
Abstract
This article presents a background subtraction method to detect moving objects across a stationary camera view. A hybrid pixel representation is presented to minimize the effect of shadow illumination. A non-recursive background model is developed to address the problem with gradual illumination change. Modified Z-score labeling is employed to analyze the sample variation of the temporal sequence to build a multi-modal background. The same measure is further applied to detect the foreground pixels against the stationary background classes. Morphological filtering is employed to suppress the sensor noise as well as to fill the camouflage holes. A decision rule is formulated that considers the period of being stationary of a foreground object and the period of being absence of a background class to tackle the object relocation problem. The proposed approach along with nine other state-of-the-art methods are compared on various image sequences taken from the Wallflower and the I2R datasets in terms of recall, precision, figure of merit, and percentage of correct classification. The tabular results, as well as the obtained figures demonstrate the efficacy of the proposed scheme over its counterparts.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Visual surveillance aims at extracting useful information from an enormous amount of video data by automatically detecting and tracking objects of interest, analyzing their activities, and producing a semantic description (Wang 2013; Doretto et al. 2011; Albano et al. 2014). It has enormous applications both in public and private establishments, such as land security, traffic management, crime prevention, effective decision-making, accident prediction, monitoring threats, and so forth (De Smedt et al. 2014; Varga and Szirányi 2017). A typical surveillance system comprises a set of cameras alongside the connected computers to process and monitor the ongoing activities. In this article, we focus on the very first step of an automated surveillance system i.e. moving object detection.
In the absence of any a priori scene knowledge, the most widely used method for moving object detection is background subtraction (Sajid and Cheung 2015). It consists of three steps; background initialization, foreground extraction, and background maintenance (Kumar and Yadav 2017). A model of the observed scene is estimated using few initial frames during background initialization. The subsequent frames are then compared with the modeled background to detect the foreground objects. The next stage is to update the modeled background to adapt any means of changes that may occur in the observed scene. The performance of background subtraction is usually influenced by a number of factors, such as shadow, camouflage, uninteresting background movement, object relocation, and gradual illumination change.
In this article, we propose a background subtraction model to detect the foreground objects in the presence of the above factors. A hybrid color space is suggested for appropriate pixel representation. The sample variation of pixel sequence along the temporal domain is taken into consideration in the modeling of a dynamic background. A non-recursive outlier labeling methodology is adapted to extract the potential foreground, and the frequency of objects’ appearance is applied to update the modeled background.
We will briefly discuss related literature in the next section, prior to presenting our proposed scheme in Sect. 3. The simulation results are presented in Sect. 4. Finally, Sect. 5 concludes the paper.
2 Related literature
Precise background modeling and its periodic maintenance are essential to accurate object detection (Choudhury et al. 2016; Goyal and Singhai 2017; Setitra and Larabi 2014; Sobral and Vacavant 2014; Elgammal 2014). We will now describe the various approaches in the literature.
In approaches using single Gaussian and mixture of Gaussians, pixel sequence along the temporal domain is modeled using Gaussian distribution (Wren et al. 1997). Each background location is parameterized by two model parameters, namely: mean \(\mu\) and variance \(\sigma ^2\), of the temporal sequence. However, single Gaussian fails to capture waving background due to the presence of non-relevant oscillation. Stauffer and Grimson introduced a multi-label background using a mixture of Gaussians (MoG) that classifies the initialization sequence into multiple numbers of Gaussians (Stauffer and Grimson 1999, 2000). Zivkovic and Heijden also suggested an algorithm to compute the correct number of Gaussian distributions at each location, based on their sample variation over time (Zivkovic 2004; Zivkovic and van der Heijden 2006).
In the codebook model, each background location is modeled using a set of codewords such as the minimum and maximum intensity value, the occurrence frequency, the first and last access times to the codeword, and the maximum negative run length time (Kim et al. 2005; Wu and Peng 2010; Fernandez-Sanchez et al. 2013). For example, in Shah et al. (2015), a self-adaptive codebook model is presented where a modified color space is used for pixel representation, and a block-based initialization algorithm uses a self-adaptive algorithm to update the model parameters.
In buffer based subtraction approaches, each background location is modeled using the recent pixel history in a finite buffer. The absolute difference between the current pixel and buffer median decides whether it is stationary (Lo and Velastin 2001). Subsequently, the median measure is replaced by the medoid to represent the background (Cucchiara et al. 2003; Calderara et al. 2006). Toyama et al. apply a linear predictive model using Wiener filter (Toyama et al. 1999), where the coefficients are estimated using the sample covariance. Such modeling is further applied in a relevant subspace using principal component analysis (Zhong and Sclaroff 2003). In another work, Wang and Suter developed a model using the notion of consensus to counter the problem with illumination change and background relocation (Wang and Suter 2006, 2007). Buffer based methods generally adapt well to the slow varying illumination at the cost of high memory overhead.
