
Abstract
The nonlinear Rayleigh–Taylor stability of the cylindrical interface between the vapour and liquid phases of a fluid is studied. The phases enclosed between two cylindrical surfaces coaxial with mass and heat transfer is derived from nonlinear Ginzburg–Landau equation. The F-expansion method is used to get exact solutions for a nonlinear Ginzburg–Landau equation. The region of solutions is displayed graphically.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The problem of stability of liquids when there is mass and heat transfer across the interface has been investigated by several researchers. The heat and mass transfer phenomenon in multiphase flows has applications in many situations such as boiling heat transfer in chemical engineering and in geophysical problems [1–3]. Hsieh observed that the heat and mass transfer phenomenon enhances the stability of the system if the vapour layer is hotter than the liquid layer. Linear stability analysis of the physical system consisting of a vapour layer underlying a liquid layer of an inviscid fluid was carried out by Hsieh [4]. Hsieh [3] established a general formulation of interfacial flow problem with mass and heat transfer and applied it to the Rayleigh–Taylor and Kelvin–Helmholtz instability problems in plane geometry. The linear stability analysis of a liquid–vapour interface (liquid as viscous and motionless and vapour as inviscid) moving with a horizontal velocity is studied in [5]. Nonlinear Kelvin– Helmholtz instability analysis of liquid vapour interface of an inviscid fluid was performed by Lee [6]. He concluded that when the fluids are inviscid, the linear stability was not affected by heat transfer coefficient.
The heat and mass transfer effects on the Rayleigh–Taylor instability of two viscous fluids and how the mass transfer effect stabilizes the interface are investigated in [7]. Asthana and Agrawal [8] investigated the effect of heat transfer on the Kelvin–Helmholtz instability of miscible fluids using viscous potential flow theory. They observed that the heat and mass transfer has a strong stabilizing effect, when the lower fluid is highly viscous and a weak destabilizing effect, when the viscosity of the fluid is low. Kim et al [9] studied the capillary instability including the effect of interfacial heat and mass transfer and noted that the interfacial heat and mass transfer phenomenon resists the growth of disturbance waves [10–13]. The nonlinear Rayleigh–Taylor instability of the interface between two viscous, incompressible and thermally conducting fluids in a fully saturated porous medium, when the phases are enclosed between two horizontal cylindrical surfaces coaxial with the interface is discussed in [14]. The perturbation analysis, in the light of the multiple expansions in both space and time, leads to the well-known Ginzburg–Landau equation. The various stability conditions are discussed both analytically and numerically in [15].
The effect of an electric field on the linear Kelvin–Helmholtz instability was studied by Asthana and Agrawal [16]. The considered fluids were dielectric, and the electric field was applied in the streaming direction. They concluded that the tangential electric field stabilizes the interface in the presence of heat and mass transfer, while the ratio of dielectric constant plays a dual role in the stability analysis. The study of the interaction between magnetic fields and electrically conducting fluids is known as magnetohydrodynamics. The effect of magnetic field on the stability of various types of fluid flows is an important domain of study. The effect of a horizontal magnetic field on the stability of a steady flow was studied by Chandrasekhar [17]. Roberts [18] considered the effect of an unsteady magnetic field on the Rayleigh–Taylor instability. Malik and Singh [19] carried out nonlinear analysis of the Kelvin–Helmholtz instability in the presence of a uniform magnetic field, acting along the surface of separation of two moving superposed fluids [20]. Zakaria [21] studied the nonlinear dynamics of magnetic fluids with a relative motion in the presence of an oblique magnetic field.
This paper is organized as follows: In §2, the formulation of the nonlinear Rayleigh–Taylor stability of the cylindrical interface between the vapour and liquid phases of a fluid, when there is a mass and heat transfer across the interface is shown. The exact solutions for the complex Ginzburg–Landau equation are obtained in §3 [22–26]. The conclusion is given in §4.
2 Formulation of the problem and basic equations
We shall use a cylindrical system of coordinates (r,𝜃,z) so that in the equilibrium state, z-axis is the axis of symmetry of the system. The central solid core has a radius a. In the equilibrium state, the fluid phase 1, of density ρ 1, occupies the region a<r<R, and, the fluid phase 2, of density ρ 2 occupies the region R<r<b. The temperature at r = a, r = R and r = b are taken as T 1, T 0 and T 2 respectively. The bounding surfaces r = a and r = b are taken as rigid.
The interface, after a disturbance, is given by the equation
where η is the perturbation in the radius of interface from its equilibrium value R, for which the outward normal vector is written as
We assume that fluid velocity is irrotational in the region so that velocity potentials are ϕ 1 and ϕ 2 for fluid phases 1 and 2. In each fluid phase
The solutions for ϕ j = 0, j = 1, 2 have to satisfy the boundary conditions. The relevant boundary conditions for our configuration are:
(i) On the rigid boundaries r = a and r = b:
The normal field velocities vanish on both the central solid core and the outer bounding surface.
(ii) On the interface r = R + η(z,t):
(1) The conservation of mass across the interface is:
or
where [h] represents the difference in a quantity as we cross the interface, i.e., [h] = h 2−h 1, where superscripts refer to upper and lower fluids, respectively.
(2) The interfacial condition for energy is
where L is the latent heat released when the fluid is transformed from phase 1 to phase 2. Physically, the left-hand side of (7) represents the latent heat released during the phase transformation, while S(η) on the right-hand side of (7) represents the net heat flux, so that the energy will be conserved.
(3) The conservation of momentum balance, by taking into account the mass transfer across the interface, is
where p is the pressure and σ is the surface tension coefficient, respectively.
By eliminating the pressure by Bernoulli’s equation, we can rewrite the above condition (8) as
To investigate the nonlinear effects on the stability of the system, we employ the method of multiple scales [14–16]. Introducing ε as a small parameter, we assume the following expansion of the variables:
where z n = ε n z and t n = ε n t,n=0,1,2.
The linear wave solutions of (3), subject to boundary conditions, yield
where
with I m and K m , m = 0, 1 are the modified Bessel functions of the first and second kinds, respectively.
Substituting (12)–(14) into (9), we obtain the following dispersion relation:
where
From the properties of Bessel functions (is always positive), we notice that the coefficients a 0 and a 1 are greater than zero. Applying the Routh–Hurwitz criteria to (17), the condition for stability is a 2>0, from which we obtain k>1/R. Thus, the system is stable if k>k c, where
With the use of the first-order solutions, we obtained the equations for the second-order problem
where the linear operator \({\nabla ^{2}_{0}}\) is defined as
The non-secularity conditions for the existence of the uniformly valid solution are
and its complex conjugate relation and V g is the group velocity of the wave
We examine now the third-order problem:
On substituting the values of \(\phi ^{(i)}_{1}\) from (15)–(16) and \(\phi ^{(i)}_{2}\) into (21), we obtain
where
and, for brevity of notations, we used
and
where the arbitrary functions H 1 and J 1 can be determined from boundary conditions.
With the third-order solution, the condition for third-order perturbation to be nonsecular is
where
where μ is defined by k = k c + μ ε 2 with k c the critical wave number.
It is now appropriate to introduce the transformations
and
Equation (24) is reduced to
which is a complex Ginzburg–Landau equation, i.e.
The stability of a Ginzburg–Landau equation (25) is discussed by Lange and Newell [17], and Matkowsky and Volpert [18]. They showed that stability conditions are
provided that R r =0.
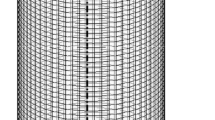
We notice that the condition R r =0 is satisfied when ω=0 and P r = Q r =0. In this case, (25) reduces to the nonlinear diffusion equation (figure 1),
where
with

