
Abstract
The accurate identification of modal parameters is a critical issue in the determination of features of civil structures. In this paper, a novel method based on the multisynchrosqueezing transform (MSST) is proposed to identify modal parameters, including natural frequencies, damping ratios and mode shapes of civil structures. The MSST consists of multiple operations of a synchrosqueezing transform so that the time-frequency representation of an analyzed signal becomes more concentrated, which allows more accurate decomposition of the signal. To identify modal parameters based on the MSST, first, the natural extraction technique is used to obtain a free vibration response from a measured ambient vibration response. Second, the free vibration response is decomposed into several modes by using the MSST, and mode shape vectors can be obtained from the decomposed modes for all measurements. Then, instantaneous phases and instantaneous amplitudes of the modes are obtained by using the Hilbert transform. Finally, a least-squares curve fitting technique is performed on the instantaneous phases and instantaneous amplitudes to extract natural frequencies and damping ratios. Two numerical examples, a 3-degree-of-freedom free vibration response signal and a four-story frame steel structure subjected to environmental vibration, are used to demonstrate the applicability of the MSST-based method. In addition, an experimental validation based on a pedestrian overpass, located in Tufts University, United States, is conducted. Case analyses indicate that the MSST-based method can easily identify high-quality natural frequencies and damping ratios from measurements of structures.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Civil structures, including tall buildings and long bridges, facilitate the daily life of humans. However, structures may also be easily damaged or destroyed by violent earthquakes, strong winds, fatigue load and so forth. Such damage or destruction can cause large economic and human losses. Therefore, it is necessary to conduct normal monitoring of structures to reduce or avoid economic losses and casualties. Modal parameters, such as natural frequencies and damping ratios, are capable of representing the vibration characteristics of civil structures [23] and are necessary benchmark parameters for evaluating the state of structures. The accurate identification of modal parameters becomes a vital issue for engineers and researchers. Initially, experimental modal analysis was developed to identify modal parameters by using external excitation devices such as shakers and impact hammers. Later, a less expensive and more convenient modal parameter identification technique was introduced, namely, operational modal analysis, which uses ambient vibrations for excitation. However, the measured responses in operational modal analysis are low amplitudes with noise, making modal parameter identification from these measurements challenging. It is necessary to develop reliable and suitable methods to address the challenge.
Among the developed methods for modal parameter identification, signal decomposition-based methods have received much attention in recent decades. Signal decomposition-based methods are based on the characteristic that signal decomposition techniques can decompose multicomponent signals into several monocomponents. Hence, decomposing the vibration responses of structures can yield the modal responses of structures, which contain modal parameter information for each mode. Huang et al. [26, 27] developed a signal decomposition-based method in which empirical mode decomposition (EMD) was applied to identify natural frequencies and damping ratios by combining the Hilbert transform (HT) and linear least-squares fitting. He et al. [10] used a random decrement technique to obtain free vibration responses from decomposed components by EMD. This operation expands the EMD-based method in Refs. [26, 27] to identify modal parameters from ambient vibration responses, not just free vibration responses. However, the lack of a theoretical mathematical basis leads to a number of limitations for EMD, such as (a) the nonstandard sifting stopping criterion, (b) the unpredictable or inconsistent number of decomposed components, (c) the lack of orthogonality and mode mixing, and (d) the end effects of the spline curve [19]. To address or alleviate these limitations, support vector regression machine and the HT have been applied to improve EMD; subsequently, the improved EMD was used to identify modal parameters of a four-story, steel-frame structure [28]. On the other hand, to solve the mode mixing problem, time-varying filtering-based EMD employed a time-varying filter technique in the sifting process of EMD [17]. This method was applied to identify modal parameters of structures by using a decentralized sensing approach, where only a single sensor was available at a particular time [16]. However, these improved EMD methods cannot address the limitations in EMD completely, which can limit the accuracy of identified modal parameters by EMD-based methods.
