots ,n\), as:
Problem (a):
Problem (b):
which can be solved using the Newton–Raphson method. By substituting the derived vector \(C_{i}, i=1,2,\ldots ,n\), in Eq. (30) the solution \(y_{i}(t), i=1,2,\ldots ,n\) can be derived for the Problems (a) and (b).
7 Numerical results
To verify applicability and efficiency of the suggested wavelet approach, some illustrative examples have been presented in this section. Numerical examples are considered in both linear and nonlinear cases. Let \(y_{i}(t)\) and \(y_{i,{\hat{m}}}(t)\) be the exact and approximate solution of the SFDDEs (27) and (28), respectively. The error function \(e_{i,{\hat{m}}}(t)=| {y_{i}(t)-y_{i,{\hat{m}}}(t)}|\) and the maximum absolute error \(\Vert e_{i,{\hat{m}}}(t)\Vert _\infty \) were computed to verify the accuracy of the obtained numerical results. In all examples, numerical computations are carried out using MAPLE 17 with 30 digits precision.

The relative error of approximate solutions for \(\alpha =1\) and \({\hat{m}}=32\) (Example 1). a \(y_{1}(t)\), b \(y_{2}(t)\)
Example 1
As first example, we consider the following SFDDEs (Hwang and Chen 1986; Ghasemi and Tavassoli 2011)
with
For \(\alpha =1\) and \(u(t)=1, t\ge 0\), the exact solutions of this system are
The solution of these SFDDEs has approximated by applying the presented Chelyshkov wavelet method. For \(\alpha =1\), by choosing \({\hat{m}}=32 (M=7, k=2)\) the exact solutions are derived up to 22 digits precision and their relative errors \(\frac{e_{i,{\hat{m}}}(t)}{\Vert e_{i,{\hat{m}}}(t) \Vert _\infty }\) are shown in Fig. 2. Moreover, the exact and approximate solutions for fractional-orders \(\alpha =0.8, 0.85, 0.90, 0.95, 1\) with \({\hat{m}}=32\) are plotted in Fig. 3. Based on the obtained results, it is clear that the proposed wavelet method is accurate for solving such problems and approximate solutions converge to the exact solution as \(\alpha \) approaches 1.

Numerical results for different values of \(\alpha \) and \({\hat{m}}=32\) (Example 1). a \(y_{1}(t)\), b \(y_{2}(t)\)
Example 2
Consider the following SFDDEs (Rahimkhani et al. 2017)
with
The exact solutions of this system for \(\alpha = 1\) and input function \(u(t)=2t+1, t\ge 0\), are
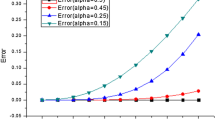
The proposed technique in Sect. 5 is implemented to solve these SFDDEs for different values of \(\alpha \). Figure 4 shows the exact and obtained approximate solutions for \(\alpha =0.6, 0.7, 0.8, 0.9, 1 \) with \({\hat{m}}=14\). Moreover, comparison of the absolute error of obtained numerical solutions with the presented results in Rahimkhani et al. (2017) is presented in Table 1. From these results, we can realize that the Chelyshkov wavelet method is more efficient in solving these SFDDEs and approximate solutions approach the exact solution as \(\alpha \) converges to 1.

Numerical results for different values of \(\alpha \) and \({\hat{m}}=14\) (Example 2). a \(y_{1}(t)\), b \(y_{2}(t)\)
Example 3
In this example, we consider a system of nonlinear pantograph delay differential equations as follows (Davaeifar and Rashidinia 2017):
in which the exact solutions for \(\alpha =1\) are \(y_{1}(t)=-\cos (t), y_{2}(t)=t\cos (t)\) and \(y_{3}(t)=\sin (t)\). Davaeifar and Rashidinia (2017) have been considered and solved this system of pantograph type delay differential equation with integer-order fractional derivative of order \(\alpha =1\) by the polynomial collocation method. Here, this problem is also solved by the proposed Chelyshkov wavelet method for different values of M, k and \(\alpha \). Figure 5 shows the approximate and exact solutions for \({\hat{m}}=18\) and various fractional order \(\alpha \). To confirm accuracy of the presented method, the maximum absolute error of the numerical results for \(\alpha =1\) is compared with those derived by collocation method in Davaeifar and Rashidinia (2017) in Table 2. From these results, we can realize that the Chelyshkov wavelet method is efficient for solving these nonlinear SFDDEs and numerical solutions converge to the exact solution as fractional order \(\alpha \) tends to 1.

