
Abstract
The present study investigated whether red sea bream Pagrus major could learn about feeding and avoidance area through video model observation. In Experiment 1, 45-mm standard length (SL) fish were trained to learn about a feeding area in a tank. In Experiment 2, 114-mm SL juveniles were trained to avoid a hand net by moving into a shelter. Three treatments were established in each experiment: (i) live model observer: fish observed the behavior of a real fish in an adjacent tank; (ii) video model observer: fish observed video playback of a conspecific on a monitor; and (iii) non-observing control. Ten observational trials were performed in both experiments for the live and video model observer. Afterwards, fish from all treatments were conditioned by feed or avoidance training. In Experiment 1, there was no difference in the feed learning process among treatments. In contrast, in Experiment 2, live and video model observers acquired avoidance learning more quickly than control. The result indicates that the video model can be as efficient as the live model for observational learning in fish. This study suggests that video playback may be useful for anti-predator training of seedlings for stock enhancement.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
In stock enhancement, released seedlings often suffer high mortality due to maladaptive behavior towards natural preys and predators [1–3]. Such behavioral deficiencies in reared fish can possibly be improved before release. Training has been considered one of the options to improve the quality of seedlings [4–6]. Through feed training before release, released fish can forage more effectively for natural foods in their living environment. Moreover, fish trained to respond adequately to a threat stimulus would be able to avoid novel predators.
Observational learning is the acquisition of behavior through the observation of other individual(s). For instance, nine-spined stickleback Pungitius pungitius learns food patch quality by observing the success of others [7]. Fish can acquire information more effectively by observational learning than no observed learning [8]. The observational learning has drawn attention as a training method for released seedlings in stock enhancement, especially for the conditioning of predator information [9, 10]. In practice, however, it is difficult to train fish by observational learning using a live model because of the limitations of time and space.
In this study, we propose training method by observational learning using video playback model. Video playback can be an effective tool of observational learning because it is easily repeatable in a limited space. Past studies have shown that fish can recognize conspecific and heterospecific fish in video playback as much as live fish in an adjacent tank [11–15].
Whereas past studies have found that fish show certain responses to model fish in video playback, to the best of our knowledge, no study has revealed whether fish can acquire the information by observational learning of video model. The present study investigated the observational learning of video model in Pagrus major for feed training (Experiment 1) and avoidance training (Experiment 2). In each experiment, the observational trials were established as the following treatments: (i) live model observation treatment, where the observer fish was allowed to directly observe behavior of a live fish in the adjacent model fish tank; and (ii) video model observation treatment, where the observer fish observed fish behavior on video playback. Their learning processes for these observational treatments were compared with (iii) non-observing control fish in both experiments.
Materials and methods
Experiment 1: Feed training
Fish
Fertilized P. major eggs were purchased from Pacific Trading Co. (Fukuoka, Japan), and the eggs were stocked in four 500-L transparent polycarbonate tanks supplied with filtered seawater at the Maizuru Fisheries Research Station (MFRS) of Kyoto University. After hatching on October 13, 2010, larvae were provided with rotifers Brachionus plicatilis, Artemia sp. nauplii, and dry pellets (N400 and N700, Kyowa Hakko Bio Co., Ltd., Tokyo, and Otohime S1, Marubeni Nisshin Feed Co., Ltd., Tokyo, Japan), in accordance with growth. The water temperature was maintained at 24 °C using a heater and thermostat. Fish attained about 40 mm standard length (SL) on January 6, 2011. They could feed on enough amounts of pellets at one time at this size and thus suitable for this experiment. Fish SL was 44.6 ± 5.8 mm (average ± standard deviation) at the experiment, and there was no difference of size among live model observer, video model observer and control treatments (ANOVA: F 2, 14 = 1.15, P > 0.05).
Experimental tank
Four transparent polypropylene experimental tanks (length × width × height: 30 × 20 × 20 cm) were set in a room with a 12:12 h light/dark regime. These tanks were covered with black vinyl sheets, and seawater was filled to a depth of 15 cm with circulating filtered seawater. Each tank was used as model fish tank, live model observer tank, video model observer tank or control fish tank. The live model observer tank was located next to the model fish tank, and that of the video model observer faced a 26-inch waterproof monitor (Disign, Inc., Kanagawa, Japan). One of the long sides of each observer tank faced a model fish tank or a video monitor, respectively. The black vinyl sheets between each observer tank and model tank or video monitor were removable, and the sheets were used as blind sheets except for the observational trial.
