
Abstract
In a large power system voltage sag is considered to be the most common and critical power quality (PQ) issue. With the advent of power-semiconductor devices many PQ devices came into existence. Dynamic voltage restorer (DVR) and distribution static compensator (D-STATCOM) are normally employed as voltage sag mitigation devices. This paper presents a low cost alternative for voltage sag compensation. The proposed device does not require any energy storage device and has only one gate turn-off switch per phase for pulse width modulation, unlike DVR and D-STATCOM that employ DC-to-AC converter topology. Simulation analysis of three phase compensator is performed in MATLAB/Simulink environment and the total harmonic distortion of load voltage when the compensator is functioning during disturbance condition is within the acceptable limits.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Voltage magnitude is one of the major factors that determines the quality of power supply. Loads at distribution levels are usually subjected to frequent voltage sags. Voltage sag contributes more than 80 % of PQ problems that exists in power systems (Dugan et al. 1996). Voltage sag can be defined as a decrease to between 0.1 and 0.9 p.u. in rms voltage at the power frequency for durations of 0.5 cycle to 1 min (IEEE Std. 1159-1995 1995). The principal cause of all voltage sags is a short-duration increase in current. The main contributions are motor starting, transformer energizing, and faults (earth faults and short-circuit faults). The most severe voltage sags are due to short-circuit faults and earth faults (Bollen 2001). Voltage sags are given a great deal of attention because of the wide usage of voltage-sensitive loads such as adjustable speed drives (ASD), process control equipment, and computers. Voltage sags or interruptions that last for only a 100 ms lead to stoppage for hours in the production due to the long start-up times for industrial processes. This results in production losses, which are very expensive.
In order to increase the reliability of a power distribution system, many methods of solving power quality problems, especially voltage sag, has been applied. The conventional methods are by using motor-generator sets, capacitor banks, introduction of new parallel feeders and by installing uninterruptible power supplies (UPS). However, the PQ problems are not solved completely due to uncontrollable reactive power compensation and high costs of new feeders and UPS. The D-STATCOM has emerged as a promising device to provide voltage sag mitigation and other power quality solutions, such as voltage stabilization, flicker suppression, power factor correction, and harmonic control (Chen et al. 2006; Singh et al. 2006; Voraphonpiput and Chatratana 2005). Another device that is commonly used as a solution to the voltage sag is DVR (Chang et al. 2000; Benachaiba and Ferdi 2008; Fitzer et al. 2004), which employs series voltage boost technology using solid state switches to correct the load voltage amplitude as needed. The D-STATCOM and DVR both require a capacitor as the energy storage device for supplying the DC power to the inverter. Both DVR and D-STATCOM have excellent dynamic capability. However they are relatively expensive systems because of the inverter system, which utilizes two PWM switches per phase.
Ultimate solution of power quality improvement is to design a mitigation device which is economic, compact and reliable. In present approach, a novel yet simple mitigation device based on the AC voltage controller principle is used for the mitigation of voltage sag. This is achieved by employing an AC voltage controller (Malik et al. 1985; Dabroom 2008; Lee et al. 2007) and an autotransformer combination (Lee et al. 2007). The proposed system has only one PWM switch per phase with no energy storage, which is a very low cost solution for voltage sag mitigation. Simulations of the compensator are performed using MATLAB/Simulink and performance results are presented.
2 DVR and D-STATCOM
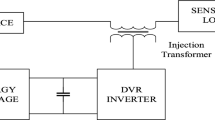
DVR or D-STATCOM can be used to correct the voltage sag at distribution level (Woodley et al. 1999; Chen and Joos 2000; Jenkins 1998; Song and Johns 1999). A DVR is a series device that generates an AC voltage and injects it in series with the supply voltage through an injection transformer to compensate the voltage sag. The injected voltage and load current determine the power injection of the DVR. On the other hand, a D-STATCOM is a shunt device that generates an AC voltage, which in turn causes a current injection into the system through a shunt transformer. The load voltage and injected current determine the power injection of the D-STATCOM. The schematic diagram of a typical DVR and D-STATCOM are shown in Figs. 1 and 2 respectively.

