
Abstract
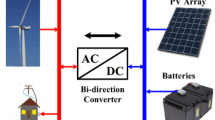
This paper presents a software tool that has been developed for optimal configuration of hybrid power systems. These systems can be either interconnected to the main power grid or operated autonomously, and may contain a variety of components, including dispatchable generators (e.g., diesel generators, microturbines, biogas generators), non-dispatchable renewable energy technologies (e.g., wind turbines, photovoltaics), batteries, converters and dump loads. A software tool that optimizes such systems has been developed in MATLAB, using a combination of genetic algorithms and tabu search. The optimal configuration is expressed in terms of minimum cost of electricity (in €/kWh), taking into account operational and component size constraints. The needed input includes weather data (e.g., solar, wind, and temperature time-series), load data, system components data, and general parameters (e.g., project lifetime, discount rate). As a case study, in this paper the tool is used for evaluating an autonomous hybrid power system that includes renewable energy technologies in Chania region, Crete. Moreover, the performance of the tool is investigated for seven additional scenarios of the case study, via sensitivity analysis, studying the effect on the results of the uncertainty of weather and cost data.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Hybrid power systems use multiple generation sources and can incorporate different components such as production, storage, power conditioning, demand-side management and system control to supply power [1]. These systems can be used in small isolated communities, where renewable energy sources (RES) are often present. Since renewable technologies such as wind turbines (WTs) and photovoltaics (PVs) are dependent on a resource that is not dispatchable, there is an impact on the reliability of the electric energy of the system, which has to be considered [2]. The basic ways to solve this problem is either grid expansion, or installation of conventional generators (such as diesel generators) and/or use of storage as a type of energy-balancing medium. However, in isolated or remote areas, grid expansion can be tooexpensive [1].
The analysis and design of hybrid power systems can be challenging, due to the large number of design options and the uncertainty in key parameters, such as load evolution and future fuel price. The capacity optimization is even more challenging for the case of autonomous systems, which are not connected to the main grid, because these systems have to satisfy their load using only their own resources. Renewable power sources add further complexity because their power output may be intermittent, seasonal, and non dispatchable, and the availability of renewable resources may be uncertain. For these reasons, this paper is focused on the analysis of hybrid autonomous power systems (HAPS) that contain renewable energy technologies.
The problem of optimal HAPS sizing belongs to the category of combinatorial optimization problems, since the sizes of system’s components, which constitute the design variables, can only take discrete values. For the solution of this problem, several methods have been proposed. From the category of conventional combinatorial optimization methods, linear programming [3] and dynamic programming [4] have been used. The use of statistical methods [5] and probability methods [6] has been also proposed. These methods take into account the uncertainty in many key parameters of power system’s operation. Artificial intelligence methods have been also applied, including neural networks [7] and neuro-fuzzy systems [8]. Moreover, this problem has been solved by heuristic methods [9, 10]. All the above conventional methods provide suboptimal solutions, which are usually combined with increased computational complexity. The most direct method for solving HAPS sizing problem is the complete enumeration method that is used by HOMER software [11], however it can be proved extremely time consuming.
In recent years, new methods have been developed, in order to solve many types of complex optimization problems, particularly those of combinatorial nature. These methods are called metaheuristics and include genetic algorithms (GAs), simulated annealing (SA), tabu search (TS), and particle swarm optimization (PSO) among others. Metaheuristics orchestrate an interaction between local improvement procedures and higher level strategies to create a process capable of escaping from local optima and performing a robust search of a solution space. From the area of metaheuristics, GAs [12–14], SA [15], TS [16], PSO [17], as well as hybrid methods [18] have been proposed for the solution of optimal HAPS sizing. Moreover, HOGA software [19] uses a GA in order to minimize the net present cost of a hybrid power system.
This paper presents a software tool that was developed in MATLAB for capacity optimization of hybrid power systems, by using a combination of GAs and TS. The capacity optimization of system components is based on the minimization of the levelized cost of energy, subject to operational and component size constraints. The effectiveness of the software tool is investigated in the sizing of a small autonomous power system, located in Chania, Greece. The design variables of the case study system include the size of its available components, i.e., WTs, PVs, diesel generator, batteries and converter. Moreover, the performance of the software tool is investigated for seven alternative scenarios of the case study system, which analyze the effects on the optimization results of a large number of key and uncertain parameters that include weather and cost data.
