
Abstract
This paper presents a fuzzy goal programming (FGP) procedure for multi objective quadratic programming problem. In the FGP model formulation, firstly the objectives are transformed into fuzzy goals (membership functions) by means of assigning an aspiration level to each of them and suitable membership function is defined for each objectives. Then achievement of the highest membership value of each of fuzzy goals is formulated by minimizing the negative deviational variables. The proposed methodology and its efficiency over traditional utility function approach are illustrated by the numerical examples.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Decision-making problems such as production planning, water resource management etc., involve multiple conflicting objectives with constraints and can be described by multiple objective programming models. Wallenius [21], Zimmermann [25, 26], Yager [22], Hanan [8], Narasimhan [15], Rubin and Narasimhan [18], Ying-Yung [23], Chanas [3], Rommelfanger [19], Gupta and Chakraborty [4, 7] and many researchers used and modified the concept of multi objective decision making problems and also discussed different approaches to tackle the multi objective programming problem. Balbas and Galperin et al. [2] gave a sensitivity analysis in multi objective optimization. Yan and Wei et al. [24] constructed an efficient solution structure of multi objective linear programming. Jain and Lachhwani [10] considered multi objective programming problem with fuzzy relational equations. Afterwards, Jain and Lachhwani [11] obtained the solution of multi objective linear fractional programming problem by converting it into fuzzy programming problem. Numerous methods for multi objective optimization problems have been suggested in the literature. Each method appears to have some advantages as well as disadvantages. In the context of each application, some of the methods seem more appropriate than others. However, the issue of choosing a proper method in a given context is still a subject of active research. A number of researchers have worked for fuzzy mathematical programming problem using goal programming approach like Pal and Moitra et al. [17] suggested a goal programming procedure for fuzzy multi objective linear fractional programming problem. Chao-Fang et al. [5] proposed a generalized varying domain optimization method using fuzzy goal programming (FGP) for multi objective optimization problem with priorities. Pramanik and Roy [16] gave a procedure for solving multi level programming problems in a large hierarchical decentralized organization through linear FGP approach. Ibrahim [9] presented FGP algorithm for solving decentralised bi-level multi objective (DBL-MOP) problems with a single decision maker at the upper level and multiple decision makers at the lower level. Li and Hu [12] proposed a satisfying optimization method based on goal programming for fuzzy multi objective optimization problem with the aim of achieving the higher desirable satisfying degree. But a very few of the researchers have considered fuzzy quadratic programming problem. This situation inspired us to consider multi-objective quadratic programming (MOQP) problem.
A quadratic programming problem is a nonlinear programming problem having an objective function that contains both linear and quadratic forms. For a non-linear program, the feasible region may not be convex. However, Wolfe [20] gave a simplex method to solve quadratic programming problem with single objective function with the assumption that the set of feasible solutions is a convex polyhedral with a finite number of extreme points. Mishra and Ghosh [14] proposed an interactive fuzzy programming method for obtaining a satisfactory solution to a bi-level quadratic fractional programming problem. Recently, Ammar [1] considered multi objective quadratic programming problem having fuzzy random coefficients matrix in the objectives and constraints and the decision vector are fuzzy pseudo random variables.
The aim of this paper is to present FGP approach which is introduced by Mohamed [13] to solve MOQP problems. In the FGP model formulation of the problem, firstly the objectives are transformed into fuzzy goals by means of assigning an aspiration level to each of them and suitable membership function is defined for each objective. Then achievement of the highest membership values (unity) to the extent possible of each of the fuzzy goals is considered.
The paper is organized as follows: In “Problem Formulation”, we discuss formulation of MOQPP, membership function and related definitions. In next section, we discuss proposed FGP approach to tackle MOQPP and formulate mathematical models related to it. A line diagram of FGP model development is also given in this section. Comparison of proposed methodology with utility function approach is considered in “Comparison with Utility Function Approach”. To illustrate the proposed methodology, numerical examples are considered and comparative analysis is performed with utility function approach in “Numerical Example”. Concluding remarks are given in the last section.