Schematic diagram of a DVR

Schematic diagram of a D-STATCOM
DVR and D-STATCOM employ a voltage source inverter which utilizes two PWM switches per phase. Any power electronic switch for a high voltage application is expensive, and the peripheral circuits such as gate drivers and power supplies are even more expensive than the device itself. They also require a capacitor as the energy storage device for supplying the DC power to the inverter. A rectifier is used to maintain the capacitor voltage constant, or an additional feedback of the capacitor DC voltage is used to supply power to the capacitor Research is in progress to improve the performance of these mitigating devices by using the multi-pulse principle (El-Shamothy et al. 2008; Pan et al. 2007), multi-level technique (Josephm et al. 2005; Yang et al. 2008; Strenberger and Jovcic 2008), and other techniques (Lam et al. 2008; Li et al. 2007; Wang and Venkataramanan 2009). In all these cases, there is an increase in the number of switching devices or capacitors, and hence, the size and complexity of the circuit get increased.
3 Proposed configuration
The proposed device for mitigating voltage sag in the system consists of a PWM switched power- electronic device connected to an autotransformer in series with the load. Figure 3 shows the single phase circuit configuration of the mitigating device and the control circuit logic used in the system. It consists of a single PWM insulated gate bipolar transistor (IGBT) switch in a bridge configuration, a thyristor bypass switch and an autotransformer. A two-winding transformer is connected as an autotransformer to boost the input voltage. It does not offer electrical isolation between primary side and secondary side but has advantages of high efficiency with small volume.

Block diagram of voltage sag compensation scheme
3.1 Principle of operation
Power flow to the load is either through the thyristor-controlled bypass switch or through the PWM-switched autotransformer, which is controlled by the control logic blocks. Load voltage is controlled by controlling the gate pulses to power electronic device IGBT. Power diodes (D1–D4) connected to IGBT switch (SW) controls the direction of power flow which connected in ac voltage controller configuration as shown in Fig. 4. This combination with a suitable control circuit maintains constant rms load voltage. In control circuit, rms value of the load voltage VL is calculated and compared with the reference voltage Vref and gate pulses are generated through PI controller and PWM technique.

Voltage controller mode of operation for voltage sag compensation
Under normal condition when there is no voltage disturbance the power flow is through the anti-parallel thyristors used as the ac bypass switch, shown in Fig. 3. During this normal condition, VL = Vref and the error voltage Verr is zero. Hence gate pulses to IGBT are blocked. Supply voltage VS is considered as normal in the range of 0.9–1.1 p.u., as per the IEEE Standard 1159 specifications. When there is a change of rms value by more than 10 % due to voltage sag caused by fault or an increase in load, the bypass switch is turned off and IGBT is given PWM pulses to regulate the output voltage. The compensator considered is a shunt type, as the control voltage developed is injected in shunt. The voltage and current distribution in the autotransformer is shown in Fig. 5.

Voltage and current relations in an autotransformer
The relationships of the autotransformer voltage and current are expressed as:
Where VP is the primary voltage; VL is the secondary voltage equal to load voltage; a is the turns ratio; I1 and I2 are the primary and secondary currents, respectively; IP and IL are the primary and load currents, respectively; N1 and N2 are number of turns in the primary and secondary windings, respectively.
A transformer with an N1:N2 = 1:1 ratio is used as an autotransformer to boost the voltage on the load side when sag is detected and can mitigate up to a 50 % voltage sag. As the turns ratio of the transformer equals 1:2 in an autotransformer mode, the magnitude of the load current IL (high-voltage side) is the same as that of the primary current I1 (low-voltage side). From Eq. (1), it is clear that VL = 2VP and IS = 2IL. The voltage across the switch in the OFF state is equal to the magnitude of the input voltage. When sag is detected by the voltage controller, the IGBT is switched ON and is regulated by the PWM pulses. The primary voltage VP is such that the load voltage on the secondary of autotransformer is the desired rms voltage.
3.2 Filter design
To reduce harmonic components of the output voltage, two filters are used. One is a notch filter to remove the harmonics and the other is a capacitive, low-pass filter for the fundamental component as shown in Fig. 3 is used. Usually less than 5 % THD of the voltage is required in a power system. Capacitor Cr1 in combination with source inductance and leakage inductance form the low pass filter. The notch filter is designed with a center frequency of PWM switching frequency by using a series LC filter. A resistor may be added to limit the current. The impedance of the filter is given by Eq. (2).
where R, Lr and Cr2 are the notch filter resistance, inductance and capacitances, respectively.
The resonant frequency of the notch filter is tuned to the PWM switching frequency. The capacitor kVA is considered to 25 % of the system kVA. Capacitor value (Ctotal) thus obtained is divided into Cr1 and Cr2 equally. The notch filter designed for switching frequency resonance condition is capacitive in nature for frequencies less than its resonance frequency. Hence at fundamental frequency it is capacitive of value Cr2 and is in parallel with Cr1 resulting to Ctotal.
4 Control philosophy
The control circuit in Fig. 3 evaluates error voltage Verr generated by comparing the measured load voltage rms VL with reference rms value Vref (1 p.u.). PI controller drives the plant to be controlled with a weighted sum of the error (difference between the actual sensed output and desired set-point) and the integral of that value. The PI controller process the error signal generates the required angle to drive the error to zero, i.e., the load rms voltage is brought back to the reference voltage (Pradeep Kumar et al. 2014). An advantage of a proportional plus integral controller is that its integral term causes the steady -state error to be zero for a step input. Output from the controller block is in the form of an angle δ that is used to introduce an additional phase-lag/lead in the three-phase voltages. The sinusoidal signal Vcontrol is phase-modulated by means of the angle δ as:
The modulated angle is applied to the PWM generators in phase A. The angles for other two phases are shifted by 120° and 240° respectively as shown in Fig. 6. It can be seen that the control implementation is kept very simple by using only voltage measurements as the feedback variable in the control scheme.