The paper is organized as follows: Sect. 2 formulates the HAPS optimal sizing problem and Sect. 3 describes the capabilities of the developed software tool, as well as the modelling of HAPS components. Section 4 presents the main characteristics of the proposed GA and TS metaheuristics for the solution of HAPS sizing problem. Section 5 describes the examined test system and discusses the results provided by the software tool. Section 6 presents the results of sensitivity analysis and Sect. 7 concludes the paper.
2 Problem formulation
This paper deals with HAPS optimal sizing problem that belongs to the category of non-linear combinatorial optimization problems. This optimization problem has to fulfil the objective defined by (1) subject to the constraints (3–6). In particular, the problem is formulated as follows.
2.1 Objective function
Minimization of system’s cost of electricity, COE:
The COE (€/kWh) of HAPS is calculated as follows:
where \(C_{antot} \) (€) is the total annualized cost and \(E_{anloadserved} \) (kWh) is the total annual electric energy production that serves load, i.e., \(E_{anloadserved} \) takes into account the amount of load demand that cannot be satisfied, which means that in case of unmet load, \(E_{anloadserved} \) is smaller than the total annual electric energy demand. \(C_{antot} \) takes into account the annualized capital costs, the annualized replacement costs, the annual operation and maintenance (O&M) costs, and the annual fuel costs (if applicable) of system’s components.
2.2 Constraints
-
1.
Unmet load constraint:
where \(f_{UL} \) is the annual unmet load fraction, \(UL_{\Delta t} \) (kW) is the unmet load during the simulation time step \(\Delta t\) (h), \(E_{anload} \) (kWh) is the total annual electric energy demand, and \(f_{UL\max } \) is the maximum allowable annual unmet load fraction. In this paper, the value of \(f_{UL\max } \) has been taken equal to 5 %.
-
2.
Minimum RES penetration constraint:
where \(f_{RES} \) is the RES penetration of the system, \(E_{anRES} \) (kWh) is the total annual renewable energy production, \(E_{antot} \) (kWh) is the total annual energy production of the system, and \(f_{RES\min } \) is the minimum allowable RES penetration. In this paper, the value of \(f_{RES\min } \) has been taken equal to 80 %. As a result, the energy production of studied HAPS is based mainly on RES technologies.
-
3.
Components’ size constraints:
where \(size_{comp} \) is the size of system’s component \(comp\), and \(size_{comp\max } \) is the maximum allowable size of \(comp\). The values of \(size_{comp\max } \) for the studied system are shown in Table 1.
3 Capabilities of the developed software tool and modelling of HAPS components
In order to model and simulate hybrid power systems, a software tool has been developed in MATLAB. The main graphical user interface of this tool is shown in Fig. 1. This tool can be used either for interconnected or for autonomous power systems that may contain a variety of components, including dispatchable generators (e.g., diesel generators, microturbines, biogas generators), non-dispatchable renewable energy technologies (e.g., WTs, PVs, run-of-river small hydros), batteries, converters, and a variety of loads (AC, DC, thermal, dump). The capacity optimization for any examined system is implemented by a hybrid GA-TS methodology, which will be presented in the next Section.

Interface of the proposed software tool
In our specific case, the examined hybrid power system is considered to be autonomous (HAPS) that has to serve electrical load, and it can contain the following five component types:
-
1.
WTs.
-
2.
Polycrystalline silicon (poly-Si) PVs.
-
3.
Generator with diesel fuel.
-
4.
Lead-acid batteries.
-
5.
Converter.
The modelling of HAPS components is implemented as follows. The WT modelling is implemented using a power curve profile that is based on manufacturer’s data. The selected WT has the following characteristics: rated power 10 kW AC, cut-in speed (\(V_{in} )\) 3 m/s, and cut-out speed (\(V_{out} )\) 24 m/s. For the WT power curve fitting, a seventh order polynomial expression has been selected, as it provides accurate correlation with real data, while it presents exclusively positive values for the generated power in the interval \([V_{in} \;V_{out} ]\).