Problem Formulation
The general format of classical multi objective quadratic programming problem can be stated as:
where \( Z_{i} (X) = C_{i} X + X^{T} D_{i} {\text{X}} \quad \forall \,i = 1,2, \ldots ,k \)
Here C i and D i are row vectors with n-components. X and b are column vectors with n and m components, respectively. \( X^{T} D_{i} {\text{X}}\;\,\left( {\forall \,i = 1,2, \ldots ,k} \right) \) is a strictly concave quadratic function on the convex set S of all its feasible solutions such that a relative maximum of Z i (X) \( Z_{i} \left( X \right)\;\forall \,i = 1,2, \ldots ,k \) over S is a global maximum which is unique. Let us consider some related definitions as follows:
Definition 1
An ideal solution (ideal point) X * i is the finite optimal solution to the single objective programming problem i.e. Maximize Z.
Subject to,
Definition 2
\( X^{0} \in S \) is an efficient solution to problem (1)–(2) if and only if there exists no other \( X \in S \) such that \( Z_{i} \ge Z_{i}^{0} \) for all i = 1,2,…,k and \( Z_{i} > Z_{i}^{0} \) for at least one i.
For our purpose, we define ideal solution (ideal point) of single objective and compromise efficient solution for multi objective programming problems.
Definition 3
For problem (1)–(2), a compromise optimal solution is an efficient solution selected by the decision maker (DM) as being the best solution where the selection is based on the DM’s explicit or implicit criteria. If an imprecise aspiration level is introduced to each of the objectives, then these objectives are termed as fuzzy goals.
Now, in the field of fuzzy programming, the fuzzy goals are characterized by their associated membership functions. The membership function for the i th fuzzy goal can be defined according to Gupta and Chakraborty [7] as:
where the distance function \( d_{i} \) with unit weight as: \( d_{i} (X) = \left| {\overline{{Z_{i} }} - Z_{i} (X)} \right|,\;\,\forall \,i = 1,2, \ldots ,k.\) This distance depends upon X. At \( {\text{X}} = \overline{\text{X}} \) (ideal point in X-space), \( d_{i} = 0 \) and at \( X = \underline{\text{X}} \) (nadir point in X-space),\( Z_{i} (X) = \underline{{Z_{i} }} \), we get the maximum value of d i (X) as:
and
Now in the fuzzy decision making environment, the achievement of the objective goals to their aspired levels to the extend possible is actually represented by the possible achievement of their respective membership values to the highest degree. Regarding the presently available procedures, a FGP approach seems to be most appropriate for the problem and considered in this paper.
Goal Programming Formulation
In fuzzy programming approach, the highest degree of membership function is 1. So, as given by Mohamed in [13] for the defined membership function in (3), the flexible membership goals with the aspired level 1 can be expressed as:
i.e.,
where \( D_{i}^{ - } ( \ge 0) \) and \( D_{i}^{ + } ( \ge 0) \) with \( D_{i}^{ - } D_{i}^{ + } = 0 \) represent the under and over deviational variables, respectively, from the aspired levels. In conventional GP, the under and/or over deviational variables are included in the achievement function for minimizing them and that depends upon the type of the objective functions to be optimized. In this approach, only the under deviational variables \( D_{i}^{ - } \) is required to be minimized to achieve the aspired levels of the fuzzy goals. It may be noted that any over deviation from a fuzzy goal indicate the full achievement of the membership value. Now it can be easily realized that the membership goals in expression (6) are inherently non linear equation and this may reduce computational difficulties in the solution process. The i th membership goal with aspired level 1 can be presented as:
However, for model simplification the expression (7) can be considered as a general form of goal expression of the above stated membership goals. It may be noted that when a membership goal is fully achieved, \( D_{i}^{ - } = 0 \), and when its achievement is zero, \( D_{i}^{ + } = 1 \) are found in the solution. Now, if the most widely used and simplest version of GP (i.e., minsum GP) is introduced to formulate the model of the problem under consideration, then GP model formulation becomes:
Model I
Find X so as to minimize \( \lambda = \sum\limits_{i = 1}^{k} {w_{i} D_{i}^{ - } } \)
Subject to,
and
where \( \lambda \) represents the fuzzy achievement function consisting of the weighted under deviational variables where the numerical weights \( w_{i} \ge 0,\;\;(\forall i = 1,2, \ldots ,k) \)represent the relative importance of achieving the aspired level of the respective fuzzy goals subject to the constraint set in the decision making situation. The above model can also be rewritten as:
Model II
Find X so as to minimize \( \lambda = \sum\limits_{i = 1}^{k} {D_{i}^{ - } } \)
Subject to,
and
However, the above models involve constrains quadratic in nature but the problem (9) can be easily solved using non linear techniques. Following the above discussion, we can construct the proposed FGP algorithm for solving MOQP problems as:
- Step 1::
-
Solve each objective function and calculate maximum and minimum of each objective function under the given constraints.