In addition to EMD-based methods, other signal decomposition methods have been developed and applied to identify modal parameters of structures. Local mean decomposition was used for modal parameter identification of civil structures through free or ambient vibration responses [15]. An EMD-like tool, synchrosqueezed wavelet transform [5], was introduced to modal parameter identification in combination with the HT and Kalman filters [22]. For the synchrosqueezed wavelet transform-based method, the parameters of the Kalman filter depend on the characteristics of sensors, which are not practical. Empirical wavelet transform (EWT) is an adaptive wavelet filter bank constructed on the segmentation of Fourier spectra for signal decomposition [9]. With this method, signals with a low signal-to-noise ratio and closely spaced modes are hard to decompose by EWT [30]. Auto-regressive power spectrum [18, 24] and multiple signal classification [1] have been used to improve the EWT for modal parameter identification, but the mode mixing problem in closely spaced modes for EWT is not eliminated [30]. Variational mode decomposition was introduced to decompose signals into a set of distinctive components with a center frequency [6]. It was applied to identify modal parameters of a three-story shear frame and a pedestrian bridge with good performance [2]. However, variational mode decomposition cannot decompose nonstationary signals with chirp modes. Short-time narrow-banded mode decomposition (STNBMD) was introduced to address the issue in variational mode decomposition [19]. STNBMD was used to identify time-varying structures with free vibration responses, and an improved model was applied to estimate modal parameters of linear time-invariant systems [30]. Symplectic geometry mode decomposition [21] was developed and applied to identify modal parameters of structures [14]. In Ref. [14], the measured vibration responses were decomposed into several symplectic geometric components, and modal parameters of time-invariant structures and instantaneous frequencies of time-varying structures were identified from the decomposed symplectic geometric components. Recently, the multisynchrosqueezing transform (MSST) was introduced in Ref. [29]. The MSST algorithm has an excellent theoretical principle, using an iterative reassignment procedure to concentrate the time-frequency energy of the analyzed signals. The reassignment procedure is only in the frequency direction, and no information is missing; hence, in theory, the MSST can decompose signals well [29]. Considering the ability and effectiveness of the signal decomposition of the MSST, this method is a promising and reliable tool for modal parameter identification of civil structures.
In this work, a method for modal parameter identification is proposed. The method is called the MSST-based method and is combined with other techniques, Including the natural excitation technique (NExT) [13], HT and least-squares curve fitting. In the MSST-based method, free vibration responses are obtained first from measured free vibrations or ambient vibration processing by the NExT. The MSST is applied to decompose the free vibration responses and determine the modal response of each mode. Then, the modal responses for all measurements are used to obtain mode shape vectors. The HT is used to determine the instantaneous amplitudes and instantaneous phases of each mode. Least-squares curve fitting is applied to estimate damping ratios and natural frequencies from the instantaneous amplitudes and instantaneous phases, respectively. Numerical studies are conducted to verify the effectiveness of the MSST-based modal parameter identification method for a simulated signal and a four-story frame structure. In addition, an experiment involving a real-life pedestrian bridge measured under ambient vibration is conducted to study the effectiveness of the MSST-based method.
The remainder of this paper is organized as follows. In Sect. 2, the NExT, MSST, HT, least-squares curve fitting and identification of mode shapes are briefly reviewed, and the proposed method is described. In Sect. 3, two numerical investigations are presented. In Sect. 4, an experimental investigation is conducted. Conclusions and some discussion of future works are presented in Sect. 5.
2 Methodology
A flowchart of the proposed method for modal parameter identification based on the MSST is shown in Fig. 1, and a step-by-step description is provided as follows.
Step 1. Obtain vibration data from the identified structure, and conduct preprocessing methods, such as filtering and resampling.
Step 2. Obtain the free vibration response of the structure using the NExT from the vibration data obtained in Step 1.
Step 3. Decompose the free vibration response obtained in Step 2 into several modes.
Step 4. Repeat Steps 1–3 for the vibration data from all installed accelerometers and obtained modal shape vectors.
Step 5. Obtain instantaneous amplitudes and instantaneous phases of the modes by employing the HT.
Step 6. Obtain damping ratios and natural frequencies of the structure by employing curve fitting to instantaneous amplitudes and instantaneous phases, respectively.