In PV modelling, the output of the PV array \(P_{PV} \) (in kW) is calculated from [20]:
where \(f_{PV} \) is the PV derating factor, \(P_{STC} \) is the nominal PV array power in kW\(_{p}\) under standard test conditions (STC), \(G_A \) is the global solar radiation incident on the PV array in kW/m\(^{2}\), \(G_{STC} \) is the solar radiation under STC (1 kW/m\(^{2})\), \(T_C \) is the temperature of the PV cells, \(T_{STC} \) is the STC temperature (25 \(^\circ \)C), and \(C_T \) is the PV temperature coefficient (\(-\)0.004/\(^\circ \)C for poly-Si). The PV derating factor is a scaling factor applied to the PV array output to account for losses, such as dust cover, aging and unreliability of the PV array, and is considered to be equal to 0.80. \(T_C \) can be estimated from the ambient temperature \(T_a \) (in \(^\circ \)C) and the global solar radiation on a horizontal plane \(G\) (in kW/m\(^{2})\) using (8) [21]:
where \(NOCT\) is the normal operating cell temperature, which obtains the value of 45 \(^\circ \)C.
The diesel generator fuel consumption \(F\) (L/h) is assumed to be a quadratic function of its electrical power output:
where \(P_{rated} \) is generator’s rated power and \(P\) is generator’s output power. To avoid engine damage, constant-speed diesel generators typically do not operate below a minimum load ratio of their rated capacity. In this paper, this ratio is set equal to 30 %. Figure 2 shows the specific fuel consumprion (SFC, in L/kWh) for the specific generator. As it can been seen, SFC remains constant when diesel generator operates above 60 % of its rated capacity. Lead-acid batteries have been modelled assuming maximum charge and discharge current equal to C/5 [22]. Finally, converter efficiency has been taken equal to 90 % for both directions (inverter and rectifier).

SFC for the considered diesel generator
The simulation process examines a particular system configuration, in which components sizes satisfy constraints (5) and (6). Then, for every time step \(\Delta t\), the available renewable power (from WTs and PVs) is calculated and then is compared with the load. In case of excess, the surplus renewable energy is charging the batteries, if they are not fully charged. If renewable power sources are not capable to fully serve the load, the remaining electric load has to be supplied by diesel generator and/or batteries. From all possible combinations, it is selected the one that supplies the load at the least cost. When the whole year’s simulation has been completed, it is determined whether the system is feasible, i.e., it is checked if it satisfies the constraints (3) and (4). After the end of the simulation, the COE is calculated by taking into account: (1) the annual results of the simulation, (2) the capital, replacement, O&M and fuel cost (if applicable) of each component, (3) the components’ lifetime, (4) the project lifetime, and (5) the discount rate.
An additional aspect of system operation arises, which is whether (and how) the diesel generator should charge the battery bank. Two common control strategies that can be used are load following (LF) strategy and cycle charging (CC) strategy. It has been found [23] that over a wide range of conditions, the better of these two strategies is virtually as cost-effective as an ideal predictive strategy, which assumes the existence of perfect knowledge in future load and wind conditions. In the LF strategy, batteries are not charged at all with diesel-generated energy; the diesel operating point is set to match the instantaneous required load. LF strategy tends to be optimal in systems with a lot of renewable power, when the renewable power output sometimes exceeds the load. In the CC strategy, whenever the diesel generator needs to operate to serve the primary load, it operates at full output power. A set point state of charge, \(SOC_a \), has also to be set in this strategy. The charging of the battery by the diesel generator will not stop until it reaches the specified \(SOC_a \). In this paper, three alternative values of \(SOC_a \) have been considered: 80, 90 and 100 %, so the total number of examined dispatch strategies is 4. CC strategy tends to be optimal in systems with little or no renewable power.
4 Proposed optimization methodology
For the optimization of a considered power system, a hybrid GA-TS methodology is used. In this Section, the main characteristics of GAs and TS are described, as well as the way that they are combined together in order to search for the optimal hybrid power system configuration.
4.1 GA implementation
GAs mimic natural evolutionary principles to constitute search and optimization procedures, and can be classified in two categories:
-
1.
Binary GAs: they borrow their working principle directly from natural genetics, as the variables are represented by bits of zeros and ones. Binary GAs are preferred when the problem consists of discrete variables.
-
2.
Continuous GAs: although they present the same working principle with binary GAs, the variables here are represented by floating-point numbers over whatever range is deemed appropriate. Continuous GAs are ideally suited to handle problems with a continuous search space.
The first step of a GA is the random generation of the initial population. Then a GA follows an iterated procedure that consists of the following steps:
-
1.
Evaluation of objective function.
-
2.
Reproduction of population, which makes duplicates of good solutions and eliminates bad solutions.
-
3.
Crossover, in which existing population members (parents) are mated in order to produce new population members (offspring).
-
4.
Mutation, which randomly changes the values at a small portion of population members.