Non-parametric background models do not assume any prior shape distribution, unlike the default Gaussian model (McHugh et al. 2009; Heikkil and Pietikinen 2006). The kernel density estimation (KDE) techniques usually take sufficient temporal sequences to converge to the underlying target distribution. The kernel bandwidth is inversely related to the number of training samples (i.e. a wider bandwidth yields an over-smoothed distribution, whereas a narrow bandwidth leads to a jagged density estimation). Piccardi and Zan estimated the kernel bandwidth as a function of the median of the absolute difference between the successive frames (Elgammal et al. 2000). Subsequently, the mean-shift paradigm is adapted to estimate the underlying distribution using fewer training samples (Piccardi and Jan 2004). In another work, a fast Gauss transform technique was applied to improve the computation burden (Elgammal et al. 2001). Parag et al. proposed a boosting based ensemble learning to select appropriate features for the KDE methods (Parag et al. 2006).
Zhang and Xu apply the fuzzy Sugeno integral to model the observed scene (Hongxun and De 2006). In a separate work, the Sugeno integral is replaced by the Choquet integral to obtain better results (El Baf et al. 2008). In another work, color, texture, and edge features are fused with Choquet integral for object detection task (Azab et al. 2010). Bouwmans et al. applied another type-2 fuzzy model to compute the correct number of background classes to model a multi-modal scene (Bouwmans and El Baf 2009; El Baf et al. 2009). Kim and Kim apply the fuzzy color histogram to model the dynamic background (Kim and Kim 2012). In another work, color difference histogram is first used to capture the multi-modal background, and then the Fuzzy C-means is employed to reduce the large dimensionality of the histogram bins (Panda and Meher 2016).
For learning model approaches, the initialization pixel sequence is trained across a classifier to learn the shape distribution of the underlying background. Culibrk et al. apply a multi-layered feed forward network with 124 neurons (Culibrk et al. 2007). In other words, a probabilistic neural network (PNN) is learned to create the background model, and a Bayesian classifier is applied to separate the moving objects. In another work, a self-organization map network is trained to learn a background location (Maddalena and Petrosino 2008, 2010). They further apply a spatial coherence analysis to reduce the false alarms.
From the existing literature, it is clear that parametric models generally rely heavily on their underlying assumptions and, thereby, limiting the operating flexibility in varying environments. Non-parametric models, on the other hand, accept sufficient training samples to estimate the underlying distribution. The unimodal background fails to model a dynamic scene, whereas the multi-modal background needs to compute the oscillation periodicity for each location. Recursive models fail to tackle the gradual illumination variation, whereas non-recursive models adapt such eventual variations at the price of high memory overhead. Pixel-based schemes compare the pixel values along the temporal axis, whereas the region-based methods compute the sample variation both along the temporal domain and spatial neighborhood.
3 Proposed scheme
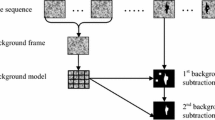
In this section, we present a comprehensive background model (hereafter referred to as CBGM) to extract the set of moving components across a stationary field of view. The proposed framework of background subtraction is shown in Fig. 1.

Framework of the proposed background model
3.1 Hybrid pixel representation
Background models usually suffer from shadow illumination. The underlying region significantly deviates from the modeled background; thereby, falsely appearing as foreground. The light illumination is the primary source of shadow impression, given by
where \(R_o,\,G_o,\,B_o\) denote the original form of red, green, and blue channel respectively, and \(\alpha\) represents the illumination factor. Any invariant form that can nullify the effect of \(\alpha\) can be a suitable measure of pixel representation.
In our work, we adapt an invariant color model \(c_1c_2c_3\) (Gevers and Smeulders 1999) that depends on the chromatic content only, given by
The division operation in Eq. (2) negates the illumination factor; thus, minimizing the shadow effect. However, the \(c_1c_2c_3\) model remains in-determinant across the achromatic axis, more generally for low \(R,\,G,\,B\) pixel values. Therefore, it is necessary to store the original observed intensities to represent pixels across the achromatic axis. Accordingly, we express a pixel value (say q) in a hybrid color space, given by
We set \(\beta = 30\) such that the sum of absolute difference between each pair of RGB channel with less than 30 unit would represent the achromatic axis.
3.2 Multi-modal decision in a dynamic background

Flowchart: computing least background separation threshold
Waving of leaves, water flow in fountain, and fluttering of flags, are few real-world examples that can be considered as non-relevant (or uninteresting) movements. A Unimodal system is not capable of addressing the problem with such background oscillation.