Graphical illustrations of the proposed MSST-based method
2.1 Free vibration response extraction using the NExT
For an ambient vibration structure with n degrees of freedom, the motion equation of the structure can be described as follows:
where M, K, and C denote the mass, stiffness, and damping matrices of the structure, respectively. x(t) denotes displacement response vectors of the structure, and \((\cdot )^{\prime }\) denotes the derivative of t. F(t) is the excitation force with mapping matrix E, which relates the excitation force to the corresponding degrees of freedom. It assumes that the excitation force is a broadband signal that acts on ambient vibration structures. Hence, Eq. (1) can be rewritten as
where R denotes a vector of a correlation function between the vibration response at p and a reference vibration response at q, which can be expressed as
where T is the total time of samples and \(\tau\) is the time lag.
2.2 MSST
The short-time Fourier transform of a signal s with respect to the even and real window function h, in which \(s,h\in L^{2}({\mathbb {R}})\), is expressed by
where the window function h is compactly supported in \(\left[ -\Delta _{t},\Delta _{t}\right]\) and i denotes \(\sqrt{-1}\). Signals can be decomposed into several continuous independent modes with time-variant oscillatory properties, so signal s(t) is expressed as in the multicomponent nonstationary signal model:
where \(A_{k}(t)\) denotes the instantaneous amplitude of the k-th mode and \(\varphi _{k}(t)\) is the instantaneous phase of the k-th mode. Substituting Eq. (5) into Eq. (4) gives
where \(\hat{h}(\cdot )\) denotes the Fourier transform of the window function h. The instantaneous frequency \({\hat{\omega }}(t,\omega )\) can be estimated from the partial derivative of \(H(t,\omega )\) as expressed by
The time-frequency coefficients are squeezed by multiple frequency-reassignment operators:
where \(\delta (\cdot )\) denotes the Dirac delta function and n denotes the number of frequency-reassignment operators. For example, when n is equal to 1, the frequency-reassignment operator will be applied only one time, so it is the same as the synchrosqueezed wavelet transform; when n is increased, the time-frequency representation of analyzed signals becomes more concentrated, which might allow perfect reconstruction of the signals in theory. Each mode can be reconstructed as
where \(\text {d}s^{\prime }\) is the reconstruction bandwidth of the MSST.
2.3 HT
The HT is applied to the instantaneous damping ratio and instantaneous frequency of each mode \(s_{k}(t)\). The HT is defined by convoluting \(s_{k}(t)\) with the term 1/t as follows [12]:
where \(\widetilde{(\cdot )}\) denotes the operator of the HT. Coupling both \(s_{k}(t)\) and its HT, an analytic signal \(z_{k}(t)\) is generated as follows:
in which
and
2.4 Curve fitting
Once the instantaneous amplitude \(A_{k}(t)\) and instantaneous phase \(\varphi _{k}(t)\) are identified using the HT, the natural frequency and the damping ratio for each mode can be estimated from them. The instantaneous frequency is the derivative of the instantaneous phase and can be expressed by
For a time-invariant system, the instantaneous frequency is a constant, so the instantaneous phase can be determined by
where \(\omega _{d,k}\) denotes the damped natural frequency of the k-th mode and c is a constant. Hence, a least-square curve fitting can be used to identify the damped natural frequency. The instantaneous amplitude is an exponential decay for underdamped structures, so the natural logarithm of \(A_{k}(t)\) is a first-order linear function, which is expressed by
where \(a_{k}\) denotes the product of undamped natural frequency and damping ratio and b is a constant. Therefore, the damping ratio is estimated by least-squares curve fitting, and it is determined by
where \(\omega _{n,k}\) denotes undamped natural frequency, in which \(\omega _{d,k}=\omega _{n,k}\sqrt{1-\zeta _{k}^{2}}\). Suppose that \(\zeta _{k}\) is relatively small for civil structures; hence, \(\omega _{d,k}\approx\) \(\omega _{n,k}\). Note that the natural frequency is approximated by the damped natural frequency in the MSST-based method.
2.5 Identification of mode shape
To identify mode shapes, the modal responses of a structure at all accelerometers are considered. The values of the modal response data at a moment (\(t_{m}\)) from all accelerometers are used to obtain the mode shape vector for a specific mode. Hence, the k-th mode shape vector can be expressed as
where \(s_{k,i}\) denotes the k-th modal response at the i-th accelerometer, \({\cdot }^\mathrm{T}\) is the transpose of a function, and N is the number of installed accelerometers.
3 Numerical validation
In this section, the effectiveness of MSST-based modal parameter identification is studied by considering two numerical cases, including a simulated free vibration response of a three-degree-of-freedom system and a benchmark four-story frame structure. To evaluate the accuracy of the proposed method, the mean absolute percentage error (MAPE) is used and can be expressed by
where \(y_{n}\) and \({\hat{y}}_{n}\) are the target parameter and estimated parameter, respectively; N is the total number of these parameters.
3.1 Analysis of a simulated signal
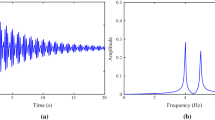
To study the effectiveness of the MSST-based method for identification of damping ratios and natural frequencies, a simulated signal, denoted by \(y_{1}(t)\), is applied. The signal is a mathematical model to describe the displacement response of a time-varying underdamped system under free vibration [25]. It can be expressed by
where \(A_{n}\) is the amplitude, \(\zeta _{n}\) is the damping ratio, \(f_{n}\) is the natural frequency and \(\theta _{n}\) is the phase angle of the n-th mode. N is the total number of modes. In this case, the number of modes is three for simulating \(y_{1}(t)\). The parameters used for generating \(y_{1}(t)\) are as follows: three natural frequencies, \(f_{1}\) = 3, \(f_{2}=0.3t+5\) and \(f_{3}\) = 9.5 Hz; hence, \(f_{2}\) is time-varying. Amplitudes are 1, phase angles are 0, and the correlated damping ratios are \(\zeta _{1}\) = 1.4%, \(\zeta _{2}\) = 1% and \(\zeta _{3}\) = 0.8%. In this simulation, a sampling frequency of 200 Hz is used to sample 5 s, as shown in Fig. 2.