The considered sizes of each component can take only discrete values, so the binary GA is selected. In the proposed GA, each chromosome consists of six genes, of which the first five genes represent the HAPS component sizes (WT, PV, diesel generator, batteries and converter), while the sixth gene refers to adopted dispatch strategy. For the constraint handling, the penalty function approach is adopted, in which an exterior penalty term that penalizes infeasible solutions is used. Since different constraints may take different orders of magnitude, prior to the calculation of the overall penalty function all constraints are normalized.
4.2 TS implementation
TS is a powerful optimization procedure that has been successfully applied to a number of combinatorial problems. It uses an operation called move to define the neighbourhood of any given solution. TS can be viewed as an iterative technique that explores a set of problem solutions by repeatedly making moves from one solution to another, in the manner of a greatest-descent algorithm. TS is characterized by the ability to escape from local optima and the occurrence of cycles, which usually cause simple descent algorithms to terminate. This goal is obtained by using a finite-size list of forbidden moves, called tabu moves, derived from the recent history of the search. The basic underlying assumption is that the suboptimal points, where the simple greatest-descent algorithm stops, can be better starting points with respect to random restarts, provided that care is taken so that the local minima do not become attractors of the dynamics included by the algorithm, and that limit cycles do not arise [24].
The two main components of the TS are the tabu list restrictions and the aspiration criteria of the solution associated with these restrictions. The tabu list restrictions could be stated directly as a given change of moves or indirectly as a set of logical relationships or linear inequalities. The tabu list is also referred to as the adaptive memory in a sense that some attributes are temporarily fixed as long as they are in the tabu list. Tabu lists are managed by recording moves in the order in which they are made. If a new attribute enters into the tabu list, the oldest one is released from the tabu list. The proper choice of the tabu list size is critical to the success of the algorithm and it depends on the specific problem.
Aspiration criteria can override tabu restrictions. That is, if a certain move is forbidden, the aspiration criteria, when satisfied, can reactivate this move. The appropriate use of such criteria can be very important for enabling a TS method to achieve its best performance levels. The most widely used aspiration criterion removes a tabu classification from a trial move when a move yields a solution better than the best obtained so far. However, other aspiration criteria have been also proposed [24].
In the proposed TS methodology for HAPS optimal sizing, the neighbourhood of a current solution contains all configurations of similar component sizes, as well as the alternative dispatch strategies options. More specifically, a move is defined by selecting each time the next larger size (if permitted) and the previous smaller size (if permitted) of a component size, while for the dispatch strategy a move is defined by examining the three remaining options of the current strategy. Since the HAPS contains five components (Sect. 3), at maximum 10 configurations with different component sizes are considered that are added to the three remaining dispatch strategies, consequently the maximum number of configurations that belong to the neighbourhood of current solution is 13.
The TS algorithm is composed of the following steps:
-
1.
Determination of the tabu list size.
-
2.
Generation of an initial feasible solution, and calculation of its COE.
-
3.
Setting of the global best solution equal to the initial solution (current solution).
-
4.
Finding of a set of feasible trial solutions that are neighbours to the current solution and sorting of them in ascending order of COE.
-
5.
Checking if the selected move of the first trial solution belongs to the tabu list. If it belongs and the aspiration criterion (Step 6) is not satisfied, a selection of the next solution of the sorted set of trial solutions has to be done. Otherwise, the solution is accepted (current solution) and the update of the tabu list is performed by adding in it the chosen move, and by removing from it the oldest move, with respect to tabu list size.
-
6.
Examination of the aspiration criterion. In the proposed algorithm a move aspiration is satisfied if the move yields a solution better than the best obtained so far.
-
7.
Update of the global best solution if the best acceptable solution found from the trial set has a lower COE value.
-
8.
Repeat Steps 4–7. Stop the procedure if the termination criterion is satisfied. In this paper the search is terminated if a maximum predefined allowable number of iterations is reached.
4.3 Hybrid GA-TS methodology
Hybrid optimization methods combine the advantages of individual optimization methods in order to find the optimal solution in a fast and effective manner. GAs are stochastic methods that excel at gravitating towards the global optimum. However, these methods are not especially fast at finding the optimum in a given solution region. For this reason, GAs are often combined with local search. More specifically, the GAs find the region of the optimum, and then the local optimizer takes over to find the optimum. During the local search procedure, the quality of the initial solution is essential for its successful implementation. Then the local search method is proceeding iteratively from one solution to another until a chosen termination criterion is satisfied. In this paper, the combination of GAs with TS is implemented. More specifically, GA provides the initial solution. In order to improve the quality of results, the conventional local search method has been replaced by TS. TS can be seen as an extension of local search, as its inherent adaptive memory ensures that the search will not return periodically and stack to the same solutions.