- Step 2::
-
Calculate the distance \( \overline{{d_{i} }} = \left| {\overline{{Z_{i} }} - \underline{{Z_{i} }} } \right| \).
- Step 3::
-
Calculate \( p = { \sup }\left\{ {\overline{{d_{i} }} } \right\} \).
- Step 4::
-
Construct the membership function (3) for each objective function.
- Step 5::
-
Formulate the FGP model I and II.
- Step 6::
-
Solve the FGP model.
- Step 7::
-
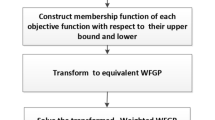
If solution is satisfactory, then stop. Otherwise modify the values of weights of negative deviational variables. The line diagram of proposed FGP model development is shown in Fig. 1 as:
Fig. 1 
Line diagram of development of FGP model for MOQP problems

Comparison with Utility Function Approach
Here we consider utility function approach given by Cochrone and Zeleny [6] for a general multi objective programming problem as:
where \( W_{i} \ge 0 \) are weights of the i th objective function. Now in order to compare solution procedures (8)–(10), It may be noted that when a membership goal is fully achieved, \( D_{i}^{ - } = 0 \), is found in the solution. Then in this situation, the expression (7) can be written as:
Thus utility function (10) becomes
Which is utility function with an increase of quantity \( p\sum\limits_{i = 1}^{k} {W_{i} } D_{i}^{ + } \). This concludes that the proposed methodology gives increased value of utility function with an increase of quantity \( p\sum\limits_{i = 1}^{k} {W_{i} } D_{i}^{ + } \).
Numerical Example
The following examples are considered to illustrate the above approach:
Example 1
where
subject to,
and
To formulate fuzzy membership function (3), we calculate the value of each objective function individually as: \( \overline{{Z_{1} }} = 6.7692,\;\underline{{Z_{1} }} = - 72,\;\overline{{Z_{2} }} = 7,\,\underline{{Z_{2} }} = - 72,\,\overline{{Z_{3} }} { = 6} . 5 ,\,\underline{{{\text{Z}}_{ 3} }} { = } - 5 4 , {\text{ and }}p = 79 \) Thus the equivalent FGP formulation is obtained as: Find \( {\text{X}}\;(x_{3} , { }x_{4} ) \) so as to
Minimize
And satisfy
subject to,
and
Solving the above problem using non linear techniques, the optimal solution obtained as:
And the membership values achieved are:
Example 2
where
subject to,
and
To formulate fuzzy membership function (3), we calculate the value of each objective function individually as: \( \overline{{Z_{1} }} = 14,\;\underline{{Z_{1} }} = 0.50,\;\overline{{Z_{2} }} = 4.6667,\;\underline{{Z_{2} }} = 0,\;\overline{{Z_{3} }} { = 6,}\;\underline{{{\text{Z}}_{ 3} }} { = } - 4\;{\text{and }}p = 13.50 \). Thus the equivalent FGP formulation is obtained as:
Find \( {\text{X}}\;\left( {x_{3} , { }x_{4} } \right) \) so as to minimize \( {{\uplambda}} = \left( {D_{1}^{ - } + D_{2}^{ - } + D_{3}^{ - } } \right) \)
And satisfy
subject to,
and
Solving the above problem using non linear techniques, the optimal solution obtained as:
And the membership values achieved are:
If we compare the above results of numerical example 2, with the traditional utility function approach given by Cochrane and Zeleny [6] taking utility function as the addition of objective functions, then
i.e.,
subject to,
and
Solving the above quadratic programming problem, we obtain
It is obvious from the results that the proposed FGP approach gives a fair optimal solution than the utility function approach.
Conclusion
An effort has been made to present FGP approach for the solution of multi objective quadratic programming problem. The proposed method is more efficient than the traditional method which has been illustrated with numerical examples. Also, the present method is simpler than other available methods as it finally converts multi objective quadratic programming problem into non linear programming problem which can be easily solved using non linear techniques or software packages like LINGO, CPLEX, etc. Certainly there are many other points for future research in the area of FGP and should be studied. Some of these points are:
-
1.
