
Abstract
Data-driven decisions can be performed based on crop yield values, essential information for precision agriculture practices. Technical solutions for yield mapping have been increasing for the sugarcane crop. However, the adoption of a yield monitor is low among farmers. An alternative is associating the amount of sugarcane harvested with the yield. The objective of this study was to evaluate the accuracy of the sugarcane mass prediction by a hydraulic oil pressure sensor installed in the chopper of the harvester. A commercial sugarcane field was used for the field trial with four harvesters and an in-field wagon instrumented with the load cells. All equipment at the harvesting front were equipped with ZigBee technology for data transfer to the sugar mill's Remote control center. The redistribution of the total weight of sugarcane harvested within each field was based on the chopper hydraulic pressure variation. The yield monitor had a low prediction error (4.5%) compared to the total measured by the in-field wagon. The results suggest enhancing the frequency of data collection by the harvester improves the spatial variability detection of sugarcane yield at the field level. The distribution of the total mass of sugarcane harvested indicated that neither empirical model nor sensors calibration is required to estimate yield regardless of the harvester. In future, the application of telemetry and distribution of the total harvest within the field should be studied for other crops, e.g., grains, which already use this technology for the management of equipment in the field.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Over the years, studies developed and tested yield monitor solutions for mapping sugarcane yield within fields. Yield monitors using load cells (Magalhães and Cerri 2007), optical fiber (Price et al. 2017), deflection plate (Quaderer et al. 2014), multi-sensors fusion (Lima et al. 2021), and 3D sensors (Darr et al. 2019) have already been tested on sugarcane harvesters to measure the amount of sugarcane processed in real-time. However, according to Momin et al. (2019), the lack of accuracy of the yield monitor commercially available makes the low adoption of this tool by growers. In addition, the developed systems still require frequent calibration of the sensors, which can reduce the operational efficiency of the machines.
Yield is the most important layer for managing the spatial and temporal variability of the crops, and it is an essential component to implement PA practices (Momin et al. 2019; Sanches et al. 2019). The main objective is of yield mapping is to identify patterns and locations with high and low yield potential. In this way, management can be carried out to increase yields in areas with high productive potential and maximize profitability in areas where it is not possible to increase the yield. Furthermore, the use of PA tools to manage the spatial and temporal variability of the sugarcane field, besides reducing costs and increasing yields, minimizes the negative environmental impacts and improves the sugarcane quality (Silva et al. 2011).
The sugarcane industry has always been receptive to solutions for the management of fields with focus on improving the operational efficiency of the machinery and equipment that carry out the operations. Among these solutions, the most widely used is Global Navigation Satellite Systems (GNSS) for the auto-guidance of equipment within the field (Baio 2012; Passalaqua and Molin 2020), high-resolution satellite imagery (Canata et al. 2021; Shendryk et al. 2021), and the high-spatial resolution data generated by proximal soil and plant sensing (Amaral et al. 2018; Sanches et al. 2019). Recently, there is a rapid and growing adoption of telemetry and machine location systems in this sector due to the advent of General Packet Radio Service (GPRS) communication systems and the affordable cost of data transmission systems (Amiama et al. 2008). In terms of data acquisition for use in crop management, telemetry is one of the most promising technologies for leveraging access to a greater amount of data from the crop and the equipment. The adoption of telemetry by sugarcane growers allows the information to be transmitted from the sugarcane field to the grower's office through Wireless Sensors Networks (WSN) and the internet connections.
On the harvesting front, multiple harvesters and tractors pulling in-field wagons (Momin et al. 2019) are connected to a WSN. WSN is based on the increasing convergence of computing and communication, where all communication devices contain computing functionality and all computing devices communicate with each other (Pierce and Elliott 2008). Thus, sugarcane harvesters and tractors are equipped with GNSS and onboard computers to monitor and organize their distribution within the harvesting front. The location information shared between equipment and sensors data from each equipment is sent to the control center for machinery management. Equipment such as the sugarcane harvester already carries a high instrumentation level. The data generated by these sensors in real-time helps monitor the parameters related to its harvest operation (Corrêdo et al. 2020; Lima et al. 2021).