A grey polyvinyl chloride (PVC) pipe (diameter × height: 3 × 2 cm) covered by a white PVC board was set at the center of each tank as a feeding base (Fig. 1). A grey PVC pipe (diameter × height: 2.5 × 15 cm) was placed on the feeding base. In experiments, three to five pellets (Otohime S1) were dropped on the feeding base through the pipe which prevented feeding of fish before the training. On a training, the pellets on the feeding base were exposed to the fish by removing the PVC pipe.

Schematic drawings of treatments in Experiment 1: a live model observer, b video model observer, and c control. A PVC pipe was placed on a feeding base at the center of the tank. The pipe was removed, and the pellets were presented to the fish
Model fish training
A single fish randomly selected from a rearing tank was introduced into the model fish tank. The fish was trained to forage the pellets on the feeding base. We defined a training trial as a sequence that the fish starts to forage the pellets on the feeding base after the removal of the PVC pipe. Afterwards, the PVC pipe was placed back on the feeding base. Training trials were repeated at 30-min intervals with this procedure the model fish was trained to feed on pellets on the feeding base within 30 s after PVC pipe removal in four consecutive trials.
For the video model, the feeding behavior of the model fish was recorded from the lateral side by a video camera (HDR-CX550, SONY Co., Tokyo, Japan); ten unique events of the model fish performing the task were recorded.
Observational trials
The observational trials were conducted for the live model observer and video model observer treatments (Fig. 2). A single fish randomly selected from a rearing tank was introduced into each model observer and control fish tanks on the day before the experiment. These fish were allowed to acclimatize overnight, and then a few pellets were provided before initiating the experiment. If the fish ate these pellets, the observational trials were started except for control fish. The blind sheet between each observer tank and the model fish tank or the monitor was removed 30 min before the beginning of observational trials; thereby, each observer fish was able to see live model fish or video monitor through the transparent tank wall.

Flowchart of the procedure in Experiment 1. The Experiment 2 was also conducted with the same procedure except for having 20 conditioning trials
The observational trial for the live model observer was a sequence where model fish foraged pellets on the feeding base after removing the PVC pipe in the adjacent model tank. In the video model observer treatment, the observer fish observed the above sequence on the video monitor. An observational trial lasted 1 min, and ten trials were conducted for both observational treatments, with 5-min intervals.
Test and conditioning trials
After the tenth observational trial, blind sheet was set between each observer tank and model fish tank or video monitor, and 30 min later, we tested whether each observer and control fish could respond to the feeding base without pellets as follows. The test trial lasted 60 s following removal of the PVC pipe. If fish pecked on the feeding base within the 60 s, the fish was considered to have learned about the feeding base. If it did not, the fish was considered not to have learned, and was then the fish was conditioned to forage the pellets on the feeding base after the test trial. Conditioning trials were provided in the same manner as the model training. Conditioning trials were repeated four times at 30-min intervals followed by the next test trial. A set of four conditioning trials followed by one test trial was defined as one session. If the fish did not forage the pellets within 30 min, the fish was considered to be under stress and was replaced by a new one. Two sessions were conducted in a day, and the experiment was repeated for a maximum of four consecutive days until the fish met the definition of learning, equivalent to a maximum of nine test trials. At the end of the experiment, fish body length was measured. Five replications were conducted for each observer and control treatments.
Analyses
The proportion of fish to have learned the feeding base was compared among live model observers, video model observers, and non-observing controls from the first to the ninth test trial, using survival analysis. In the survival analysis, the Cox proportional hazard model likelihood ratio test with the Breslow method was performed using the “Survival” package for R statistical software, version 3.0.0 (R Development Core Team 2013).
Experiment 2: Avoidance training
Fish
Hatchery-reared P. major juveniles, hatched on June 10, 2010, were transported from Miyazu National Center for Stock Enhancement to the MFRS. Fish were kept in 500-L transparent polyethylene tanks. The fish were fed as in Experiment 1, until December 26, 2010. Fish SL was 114.2 ± 6.7 mm (average ± standard deviation), and there was no difference of size among treatments (ANOVA: F 2, 17 = 0.05, P > 0.05).