Time series of the synthetic signal \(y_{1}(t)\)
As the vibration data \(y_{1}(t)\) are obtained, MSST-based modal parameter identification is applied. The NExT is not used here since \(y_{1}(t)\) is a free vibration response. The MSST is directly employed to decompose \(y_{1}(t)\), and its decomposition results are shown in Fig. 3. The black solid line denotes the time series of theoretical modes, and the red dashed line denotes those of decomposed modes. It can be seen that the decomposed modes are close to the theoretical ones. However, deviations exist at the end of decomposed modes. This phenomenon is called end effects in the following text. Then, instantaneous phases and instantaneous amplitudes of the decomposed modes are obtained by employing the HT. Natural frequencies are estimated based on the instantaneous phases. The curve fitting of the instantaneous phases is shown in Fig. 4. The fitting results are consistent with the original instantaneous phases. Furthermore, damping ratios are obtained from the curve fitting of the instantaneous amplitudes. The end effects of the decomposed modes are magnified in the instantaneous amplitudes; hence, the two end regions are not chosen for curve fitting. The curve fitting of the instantaneous amplitudes is shown in Fig. 5. The fitting results are consistent with the original instantaneous amplitudes except for the two end regions.

Comparison of the decomposed modes by the MSST (red dash lines) and theoretical modes (black solid lines)

Instantaneous phases extracted by the MSST-based method and their curve fitting results for the simulated signal

