
Abstract
For a lithium battery, a second-order equivalent circuit model is adopted by studying the battery characteristic, and a state space equation with state of charge (SOC) being one state is constructed. To promote the SOC estimation precision of the extended Kalman filter (EKF) method for a lithium battery, this paper explores a multi-innovation extended Kalman filter (MI-EKF) algorithm to estimate the battery SOC by expanding a single innovation at current instant to multi-innovations containing information from current and previous instants. The aim is to increase the amount of information, and to get the more accurate estimated SOC. In addition, based on the battery difference equation, a stochastic gradient algorithm with a forgetting factor (FFSG) is used to identify the battery parameters. Finally, a lithium battery test bench is set up to sample charge-discharge data and to implement MATLAB simulation experiment; the experiment results confirm that the MI-EKF algorithm can accurately and effectively estimate the battery SOC.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
The SOC estimation methods
The general classification for SOC estimation
Due to SOC being unable directly measured, it can only be computed by using the battery operating voltage and current [5,6,7,8], etc. At present, well-known methods for SOC estimation include the following:
-
The traditional SOC estimation methods contain the ampere-hour (AH) integration method [9] and the OCV method [10,11,12].
-
The data-driven model-based methods [13,14,15,16,17,18,19] mainly include the fuzzy logic method [13, 14], the neural network model-based method [15,16,17], the support vector machine [18], and the difference equation model [19], mostly do not have a physical significance.
-
The mechanism model-based SOC estimation methods [20, 21] contain the electrochemical model methods [22, 23] and the equivalent circuit model (ECM) methods [24,25,26], etc.
The comparison of SOC estimation methods
The traditional SOC estimation methods
The traditional methods are simple in theory and easy to implement. However, the AH integration method is difficult to precisely get the initial SOC, and easy to cause cumulative errors. The OCV method must be in the case of a broken circuit, after the battery is rest for a period of time; this requirement makes online measurement impossible.
The data-driven model-based methods
The neural network and fuzzy model are two main branches of artificial intelligence [13,14,15,16,17] that belong to the data-driven model-based methods. Their corresponding SOC estimation methods do not rely on accurate battery models, but infer the characteristics or mechanism of the battery by analyzing the sampled input-output data of the battery according to the black-box principle. The disadvantage is that they do not give a clear physical meaning.
The mechanism model-based methods
The mechanism model-based methods continuously catch attentions in the lithium battery modeling field due to the definite physical meaning of the battery model. The electro-chemical model is accurate, but the parameters in the model are fairly difficult to obtain.
Among them, the equivalent circuit model (ECM) method is more popular due to its simple and definite physical meaning, and easy to be expressed into a state space equation with SOC being a state [24,25,26]. In all the SOC estimation methods, the ECM method takes a compromise between model precision and complexity; thus it is the most appropriate SOC online estimation technique.
The ECM-based Kalman filter (KF) method
The Kalman filter is the mainstream mean to solve state estimation with SOC being one state in a state space equation formed from the ECM. The basic KF method is a popular linear state identification technique which recursively estimates the state of a linear state space equation by seeking the minimum of the mean square error between the practical state and the optimal estimated state [27, 28]. Because the process and measurement models of the lithium battery are nonlinear functions, the linear KF does not suitable; the extension of a linear KF algorithm becomes necessary.
The extended Kalman filter (EKF) algorithm
The EKF is a well-known nonlinear version of the linear KF algorithm [29]; it adopts the linearization method of the nonlinear function which takes the Taylor expansion to approximate the battery nonlinear function into a linear function [30,31,32], so as to use the KF algorithm to estimate the battery SOC [33]. The limitation is that the error caused by taking the first-order in the Taylor expansion would accumulate with the recursion increasing. The drawback of ignoring higher order terms in Taylor expansion leads to the search of a novel EKF technique. The adaptive EKF algorithm adaptively updates the covariance matrices in Kalman filter estimation method [34]. In addition, the robust EKF could effectively promote the SOC estimation precision caused by the error from incorrect initial SOC values [35].