Numerical results for different values of \(\alpha \) and \({\hat{m}}=18\) (Example 3). a \(y_{1}(t)\), b \(y_{2}(t)\), c \(y_{3}(t)\)
Example 4
Now, consider the following nonlinear multi-pantograph SFDDEs (Davaeifar and Rashidinia 2017; Widatalla et al. 2012)
For \(\alpha =1\), the exact solution of this system is \(y_1 (t)=\mathrm{e}^{-t}\cos (t)\) and \(y_{2}(t)=\sin (t)\). This fractional system is also solved using the suggested wavelet approach for several values of \({\hat{m}}\) and \(\alpha \). The Laplace decomposition and polynomial collocation method have been applied to solve the problem with \(\alpha =1\) (Davaeifar and Rashidinia 2017; Widatalla et al. 2012). For the integer-order fractional derivative \(\alpha =1\), Tables 3 and 4 present a comparison between the absolute error of the achieved numerical results and those presented in Davaeifar and Rashidinia (2017) and Widatalla et al. (2012). The graphs of the exact and approximate solutions \(y_{1}(t)\) and \(y_{2}(t)\) for non-integer values of \(\alpha \) and \({\hat{m}}=12\) are shown in Fig. 6. In addition, as these results confirm, the presented collocation method is efficient and accurate in solving such nonlinear fractional system. Furthermore, as \(\alpha \) approaches 1, the approximate solutions converge to the exact solution.
Example 5
As last example, we consider the following SFDDEs (Sedaghat et al. 2012; Ali et al. 2009)
in which, for \(\alpha =1\) the functions \(g_{1}(t), g_{2}(t)\) and initial conditions \(\lambda _{1}, \lambda _{2}\) are compatible with the exact solution \(y_{1}(t)=\sin (t)\) and \(y_{2}(t)=\cos (t)\). To solve this problem, the interval \([-1, 1]\) was transformed into the interval [0, 1] by applying change of variable \(t=2x-1\). Then, the proposed Chelyshkov wavelet method has been employed to approximate its solution. The graphs of exact solution and approximate solutions \(y_{1}(t)\) and \(y_{2}(t)\) for different values of \(\alpha \) and \({\hat{m}}=12\) are shown in Fig. 7. In addition, Table 5 presents the maximum absolute values of the obtained numerical solutions for \(\alpha =1\) and different values of \({\hat{m}}\). As these results confirm, the presented wavelet method is efficient and accurate in solving such SFDDEs. Furthermore, as \(\alpha \) approaches 1, the approximate solutions converge to the exact solution.

Numerical results for different values of \(\alpha \) and \({\hat{m}}=12\) (Example 4). a \(y_{1}(t)\), b \(y_{2}(t)\)