The velocity potential (42) with different shapes are plotted: (a) solitary wave solutions, (b) contour plot.
3 Exact solutions for the complex Ginzburg–Landau equation
The complex Ginzburg–Landau equation:
where A = A(τ,ξ), P,Q and R are constants. Let
We get two equations:
Consider the travelling wave solutions φ(τ,ξ) = φ(ζ) and ζ = s τ−ν ξ, then eqs (31) and (32) become
The solution of eq. (33) is
where c is the integral constant.
Case 1.
Suppose the solutions of eq. (34) are of the form
where a 0, a 1 are undetermined constants and F(ζ) satisfies the ordinary differential equation (ODE)
where ρ, σ are constants and eq. (37) admits solutions, see [14]:
and
We substitute (36) into eq. (34), using subequation (37) simultaneously. Solving the algebraic equations obtained, yields,
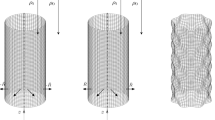
We have solutions to eq. (29) (figures 2, 3 and 4)
where ρ, σ, ν, κ, ω, R, P and Q are arbitrary constants.

The velocity potential (43) with different shapes are plotted: (a) solitary wave solutions, (b) contour plot.

The velocity potential (43) with different shapes are plotted: (a) periodic travelling wave solutions, (b) contour plot.