Phase modulation and control voltage generation
PWM pulses VG generated in the time-ratio control technique are obtained by comparing the control voltage with the carrier frequency signal (triangular voltage, Vtri). The amplitude index is kept fixed at 1 p.u., in order to obtain the highest fundamental voltage component at the controller output.
Where \(\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\text{V}}_{\text{control}}\) is the peak amplitude of the control signal; \(\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{\text{V}}_{\text{tri}}\) is the peak amplitude of the triangular signal;
The pulse width of VG varies based on the Vcontrol magnitude and is applied to the IGBT gate to control the AC voltage controller output. PI controller gain is adjusted by adjusting duty ratio in order to obtain the output voltage of the AC voltage controller VP equal to the 0.5 p.u. of nominal load voltage for any value of input voltage.
5 Simulation analysis and results
The 3-phase, distribution system shown in Fig. 7 is considered for evaluating the potential of the PWM-switched autotransformer to compensate voltage sag and swell disturbances with the peak detection technique. An RL load is considered as a sensitive load, which is to be supplied at constant voltage. Table 1 depicts the system parameter specifications used for simulation.

Block diagram of test system used for simulation in MATLAB
5.1 Case-1
The most severe voltage sags are due to faults. So a voltage sag is created across the secondary terminals of T4 as shown in Fig. 5 by applying a 3-phase to ground fault through a fault resistance for a period of 0.2 s from t 1 = 0.4 s to t 2 = 0.6 s. Figure 8 shows voltage at the sensitive load, indicating voltage sag of 37.5 % from 0.2 to 0.6 s until the fault is cleared. The compensator regulates the load voltage to attain its normal value and the compensated load voltage is shown in Fig. 9. The harmonic analysis has been performed on the compensated load voltage with FFT analysis tool in MATLAB/Simulink and the THD is found to be 0.70 %. Figure 10 shows the harmonic spectrum of the compensated voltage.

Voltage across sensitive load without compensator

Voltage across sensitive load with compensator

THD of compensated voltage
5.2 Case-2
The most common cause of voltage sag is sudden switching of heavy loads. So voltage sag is created during the simulation by sudden application of heavy load across the secondary terminals of T4 as shown in Fig. 5 for a period of 0.2 s from t 1 = 0.4 s to t 2 = 0.6 s. Sudden application of heavy load generated voltage sag of 42.56 % as shown in Fig. 11. The compensator is able to mitigate the voltage sag across the sensitive load thereby maintaining a constant voltage as shown in Fig. 12. THD in this case is found to be 1.06 % as shown in Fig. 13.