The unscented Kalman filter (UKF) algorithm
Different from the EKF algorithm, the UKF adopts the unscented transformation (UT) for linearization, introduces sigma points to catch the state posterior mean and covariance without using Taylor expansion for the linearization of the nonlinear battery equation [36,37,38,39], and achieves the precision of second-order Taylor series expansion. Huang et al. evaluated the performance between the EKF and the UKF algorithms [29] to verify the high precision and fast convergence speed of the UKF algorithm. He et al. used the self-adjust UKF to compute the SOC with high precision [40]. But the EKF and UKF algorithms exist problems of dimensionality and divergence. To adapt the high-dimensional state estimation, Arasaratnam et al. presented the cubature Kalman filter technique in 2010 [41].
The cubature Kalman filter (CKF) algorithm
By adopting the radial-spherical cubature rule, the CKF algorithm in SOC estimation is more stable and accurate than the EKF and UKF algorithms [42,43,44]. In addition, the computation of the CKF is more efficient than that of the UKF, especially for high-dimensional system [45]. The comparison among the CKF, the EKF, and the UKF algorithms is carried out in Ref. [46], with the highest accuracy result of the CKF. To promote the CKF performance, Xia et al. explored an adaptive CKF (ACKF) algorithm to estimate SOC [47], compared it with the CKF and EKF algorithms, and verified that the ACKF is the most accurate and robust against measurement error. But the ACKF needs more computation time than that of the CKF and the EKF.
The dual extended Kalman filter (DEKF) algorithm
The thought of the DEKF is to simultaneously estimate the battery SOC and the equation parameters through two filters [48, 49]. By using a state filter and a parameter filter, the DEKF performs online estimation of the equation states and parameters, so as to overcome the influence of measurement and system noises and to provide superior SOC estimation results [50, 51].
The Kalman filtering method introduces the truncation error in the local linearization process for nonlinear battery systems which causes an increase in the error between the estimated value and the real value. In a strong nonlinear system, the filtering may even cause a divergence phenomenon, which seriously affects the SOC estimation accuracy. Most improved Kalman filter algorithms promote SOC estimation accuracy to some extent, but still need further improvements.
The estimation influence under noise corruption
The effect of noises on battery parameter identification is much more dominant due to noises often causing the biased battery parameter estimation in some cases. Wei et al. investigated a recursive total least squares (RTLS)-based observer to effectively attenuate the model identification bias caused by noise destruction, and studied an adaptive forgetting RTLS to compensate the influence of noise and reduce the identification deviation of model parameters [52, 53]. Li et al. explored a bias compensation RLS and EKF co-estimation algorithm for battery SOC estimation under noise corrupted measurements [54].
The Kalman filter type algorithms usually are unbiased. As described in [55], the smaller the value of noise variances, the smaller the estimation error will be. Zhang et al. adopted the cubature Kalman (CKF) filter algorithm to generate the proposal distribution of the particle filter algorithm order, and used the state and measurement residuals to adaptively adjust the weight of sigma points so as to reduce the influence of noise on the CKF algorithm [56]. He et al. adopted an adaptive extended Kalman filter algorithm to estimate battery SOC by continuously using the observation data to estimate and modify the filter under unknown system noise and the observation noise [57]. Dong et al. studied an adaptive anti-interference extended Kalman filter by using an innovation-based adaptive estimator [32].
The multi-innovation method
The multi-innovation theory is originated in 2007 [58], and is used in gradient identification of a linear regression model. The thought of the multi-innovation theory is to extend a scalar innovation at current instant to an innovation vector with current and previous innovations, so as to enhance the error information and promote the estimation accuracy. This paper investigates the multi-innovation EKF (MI-EKF) algorithm [58,59,60,61] to improve the SOC estimation accuracy of the EKF algorithm. The principle is, at each filtering step, to expand the single innovation at current instant to multi- innovations containing information from current and previous instants, to increase the amount of information, and to get the more accurate estimated SOC.