Instantaneous amplitudes extracted by the MSST-based method and their curve fitting results for the simulated signal
Natural frequencies and damping ratios are estimated as shown in Table 1. The estimated natural frequencies are nearly the same as the theoretical frequency, and even the time-varying frequency is estimated well. The largest MAPE of the natural frequencies is 0.5%, which is rather small. In addition, the estimated damping ratios are also close to the theoretical ratios. The largest MAPE of the damping ratios is 0.8%. It is noted that the MSST-based method exhibits a high accuracy for estimating modal parameters, including natural frequencies and damping ratios.
3.2 Benchmark four-story 2 \(\times\) 2 bay frame structure
A benchmark problem (a four-story 2 \(\times\) 2 bay three-dimensional steel structure) used by Johnson et al. [7] is employed to validate the efficiency of the MSST-based method. This structure is 2 \(\times\) 1.25 m in width and 4 \(\times\) 0.9 m in height, as shown in Fig. 6. The simulation of this structure was coded in MATLAB, and its code is accessible in DATAHUBFootnote 1. The roof of the simulated structure is exposed to a dynamic load with an intensity of 300 parallel to the diagonal. Sixteen acceleration sensors (ASs) are embedded in the middle of the bilateral bar of the four stories. The vibration responses in the simulation are measured with a sampling frequency of 1000 Hz lasting 400 s for each sensor. It should be evident that a period of 400 s is sufficient to obtain an accurate free vibration response by means of the NExT. A damping ratio of 1% is employed in each mode, and the computation of the damping matrix will be a standard eigenvalue problem when the damping ratio is assumed. Moreover, to examine the robustness of the proposed method, a 30% root mean square amplitude is added to the most massive vibration responses as noise.

Diagram of the benchmark four-story 2 \(\times\) 2 bay frame structure
The measured vibration response from AS 1 in the x-direction, as shown in Fig. 7, is first exploited to demonstrate the MSST-based method. The observed vibration response from AS 1 is transformed to a free vibration response by the NExT. In this section, one thousand samples are selected for the NExT, corresponding to a duration of 1 s for the free vibration response. This amount permits the acquisition of sufficient samples to extract the free vibration response of the observed vibration response. AS 15 is selected as the location of the reference to fulfill the suggestion that the test channels should be far from each other [4]. Then, the MSST algorithm is applied to estimate the modes contained in the free vibration response, and the result of individual modes is shown in Fig. 8. Only the free vibration response in the range of [0.1, 0.9] s is shown because of the end effects. In addition, each instantaneous phase and instantaneous amplitude of the mode is given in Figs. 9 and 10, respectively. Finally, curve fitting is applied to these four modes. Table 2 summarizes the natural frequencies and damping ratios estimated using the MSST-based method and finite element analysis (FEA) offered by Caicedo et al. [4], where four degrees of freedom in the x-direction are obtained. The maximum MAPEs of the natural frequencies and damping ratios are 0.1 and 6.3%, respectively. These results indicate that the MSST-based method can overcome the problem of noisy data measured in the benchmark structure. Additionally, for comparison with other methods, the results estimated in Refs. [1, 22] are presented. The natural frequencies and damping ratios extracted in Refs. [1, 22] in the x-direction have excellent performance. The maximum MAPEs of the natural frequency in Refs. [1, 22] are 0.33 and 0.4%, respectively. Furthermore, the largest MAPEs of the damping ratio in Refs. [1, 22] are 15 and 9%, respectively, which are larger than those associated with the MSST-based method.

Time series of the vibration response measured by AS 1 on the benchmark structure

Modes decomposed by the MSST for the benchmark structure

Instantaneous phases extracted by the MSST-based method and their curve fitting results for the benchmark structure