We consider few initial training samples (say N), \(\mathbf {Q}=\{q_{_1},q_{_2},\ldots ,q_{_N}\}\) at each location to model the background. Let \(\mathbf {L} = \{l_{_1},l_{_2},\ldots ,l_{_K}\}\) be the required K background classes for each model location due to background oscillation (\(K < N\)). It can be realized that the oscillation periodicity may not be uniform across the background. Therefore, the value of K may vary across model location. We devise a procedure to compute a least background separation threshold (LBST) to determine the required number of background classes each waving location should have.
The initialization sequence \(\mathbf {Q}_{xy}\) may contain RGB values as well as \(c_1c_2c_3\) values. Accordingly, we need to compute six Least Background Separation Threshold (LBST) across both color space and for each color channel: \(\tau ^{c_{_1}}_{xy},\tau ^{c_{_2}}_{xy},\tau ^{c_{_3}}_{xy},\tau ^R_{xy},\tau ^G_{xy},\tau ^B_{xy}\). The estimated thresholds are then applied during background initialization phase (see Algorithm 1 in Sect. 3.3) that evidently distributes the input pixel sequence to the correct number of background classes. Modified Z-score labeling is applied during threshold estimation. This measure is again applied during foreground extraction phase (Sect. 3.4), where the reasoning in selecting various parameters is elaborated. The details of LBST computation are presented in Fig. 2. Also, in Table 1, the first column reflects the steps numbering as shown in Fig. 2, and the second column describes the significance of the corresponding steps.
3.3 Background initialization
The strength of background initialization is relative to its modeled parameters. Most existing schemes consider mean \((\mu )\) and standard deviation \((\sigma )\) of the temporal sequence to model the background. These two parameters are recursively updated for newly identified background pixels over the frame axis. It can be realized that such recursive update may yield biased model parameters over a longer period (Szwoch et al. 2016). In other words, the model attributes may include the distant past pixel contribution and become skewed towards old observations. Furthermore, recursive parameters (\(\mu\) and \(\sigma ^2\)) are very sensitive to the inclusion of even single exception. As a consequence, a newly declared stationary pixel may appear as an outlier against the biased distribution. In this paper, we suggest a non-recursive background model, based on non-recursive model parameters median and MAD (median of absolute deviation from median) that stores only the recently accessed background pixels in a finite queue to classify the next pixel.
Each background class \(l_j\) contains the recently accessed background pixels in a finite queue (say length W) along with one additional attribute, namely: occurrence frequency of the class \(f_j\). A new pixel is compared with the available background classes at the respective location to find its “belongingness”, if any. In the event of a no match, the test pixel is enqueued as the first element in a new background class at the respective location. Background initialization is described in Algorithm 1.

3.4 Foreground extraction
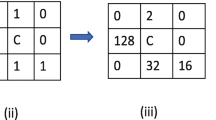
Moving objects significantly differ from the modeled background in terms of visual appearance. In particular, a foreground behaves as an outlier with respect to all background classes available at the corresponding location. Existing methods, based on recursive model parameters mean \(\mu\) and standard deviation \(\sigma\), compute the Z-score to separate the foreground objects (Stauffer and Grimson 1999, 2000). Usually, the absolute value of Z-score (\(Z_{\mu , \sigma }= \frac{q-\mu }{\sigma }\), q being the current pixel) that exceeds an empirical threshold 2.5 is declared as foreground. However, it has been observed that the mean and standard deviation of a sequence often become inflated by a few or even a single extreme value(s). It may so happen that the less extreme outliers may remain undetected in the presence of the most extreme outlier and vice versa. In our work, this issue is resolved by using the modified Z-score (\(Z_{\mathrm {md,MAD}}\)), which is based on median (\(\mathrm {md}\)) and median of the absolute deviation around median (\(\mathrm {MAD}\)); median and \(\mathrm {MAD}\) are directly relative to the number of samples in the observed set rather than the sample itself. Seo has elaborated in his work the superiority of modified Z-score over traditional Z-score (Seo 2006).
If \(\mathbf {A} =\{a_1,a_2,\ldots , a_n\}\) represents a sequence of observations, then
The modified Z-score (\(Z_{\mathrm {md,MAD}}\)) for a new observation (say \(a_{new}\)) with respect to sequence \(\mathbf {A}\) is expressed as,
The MAD approximates 0.6745 times the standard deviation for pseudo-normal observations (Leys et al. 2013).
The use of modified Z-score in foreground labeling requires the knowledge of (1) an empirical threshold that separates a foreground pixel against a background class, and (2) the length of the temporal queue W (maximum size of a background class) based on which the threshold is computed. Iglewicz and Hoaglin (1993) empirically evaluated that a sample for which \(\left| Z_{\mathrm {md,MAD}}\right|>3.5\) is labeled as a potential outlier against a sequence of pseudo-normal samples of size ranging from 10 to 40. Accordingly, we take the foreground-labeling threshold = 3.5, and length of temporal queue (W) = 25.