The motivation of this paper is to explore multi-innovation extended Kalman filter (MI-EKF) algorithm to estimate the battery SOC by expanding a single innovation at current instant to multi-innovations containing more information from current and previous instants. The purpose is to increase the amount of information, and to get the more accurate estimated SOC, so as to decrease the SOC estimation error caused by the Kalman filtering method.
The features of this research list are as follows:
-
1.
For a lithium battery, an equivalent circuit model is adopted by analyzing the battery characteristic, and a state space equation with SOC being one state is constructed.
-
2.
State estimates of the MI-EKF algorithm are corrected by multi-innovations containing current and previous innovations rather than the single innovation at only current instant, which improves the SOC estimation accuracy.
-
3.
Simulation experiment results verify that the MI-EKF algorithm can effectively and accurately compute battery SOC by using data sampling from a lithium battery test device.
This research is arranged as follows. The next section describes the lithium battery circuit, constructs a state space equation for the lithium battery and identifies the battery parameters; Section 3 investigates the MI-EKF-based SOC estimation method; Section 4 sets up an experimental platform to collect data and carry out simulation experiment by using the classical EKF algorithm and the investigated MI-EKF algorithm and analyze the results; Finally, the conclusion is evaluated in Section 5.
The modeling of the battery
This section introduces a suitable battery equivalent circuit and constructs a nonlinear battery state space equation.
The circuit model of the battery
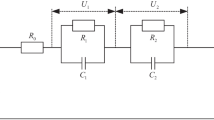
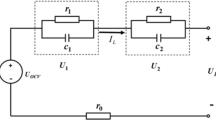
Common battery equivalent circuits have the Thevenin equivalent circuit, the PNGV circuit, the fourth-order dynamic circuit, and the second-order RC circuit [62,63,64]. This research chooses a second-order RC circuit, which is simple in structure, easy to implement, easy to calculate, and easy to combine with battery estimation algorithms. Refer to Fig. 1; the circuit contains UOC, the internal resistance R0, and the equivalent resistances R1C1 and R2C2. U is the battery terminal voltage, I is the terminal current, and the specified current direction is stipulated as discharge being positive and charge being negative.

The battery equivalent circuit

The procedures of the MI-EKF algorithm
According to the Kirchhoff law, the sum of voltage around the entire circuit equals to zero, and then at k instant, we have:
The zero-state voltage responses of the R1 and R2 are:
where the time constant are τ1 = R1C1 and τ2 = R2C2, respectively; Ts is the sampling period.
The zero-input voltage responses of the R1 and R2 are:
The full voltage responses of the R1 and R2 are:
Circuit parameter estimation
The stochastic gradient algorithm with forgetting factor (FFSG) is used to identify the battery parameters. The parameters to be identified include R0, R1, R2, C1, C2. The transfer function of the system can be obtained from Fig. 1:
Using bilinear transformation to discretize continuous functions, let:
where T is the sampling period. The transfer function is discretized as:
where:
The corresponding difference equation derived from the discretized transfer function is:
where:
-
1.
a1, a2, b0, b1, b2 are coefficients to be determined;
-
2.
{U(t)} and {I(t)} are the output and input sequence of the model respectively;
-
3.
{v(t)} is a random noise sequence with zero mean and no correlation.
Let:
where φ(t)is the information vector; θis the parameter vector.
Then we get the FFSG algorithm as follows [65,66,67,68]:
where \( \hat{\theta}(t) \)represents the estimated parameter vector. By using the FFSG algorithm and the equation (7), we can get the estimates of R0, R1, R2, C1 and C2, shown in Table 1.
The nonlinear battery equation
The circuit model includes three energy storage elements, so the state variable of the lithium battery is set to:
According to the definition of SOC, we have
where
-
1.
ηindicates the charge and discharge efficiency, acquired by charge and discharge test. Generally, when charging η = 1, when discharging η < 1
-
2.
CN indicates the rated battery capacity.