An efficient algorithm should be carried out to solve multi objective quadratic fractional programming problems.
-
2.
A solution algorithm is required to treat multi objective integer programming problems with goal programming approach.
References
Ammar EE (2009) On random multiobjective quadratic programming. Eur J Oper Res 193:329–341
Balbas A, Galperin E, Jimenez Guerra P (2005) Sensitivity in multi objective optimization: the generalized evolvent theorem. Non Linear Anal 63:725–733
Chanas S (1989) Fuzzy programming in multi objective linear programming: a parametric approach. Fuzzy Sets Syst 29:303–313
Chakraborty M, Gupta S (2005) Fuzzy mathematical programming for multi objective linear fractional programming problem. Fuzzy Sets Syst 125:335–342
Chao-Fang Hu, Teng Chang-Jun, Li Shao-Yuan (2007) A fuzzy gaol programming approach to multi-objective optimization problem with priorities. Eur J Oper Res 176:1319–1333
MacCrimmon KR (1973) An overview of multiple objectives decision making. In: Cochrone JL, Zeleny M (eds) Multiple criteria decision making. University of South Caroline Press, Columbia
Gupta S, Chakraborty M (1997) Multiobjective linear programming: a fuzzy programming approach. Int J Manag Syst 13(2):207–214
Hanan EL (1979) On the efficiency of the product operator in fuzzy programming with multiple objective. Fuzzy Sets Syst 2:259–263
Ibrahim AB (2009) Fuzzy goal programming algorithm for solving decentralized bi-level multiobjective programming problem. Fuzzy Sets Syst 160:2701–2713
Jain S, Lachhwani K (2009) Multiobjective programming problem with fuzzy relational equations. Int J Oper Res 6(2):55–63
Jain S, Lachhwani K (2009) Solution of a multi objective fractional programming problem using fuzzy programming approach. Proc Nat Acad Sci India Sect A 79(part III):267–272
Li S, Hu C (2009) Satisfying optimization method based on goal programming for fuzzy multiple objective optimization problem. Eur J Oper Res 197:675–684
Mohamed RH (1997) The relationship between goal programming and fuzzy Programming. Fuzzy Sets Syst 89:215–222
Mishra S, Ghosh A (2006) Interactive fuzzy programming approach to bi-level quadratic fractional programming problem. J Ann Oper Res 143(1):251–263
Narasimhan R (1980) Goal programming in fuzzy environment. Decision Sci 11:325–336
Pramanik S, Roy TK (2007) Fuzzy goal programming approach to multi level programming problem. Eur J Oper Res 176:1151–1166
Pal BB, Moitra BN, Maulik U (2003) A goal programming procedure for fuzzy multiobjective linear fractional programming problem. Fuzzy Sets Syst 139:395–405
Rubin PA, Narasimhan R (1984) Fuzzy goal programming with nested priorities. Fuzzy Sets Syst 14:115–129
Rommelfanger H (1989) Interactive decision making in fuzzy linear optimization problems. Eur J Oper Res 41:210–217
Wolfe P (1959) The simplex method for quadratic programming. Econometrica 27:382–389
Wallenius J (1975) Comparative evaluation of some interactive approaches to multicriteria optimization. Manage Sci 21:1387–1396
Yager RR (1979) Mathematical programming with fuzzy constraints and preference on the objective. Kybernates 8:258–291
Ying-Yung F (1983) A method using fuzzy mathematical programming to solve vector maximum problem. Fuzzy Sets and System 9:129–136
Yan H, Wei Q, Wang J (2005) Constructing efficient solution structure of multi objective linear programming. J Math Anal Appl 307:504–523
Zimmermann HJ (1978) Fuzzy programming and linear programming with several objectives function. Fuzzy Sets Syst 1:46–55
Zimmermann HJ (1981) Fuzzy mathematical programming. Comput Oper Res 4:291–298
Acknowledgments
The author is indebted to the honorable referees for their valuable and constructive suggestions to improve the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lachhwani, K. Fuzzy Goal Programming Approach to Multi Objective Quadratic Programming Problem. Proc. Natl. Acad. Sci., India, Sect. A Phys. Sci. 82, 317–322 (2012). https://doi.org/10.1007/s40010-012-0040-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40010-012-0040-x