Voltage across sensitive load without compensator

Voltage across sensitive load with compensator

THD of compensated voltage
The performance of the compensator for the above mentioned, two different voltage sag conditions is checked, and it is found that the magnitude and total harmonic distortion (THD) of the load voltage are within the limits—IEEE Standards 1159 and 519, respectively—as given Table 2.
6 Conclusion
The overall cost of power electronics-based equipment is nearly linearly dependent on the overall number of switches in the circuit topology. Commonly used sag mitigation technologies DVR and D-STATCOM are inverter based systems that employ two PWM switches per phase. A voltage sag compensator based on AC voltage controller principle is presented as a low cost alternative for voltage sag compensation. The proposed technique is simple, requires only one PWM switch per phase and is economical compared to DVR and D-STATCOM. Simulation results verify that the proposed device is efficient in compensating voltage sag disturbances. The THD of the compensated voltage is within admissible limits.
References
Benachaiba C, Ferdi B (2008) Voltage quality improvement using DVR. Electr Power Qual Util J 14(1):39–45
Bollen MHJ (2001) Voltage sags in three-phase systems. IEEE Power Eng Rev 21(9):8–15
Chang CS, Yang SW, Ho YS (2000) Simulation and analysis of series voltage restorers (SVR) for voltage sag relief. In: IEEE Power Engineering Society Winter Meeting, Singapore, pp 2476–2481
Chen S, Joos G (2000) Series and shunt active power conditioners for compensating distribution system faults. In: Proceedings of the canadian conference on ECE, pp 1182–1186
Chen J, Song S, Wang Z (2006) Analysis and implement of thyristor-based STATCOM. In: International conference on power system technology, Beijing, pp 1–5
Dabroom AM (2008) AC voltage regulator using PWM technique and magnetic flux distribution. In: 13th international power electronics and motion control conference, Poland, pp 1337–1344
Dugan RC, McGranaghan MF, Beaty HW (1996) Electrical power systems quality. McGraw Hill, New York
El-Shamothy MMI, Badran EA, El-Morsi MS (2008) A detailed model of the STATCOM using ATPdraw. In: 12th international middle-east power systems conference, Aswan, Egypt, pp 459–463
Fitzer C, Barnes M, Green P (2004) Voltage sag detection technique for a dynamic voltage restorer. IEEE Trans Ind Appl 40(1):203–212
IEEE Std. 1159-1995 (1995) IEEE recommended practice for monitoring electric power quality, IEEE Std. 1159-1995
Jenkins N (1998) Power electronics applied to the distribution systems. In: IEE colloquium, flexible AC transmission systems, London, pp 311–317
Josephm A, Haneesh AS, Subhash Joshi TG, Unnikrishnan AK (2005) 3-Level STATCOM as a power quality solution of 4 MW induction furnace. In: National power electronics conference, Kharaghpur, India, pp 1–4
Kumar Pradeep, Kumar Niranjan, Akella AK (2014) Six leg DVR topology for compensation of balanced linear loads in three phase four wire system. Int J Syst Assur Eng Manag 5(4):524–533
Lam CS, Wong MC, Han YD (2008) Voltage swell and overvoltage compensation with unidirectional power flow controlled dynamic voltage restorer. IEEE Trans Power Deliv 23(4):2513–2521
Lee DM, Habetler TG, Harley RG, Keister TL, Rostran JR (2007) A voltage sag supporter utilizing a PWM-switched autotransformer. IEEE Trans Power Electron 22(2):626–635
Li YW, Vilathgamuwa DM, Blaabjerg F, Loh PC (2007) A robust control scheme for medium-voltage-level DVR implementation. IEEE Trans Ind Electron 54(4):249–2261
Malik NH, Enamul Haque SM, Shepherd W (1985) Analysis and performance of phase-controlled thyristor ac voltage controllers. IEEE Trans Ind Electron 32(3):192–199
Pan W, Xu Z, Zhang J (2007) Novel configuration of 60-pulse voltage source converter for STATCOM application. Int J Emerg Electr Power Syst 8(5):1–20
Singh B, Adhya A, Mittal AP, Guptha JRP (2006) Power quality enhancement with D-STATCOM for small isolated alternator feeding distribution system. In: International conference on power electronics and drive systems, Delhi, India, pp 274–279
Song YH, Johns AT (1999) Flexible ac transmission systems (FACTS). In: IEE power and energy series 30, London
Strenberger R, Jovcic D (2008) Theoretical framework for minimizing converter losses and harmonics in a multilevel STATCOM. IEEE Trans Power Deliv 23(4):2376–2384
Voraphonpiput N, Chatratana S (2005) STATCOM analysis and controller design for power system voltage regulation. In: IEEE/PES transmission and distribution conference & exhibition, Dailan, China, pp 1–6
Wang B, Venkataramanan G (2009) Dynamic voltage restorer utilizing a matrix converter and flywheel energy storage. IEEE Trans Ind Appl 45(1):222–231
Woodley NH, Morgan L, Sindaram A (1999) Experience with an inverter-based dynamic voltage restorer. IEEE Trans on Power Deliv 14(3):1181–1186
Yang XP, Zhang YX, Zhong YR (2008) Three-phase four-wire DSTATCOM based on a three-dimensional PWM algorithm. In: Electric utility deregulation and restructuring and power technologies, Nanijang, China, pp 2061–2066
Acknowledgments
The authors are thankful to Electrical Engineering Department, National Institute of Technology Jamshedpur, Jharkhand, 831014, India, for providing necessary infrastructure for successfully carrying out this investigation.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mani Sankar, M., Seksena, S.B.L. A cost effective voltage sag compensator for distribution system. Int J Syst Assur Eng Manag 8 (Suppl 1), 56–64 (2017). https://doi.org/10.1007/s13198-015-0373-3
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-015-0373-3