From eqs. (4), (14), and (15), the state space equation for a Lithium battery with noises can be written as:
where
-
1.
wk ‐ 1indicates the system process noise with 0 mean and the covariance matrix Qk ‐ 1, i.e., wk ‐ 1~(0, Qk ‐ 1)
-
2.
vkindicates the measurement noise with 0 mean and the covariance matrix Rk, i.e., vk~(0, Rk).
Let:
where \( {x}_{\mathrm{k}}\left[1\right]={SOC}_{\mathrm{k}},{x}_{\mathrm{k}}\left[2\right]={U}_{\mathrm{k}}^{R_1{C}_1},{x}_{\mathrm{k}}\left[3\right]={U}_{\mathrm{k}}^{R_2{C}_2} \).
Then eqs. (18) and (19) can be simply expressed as
The MI-EKF method for SOC estimation
The classical EKF algorithm
The Taylor expansions of xk and Uk are, respectively,


According to the EKF principle, Jacobian matrices of f(•) and h(•) are given by:
Thus, the EKF algorithm can be expressed as:
The investigated MI-EKF algorithm
For nonlinear battery systems, the standard EKF algorithm uses a single innovation to update the state estimates, while the MI-EKF algorithm uses multi-innovations to correct the state estimates, so as to promote the estimation precision [58,59,60,61].
The specific approach is to expand the single innovation:
to an innovation vector Eg, k (i.e., multi-innovations):
where g is the innovation length.
Correspondingly, expand the KF gain Kk to a gain matrix Kg, k.
Then replacing the single innovation ek and the gain Kk in the state estimation equation \( {\hat{x}}_k={\hat{x}}_{k,k-1}+{K}_k{e}_k \) with the innovation vector Eg, k and the gain matrix Kg, k gives the optimized state:
In the equation \( {\hat{x}}_k={\hat{x}}_{k,k-1}+{K}_k{e}_k \), the state corrected term Kkek is obtained by Kk multiplying a single innovation ek. Through expanding ek to Eg, k and Kkto Kg, k, the optimized state \( {\hat{x}}_k={\hat{x}}_{k,k-1}+{K}_{g,k}{E}_{g,k} \) is achieved, and the term Kg, kEg, k is obtained by Kg, k multiplying an innovation vector Eg, k(i.e., multi-innovations). The innovation vector Eg, kcontains multiple innovations (more error corrected information); thus the multi-innovation EKF algorithm is more accurate than the EKF algorithm in SOC estimation.
Summarizing the above derivation yields the multi- innovation EKF (MI-EKF) algorithm as follows:
The steps of the MI-EKF algorithm in eqs. (33)–(40) are listed as follows:
Experiment and simulation
The battery test platform
Referring to Fig. 3, take an actual battery charging and discharging system as an example. Its configuration diagram is displayed in Fig. 4. The battery experiment platform includes a battery tester (NEWARE BTS-4008-5V12A-TB), a median machine, a battery holder, 18,650 (2900 mAh) lithium batteries, and a host computer. The battery specifications are shown in Table 2.

The battery test platform

The configuration diagram of the battery test system
The OCV-SOC relation
The OCV-SOC curve is obtained through a battery static test. The battery static test refers to a method of measuring the OCV in a stable state after stopping charging and discharging for a period of time. The length of the static time determines the accuracy of the OCV measurement.
The principles of the static experiment are as follows:
-
1)
The SOC measurement: the SOC of the battery is unable to get by direct measurement, so the principle of the AH integration method is used for computing SOC.
-
2)
The OCV measurement: it can be seen from the eq. (1) (i.e., \( {U}_k={U}_{OC,k}\left({SOC}_k\right)-{I}_k{R}_0-{U}_k^{R_1{C}_1}-{U}_k^{R_2{C}_2} \)) that during the battery discharging, if the current is turned off and rests for a period of time, the voltages across R0, R1, and R2 become zero as the discharging ends, and the terminal voltage measured at this time can be used as the OCV value.
The steps of the static experiment are as follows:
-
1.