One assumption is that sensors installed on the harvester and connected to a WSN can provide essential information about the amount of sugarcane harvested and chopped in real-time. In PA, WSNs are generally used to monitor parameters, or are used integrated into control systems (Popescu et al. 2020) as sensors installed in agricultural equipment. Embedded sensors in the sugarcane harvester can collect data at a high-resolution representing an opportunity to guide spatial variably management within each sugarcane row (Corrêdo et al. 2020). In this way, harvester sensor data can be transferred using appropriate data transmission technology within the field and connected to the GPRS network to the sugar mill. In WSN-based agricultural applications, the ZigBee wireless protocol is one of the most used due to its low cost, being energy-efficient, and have a low-duty cycle (Ojha et al. 2015; Jawad et al. 2017; Ünal 2020). It is used in agricultural systems that require a periodic refresh rate, for example, water quality management, irrigation management (Srbinovska et al. 2015; Aiello et al. 2018), pesticide, and fertilizer controls.
Ünal (2020) used a ZigBee wireless network to connect equipment within the fields and the control center, which allowed real-time monitoring of CAN (Controller Area Network) and GNSS data in the equipment. Maldaner et al. (2021) predicted sugarcane yield in real-time using engine parameters available in CAN on the onboard computer of the sugarcane harvester and machine learning approaches. Other studies, as carried out by Cox et al. (1999), suggest that data generated by hydraulic oil pressure sensors from the cane harvester chopping system, for example, and made available in the harvester's CAN, has the potential to be used to estimate sugarcane yield, since this data may correlate with the amount of processing mass. In this study, a WSN commercially used by sugar mills in Brazil was used. The differential of our study is the redistribution of the total mass producing within each sugarcane field based on hydraulic oil pressure. In this way, there is no need to purchase and install income monitors in the reaper by the farmer. Thereby, the objective of this work was to evaluate whether the sensors installed in the harvester can accurately estimate sugarcane yield within the fields.
Material and Methods
Yield Estimation
The approach to estimate sugarcane yield in this study was based on the total weight of sugarcane harvested in studied areas spatially distributed in the field, considering the variations of hydraulic pressure of the chopper system of each harvester. In this study, we used the commercial WSN system already used by sugar mills in Brazil. The WSN system used in this study has already been studied and described by (Yu et al. 2013; Zenglin et al. 2017; Ünal 2020) in other agricultural applications. All equipment (harvesters, in-field wagons, and trucks) were connected to the ZigBee and a GPRS network, where the identification and location information for each equipment was sent in real-time to the management center (Fig. 1). The system for connecting and sending data from the devices to the monitoring center consists of four steps following the system developed by Zenglin et al. (2017).

The topology of the sugarcane mapping system
The ZigBee Wireless Network
The network topology structure is the foundation of the network (Yu et al. 2013). The system design in the sugarcane fields has a traditional WSN adopted in each equipment within the harvest front. All nodes in the WSN will transmit data to the base station. The location of a WSN node depends on the coordinates generated by GNSS installed in each equipment. The WSN nodes can be located in the same field or in different fields within the same harvester front. The ZigBee terminal node consists of onboard computers and a ZigBee wireless module (Zenglin et al. 2017) installed in all equipment (harvesters, wagons, and trucks) distributed within the field where harvesting was carried out. The nodes are supplied with electrical power through each equipment battery (24 V DC) which is constantly monitored. Each onboard computer sends to the ZigBee network information of the identification and location of each equipment generated by a GNSS. All onboard computers transmit and receive data with a priority and the IEEE 802.15.4 protocol by a DigiMesh network (Digikey, Minnesota, EUA). Thus, there is data exchange among the nodes; therefore, they directly share this information among the equipment. The onboard computers installed in the harvesters send the identification and location of the equipment in the field and also send the data generated from any sensors. If a node malfunctions, the computer automatically stops sending data to the network, while the other nodes continue to send information over the network normally.
Base Station
Consists of an antenna and a system capable of meeting the communication needs of the regions where the equipment was located during the harvest. A BCM2835 processor embedded with arm11 technology and a ZigBee module (Digikey, Minnesota, EUA) was used for data conversion between ZigBee and GPRS network. In many agricultural applications, the base station has an alternate energy source such as solar power (Ojha et al. 2015). In remote locations, a solar power supply and a high capacity battery are often used with the base station.