A new pixel \(q_{xy}\) at \((x,\,y)\) may represent either a \((c_1c_2c_3)\) or a (R, G, B) triplet (see Eq. 3). Furthermore, the background model \(\mathcal {M}_{xy}\) at \((x,\,y)\) may contain a mixture of \(c_1,\,c_2,\,c_3\) classes as well as \(R,\,G,\,B\) classes. All these instances need to be taken into consideration when preparing a decision rule (Table 2) for foreground extraction.
3.4.1 Background update
Background model might change after initialization with object relocation. An existing background object can either be relocated to another location within the camera view or taken away from the observed view. Similarly, a new background object may be introduced in the view. Such dynamic behavior of the background objects demands an update strategy to relabel the changed location as background. Furthermore, the rapid illumination variation, such as cloud movements or lights ON/OFF events, completely alters the appearance of the observed scene. It may so happen that the entire frame may be significantly deviated from the modeled background, and thereby appear as a single foreground object. In our work, the frequency-rate of appearance is suitably formulated to relabel the background with the advent of any of the above situations.
A foreground model \(\mathcal {H}\) is designed, following the similar architecture in congruent to background model \(\mathcal {M}\) that stores the labeled foreground pixels along with other model attributes. The occurrence frequency of a relocated or new background object should be high enough to ensure its relabeling as background again. On the contrary, once an existing background object is removed from the underlying scene, its occurrence frequency will no longer increment with time. These two scenarios are taken into consideration to govern a decision rule for background update, given below:
Step-1: For a new pixel \(\,q_{xy}\,\) at \((x,\,y)\),
-
1.
If \(q_{xy}\) is declared as background, enqueue \(q_{xy}\) in the matched background class following the steps (14) through (17) of Algorithm 1.
-
2.
If \(q_{xy}\) is declared as foreground, find a matching foreground class at \(\mathcal {H}_{xy}\), and update it. For no match, create a new foreground class at \(\mathcal {H}_{xy}\) and enqueue \(q_{xy}\).
Step-2: Update \(\,\mathcal {M}\,\) and \(\,\mathcal {H}\,\), as given below.
-
1.
Remove the high frequency classes from \(\,\mathcal {H}_{xy}\,\) and add to \(\,\mathcal {M}_{xy}\,\)
$$\begin{gathered} {\mathcal{M}}_{{xy}} \leftarrow {\mathcal{M}}_{{xy}} + \left\{ {c_{j} |c_{j} \in {\mathcal{S}}_{{xy}} ,\quad f_{j} \ge \frac{N}{2}} \right\} \hfill \\ {\mathcal{H}}_{{xy}} \leftarrow {\mathcal{H}}_{{xy}} - \left\{ {c_{j} |c_{j} \in {\mathcal{H}}_{{xy}} ,\quad f_{j} \ge \frac{N}{2}} \right\} \hfill \\ \end{gathered}$$ -
2.
Remove the background classes that have not been accessed for a defined period from \(\,\mathcal {M}_{xy}\,\). \(\,\mathcal {M}_{_{xy}}\leftarrow \mathcal {M}_{_{xy}} - \left \{c_{_j}|c_{_j} \in \mathcal {M}_{_{xy}}, f_j < \frac{t - (N-1)}{2}\right \}\), where t represents the current frame number.
3.5 Morphological refinement
The background noise often leads to some false positives as well as false negatives during foreground extraction. Moreover, parts of the foreground may look identical to that of the underlying background with the same chromatic content, and thereby may possess holes inside the detected object. We apply three morphological filters (square structuring element, size \(5 \times 5\)) to suppress such false alarms.
-
(a)
Morphological opening: to reduce the noise and scattered error pixels.
-
(b)
Morphological closing: to join the disconnected foreground pixels.
-
(c)
Morphological filling: to fill the camouflage holes surrounded by foreground pixels.
4 Simulation results
The proposed model along with some state-of-the-art methods are evaluated using exhaustive simulations on several image sequences. The obtained results are then analyzed in subsequent paragraphs. Prior to this, we briefly describe the benchmark datasets and performance metrics used in our simulation.
4.1 Datasets used
Datasets along with the ground-truth annotations are essential for qualitative as well as quantitative analysis of any algorithm. In the present work, eight video clips from Wallflower (Toyama et al. 1999) and I2R (Li et al. 2003) datasets are used for simulation. Each of these image sequences portrays a typical scenario of video surveillance application. The details of the simulated image sequences along with the associated challenges are described in Table 3.