Use different constant current to fully charge the battery for 2 h, and left it for 60 min.
-
2.
The discharge experiment process is shown in Table 3, the sampled data is shown in Table 4.
By using the MATLAB curve fitting toolbox to fit the data of the OCV and SOC calculated by the AH integration method, the OCV-SOC curve is obtained, referring to Fig. 5. The static experiment shows that the OCV measurement accuracy can be improved under the smaller discharge current.

The OCV-SOC curve of the battery
Considering the actual use of lithium batteries in electric vehicles, the lithium battery discharge experimental data is sampled under urban dynamometer driving schedule (UDDS) conditions. Apply the AH method, the EKF technique, and the explored MI-EKF technique to compute SOC based on MATLAB simulation. The simulation results are displayed in Figs. 6, 7, 8, and 9; for the convenience of observation, a partial enlargement map is drawn in the graph.

The estimated/measured SOC by the EKF and the AH methods

The SOC/terminal voltage estimation by the MI-EFK (g = 2) and the AH methods

The SOC/terminal voltage estimation by the MI-EFK (g = 3) and the AH methods

Comparison of the SOC estimation by the MI-EFK algorithm under different g
Figure 6 displays the estimated SOC of the EKF (i.e., the MI-EKF, g = 1) algorithm and the AH method.
Figure 7 displays the SOC and terminal voltage computed by the MI-EKF algorithm (g = 2) and the AH method.
Figure 8 displays the SOC and terminal voltage computed by the MI-EKF algorithm (g = 3) and the AH method.
Figure 9 displays the SOC computed by the MI-EKF algorithm under different g and the AH method, and displays the SOC error of the MI-EKF algorithm and the AH method.
From Fig. 6, 7, 8, and 9, we can get that the SOC estimation error by using the EKF algorithm (i.e., the MI-EKF g = 1) is much larger than the SOC estimation error by using the MI-EKF algorithm (g = 2 and g = 3). Generally, when taking the innovation length g = 3 in the MI-EKF algorithm, the estimated SOC is the most accurate and the SOC error is the smallest.
Noise influence on SOC estimates
The MI-EKF algorithm is unbiased estimation method under random noises corruption, especially under white noise corruption, but the SOC estimation accuracy varies under different variances.
Add an uncorrelated white noise sequence {v(t)} with zero mean and variance σ2 = 0.12, 0.32, 0.52, respectively. The SOC estimation errors under different σ2by using the MI-EFK algorithm are shown in Fig. 10. The following can be seen from the figure:
-
1)
The parameter estimation errors given by the MI-EFK algorithm are generally smaller and approach zero which shows the effectiveness of the proposed algorithms.
-
2)
The estimated SOC errors change small under different white noises. Generally, the estimated SOC errors by the MI-EFK algorithm are close to the true SOC as the noise variance becomes small.

SOC estimation error under different σ values
Conclusion
According to the characteristics of lithium battery, an equivalent battery circuit is adopted and further a nonlinear state space equation is constructed. Through the linearization of the nonlinear battery equation, the EKF technique and the MI-EKF technique are carried out and are compared with the AH method. The experiment results prove that the MI-EKF algorithm can compute the SOC of the lithium battery more accurate and effective than that of the EKF algorithm, and as the innovation length increasing, the errors of the estimated SOC get smaller and smaller. Adding an uncorrelated white noise can slightly influence the SOC estimation error which will be small under small noise.
Due to the increase of the matrix dimension, the computation load of the MI-EKF algorithm is larger compared with that of the standard EKF algorithm, but the calculation precision of the MI-EKF algorithm is much improved compared with that of the EKF algorithm. The proposed method can be extended to study remaining useful life prediction for supercapacitors in Refs. [69, 70], and can apply to model block-oriented dynamic systems in Refs. [71,72,73].