Experimental tank
Eight glass experimental tanks (length × width × height: 60 × 30 × 36 cm) were set in a room with 12:12 h light/dark regime and were allocated for four conditions with duplication as model fish tanks, live model observer tanks, video model observer tanks and control fish tanks. These tanks were covered with black vinyl sheets, and seawater was filled to a depth of 25 cm with circulating filtered seawater. The live model observer tank was located next to the model fish tank, and that of the video model observer faced a 26-inch waterproof monitor (Disign, Inc., Kanagawa, Japan). One of the long sides of each observer tank faced a model fish tank or on a video monitor. The black vinyl sheets between each observer tank and model tank or video monitor were removable, and the sheets were used as blind sheets except for the observational trial.
A half-cut transparent polyethylene case (length × width × height: 15 × 20 × 20 cm) attached to a black polyethylene board (length × height: 30 × 20 cm) with a hole (length × height: 5 × 10 cm) was set in the experimental tank as a shelter (Fig. 3). A black PVC board (length × height: 7 × 30 cm) was set as a door in front of the hole to prevent fish from entering the shelter, before experiment.

A schematic drawing of experimental tank in Experiment 2. A sheltering area was placed at one end of the tank. On a conditioning trial, the fish was chased by a hand net from the opposite end of the tank towards the shelter
Model fish training
A single fish randomly selected from a rearing tank was introduced into the model fish tank. The fish was trained to escape into the shelter when chased by a hand net (length × height: 30 × 30 cm), after removing the door. A training trial was composed of the following sequence: the door was removed, and after 30 s, a hand net was introduced at the opposite side of the shelter and the net was left for 15 s; the hand net was then moved slowly to 22.5 cm from the shelter during the following 15 s. If the fish did not enter the shelter with this, the hand net was moved to 3 cm from the shelter until the fish escaped into the shelter. The escaped fish was allowed to stay inside the shelter for 5 min. If the fish did not go out from the shelter within 5 min, fish was gently forced out using a black polyethylene board. The door was placed back to the entrance for closing. Training trials were repeated at 30-min intervals; the model fish was trained to escape into the shelter from hand net within 30 s after removing the door for at least four consecutive trials.
For the video model, the escaping behavior of the model fish was recorded by a video camera (HDR-CX550, SONY Co., Tokyo, Japan); ten unique trials of the model fish performing the task were recorded. Video playback from the first to the fifth trial was recorded from the lateral side, and a recording from the oblique backward side was conducted from the sixth to tenth trial. This was because the observer fish might have difficulty in understanding the entrance to the shelter in a two-dimensional video monitor.
Observational trials
The same three treatments as in Experiment 1 were conducted. One fish was introduced into the live model observer, video model observer and control fish for each from the stock tank on the day before the experiment. These fish were allowed to acclimatize overnight. The fish were provided with observational trials 30 min after removing the blind sheet except for control fish. The observational trial for the live model observer was a sequence where model fish escaped into the shelter from the hand net within 30 s, in the adjacent model tank. In the video model observer condition, the observer fish observed the above sequence on the video monitor. An observational trial lasted 1 min, and ten trials were conducted for both observational treatments in 5-min intervals.
Conditioning trials
After the tenth observational trial, the blind sheet was resumed, and conditioning trials were started 30 min afterwards. Conditioning trials were conducted in the same manner as the model training.
For each conditioning trial, the duration from removing the door to escaping into the shelter was recorded as the escape latency. Ten conditioning trials were conducted per day with 30-min intervals for two consecutive days. This means that avoidance conditioning consisted of 20 trials for each fish. A single fish was used for one replication, and six replications were conducted for all treatments. Fish body length was measured after the experiment.
Analyses
The escape latency was used to evaluate avoidance learning; latency is expected to decrease as the fish learns how to avoid the hand net by entering the shelter. The escape latency from the first to the 20th trial was analyzed using generalized linear mixed models (GLMM) with the “lme4” package for R statistical software. The error distribution of response variables was fitted to the Poisson distribution, with restricted maximum likelihood parameter estimation. The two fixed factors were “trial” (1 to 20) and “treatment” (live model observer, video model observer, and control). We treated “individual” as random factor since individual fish were repeatedly measured. Tukey’s test was performed for “treatment” by general linear hypotheses (GLHT) using the “multcomp” package.