The GPRS Network
A mobile communication system and the GSM Bridge for the 3G and 4G networks were used to transmit the data between the base station terminal and the remote control centers. GPRS modems do not require a constant Internet connection with a standard modem because they only use the network when data are sent. It uses packet-switching technology and sends the data at high speed on the network and instant connections, subject to radio coverage.
The Remote Control Center (RCC)
An RS232 chip connects the GPRS module to the computer (Zenglin et al. 2017), which processes and stores the data collected from each equipment connected to the wireless network in the harvest front. In this work, the monitoring center stored the location and identification data of each equipment within the harvest area to perform the tracking of the sugarcane harvested. Also, the total weight of sugarcane harvested by each harvester was monitored. In this way, by locating the harvester's path during cutting and processing the sugarcane within the field was possible to redistribute the total weight to each harvester.
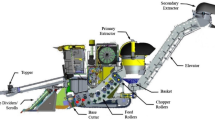
The redistributing of the total weight of sugarcane harvested within each field was based on the variation of the hydraulic oil pressure in the chopper system. The chopper system consists of two hydraulic motors that drive a pair of chopping drums with flat blades along their length (Fig. 2A). These blades chop the sugarcane stalks into billets of approximately 0.2–0.3 m. The chopper power technique assumes that the power required to chop the sugarcane into billets is proportional to the mass flow rate through the choppers (Cox et al. 1999; Xie et al. 2019). The hydraulic pressure demanded to chop the sugarcane was measured with pressure transducers in the hydraulic circuit, both before and after the chopper motors (Fig. 2B). The pressure sensor, model SCP01–400–14 (Parker Hannifin, Ohio, USA), was used to measure the hydraulic pressure in the chopper motor. This sensor has a reading range from 0–400 bar with a response time of ≤ 1.0 ms. Its nonlinearity and hysteresis error was specified as ± 0.1% at full scale, environmental temperature range of -40– + 85 °C, and a fluid temperature range from -40– + 125 °C. The sensor needs a maximum supply of 30 V and 50 mA.

Schematic diagram of the sugarcane chopper system (A) and the hydraulic oil pressure sensors (B)
The hydraulic pressure data were processed in real-time by the onboard computer in the harvester. The differential hydraulic pressure (DP) was calculated at each time i. This DP at the time i was compared to the previously DP calculated at time i–1. If the DPi has a greater or lower variation than the DPi−1, and then the onboard computer sends the DPi information to the RCC. The coordinates were also sent to the RCC identifying the moment that the DP occurred, the identification of the harvester, the identification of the in-field wagon where the harvester was unloading the processed sugarcane in real-time, and the identification of the truck where this wagon transferred the harvested sugarcane. This truck receives multi-wagon loading. In the end, the total weight of sugarcane in the truck is sent to the RCC, where it is distributed according to the wagon identifications to their respective recollections.
Field Trial
The trial was conducted in a 186 ha commercial sugarcane field in the municipality of Quatá, São Paulo, Brazil (22°11′26"S, 55°51′18"W, and 545 m of altitude). The first ratoon field was planted to sugarcane variety RB98769 and was cultivated with double-combined row spacing (1.50 m × 0.90 m). Similar to that described by Momin et al. (2019), in this study, the sugarcane harvesting operation consisted of four sugarcane harvesters, a fleet of tractor pulling in-field wagons, and a fleet of semi-trucks.
Data Collection
The in-field wagon, which was equipped with the load cells, was loaded by the harvester and then driven to a transloading site. The in-field wagon had a load capacity of 8 Mg instrumented with load cells, EX5000 model (Exact scales, Rancharia, São Paulo, Brazil) with 10 kg resolution for real-time measurement of the sugarcane harvested. For each harvester, four loads of these in-field wagons were collected, which continuously recorded the sugarcane mass at a frequency of 1 Hz while the harvester cut, processed, and threw the sugarcane billets in the wagon. In this way, 16 wagons were collected during the field trial. The amount of data recorded by the yield monitor was less than the data generated by the load cells installed on the railcar in field wagon. While the registration time of data by the load cells at transfer was 1 s, the monitor recorded data at an average frequency of 17 s.