5 Results and discussion
5.1 Case study system
In the considered HAPS, the project lifetime and the discount rate are assumed to be 20 years and 5 %, respectively. The simulation time step \(\Delta t\) is taken equal to 10 min (1/6 h). The annual wind, solar and ambient temperature data needed for the estimation of WT and PV performance refer to measurements for the mountainous region of Keramia (altitude 500 m), in Chania, Crete, Greece. The annual HAPS peak load has been considered equal to 30 kW, whereas the necessary HAPS load profile was computed by downscaling the actual annual load profile of Crete Island, which is the largest autonomous power system of Greece, with 600 MW peak load and 17 % min/max annual load. An additional noise has been added in the load profile, in order to reduce the min/max annual load ratio from 17 % (Crete power system) to 12 % (HAPS). It should be noted that the proposed methodology is general and it can be also applied to different geographical locations using the following data: (1) wind, solar, ambient temperature and load time-series, (2) the longitude, latitude and time zone of the region (needed for the calculation of the global solar radiation incident on the PV array \(G_A )\), and (3) the altitude of the region (needed for the correction of the WT output due to atmospheric pressure variation).
The WT hub height has been considered 30 m, and the PVs do not include tracking system. The cost, lifetime, and size characteristics for each component are presented in Table 1. For each component, the minimum size is equal to zero. Moreover, with the exception of diesel generator, all components have constant increment of their size, as Table 1 shows. The considered sizes for the diesel generator are 0, 5, 8, 10, 15, 20, 25, and 30 kW. For the optimal design problem of the HAPS of Table 1, the complete enumeration method requires:
i.e., approximately 4 million evaluations in order to find the optimal COE; in (10) Disp. denotes the number of dispatch strategies. The computational time for each COE evaluation is approximately 1.4 s. Consequently, the evaluations of the complete enumeration method require more than 2 months. That is why it is essential to develop an alternative optimization method (hybrid GA-TS methodology) in order to solve the HAPS optimal design problem in a fast and effective way.
5.2 Hybrid GA-TS methodology results
The optimum configuration parameters of the adopted GA are: population size equal to 50, number of generations equal to 15, Gray coding, tournament selection, uniform crossover, and 0.01 mutation rate [12], which leads to 800 performed evaluations of objective function (COE). Regarding TS, it has been found that the optimal tabu list size is six, as smaller tabu list sizes stick in a local optimum, while larger tabu list sizes do not search thoroughly the optimal solution neighborhood. The number of TS iterations was kept equal to 10 (up to 130 COE evaluations), as it was proved to be adequate for all considered scenarios (case study system and sensitivity analysis scenarios). As a result, the maximum total number of performed COE evaluations is 930, which is a very small portion compared to 4 million evaluations that required by complete enumeration. The required time for the hybrid GA-TS methodology is approximately 20 min.
The GA convergence for the case study system is shown in Fig. 3. For the specific scenario, TS does not improve the above solution, i.e., GA solution represents optimal solution. The obtained configuration consists of 3 WTs, 15 kW\(_{p}\) PVs, diesel generator of 5 kW, 48 batteries, converter of 23 kW, LF dispatch strategy, and the resulting COE is 0.1756 €/kWh. Regarding the share of annual energy production among components of the above configuration, non-dispatchable renewable energy technologies (WTs and PVs) produce directly 38 %, batteries produce 44 %, and diesel generator produces 18 %.

GA convergence for the case study system
In order to evaluate the proposed software tool, a similar case study was implemented in HOMER software. The search space was limited around the optimal solution found by the hybrid GA-TS methodology; otherwise the complete enumeration method that is used by HOMER would make the whole process prohibitive in terms of computational time. The study of the results, which are listed in Table 2, shows that HOMER computes a COE value that is approximately 10 % higher. The main differences between the two configurations of Table 2 are that in HOMER the diesel generator has larger size and produces more electricity, while the contribution of batteries is restricted, which explains the lower size of the converter. These differences can be explained mainly from the different batteries models between the two softwares (HOMER uses a more detailed model), as well as from the different diesel generator modelling (HOMER assumes linear function of fuel consumption, whereas the proposed tool considers a quadratic function).