The velocity potential (49) with different shapes are plotted: (a) travelling wave solutions, (b) contour plot.
Case 2.
Suppose the solutions of eq. (34) are of the form
and F(ζ) satisfies the ordinary differential equation (ODE)
Equation (17) admits solutions, see [14]:
We substitute (44) into eqs (34), using subequation (45) simultaneously. Solving the algebraic equations obtained yields (figure 5),
We have solutions to eq. (29) (figure 6)

The velocity potential (50) with different shapes are plotted: (a) travelling wave solutions, (b) contour plot.

The velocity potential (51) with different shapes are plotted: (a) travelling wave solutions, (b) contour plot.
Case 3.
There is a special case, if we take \(F^{\prime }\) as the form:
where ρ, σ are constants and eq. (52) admits solutions:
We substitute (44) into eq. (34), using subequation (45) simultaneously. Solving the algebraic equations obtained yields (figure 7),
We have solutions to eq. (29)

The velocity potential (55) with different shapes are plotted: (a) travelling wave solutions, (b) contour plot.
4 Conclusion
The nonlinear analysis of Rayleigh–Taylor instability of cylindrical interface between the vapour and the liquid phases of a fluid when there is a mass and heat transfer across the interface was studied. Method of multiple expansions has been used and it is shown that the evolution of the amplitude is governed by the well- known Ginzburg–Landau equation. It is observed that the heat and mass transfer has a stabilizing effect on the stability of the system, while vapour fraction destabilizes the system. By using the F-expansion method, we obtained exact solutions for the nonlinear Ginzburg– Landau equation. The region of solutions was displayed graphically. This is of particular interest for many applications in industrial and environmental processes.
References
D S Lee, Phys. Scr. 67, 420 (2003)
D Y Hsieh, Phys. Fluids 21, 745 (1978)
M K Awasthi, R Asthana, and G S Agrawal, Int. J. Heat Mass Transfer 78, 251 (2014)
D Y Heish, Trans. ASME 94(D), 156 (1972)
K A Khodaparast, M Kawaji, and B N Antar, Phys. Fluids 7, 359 (1994)
D S Lee, J. Phys. A: Math. Gen. 38, 2803 (2005)
M K Awasthi and G S Agrawal, Int. J. Appl. Math. Mech. 7(12), 73 (2011)
R Asthana and G S Agrawal, Physica A 382, 389 (2007)
H J Kim, S J Kwon, J C Padrino, and T Funada, J. Phys. A Math. Theor. 41(33), 335205 (2008)
A H Khater, D K Callebaut, W Malfliet, and A R Seadawy, Phys. Scr. 64, 533 (2001)
A H Khater, D K Callebaut, and A R Seadawy, Phys. Scr. 67, 340 (2003)
A H Khater, D K Callebaut, M A Helal, and A R Seadawy, Eur. Phys. J. D 39, 237 (2006)
A H Khater, D K Callebaut, M A Helal, and A R Seadawy, Phys. Scr. 74, 384 (2006)
M K Awasthi, Int. Commun. Heat Mass Transfer 56, 79 (2014)
A H Khater, D K Callebaut, and A R Seadawy, Phys. Scr. 62, 353 (2000)
R Asthana and G S Agrawal, Int. J. Eng. Sci. 48, 1925 (2010)
S Chandrasekhar, Hydrodynamic and hydromagnetic stability (Dover Publications, New York, 1981)
P H Roberts, Astrophys. J. 137, 679 (1963)
S K Malik and M Singh, Astrophys. Space Sci. 109, 231 (1985)
A R Seadawy, Physica A 439, 124 (2015)
K Zakaria, Physica A 327, 221 (2002)
A R Seadawy, Comp. Math. Appl. 62, 3741 (2011)
A R Seadawy, Appl. Math. Lett. 25, 687 (2012)
A R Seadawy and K El-Rashidy, Math. Comp. Model. 57, 1371 (2013)
A R Seadawy, Comp. Math. Appl. 62, 3741 (2011)
A R Seadawy, Comp. Math. Appl. 70, 345 (2015)
Acknowledgement
This work was supported by the Deanship of Scientific Research, Taibah University, KSA, 2015.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
SEADAWY, A.R., EL-RASHIDY, K. Nonlinear Rayleigh–Taylor instability of the cylindrical fluid flow with mass and heat transfer. Pramana - J Phys 87, 20 (2016). https://doi.org/10.1007/s12043-016-1222-x
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12043-016-1222-x