References
Zhou ZK, Kang YZ, Shang YL, Cui NX, Zhang CH, Duan B (2019) Peak power prediction for series-connected LiNCM battery pack based on representative cells. J Clean Prod 230:1061–1073
Duan B, Li ZYQ, Gu PW, Zhou ZK, Zhang CH (2018) Evaluation of battery inconsistency based on information entropy. Journal of Energy Storage 16:160–166
Lyu PZ, Liu XJ, Qu J, Zhao JT, Huo YT, Qu ZG, Rao ZH (2020) Recent advances of thermal safety of lithium ion battery for energy storage. Energy Storage Mater 31:195–220. https://doi.org/10.1016/j.ensm.2020.06.042
Feng L, Ding J, Han YY (2020) Improved sliding mode based EKF for the SOC estimation of lithium-ion batteries. Ionics 26:2875–2882
Xia B, Chen C, Tian Y, Wang M, Sun W, Xu Z (2015) State of charge estimation of lithium-ion batteries based on an improved parameter identification method. Energy 90:1426–1434
Panchal S, Mathew M, Dincer I, Agelin-Chaab M, Frase R, Fowler M (2018) Thermal and electrical performance assessments of lithium-ion battery modules for an electric vehicle under actual drive cycles. Electr Power Syst Res 163:18–27
Duan B, Zhang Q, Geng F, Zhang C (2019) Remaining useful life prediction of lithium-ion battery based on extended Kalman particle filter. Int J Energy Res 44:1724–1734
Zhu R, Duan B, Zhang C, Gong S (2019) Accurate lithium-ion battery modeling with inverse repeat binary sequence for electric vehicle applications. Appl Energy 251:113339
Ng K, Moo C, Chen Y, Hsieh Y (2009) Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl Energy 86:1506–1511
Piller S, Perrin M, Jossen A (2001) Methods for state-of-charge determination and their applications. J Power Sources 96:113–120
Pei L, Zhu C, Lu R (2013) Relaxation model of the open-circuit voltage for state-of-charge estimation in lithium-ion batteries. IET Elect Syst Transp 3:112–117
Zhang Q, Cui N, Li Y, Duan B, Zhang C (2020) Fractional calculus based modeling of open circuit voltage of lithium-ion batteries for electric vehicles. J Energy Storage 27:100945
Hu L, Hu XS, Che Y, Feng F, Lin X, Zhang Z (2020) Reliable state of charge estimation of battery packs using fuzzy adaptive federated filtering. Appl Energy 262:114569
Çeven S, Albayrak A, Bayır R (2020) Real-time range estimation in electric vehicles using fuzzy logic classifier. Comput Electr Eng 83:106577
Hannan M, Lipu M, Hussain A, Saad M, Ayob A (2018) Neural network approach for estimating state of charge of lithium-ion battery using backtracking search algorithm. IEEE Access 6:10069–10079
Chaoui H, Ibe-Ekeocha CC (2017) State of charge and state of health estimation for lithium batteries using recurrent neural networks. IEEE Trans Veh Technol 66(10):8773–8783
Jiao M, Wang D, Qiu J (2020) A GRU-RNN based momentum optimized algorithm for SOC estimation. J Power Sources 459:228051
Hansen T, Wang C (2005) Support vector based battery state of charge estimator. J Power Sources 141:351–358
Liu S, Wang J, Liu Q, Tang J, Liu H, Fang Z (2019) Deep-discharging li-ion battery state of charge estimation using a partial adaptive forgetting factors least square method. IEEE Access 7:47339–47352
Shrivastava P, Soon T, Idris M, Mekhilef S (2019) Overview of model- based online state-of-charge estimation using Kalman filter family for lithium-ion batteries. Renew Sust Energ Rev 113:109233
Liu Z, Dang X, Jing B, Ji J (2019) A novel model-based state of charge estimation for lithium-ion battery using adaptive robust iterative cubature Kalman filter. Electr Power Syst Res 177:105951
Chen M, Bai F, Song W, Lv J, Lin S, Feng Z, Li Y, Ding Y (2017) A multilayer electro-thermal model of pouch battery during normal discharge and internal short circuit process. Appl Therm Eng 120:506–516