TimeOfDay: The gradual variation of sunlight illumination across a day is depicted in the TimeOfDay sequence. The video shows a relatively dark empty room being brightened gradually and revealing the various objects present in it. Towards the end, a man enters and occupies a couch.
MovedObject: A man enters the room, displaces the chair and phone (background objects) from their original locations, and leaves.
WavingTrees: The waving tree needs to be incorporated into a multi-modal background.
Camouflage: A man is walking across the computer monitor. The color of the person’s shirt matches with the rolling interference bars on the computer screen. Besides, the foreground object casts shadow on the side wall.
Campus: An outdoor scene wherein a number of objects move on the road in presence of waving leaves.
Hall: The pedestrian movement can be observed from the very first frame of the sequence. In addition, the moving objects cast shadow on the ground surface.
Fountain: The background motion owing to water flow has to be omitted while identifying the true mobile objects under consideration.
Curtain: This video clip portrays the problem of (1) background oscillation owing to the curtain movement, and (2) camouflage due to the chromatic similarity between the underlying background and the mobile foreground.
4.2 Comparative analysis
The proposed method is compared with few state-of-the-art schemes: improved adaptive Gaussian mixture model (IGMM, Zivkovic 2004), Bayesian modeling of dynamic scenes (BMOD, Sheikh and Shah 2005), self organizing background subtraction (SOBS, Maddalena and Petrosino 2008), fuzzy spatial coherence based foreground separation (SOBSCH, Maddalena and Petrosino 2010), two variants of ViBe Barnich and Van Droogenbroeck 2011 (i.e. ViBeR - based on RGB color space, and ViBeG - based on gray color space), intensity range based background subtraction (LIBS, Hati et al. 2013), block-based classifier cascade with probabilistic decision integration (BCCPDI, Reddy et al. 2013), and incremental and multi-feature tensor subspace learning (IMTSL, Sobral et al. 2014).
Background subtraction is a binary classification task in which each pixel of an incoming frame is either labeled as stationary or non-stationary. The following parameters (Table 4), in the form of a confusion matrix, are usually taken into consideration to check the efficacy of any classification model.
A set of four performance metrics, derived from the above parameters, is selected to evaluate the proposed framework.
PCC or percentage of correct classification, defines the percentage of correctly detected pixels over the frame resolution.
Recall outputs the proportion of detected true positives as compared to the total number of foreground pixels present in the ground-truth.
Precision measures the ratio of number of detected true positives to the total number of foreground pixels detected by an algorithm.
\(\,F_1\,- \textbf{Score}\) , also known as figure of merit, considers both Precision and Recall to compute the score. Higher the score, better is the algorithm.
In few scenarios, the ground-truth does not have any foreground pixel. As a result, the count of TP, as well as FN, become zero, which in turn lead to erratic behavior of recall and precision. The recall rate, as expressed in Eq. (7), yields the in-determinant \(\frac{0}{0}\) form. On the other hand, the precision rate [see Eq. (8)] results in zero with non-zero false positives. In the present simulation, the above behavior is experienced only in MovedObject sequence, where we add 1 (a small quantity) to both the numerator and denominator of Eqs. (7) and (8), respectively. The so formed recall rate, in MovedObject sequence, becomes 100% for all simulated methods since all of them have successfully identified zero TP. On the other hand, the modified precision rate is a function of the number of false positives detected by an algorithm.
The proposed scheme, along with state-of-the-art methods, are simulated on the benchmark image sequences listed in Sect. 4.1. A comparative summary for performance (w.r.t. PCC, Recall, Precision, and Figure of merit) is presented in Tables 5, 6, 7, and 8. The average performance for each metric is presented in Fig. 3. In addition, the obtained binary images are depicted in Figs. 4, 5, 6, 7, 8, 9, 10 and 11.

Average results of simulated algorithms computed across all image sequences

Results of various schemes for the TimeOfDay video from Wallflower dataset (Toyama et al. 1999)

Results of various schemes for the MovedObject video from Wallflower dataset (Toyama et al. 1999)

Results of various schemes for the WavingTrees video from Wallflower dataset (Toyama et al. 1999)

Results of various schemes for the Camouflage video from Wallflower dataset (Toyama et al. 1999)

Results of various schemes for the Campus video from I2R dataset (Li et al. 2003)

Results of various schemes for the Hall video from I2R dataset (Li et al. 2003)

Results of various schemes for the Fountain video from I2R dataset (Li et al. 2003)

Results of various schemes for the Curtain video from I2R dataset (Li et al. 2003)
The average recognition rate, as shown in Fig. 3, yields the following observations. Eight of the ten methods have at least 90% correct classification rate (PCC rate). BMOD, ViBeR, ViBeG, and IMTSL have high recall rate but low precision rate. BCCPDI and the proposed CBGM, on the other hand, yield satisfactory recall and precision rate. In terms of \(F_1\) metric, CBGM, BCCPDI, and ViBeR are the most promising approaches.