Data Processing
First, the time lag difference in the data logger on the harvester was corrected. The time in which the mass of sugarcane passes through the chopper system until it is measured by the load cells installed in the in-field wagon was 7 s (offset). The sugarcane yield (kg ha−1) data estimated by the harvester with the respective time and coordinates were synchronized with the load cell data (kg) by the registration time. After the synchronization, the sugarcane yield values (kg ha−1) estimated at the harvester were converted into the total amount of mass (kg) processed at each synchronized point. The estimated total amount of sugarcane mass was compared to the observed total mass.
To perform the comparison of point-to-point yield data, the estimated and observed mass at each point synchronized was converted into the mass flow (kg s−1) according to Eq. (1):
where m is the mass at point i, and t is the time in point i.
Prediction Performance
The performance metric used was the Root-mean-square error (RMSE, Eq. (2)) and Mean absolute percentage error (MAPE, Eq. (3)).
where, \(\hat{m}_{i}\) is the predicted mass, and mi is the measured mass at time collection i, and n is the number of observations. The mean error, the standard deviation (SD) of the error, the 95th percentile of absolute error, and the percentage of RMSE in relation to the range measured truth mass were also used as supplementary error descriptive metrics (Fei et al. 2020).
Results and Discussion
Data Resolution
The frequency of data recording influenced the yield variability. The higher the frequency of data collection, the greater the yield variability found within the sugarcane row. Estimating yield with a higher frequency of the sensors in the harvester that travels across the field every (or double) sugarcane row can provide a high-resolution yield map. PA applications, i.e., mapping nutrients exported in detailed resolution, in the sugarcane field require a yield map with high-resolution spatial. The system proposed in this paper can predict the mass flow changes over the time of the harvest, especially when an abrupt change in mass flow occurred (black box in Fig. 3). Similar results to those found by Maldaner et al. (2021), where yield prediction model using harvester CAN data can recognize changes in sugarcane yield, but, when there is an abrupt change in yield values, there was a greater prediction error. In this study, there was a greater variation in the observed mass flow; however, the yield monitor did not record these small variations in mass flow. This led to the smoothing of the mass flow over the collection time (blue box in Fig. 3). There were low mass variations (dotted black polygon in Fig. 3), and the approach failed to identify these variations, overestimating the mass flow. Although for most site-specific applications, there is a need for high-resolution yield data, according to (Blackmore and Moore 1999), some applications in precision farming, such as the definition of management zones, accept some smoothing in the yield data.

Sugarcane mass flow (kg s−1) estimated by the yield monitor and observed by the load cells installed in the instrumented in-field wagon over the collection time. Black box—Mass flow where the approach was able to identify the variations. Blue box—the approach smoothed the mass flow over the collection time. Black polygon dotted—The approach overestimated the mass flow
Total Mass Estimation
The predicted and observed total mass has a strong correlation (r = 0.99). Figure 4 shows that the observed versus the predicted total weight relationship has a regression slope of 1.09 and an R2 of 0.98. The approach of this study had an RMSE of 296 kg and a MAPE of 4.5%. The RMSE represents 3.7% of the maximum load (8,000 kg) of the in-field wagon used in this study. The MAPE in this study was similar to the studies carried out by Molin and Menegatti (2004) and Magalhães and Cerri (2007) that used a yield monitor with load cells in the elevator of the harvester and obtained a MAPE of 9.5% and 4.3%, respectively.

The total mass observed in each in-field wagon versus the total mass estimated by the yield monitor. The dashed line represents the 1:1 line, and the solid line represents the fitted linear function
Local Mass Estimation
All four harvesters performed similarly in predicting the flow of sugarcane mass over the harvest time. They had an excellent linear model fit with R2 between 0.93–0.98 and a regression slope closest to 1 (Fig. 5). This indicates that there was no difference between the sensors installed on the different harvesters and that different calibrations were not required. Multiple harvesters working in the same field and with yield monitors with different calibration settings cause discontinuity of the data values and require post-processing to remove this calibration difference (Maldaner et al. 2016; Sams et al. 2017; Leroux et al. 2018).