Instantaneous amplitudes extracted by the MSST-based method and their curve fitting results for the benchmark structure
The results estimated by the MSST-based method highly resemble those of FEA. Moreover, compared to the MAPEs of the natural frequencies reported in Refs. [1, 22], those of the MSST-based method are the least. Additionally, the damping ratios obtained by the MSST-based method are more precise than those in Refs. [1, 22]. The largest MAPEs are 15, 9, and 6.3%, illustrating that the damping ratios are very close to the corresponding FEA values. In addition, a decrease in the MAPEs of the damping ratios exceeding 58% is observed compared with the results in Ref. [1]. Reference [22] combined the random decrease technique, synchrosqueezed wavelet transform, HT, and Kalman filter to identify the modal parameters of civil structures subjected to ambient vibration. Despite the satisfactory performance achieved, the technique applied to estimate the free vibration response, i.e., the random decrease technique, is vulnerable to noise. Furthermore, the accuracy of the approach depends on the appropriate selections of the measurement variables and noise for the case, which are established from the observed Kalman filter data, requiring prior knowledge. Reference [1] combined an improved EWT, NExT, HT, CEA [8], and curve fitting for modal parameter identification of large smart structures. Compared to the results reported in Ref. [22], the natural frequencies estimated in Ref. [1] are similar, but the damping ratios identified are better, with the error diminishing by over 40%. However, due to the application of multiple signal classification in the improved EWT [1], determining the number of estimation modes may not be easy when a scholar or engineer has no prior knowledge of the vibration responses measured for structures.
4 Experimental validation
In this section, an experimentally measured ambient vibration response is employed to validate the effectiveness and performance of the MSST-based method for modal parameter identification. The vibration response from a two-span continuous steel truss bridge, i.e., the Dowling Hall footbridge, is obtained. It is a footbridge with a reinforced concrete deck located on the Medford campus of Tufts University, as shown in Fig. 11a. The full length of the footbridge is 44 m, and its width is 3.9 m. A monitoring system was embedded on the footbridge running continuously for 17 weeks, from January 5, 2010, to May 2, 2010. It included an array of ten thermocouples, eight accelerometers, a remote data acquisition system, and a communication system. The eight accelerometers are labeled S1, S2, ... , S8, and their locations are shown in Fig. 11b. A set of 300 s of data was collected once an hour with a sampling frequency of 2084 Hz. These data were processed by downsampling from 2084 to 128 Hz to improve the computational efficiency. More information and details about the experiment can be obtained in Refs. [3, 20].

Illustration of the Dowling Hall footbridge: a overview of the bridge [7] and b location of the accelerometers
The vibration response measured by S3 at 15:00 on April 29, 2010, under environmental ambient vibration is used to verify the MSST-based method for structural modal parameter identification. It is also filtered by a bandpass filter with a cutoff frequency range of 2 and 20 Hz to limit the considered modes, as shown in Fig. 12.

Time series of the filtered vibration response measured by S3 on the Dowling Hall footbridge
According to the MSST-based method, the ambient vibration response measured by S3 is converted to a free vibration response using the NExT. In this example, 8-s samples are selected in the NExT, corresponding to 1024 samples for the free vibration response. This period is sufficient for extracting the free vibration response by using the NExT. Then, the MSST is applied to decompose the modes contained in the free vibration response, as shown in Fig. 13, where six modes are obtained. Because of the end effects, only the free vibration response in the range of [1.5, 6] s is presented. In addition, the instantaneous phases and instantaneous amplitudes of modes are estimated by the HT and are given in Figs. 14 and 15, respectively. After the instantaneous phases and instantaneous amplitudes are extracted, curve fitting is employed to calculate the natural frequencies and damping ratios of the Dowling Hall footbridge. In the curve fitting of the instantaneous amplitudes, only the ranges of nearly natural exponential decay are fitted, namely, the linear ranges of the natural logarithm of instantaneous amplitudes. The fitted results are also shown in Figs. 14 and 15.