Shadow effects: IGMM, BMOD, SOBS, SOBSCH, and ViBe (both variants) use the luminance measure, and unsurprisingly poor results are observed in the Camouflage sequence. LIBS is an exception to this, since this approach first computes the minimum and maximum background intensity at each location. The minimum value is further reduced to accommodate the shadow illumination. This alteration in the range works, however, it is highly parametric and does not perform equally in all scenarios. In our approach, we took the \(C_1C_2C_3\) measure, a function of the chromatic content, to represent each pixel, and hence, nullifies the effect of shadow illumination.
Uninteresting movement: Campus, Fountain, Curtain, and WavingTrees are the sequences, where the possibility of oscillating backgrounds being recognized as foreground objects are high. Most of the methods use a multi-modal background to solve this problem. The least background deviation threshold, in our work, approximates the limit to the number of background classes a model location should have.
Sunlight illumination: Variation of sunlight illumination over a day is a perfect example of gradual illumination variation. As evident from Fig. 4, most of the methods perform moderately in tackling this situation. Recursive models may fail to cope with such eventual variations owing to biased model parameters over a longer surveillance duration. In the present work, we follow a non-recursive architecture, where a background class stores only the recent pixel history in a sliding queue to classify a forthcoming pixel.
Background relocation: The MovedObject sequence depicts the background relocation problem as shown in Fig. 5. IGMM, BMOD, IMTSL and CBGM produce a satisfactory result. We approach this problem by using an additional foreground model to store the non-stationary pixels. The high miss-rate of an existing background class and high hit-rate of a foreground class ensure the necessary relabeling.
Running time: The proposed algorithm is executed with MATLAB R2014a on a computer having configuration Intel Core i7 (64-bit, 3.40 GHz), 8 GB RAM. The average running time of each of the methods is listed in Table 9. IGMM, ViBeR, and ViBeG followed by SOBS, SOBSCH have very low processing time. Our proposed scheme consumes around 14 ms per frame that comes next to the above methods. The processing time can be further reduced with codes optimization and parallelization.
Parameter selection: One of the major concerns in background modeling is the choice of initialization frames (N), which is influenced by the following environmental factors. Higher foreground density during initialization requires more number of frames to capture the rearward background locations. The spread of background oscillation is the second factor that is again directly relative to the number of frames enforced to record all possible variations at a pixel location. The third factor is the maximum duration of frames, where a foreground remains stationary during its course of movement. These factors lead to an understanding that suitable choice of N requires some prior knowledge of the scene under observation. In this work, we varied the value of N from 20 to 150 at a discrete interval and found that the first 50 frames are adequate to model the background for the image sequences available in Wallflower and I2R datasets.
5 Conclusion
In this paper, we presented an effective background model to detect moving objects across a fixed camera view. An invariant color model is suggested to counter the shadow illumination. Its in-determinant behavior along the achromatic axis is addressed with the intensity feature. The uninteresting movement addressed using a multi-modal background. Unlike traditional equi-distribution methods, the proposed solution analyzes the temporal pixel sequence and assigns appropriate number of classes to each location. The problem of gradual illumination variation is addressed using a non-recursive architecture, where each background class is represented by a temporal queue that stores only the recently accessed background pixels. A modified Z-score is employed to separate the foreground pixels against the developed model. The duration of a foreground object being stationary and the period of absence of a background class have been mathematically formulated to counter the object relocation issues. Morphology is applied as a post-improvisation module to remove the cluttered noise, to join the disconnected foreground pixels, and to fill the camouflage holes.
Our approach is validated through extensive simulations on standard image sequences and the results are compared with some of the state-of-the-art methods. Accuracy measures such as Precision, Recall, Figure of merit, and Percentage of correct classification substantiate the efficacy of the proposed method over its counterparts.