Mass flow observed versus mass flow estimated by the yield monitor in each sugarcane harvester
The RMSE varies from 3.1–3.4 kg s−1 (Fig. 5), which corresponds to 3.1–6.3% of the mass flow range for each harvester. However, MAPE ranging from 12.0–17.6%. There was a high dispersion of the data observed and estimated by the yield monitor, mainly due to the operational frequency difference between devices. The lower frequency of recorded data resulted in a smoothing in the mass flow values, causing high error dispersion.
Considering all four harvesters, the RMSE was 3.3 kg s−1, representing 3.3% of the maximum mass flow and a MAPE of 14.4% (Fig. 6). The mean absolute error was 2.2 kg s−1, and the SD was 2.4 kg s−1. The error dispersion in Fig. 6 shows a variation of the error between -10–10 kg s−1. From the observed mass flow above 60 kg s−1, the yield monitor underestimated the sugarcane flow mass, smoothing the values of the collected data. Smoothing the data lost details of the yield variability within rows, and according to (Maldaner and Molin 2020), the investigation for local interventions within sugarcane row demand high-frequency data acquisition by the yield monitor.

Sugarcane mass flow observed versus mass flow estimated, and scatter plot of prediction error versus mass flow observed
On the other hand, the data generated by the yield monitor in this system of distribution of the total mass do not require post-processing steps to remove the outlier data, as the data does not contain outliers. Some studies with yield data filtering show that values are smoothed after removing the outliers in the data set (Bramley and Jensen 2014; Maldaner and Molin 2020). Enhancing the frequency of data collection by the harvester can better characterize the spatial variability of the fields. For future studies, field trials can cover different varieties of sugarcane and field conditions (slope, soil type, among others).
Conclusion
The system generates accurate yield data (error of 4.5%) with high sample density within sugarcane rows, which is essential information for the site-specific management of sugarcane fields. In distributing the total mass harvested using multiple harvesters within the same field, it was unnecessary to calibrate the sensors for different harvesters. The registration time of the yield monitor in this study was 17 s, making it challenging to identify the small variations in the mass flow within the sugarcane row, indicating the possibility of increasing the frequency of data collection recorded by the harvester. The sugarcane yield mapping approach has the potential to replace conventional yield monitor. Many sugarcane industries already use telemetry to collect data for machine and equipment management, and this study showed that data transmitted via telemetry, such as those from the hydraulic pressure sensors of the chopper system, can generate the information necessary for the spatialization of sugarcane yields. Overall, the approaches in this study help support different applications in PA. Furthermore, this approach can be the basis for studies with different sugarcane varieties in different production environments. In addition, the application of telemetry and distribution of the total harvested within the field should be studied for other crops, e.g., grains, which already use this technology for the management of equipment in the field.
References
Momin, Md.A., T.E. Grift, D.S. Valente, and A.C. Hansen. 2019. Sugarcane yield mapping based on vehicle tracking. Precision Agriculture 20: 896–910. https://doi.org/10.1007/s11119-018-9621-2.
Aiello, G., I. Giovino, M. Vallone, P. Catania, and A. Argento. 2018. A decision support system based on multisensor data fusion for sustainable greenhouse management. Journal of Cleaner Production 172: 4057–4065. https://doi.org/10.1016/j.jclepro.2017.02.197.
Amaral, L.R., R.G. Trevisan, and J.P. Molin. 2018. Canopy sensor placement for variable-rate nitrogen application in sugarcane fields. Precision Agriculture 19: 147–160. https://doi.org/10.1007/s11119-017-9505-x.
Amiama, C., J. Bueno, C.J. Álvarez, and J.M. Pereira. 2008. Design and field test of an automatic data acquisition system in a self-propelled forage harvester. Computers and Electronics in Agriculture 61: 192–200. https://doi.org/10.1016/j.compag.2007.11.006.
Baio, F.H. 2012. Evaluation of an auto-guidance system operating on a sugar cane harvester. Precision Agriculture 13: 141–147. https://doi.org/10.1007/s11119-011-9241-6.
Blackmore, S., and M. Moore. 1999. Remedial correction of yield map data. Precision Agriculture 1: 53–66. https://doi.org/10.1023/A:1009969601387.