Decomposed modes by the MSST for the Dowling Hall footbridge

Instantaneous phases extracted by the MSST-based method and their curve fitting results for the Dowling Hall footbridge

Instantaneous amplitudes extracted by the MSST-based method and their curve fitting results for the Dowling Hall footbridge
The MSST-based method is also applied to the other seven accelerometers to obtain modal parameters of the Dowling Hall footbridge. The natural frequencies and damping ratios for the eight accelerometers identified by the MSST-based method are listed in Table 3. It can be seen that the natural frequencies and damping ratios remain the same for different measurements. Hence, the results identified by the MSST-based method are consistent and stable for the footbridge.
The means of the results identified by the MSST-based method are listed in Table 4. For comparison, a covariance-driven stochastic subspace identification algorithm (SSI-cov) is applied [11], which is a powerful tool for modal parameter identification with solid mathematical theories. The results are also listed in Table 4. In addition to the results associated with the MSST-based method and SSI-cov, those corresponding to Ref. [30] are provided for comparison. It is clear that the natural frequencies identified by the MSST-based method, SSI-cov and Ref. [30] are close. In addition, the damping ratios identified by the MSST-based method are nearly the same as those associated with Ref. [30] and are also close to those associated with SSI-cov. These results demonstrate that the MSST-based method can effectively identify the natural frequencies and damping ratios of a real-life structure, which are close to the identified natural frequencies and damping ratios in Ref. [30].
Figure 16 shows the six identified mode shapes of this footbridge. Modes 1 and 2 are the first and second bending, modes 3 and 4 are the first and second torsion, and modes 5 and 6 are the third and fourth bending. These six mode shapes have the same mode as shown in Ref. [3].