References
Wang X (2013) Intelligent multi-camera video surveillance: a review. Pattern Recogn Lett 34(1):3–19
Doretto G, Sebastian T, Tu P, Rittscher J (2011) Appearance-based person reidentification in camera networks: problem overview and current approaches. J Ambient Intell Hum Comput 2(2):127–151
Albano P, Bruno A, Carpentieri B, Castiglione A, Castiglione A, Palmieri F, Pizzolante R, Yim K, You I (2014) Secure and distributed video surveillance via portable devices. J Ambient Intell Hum Comput 5(2):205–213
De Smedt F, Struyf L, Beckers S, Vennekens J, De Samblanx G, Goedemé T (2014) Faster and more intelligent object detection by combining opencl and kr. J Ambient Intell Hum Comput 5(5):635–643
Varga D, Szirányi T (2017) Robust real-time pedestrian detection in surveillance videos. J Ambient Intell Hum Comput 8(1):79–85
Setitra I, Larabi S (2014) Background subtraction algorithms with post-processing: a review. In: 22nd international conference on pattern recognition (ICPR), IEEE, pp 2436–2441
Sobral A, Vacavant A (2014) A comprehensive review of background subtraction algorithms evaluated with synthetic and real videos. Comput Vis Image Underst 122:4–21
Elgammal A (2014) Background subtraction: theory and practice. Synth Lect Comput Vis 5(1):1–83
Wren C, Azarbayejani A, Darrell T, Pentland A (1997) P finder: real-time tracking of the human body. IEEE Trans Pattern Anal Mach Intell 19(7):780–785
Stauffer C, Grimson W (1999) Adaptive background mixture models for real-time tracking. IEEE Comput Soc Conf Comput Vis Pattern Recogn 2:246–252
Stauffer C, Grimson W (2000) Learning patterns of activity using real-time tracking. IEEE Trans Pattern Anal Mach Intell 22(8):747–757
Zivkovic Z (2004) Improved adaptive Gaussian mixture model for background subtraction. Int Conf Pattern Recogn IEEE 2:28–31
Zivkovic Z, van der Heijden F (2006) Efficient adaptive density estimation per image pixel for the task of background subtraction. Pattern Recogn Lett 27(7):773–780
Kim K, Halidabhongse T, Harwood D, Davis L (2005) Real-time foreground-background segmentation using codebook model. Real Time Imaging 11(3):172–185
Wu M, Peng X (2010) Spatio-temporal context for codebook-based dynamic background subtraction. AEU Int J Electron Commun 64(8):739–747
Fernandez-Sanchez E, Diaz J, Ros E (2013) Background subtraction based on color and depth using active sensors. Sensors (Basel, Switzerland) 13(7):8895–8915
Lo B, Velastin S (2001) Automatic congestion detection system for underground platforms. International symposium on intelligent multimedia. video and speech processing, IEEE, pp 158–161
Cucchiara R, Grana C, Piccardi M, Prati A (2003) Detecting moving objects, ghosts, and shadows in video streams. IEEE Trans Pattern Anal Mach Intell 25(10):1337–1342
Calderara S, Melli R, Prati A, Cucchiara R (2006) Reliable background suppression for complex scenes. In: ACM international multimedia conference and exhibition, pp 211–214
Toyama K, Krumm J, Brumitt B, Meyers B (1999) Wallflower: principles and practice of background maintenance. IEEE Int Conf Comput Vis 1:255–261
Zhong J, Sclaroff S (2003) Segmenting foreground objects from a dynamic textured background via a robust Kalman filter. IEEE Int Conf Comput Vis 1:44–50
Wang H, Suter D (2006) Background subtraction based on a robust consensus method. Proc Int Conf Pattern Recognn 1:223–226
Wang H, Suter D (2007) A consensus-based method for tracking: modelling background scenario and foreground appearance. Pattern Recogn 40(3):1091–1105
McHugh J, Konrad J, Saligrama V, Jodoin PM (2009) Foreground-adaptive background subtraction. IEEE Signal Process Lett 16(5):390–393
Heikkil M, Pietikinen M (2006) A texture-based method for modeling the background and detecting moving objects. IEEE Trans Pattern Anal Mach Intell 28(4):657–662
Elgammal A, Harwood D, Davis L (2000) Non-parametric model for background subtraction. Lecture notes in computer science (including subseries lecture notes in artificial intelligence and lecture notes in bioinformatics) 1843:751–767
Piccardi M, Jan Z (2004) Mean-shift background image modelling. Int Conf Image Process IEEE 5:3399–3402
Elgammal A, Duraiswami R, Davis LS (2001) Efficient non-parametric adaptive color modeling using fast Gauss transform. IEEE Comput Soc Conf Comput Vis Pattern Recogn IEEE 2:II-563
Parag T, Elgammal A, Mittal A (2006) A framework for feature selection for background subtraction. IEEE Comput Soc Conf Comput Vis Pattern Recogn IEEE 2:1916–1923
Hongxun Z, De X (2006) Fusing color and texture features for background model. Lecture notes in computer science (including subseries lecture notes in artificial intelligence and lecture notes in bioinformatics) 4223 LNAI:887–893