Bramley, R.G.V., and T.A. Jensen. 2014. Sugarcane yield monitoring: A protocol for yield map interpolation and key considerations in the collection of yield data. International Sugar Journal 116: 370–379.
Canata, T.F., M.C.F. Wei, L.F. Maldaner, and J.P. Molin. 2021. Sugarcane yield mapping using high-resolution imagery data and machine learning technique. Remote Sensing 13: 232. https://doi.org/10.3390/rs13020232.
Corrêdo, L. de P., T.F. Canata, L.F. Maldaner, J.J.A. Lima, and J.P. Molin. 2020. Sugarcane harvester for in-field data collection: State of the art, its applicability and future perspectives. Sugar Tech 23: 1–14. https://doi.org/10.1007/s12355-020-00874-3.
Cox, G., H. Harris, and D. Cox. 1999. Application of Precision Agriculture to Sugar Cane. In Proceedings of the Fourth International Conference on Precision Agriculture, 753–765. Madison: American Society of Agronomy, Crop Science Society of America, Soil Science Society of America. https://doi.org/10.2134/1999.precisionagproc4.c72.
Darr, M.J., D.J. Corbett, H. Herman, C. Vallespi-Gonzalez, B.E. Dugas, and H. Badino. 2019. Yield measurement and base cutter height control systems for a harvester. US 10371561 B2.
Fei, Z., J. Shepard, and S.G. Vougioukas. 2020. Estimation of Worker Fruit-Picking Rates with an Instrumented Picking Bag. Transactions of the ASABE 63: 1913–1924. https://doi.org/10.13031/trans.13981.
Jawad, H.M., R. Nordin, S.K. Gharghan, A.M. Jawad, and M. Ismail. 2017. Energy-efficient wireless sensor networks for precision agriculture: A review. Sensors 17: 1–45. https://doi.org/10.3390/s17081781.
Leroux, C., H. Jones, A. Clenet, B. Dreux, M. Becu, and B. Tisseyre. 2018. A general method to filter out defective spatial observations from yield mapping datasets. Precision Agriculture 19: 789–808. https://doi.org/10.1007/s11119-017-9555-0.
Lima, J.J.A. de, L.F. Maldaner, and J.P. Molin. 2021. Sensor fusion with narx neural network to predict the mass flow in a sugarcane harvester. Sensors 21(13): 4530. https://doi.org/10.3390/s21134530.
Magalhães, P.S.G., and D.G.P. Cerri. 2007. Yield monitoring of sugar cane. Biosystems Engineering 96: 1–6. https://doi.org/10.1016/j.biosystemseng.2006.10.002.
Maldaner, L.F., and J.P. Molin. 2020. Data processing within rows for sugarcane yield mapping. Scientia Agricola 77: e20180391. https://doi.org/10.1590/1678-992x-2018-0391.
Maldaner, L.F., J.P. Molin, and T.F. Canata. 2016. Processing yield data from two or more combines. In 13th International Conference on Precision Agriculture, 1–9. St. Louis, Missouri: International Society of Precision Agriculture.
Maldaner, L.F., L. de P. Corrêdo, T.F. Canata, J.P. Molin. 2021. Predicting the sugarcane yield in real-time by harvester engine parameters and machine learning approaches. Computers and Electronics in Agriculture 181: 105945. https://doi.org/10.1016/j.compag.2020.105945.
Molin, J.P., and L.A.A. Menegatti. 2004. Field-testing of a sugar cane yield monitor in Brazil. In ASAE/CSAE Annual International Meeting, 733–744. St. Joseph, MI. https://doi.org/10.13031/2013.16159.
Ojha, T., S. Misra, and N.S. Raghuwanshi. 2015. Wireless sensor networks for agriculture: The state-of-the-art in practice and future challenges. Computers and Electronics in Agriculture. https://doi.org/10.1016/j.compag.2015.08.011.
Passalaqua, B.P., and J.P. Molin. 2020. Path errors in sugarcane transshipment trailers. Engenharia Agricola 40: 223–231. https://doi.org/10.1590/1809-4430-ENG.AGRIC.V40N2P223-231/2020.