6 Sensitivity analysis
The uncertainty in many HAPS variables over which the designer has no control makes essential the need for sensitivity analysis. The uncertain parameters may contain weather data, components efficiency and/or cost data. In this section, seven alternative scenarios have been developed and analysed. These scenarios are based on the following modifications of the case study system of Sect. 5.1 (initial scenario):
-
1.
10 % increase of wind speed.
-
2.
10 % decrease of wind speed.
-
3.
5 % increase of solar radiation.
-
4.
5 % decrease of solar radiation.
-
5.
Installation of a 2-axis PV tracking system (additional PV capital and replacement cost: 800 €/kW\(_{p}\), additional PV annual O&M cost: 25 €/kW\(_{p}\), annual PV energy production is increased over 31%).
-
6.
Increase of diesel fuel price from 1.5 to 2.0 €/L.
-
7.
50 % capital and replacement cost reduction of renewable energy technologies (WTs and PVs).
The first four scenarios consider modified wind and solar data series compared to the initial scenario. Scenario 5 is a combination of increased efficiency and increased cost for the PVs. In scenario 6, the effect of increased diesel fuel cost is examined. Scenario 7 considers a reduction of capital and replacement cost of renewable energy technologies that may be attributed either to technology improvement and economies of scale or to a modification in the regulatory regime that promotes the installation of RES technologies by offering incentives that reduce their capital and replacement cost.
Table 3 presents the minimum COE values, their corresponding optimal configurations, and the optimization methodology from which the optimal configuration was obtained. As it can be seen, in the majority of cases (6 out of 8) the optimal solution has been taken directly GA. However, the small additional computational burden of TS, as well as the provided assurance that the obtained solution is optimal amongst its neighbourhood, makes its utilization essential.
The study of Table 3 draws the following main conclusions for the considered scenarios:
-
1.
The wind potential (scenarios 1 & 2) affects more the value of COE in comparison with the solar potential (scenarios 3 & 4).
-
2.
The adoption of a 2-axis PV tracking system (scenario 5) reduces the installed PV capacity (due to higher PV efficiency) and produces significantly higher COE values. As a result, the installation of such a system is not advisable.
-
3.
In four scenarios the optimal solution contains no diesel generators. In the majority of these cases, the number of batteries is increased.
-
4.
The configurations in all examined scenarios contain 2-4 WTs, adequate capacity of PVs (in case of fixed slope PV panels), large number of batteries, converters of similar sizes, and adoption of LF dispatch strategy.
7 Conclusions
This paper dealt with the presentation of a software tool that was implemented in MATLAB, in order to evaluate optimal configuration of hybrid power systems that contain renewable energy technologies. In this specific study, small autonomous power systems were studied, as their limitations make the task of optimal sizing even more challenging. Apart from the base case study system, a large number of alternative scenarios was developed through a detailed sensitivity analysis study, in order to investigate the uncertainty in key input parameters.
In all examined small autonomous hybrid power system configurations, the target was their economic and reliable operation throughout the year, with high penetration of renewable technologies. The analysis of results showed the significant contribution of WTs, PVs and batteries. The share of conventional diesel generators proved to be negligible or small in all cases.
Regarding the developed software tool, it was proved that it presents adequate capabilities for the design of hybrid power systems. However, future versions can also include a number of additional characteristics, such as additional types of loads (hydrogen loads, deferrable loads), additional electricity storage technologies (flywheels, supercapacitors, etc), additional system components (electrolyzer, hydrogen tank, reservoir hydros, etc), and capability of handling multi-objective optimization problems (i.e., problems that include financial and environmental criteria).