El Baf F, Bouwmans T, Vachon B (2008) Foreground detection using the Choquet integral. In: International workshop on image analysis for multimedia interactive services, IEEE, pp 187–190
Azab MM, Shedeed H, Hussein AS, et al (2010) A new technique for background modeling and subtraction for motion detection in real-time videos. In: 17th IEEE international conference on image processing, IEEE, pp 3453–3456
Bouwmans T, El Baf F (2009) Modeling of dynamic backgrounds by type-2 fuzzy Gaussians mixture models. MASAUM J Basic Appl Sci 1(2):265–276
El Baf F, Bouwmans T, Vachon B (2009) Fuzzy statistical modeling of dynamic backgrounds for moving object detection in infrared videos. In: IEEE computer society conference on computer vision and pattern recognition workshops, IEEE, pp 60–65
Kim W, Kim C (2012) Background subtraction for dynamic texture scenes using fuzzy color histograms. IEEE Signal Process Lett 19(3):127–130
Culibrk D, Marques O, Socek D, Kalva H, Furht B (2007) Neural network approach to background modeling for video object segmentation. IEEE Trans Neural Netw 18(6):1614–1627
Maddalena L, Petrosino A (2008) A self-organizing approach to background subtraction for visual surveillance applications. IEEE Trans Image Process 17(7):1168–1177
Maddalena L, Petrosino A (2010) A fuzzy spatial coherence-based approach to background/foreground separation for moving object detection. Neural Comput Appl 19(2):179–186
Li L, Huang W, Gu I, Tian Q (2003) Foreground object detection from videos containing complex background. In: ACM international multimedia conference and exhibition, pp 2–10
Gevers T, Smeulders A (1999) Color-based object recognition. Pattern Recogn 32(3):453–464
Leys C, Ley C, Klein O, Bernard P, Licata L (2013) Detecting outliers: do not use standard deviation around the mean, use absolute deviation around the median. J Exp Soc Psychol 49(4):764–766
Iglewicz B, Hoaglin DC (1993) How to detect and handle outliers, vol 16. American Society for Quality Control Press, Milwaukee
Sheikh Y, Shah M (2005) Bayesian modeling of dynamic scenes for object detection. IEEE Trans Pattern Anal Mach Intell 27(11):1778–1792
Barnich O, Van Droogenbroeck M (2011) ViBe: a universal background subtraction algorithm for video sequences. IEEE Trans Image Process 20(6):1709–1724
Hati K, Sa P, Majhi B (2013) Intensity range based background subtraction for effective object detection. IEEE Signal Process Lett 20(8):759–762
Reddy V, Sanderson C, Lovell B (2013) Improved foreground detection via block-based classifier cascade with probabilistic decision integration. IEEE Trans Circuits Syst Video Technol 23(1):83–93
Sobral A, Baker C, Bouwmans T, Zahzah EH (2014) Incremental and multi-feature tensor subspace learning applied for background modeling and subtraction. Lecture notes in computer science (including subseries lecture notes in artificial intelligence and lecture notes in bioinformatics) 8814:94–103
Choudhury SK, Sa PK, Bakshi S, Majhi B (2016) An evaluation of background subtraction for object detection vis-a-vis mitigating challenging scenarios. IEEE Access 4:6133–6150
Seo S (2006) A review and comparison of methods for detecting outliers in univariate data sets. Dissertation of M. Sc., Graduate School of Public Health, University of Pittsburgh, Pittsburgh, Pennsylvania, US
Goyal K, Singhai J (2017) Review of background subtraction methods using Gaussian mixture model for video surveillance systems. Artif Intell Rev:1–19. doi:10.1007/s10462-017-9542-x
Kumar S, Yadav J S (2017) Background Subtraction Method for Object Detection and Tracking. In: Proceeding of international conference on intelligent communication, control and devices:1057–1063
Szwoch G, Ellwart D, Czyżewski A (2016) Parallel implementation of background subtraction algorithms for real-time video processing on a supercomputer platform. J Real Time Image Process 11(1):111–125
Panda DK, Meher S (2016) Detection of moving objects using fuzzy color difference histogram based background subtraction. IEEE Signal Process Lett 23(1):45–49
Sajid H, Cheung S.C.S (2015) Background subtraction for static and moving camera. IEEE Int Conf Image Process:4530–4534
Shah M, Deng JD, Woodford BJ (2015) A Self-adaptive CodeBook (SACB) model for real-time background subtraction. Image Vis Comput 38:52–64
Acknowledgements
This work is supported by the Science and Engineering Research Board (SERB) of India under Grant Number SB/FTP/ETA-0059/2014.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Choudhury, S.K., Sa, P.K., Choo, KK.R. et al. Segmenting foreground objects in a multi-modal background using modified Z-score. J Ambient Intell Human Comput 15, 1213–1227 (2024). https://doi.org/10.1007/s12652-017-0480-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12652-017-0480-x