Pierce, F.J., and T.V. Elliott. 2008. Regional and on-farm wireless sensor networks for agricultural systems in Eastern Washington. Computers and Electronics in Agriculture 61: 32–43. https://doi.org/10.1016/j.compag.2007.05.007.
Popescu, D., F. Stoican, G. Stamatescu, L. Ichim, and C. Dragana. 2020. Advanced UAV–WSN system for intelligent monitoring in precision agriculture. Sensors 20: 18–21. https://doi.org/10.3390/s20030817.
Price, R.R., R.M. Johnson, and R.P. Viator. 2017. An overhead optical yield monitor for a sugarcane harvester based on two optical distance sensors mounted above the loading elevator. Applied Engineering in Agriculture 33: 687–693. https://doi.org/10.13031/aea.12191.
Quaderer, J.G., and M.F. Cash. 2014. Sugar cane yield mapping. U.S. Patent No. 8,955,402
Sams, B., C. Litchfield, L. Sanchez, and N. Dokoozlian. 2017. Two methods for processing yield maps from multiple sensors in large vineyards in California. Advances in Animal Biosciences 8: 530–533. https://doi.org/10.1017/s2040470017000516.
Sanches, G.M., P.S.G. Magalhães, and H.C.J. Franco. 2019. Site-specific assessment of spatial and temporal variability of sugarcane yield related to soil attributes. Geoderma 334: 90–98. https://doi.org/10.1016/j.geoderma.2018.07.051.
Shendryk, Y., R. Davy, and P. Thorburn. 2021. Integrating satellite imagery and environmental data to predict field-level cane and sugar yields in Australia using machine learning. Field Crops Research 260: 107984. https://doi.org/10.1016/j.fcr.2020.107984.
Silva, C.B., M.A.F.D. de Moraes, and J.P. Molin. 2011. Adoption and use of precision agriculture technologies in the sugarcane industry of São Paulo state, Brazil. Precision Agriculture 12: 67–81. https://doi.org/10.1007/s11119-009-9155-8.
Srbinovska, M., C. Gavrovski, V. Dimcev, A. Krkoleva, and V. Borozan. 2015. Environmental parameters monitoring in precision agriculture using wireless sensor networks. Journal of Cleaner Production 88: 297–307. https://doi.org/10.1016/j.jclepro.2014.04.036.
Ünal, İ. 2020. Integration of ZigBee based GPS receiver to CAN network for precision farming applications. Peer-to-Peer Networking and Applications 13: 1394–1405. https://doi.org/10.1007/s12083-020-00897-3.
Xie, L., J. Wang, S. Cheng, B. Zeng, and Z. Yang. 2019. Performance Evaluation of a Chopper System for Sugarcane Harvester. Sugar Tech 21: 825–837. https://doi.org/10.1007/s12355-019-00714-z.
Yu, X., W. Pute, W. Han, and Z. Zhang. 2013. A survey on wireless sensor network infrastructure for agriculture. Computer Standards and Interfaces 35: 59–64. https://doi.org/10.1016/j.csi.2012.05.001.
Zenglin, Z., W. Pute, H. Wenting, and Y. Xiaoqing. 2017. Remote monitoring system for agricultural information based on wireless sensor network. Journal of the Chinese Institute of Engineers 40: 75–81. https://doi.org/10.1080/02533839.2016.1273140.
Acknowledgements
Authors thank the National Council for Scientific and Technological Development (CNPq), a Brazilian Federal Agency, (grant number 168643/2017-0), and to Coordination for the Improvement of Higher Education Personnel (CAPES) (under Finance Code 001). Authors thank Solinftec Incorporated, Araçatuba SP, Brazil, for the partnership in this research. Especially to Thiago Cinelli Quaranta and Guilherme Guiné Pinto Ferreira for all the support offered during the development period of this research. Authors thank Zilor Sugarcane Mill, Quatá, São Paulo, Brazil, for all support in this research.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Maldaner, L.F., Canata, T.F. & Molin, J.P. An Approach to Sugarcane Yield Estimation Using Sensors in the Harvester and ZigBee Technology. Sugar Tech 24, 813–821 (2022). https://doi.org/10.1007/s12355-021-01050-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12355-021-01050-x