Numerical results for different values of \(\alpha \) and \({\hat{m}}=12\) (Example 5). a \(y_{1}(t)\), b \(y_{2}(t)\)
8 Conclusion
A new kind of orthonormal wavelet basis is constructed from a class of orthonormal polynomials called Chelyshkov polynomials. A comprehensive formulation for the operational matrix of fractional integration and delay operational matrix for this wavelet basis has been given. Then, a numerical Galerkin approach based on these operational matrices is proposed to solve systems of fractional delay differential equations. The main feature of the proposed method is that it reduces system of fractional order delay differential equations into systems of algebraic equations. Some illustrative examples are presented to explain the priority and accuracy of the proposed wavelet method. Moreover, a comparison has been made between our numerical finding and those achieved by other existing methods.
References
Ali I, Brunner H, Tang T (2009) A spectral method for pantograph-type delay differential equations and its convergence analysis. J Comput Math 27(2–3):254–265
Baleanu D, Diethelm K, Scalas E, Trujillo JJ (2016) Fractional calculus: models and numerical methods. World Scientific, Singapore
Bhrawy AH, Alofi AS (2013) The operational matrix of fractional integration for shifted Chebyshev polynomials. Appl Math Lett 26(1):25–31
Bildik N, Deniz S (2017) A new efficient method for solving delay differential equations and a comparison with other methods. Eur Phys J Plus 132:51
Cattani C, Guariglia E, Wang S, Han L (2017) On the critical strip of the Riemann zeta fractional derivative. Fundamenta Informaticae 151(1–4):459–472
Chelyshkov VS (2006) Alternative orthogonal polynomials and quadratures. Electron Trans Numer Anal 25(7):17–26
Davaeifar S, Rashidinia J (2017) Solution of a system of delay differential equations of multi pantograph type. J Taibah Univ Sci 11(6):1141–1157
Dehghan M, Abbaszadeh M, Deng W (2017) Fourth-order numerical method for the spacetime tempered fractional diffusion-wave equation. Appl Math Lett 73:120–127
Evans DJ, Raslan KR (2005) The Adomian decomposition method for solving delay differential equation. Int J Comput Math 82:49–54
Ghasemi M, Tavassoli Kajani M (2011) Numerical solution of time-varying delay systems by Chebyshev wavelets. Appl Math Model 35(11):5235–5244
Gokmen E, Yuksel G, Sezer M (2017) A numerical approach for solving Volterra type functional integral equations with variable bounds and mixed delays. J Comput Appl Math 311:354–363
Heydari MH, Hooshmandasl MR, Cattani C, Hariharan G (2017) An optimization wavelet method for multi variable-order fractional differential equations. Fundamenta Informaticae 151(1–4):255–273
Hwang C, Chen MY (1986) Analysis of time-delay systems using the Galerkin method. Int J Control 44:847–866
Jajarmi A, Baleanu D (2017) Suboptimal control of fractional-order dynamic systems with delay argument. J Vib Control. https://doi.org/10.1177/1077546316687936
Khader MM, Hendy AS (2012) The approximate and exact solutions of the fractional-order delay differential equations using Legendre seudospectral method. Int J Pure Appl Math 74:287–297
Kreyszig E (1978) Introductory functional analysis with applications. Wiley, New York
Kuang Y (1993) Delay differential equations: with applications in population dynamics. Academic Press, New York
Malek-Zavarei M, Jamshidi M (1987) Time-delay systems: analysis optimization and applications. Elsevier Science Ltd, New York
Mardani A, Hooshmandasl MR, Hosseini MM, Heydari MH (2017) Moving least squares (MLS) method for the nonlinear hyperbolic telegraph equation with variable coefficients. Int J Comput Methods 14(3):1750026
Marzban HR, Razzaghi M (2006) Solution of multi-delay systems using hybrid of block-pulse functions and Taylor series. Sound Vib 292:954–963
Mohammadi F (2016a) Numerical solution of stochastic Ito–Volterra integral equations using Haar wavelets. Numer Math Theory Methods Appl 9(3):416–431
Mohammadi F (2016b) Numerical solution of stochastic Volterra–Fredholm integral with Haar wavelets. UPB Sci Bull Ser A 78(2):111–126
Mohammadi F (2016c) Second kind Chebyshev wavelet Galerkin method for stochastic Ito–Volterra integral equations. Mediterr J Math 13(5):2613–2631
Mohammadi F, Ciancio A (2017) Wavelet-based numerical method for solving fractional integro-differential equation with a weakly singular kernel. Wavelets Linear Algebra 4(1):53–73
Mohammadi F, Hosseini MM (2011) A new Legendre wavelet operational matrix of derivative and its applications in solving the singular ordinary differential equations. J Frankl Inst 348(8):1787–1796
Oldham KB, Spanier J (1974) The fractional calculus. Academic Press, New York
Podlubny I (1998) Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications. Academic Press, New York
Rahimkhani P, Ordokhani Y, Babolian E (2017) A new operational matrix based on Bernoulli wavelets for solving fractional delay differential equations. Numer Algorithms 74(1):223–245
Saeed U, Rehman MU (2014) Hermite wavelet method for fractional delay differential equations. J Differ Equ 2014, Article ID 359093
Samko SG, Kilbas AA, Marichev OI (1993) Fractional integrals and derivatives: theory and applications. Gordon and Breach, Langhorne
Sedaghat S, Ordokhani Y, Dehghan M (2012) Numerical solution of the delay differential equations of pantograph type via Chebyshev polynomials. Commun Nonlinear Sci Numer Simul 17:4815–4830
Sedighi Hafshejani M, Karimi Vanani S, Sedighi Hafshejani J (2011) Numerical solution of delay differential equations using Legendre wavelet method. World Appl Sci 13:27–33
Srivastava MH, Kumar D, Singh H (2017) An efficient analytical technique for fractional model of vibration equation. Appl Math Model 45:192–204
Tohidi E, Bhrawy AH, Erfani K (2012) A collocation method based on Bernoulli operational matrix for numerical solution of generalized pantograph equation. Appl Math Model 37:4283–4294
Walter GA, Freedman HI, Wu J (1992) Analysis of a model representing stage-structured population growth with state-dependent time delay. SIAM J Appl Math 52(3):855–869
Wang Z (2013) A numerical method for delayed fractional-order differential equations. J Appl Math 1–7
Widatalla S, Abdulai Koroma M (2012) Approximation algorithm for a system of pantograph equations. J Appl Math. https://doi.org/10.1155/2012/714681
Yang Y, Huang Y (2013) Spectral-collocation methods for fractional pantograph delay-integro-differential equations. Adv Math Phys 1–14
Yu ZH (2008) Variational iteration method for solving the multi-pantograph delay equation. Phys Lett A 372:6475–6479
Acknowledgements
The author is very grateful to the anonymous reviewers for their useful comments and valuable suggestions that improved the paper.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
I have no conflict of interest to declare.
Additional information
Communicated by José Tenreiro Machado.
Rights and permissions
About this article

Cite this article
Mohammadi, F. Numerical solution of systems of fractional delay differential equations using a new kind of wavelet basis. Comp. Appl. Math. 37, 4122–4144 (2018). https://doi.org/10.1007/s40314-017-0550-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40314-017-0550-x
Keywords
- Chelyshkov polynomials
- Chelyshkov wavelet
- Convergence analysis
- Operational matrix
- Caputo derivative
- Systems of fractional delay differential equations
- Galerkin method