Six identified mode shapes for the Dowling Hall footbridge
5 Concluding remarks
In this paper, an accurate and efficient MSST-based modal parameter identification method is proposed. The MSST-based method exploits the benefits provided by the MSST algorithm for signal decomposition. Two numerical investigations are conducted on a simulating signal and a benchmark four-story frame structure to study the performance of the MSST-based method. It is shown that the MSST-based method can identify modal parameters with high accuracy and can also identify modal parameters of a time-varying system. In addition, an experimental validation is conducted on a two-span continuous steel truss bridge. It is shown that the MSST-based method can identify accurate modal parameters for real-life structures. Compared with other results obtained by SSI-cov and Ref. [30], good results were obtained by the MSST-based method. There are several advantages of the MSST-based method: natural frequencies and damping ratios are consistent and stable, there is high accuracy in the identification results, and time-varying structures can also be identified. On the other hand, analyzed signals with low amplitude or closely spaced components are hard to reconstruct for the MSST. Hence, the MSST-based method is not suitable for a mode with these characteristics.
References
Amezquita-Sanchez JP, Park HS, Adeli H (2017) A novel methodology for modal parameters identification of large smart structures using music, empirical wavelet transform, and hilbert transform. Eng Struct 147:148–159
Bagheri A, Ozbulut OE, Harris DK (2018) Structural system identification based on variational mode decomposition. J Sound Vib 417:182–197
Behmanesh Iman, Moaveni Babak (2016) Accounting for environmental variability, modeling errors, and parameter estimation uncertainties in structural identification. J Sound Vib 374:92–110
Caicedo JM, Dyke SJ, Johnson EA (2004) Natural excitation technique and eigensystem realization algorithm for phase I of the IASC-ASCE benchmark problem: simulated data. J Eng Mech 130(1):49–60
Daubechies I, Jianfeng L, Hau-Tieng W (2011) Synchrosqueezed wavelet transforms: an empirical mode decomposition-like tool. Appl Comput Harmonic Anal 30(2):243–261
Dragomiretskiy K, Zosso D (2013) Variational mode decomposition. IEEE Trans Signal Process 62(3):531–544
Johnson EA, Lam HF, Katafygiotis LS, Beck JL (2004) Phase I IASC-ASCE structural health monitoring benchmark problem using simulated data. J Eng Mech 130(1):3–15
Feldman M (2014) Hilbert transform methods for nonparametric identification of nonlinear time varying vibration systems. Mech Syst Signal Proces 47(1–2):66–77
Gilles J (2013) Empirical wavelet transform. IEEE Trans Signal Process 61(16):3999–4010
He XH, Hua XG, Chen ZQ, Huang FL (2011) EMD-based random decrement technique for modal parameter identification of an existing railway bridge. Eng Struct 33(4):1348–1356
Hermans L, Van der Auweraer H (1999) Modal testing and analysis of structures under operational conditions: industrial applications. Mech Syst Signal Process 13(2):193–216
Hilbert D (1912) Begründung der kinetischen gastheorie. Math Ann 72(4):562–577
James GH, Carne TG, Lauffer JP et al (1995) The natural excitation technique (next) for modal parameter extraction from operating structures. Modal Anal Int J Anal Exp Modal Anal 10(4):260
Jin H, Lin J, Chen X, Yi C (2019) Modal parameters identification method based on symplectic geometry model decomposition. Shock Vib 2019(12):1–26
Keyhani A, Mohammadi S (2018) Structural modal parameter identification using local mean decomposition. Meas Sci Technol 29(2):025003
Lazhari M, Sadhu A (2019) Decentralized modal identification of structures using an adaptive empirical mode decomposition method. J Sound Vib 447:20–41
Li H, Li Z, Mo W (2017) A time varying filter approach for empirical mode decomposition. Signal Process 138:146–158
Luo Z, Liu T, Yan S, Qian M (2018) Revised empirical wavelet transform based on auto-regressive power spectrum and its application to the mode decomposition of deployable structure. J Sound Vib 431:70–87
McNeill SI (2016) Decomposing a signal into short-time narrow-banded modes. J Sound Vib 373:325–339
Moaveni B, Behmanesh I (2012) Effects of changing ambient temperature on finite element model updating of the Dowling Hall footbridge. Eng Struct 43:58–68
Pan H, Yang Y, Li X, Zheng J, Cheng J (2019) Symplectic geometry mode decomposition and its application to rotating machinery compound fault diagnosis. Mech Syst Signal Process 114:189–211
Perez-Ramirez CA, Amezquita-Sanchez JP, Adeli H, Valtierra-Rodriguez M, Camarena-Martinez D, Romero-Troncoso RJ (2016) New methodology for modal parameters identification of smart civil structures using ambient vibrations and synchrosqueezed wavelet transform. Eng Appl Artif Intell 48:1–12
Rainieri C, Gargaro D, Fabbrocino G, Maddaloni G, Di Sarno L, Prota A, Manfredi G (2018) Shaking table tests for the experimental verification of the effectiveness of an automated modal parameter monitoring system for existing bridges in seismic areas. Struct Control Health Monit 25(7):e2165
Xin Yu, Hao H, Li J (2019) Operational modal identification of structures based on improved empirical wavelet transform. Struct Control Health Monit 26(3):e2323
Yan B, Miyamoto A (2006) A comparative study of modal parameter identification based on wavelet and Hilbert–Huang transforms. Comput-Aided Civ Infrastruct Eng 21(1):9–23
Yang JN, Lei Y, Pan S, Huang N (2003) System identification of linear structures based on Hilbert-Huang spectral analysis. Part 1: normal modes. Earthq Eng Struct Dyn 32(9):1443–1467
Yang JN, Lei Y, Pan S, Huang N (2003) System identification of linear structures based on Hilbert-Huang spectral analysis. Part 2: Complex modes. Earthq Eng Struct Dyn 32(10):1533–1554
Yang J, Li P, Yang Y, Dian X (2018) An improved EMD method for modal identification and a combined static-dynamic method for damage detection. J Sound Vib 420:242–260
Gang Yu, Wang Z, Zhao P (2018) Multisynchrosqueezing transform. IEEE Trans Ind Electron 66(7):5441–5455
Zhou W, Feng Z, Liu D, Wang X, Chen B (2020) Modal parameter identification of structures based on short-time narrow-banded mode decomposition. Adv Struct Eng 23(14):3062–3074
Acknowledgements
The authors are grateful for the financial support from the National Natural Science Foundation of China through Grant no. 51868045 and from Shaanxi Institute of Technology through Grant no. Gfy20-03.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Sun, H., Di, S., Du, Z. et al. Application of multisynchrosqueezing transform for structural modal parameter identification. J Civil Struct Health Monit 11, 1175–1188 (2021). https://doi.org/10.1007/s13349-021-00500-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13349-021-00500-0