Results
Experiment 1: Feeding training
For the feed learning, the proportion of trained fish during nine test trials was not significantly different among observational treatments (Cox proportional hazard model likelihood ratio test = 0.03 on 2 df, P > 0.05; Fig. 4). This indicates that neither the live model nor the video model observer improved the learning efficiency compared to control fish which experienced no observation.

The proportion (%) of fish to have learned the feeding base in the course of nine test trials in Experiment 1: control (black square), live model observer (gray diamond), and video model observer (white circle)
Experiment 2: Avoidance training
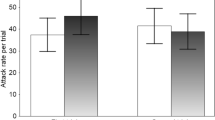
The escape latency of the control fish was significantly longer than that of the fish trained by live model observer (Tukey’s test by GLHT for GLMM: Z = −13.73, P < 0.001; Fig. 5 ; Table 1) and video model observer (Z = −14.87, P < 0.001). There was no significant difference in escape latency between the fish trained by live model and video model (Z = −1.16, P > 0.05).

Average escape latency (s) in the course of 20 conditioning trials in Experiment 2: control (black square), live model observer (gray diamond), and video model observer (white circle). Bars indicate standard deviation (n = 6)
Discussion
In Experiment 1, 45-mm SL P. major juveniles did not improve their feed learning ability through the observation of conspecific individuals feeding, either in an adjacent tank or displayed on a video monitor. Therefore, it was not possible to evaluate the efficiency of video model for observational learning. However, in Experiment 2, the escape latency of 114-mm SL juveniles decreased through the observation of live model and video model, compared to non-observing control fish. This result shows that P. major juveniles can acquire avoidance and sheltering information by observing conspecific fish in video playback. The video model has been reported to work as effectively as a live model for other fish species and innate behavioral aspects [11–17]. For example, a male swordtail Xiphophorus helleri shows courting behavior to a female displayed in video playback [16], and conspecific model in video playback would induce aggression behavior in Betta splendens [17]. In addition to these studies, the present study indicates that watching a video model can work for observational learning of avoidance information.
Past studies revealed that by observing a predation event on a live conspecific a fish can acquire information about predator threat without risking themselves [18–20]. Watching a predation event on a video model, observer fish may be able to learn anti-predator behavior. Indeed, Johnson & Basolo [21] found that X. helleri recognized a predation event on a conspecific in video playback, and their mating responses were altered after watching the video. Observational learning for a predation event in a video playback should be studied to develop a practical training technique. Furthermore, the duration of such memory also has a high priority for further study to improve the efficiency of training in hatchery-reared fish.
The size of fish may have induced the different results of observational learning between Experiments 1 and 2. Our previous studies showed that learning capability in fish changes ontogenetically and between conditioned stimuli [22, 23]. We also found that the ontogenetic change of observational learning in T. japonicus coincides with that of social interaction [24]. Further studies using juveniles in several developmental stages are required to evaluate observational learning through video model on fish feeding behavior.
For establishing observational learning in fish, the appearance of model would be important [25, 26]. Using animation techniques, it is possible to manipulate the model appearance, e.g., size, color, and motion in video model. Fishes are reported to react to animated fish in video model just as to live models [27, 28]. Such image manipulation may play an important role in furthering investigations on the mechanisms of observational learning, and thus for the application of this technique in the practice of stock enhancement.