References
Ackermann, T.: Wind power in power systems, 2nd edn. Wiley, Chichester (2012)
Katsigiannis, Y.A., Georgilakis, P.S., Tsinarakis, G.J.: A novel colored fluid stochastic Petri Net simulation model for reliability evaluation of Wind/PV/Diesel small isolated power systems. IEEE Trans. Syst. Man Cybern. Part A 40(6), 1296–1309 (2010)
Akella, A.K., Sharma, M.P., Saini, R.P.: Optimum utilization of renewable energy sources in a remote area. Renew. Sustain. Energy Rev. 11, 894–908 (2007)
Bakirtzis, A.G., Dokopoulos, P.S.: Short term generation scheduling in a small autonomous system with unconventional energy sources. IEEE Trans. Power Syst. 3(3), 1230–1236 (1988)
Shrestha, G.B., Goel, L.: A study on optimal sizing of stand-alone photovoltaic stations. IEEE Trans. Energy Convers. 13(4), 373–378 (1998)
Bagul, A.D., Salameh, Z.M., Borowy, B.: Sizing of a standalone hybrid wind-photovoltaic system using a three-event probability density approximation. Solar Energy 56, 323–335 (1996)
Hontoria, L., Aguilera, J., Zufiria, P.: A new approach for sizing standalone photovoltaic systems based in neural networks. Solar Energy 78, 313–319 (2005)
Mellit, A.: Artificial intelligence based-modeling for sizing of a standalone photovoltaic power system: proposition for a new model using neuro-fuzzy system (ANFIS). In: Proceedings of the 3\(^{\rm rd}\) International IEEE Conference on Intelligent Systems, 1, 605–611 (2006)
Kellogg, W.D., Nehrir, M.H., Venkataramanan, G., Gerez, V.: Generation unit sizing and cost analysis for stand-alone wind, photovoltaic, and hybrid wind/pv systems. IEEE Trans. Energy Convers. 13(1), 70–75 (1998)
Ashok, S.: Optimised model for community-based hybrid energy system. Renew. Energy 32, 1155–1164 (2007)
HOMER Energy: hybrid optimization of multiple energy resources software. http://www.homerenergy.com Accessed 6 Aug 2014
Katsigiannis, Y.A., Georgilakis, P.S., Karapidakis, E.S.: Genetic algorithm solution to optimal sizing problem of small autonomous hybrid power systems. Lecture Notes Artif. Intell. 6040, 327–332 (2010)
Koutroulis, E., Kolokotsa, D., Potirakis, A., Kalaitzakis, K.: Methodology for optimal sizing of stand-alone photovoltaic/wind-generator systems using genetic algorithms. Solar Energy 80, 1072–1088 (2006)
Katsigiannis, Y.A., Georgilakis, P.S., Karapidakis, E.S.: Multiobjective genetic algorithm solution to the optimum economic and environmental performance problem of small autonomous hybrid power systems with renewables. IET Renew. Power Gener. 4(5), 404–419 (2010)
Katsigiannis, Y.A., Georgilakis, P.S., Karapidakis, E.S.: A simulated annealing algorithm for optimal sizing of a small isolated power system. In: Proceedings of the 6th Japanese-Mediterranean Workshop on Applied Electromagnetic Engineering for Magnetic, Superconducting and Nano Materials (JAPMED’6), (2009)
Katsigiannis, Y.A., Georgilakis, P.S.: Optimal sizing of small isolated hybrid power systems using tabu search. J. Optoelectron. Adv. Mater. 10, 1241–1245 (2008)
Hakimi, S.M., Moghaddas-Tafreshi, S.M.: Optimal sizing of a stand-alone hybrid power system via particle swarm optimization for Kahnouj area in south-east of Iran. Renew. Energy 34, 1855–1862 (2009)
Katsigiannis, Y.A., Georgilakis, P.S., Karapidakis, E.S.: Hybrid simulated annealing—tabu search method for optimal sizing of autonomous power systems with renewables. IEEE Trans. Sustain. Energy 3(3), 330–338 (2012)
HOGA: Hybrid-renewable optimization by genetic Algorithms. http://m.hoga-renewables.es.tl Accessed 6 Aug 2014
Thomson, M., Infield, D.G.: Impact of widespread photovoltaics generation on distribution systems. IET Renew. Power Gener. 1, 33–40 (2007)
Markvart, T., Castañer, L.: Practical handbook of photovoltaics: fundamentals and applications. Elsevier, UK (2003)
Masters, G.M.: Renewable and efficient electric power systems. Wiley, New Jersey (2004)
Barley, C.D., Winn, C.B.: Optimal dispatch strategy in remote hybrid power systems. Solar Energy 58, 165–179 (1996)
Glover, F., Laguna, M.: Tabu search. Kluwer Academic Publishers, Boston (1997)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Katsigiannis, Y.A., Kanellos, F.D. & Papaefthimiou, S. A software tool for capacity optimization of hybrid power systems including renewable energy technologies based on a hybrid genetic algorithm—tabu search optimization methodology. Energy Syst 7, 33–48 (2016). https://doi.org/10.1007/s12667-014-0138-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12667-014-0138-0