References
Masuda R, Tsukamoto K (1998) Stock enhancement in Japan: review and prospective. Bull Mar Sci 62:337–358
Steingrund P, Ferno A (1997) Feeding behaviour of reared and wild cod and the effect of learning: two strategies of feeding on the two-spotted goby. J Fish Biol 51:334–348
Stunz GW, Minello TJ (2001) Habitat-related predation on juvenile wild-caught and hatchery-reared red drum Sciaenops ocellatus (Linaeus). J Exp Mar Biol Ecol 260:13–25
Olla B, Davis MW (1989) The role of learning and stress in predator avoidance of hatchery-reared coho salmon (Oncorhynchus kisutch) juveniles. Aquaculture 76:209–214
Brown C, Day RL (2002) The future of stock enhancements: lessons for hatchery practice from conservation biology. Fish Fish 3:79–94
Wisenden BD, Klitzke J, Nelson R, Friedl D, Jacobson PC (2004) Predator-recognition of hatchery-reared walleye (Stizostedion vitreum) and a field test of a training method using yellow perch (Perca flavescens). Can J Zool Aqua Sci 61:2144–2150
Coolen I, Yv Bergen, Day RL, Laland KN (2003) Species difference in adaptive use of public information in sticklebacks. P Roy Soc Lond B Biol 270:2413–2419
Takahashi K, Masuda R, Yamashita Y (2012) School for learning: sharing and transmission of feeding information in jack mackerel Trachurus japonicus juveniles. Fish Sci 78:269–276
Suboski MD, Templeton JJ (1989) Life skills training for hatchery fish: social learning and survival. Fish Res 7:343–352
Brown C, Laland K (2001) Social learning and life skills training for hatchery reared fish. J Fish Biol 59:471–493
Kodric-Brown A, Nicoletto PF (1997) Repeatability of female choice in the guppy: response to live and videotaped males. Anim Behav 54:369–376
Clark DL, Stephenson KR (1999) Response to video and computer-animated images by the tiger barb, Puntius tetrazona. Environ Biol Fish 56:317–324
Robinson-Wolrath SI (2006) Video playback versus live stimuli for assessing mate choice in a pipefish. Environ Biol Fish 75:409–414
Trainor BC, Basolo AL (2006) Location, location, location: stripe position effects on female sword preference. Anim Behav 71:135–140
Gonçalves DM, Oliveira RF, Korner K, Poschadel JR, Schlupp I (2000) Using video playbacks to study visual communication in a marine fish, Salaria pavo. Anim Behav 60:351–357
Trainor BC, Basolo AL (2000) An evaluation of video playback using Xiphophorus helleri. Anim Behav 59:83–89
Verbeek P, Iwamoto T, Murakami N (2007) Differences in aggression between wild-type and domesticated fighting fish are context dependent. Anim Behav 73:75–83
Arai T, Tominaga O, Seikai T, Masuda R (2007) Observational learning improves predator avoidance in hatchery-reared Japanese flounder Paralichthys olivaceus juveniles. J Sea Res 58:59–64
Webster MM, Laland KN (2008) Social learning strategies and predation risk: minnows copy only when using private information would be costly. P Roy Soc Lond B Biol 275:2869–2876
Brown C, Laland KN (2011) Social learning in fishes. Fish cognition and behavior (Edited by Brown C, Laland K and Krause J). Blackwell Publishing Ltd, UK 2011:240–257
Johnson JB, Basolo AL (2003) Predator exposure alters female mate choice in the green swordtail. Behav Ecol 14:619–625
Takahashi K, Masuda R, Yamashita Y (2010) Ontogenetic changes in the spatial learning capability of jack mackerel Trachurus japonicus. J Fish Biol 77:2315–2325
Takahashi K, Masuda R, Matsuyama M, Yamashita Y (2012) Stimulus-specific development of learning ability during habitat shift in pre to post-recruitment stage jack mackerel. J Ethol 30:309–316
Takahashi K, Masuda R, Yamashita Y (2014) Development of observational learning during school formation in jack mackerel Trachurus japonicus juveniles. Behav Process 103:52–57
Duffy GA, Pike TW, Laland KN (2009) Size-dependent directed social learning in nine-spined sticklebacks. Anim Behav 78:371–375
Takahashi K, Masuda R, Yamashita Y (2014) What to copy: the key factor of observational learning in striped jack (Pseudocaranx dentex) juveniles. Anim Cog 17:495–501
Shashar N, Rosenthal GG, Caras T, Manor S, Katzir G (2005) Species recognition in the blackbordered damselfish Dascyllus marginatus (Rüppell): an evaluation of computer-animated playback techniques. J Exp Biol Ecol 318:111–118
Baldauf SA, Kullmann H, Thunken T, Winter S (2009) Computer animation as a tool to study preferences in the cichlid Pelvicachrmis taeninatus. J Fish Biol 75:738–746
Acknowledgements
We would like to thank the staff of Miyazu National Center for Stock Enhancement for providing P. major juveniles used in Experiment 2. This research was funded by the Sasakawa Scientific Research Grant from the Japan Science Society.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Takahashi, K., Masuda, R. & Yamashita, Y. Can red sea bream Pagrus major learn about feeding and avoidance through the observation of conspecific behavior in video playback?. Fish Sci 81, 679–685 (2015). https://doi.org/10.1007/s12562-015-0881-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12562-015-0881-8