Kim M, Chun H, Kim J, Kim K, Yu J, Kim T, Han S (2019) Data-efficient parameter identification of electrochemical lithium-ion battery model using deep Bayesian harmony search. Appl Energy 254:113644
Guo F, Hu G, Zhou P, Huang T, Chen X, Ye M, He J (2019) The equivalent circuit battery model parameter sensitivity analysis for lithium-ion batteries by Monte Carlo simulation. Int J Energy Res 43:9013–9024
Xuan D, Shi Z, Chen J, Zhang C, Wang Y (2020) Real-time estimation of state-of-charge in lithium-ion batteries using improved central difference transform method. J Clean Prod 252:119787
Zhang W, Wang L, Wang L, Liao C (2018) An improved adaptive estimator for state-of-charge estimation of lithium-ion batteries. J Power Sources 402:422–433
Grewal M, Andrews A (2002) Kalman filtering: theory and practice using MATLAB, Second edition. New York
Mastali M, Vazquez-Arenas J, Fraser R, Fowler M, Afshar S, Stevens M (2013) Battery state of the charge estimation using Kalman filtering. J Power Sources 239:294–307
Huang C, Wang Z, Zhao Z, Wang L, Lai C, Wang D (2018) Robustness evaluation of extended and unscented Kalman filter for battery state of charge estimation. IEEE Access 6:27617–27628
Sepasi S, Ghorbani R, Liaw B (2014) Improved extended Kalman filter for state of charge estimation of battery pack. J Power Sources 255:368–376
Guo L, Li J, Fu Z (2019) Lithium-ion battery SOC estimation and hardware-in-the-loop simulation based on EKF. Energy Procedia 158:2599–2604
Dong X, Zhang C, Jiang J (2018) Evaluation of SOC estimation method based on EKF/AEKF under noise interference. Energy Procedia 152:520–525
Plett G (2004) Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: part 3. J Power Sources 134:277–292
Xiong R, He H, Sun F, Zhao K (2012) Evaluation on state of charge estimation of batteries with adaptive extended Kalman filter by experiment approach. IEEE Trans Veh Technol 62:108–117
He H, Xiong R, Fan J (2011) Evaluation of lithium-ion battery equivalent circuit models for state of charge estimation by an experimental approach. Energies 4:582–598
Van der Merwe R, Wan E (2001) The square-root unscented Kalman filter for state and parameter-estimation. ICASSP 6:3461–3464
Li Y, Wang C, Gong J (2017) A multi-model probability SOC fusion estimation approach using an improved adaptive unscented Kalman filter technique. Energy 141:1402–1415
Liu G, Xu C, Jiang K, Wang K (2019) State of charge and model parameters estimation of liquid metal batteries based on adaptive unscented Kalman filter. Energy Procedia 158:4477–4482
Wang R, Feng H (2020) Lithium-ion batteries remaining useful life prediction using wiener process and unscented particle filter. Journal of Power Electronics 20:270–278
He W, Williard N, Chen C, Pecht M (2013) State of charge estimation for electric vehicle batteries using unscented Kalman filtering. Microelectron Reliab 53:840–847
Arasaratnam I, Haykin S, Hurd R (2010) Cubature Kalman filtering for continuous-discrete systems: theory and simulations. IEEE Trans Signal Process 58:4977–4993
Xu W, Xu J, Yan X (2020) Lithium-ion battery state of charge and parameters joint estimation using cubature Kalman filter and particle filter. J Power Electron 20:292–307
Chen L, Xu L, Wang R (2017) State of charge estimation for lithium-ion battery by using dual square root cubature Kalman filter. Math Probl Eng 4:1–10
Zeng Z, Tian J, Li D, Tian Y (2018) An online state of charge estimation algorithm for lithium-ion batteries using an improved adaptive cubature Kalman filter. Energies 11:1–16
Arasaratnam I, Haykin S (2009) Cubature kalman filters. IEEE Trans Autom Control 54:1254–1269
Bhuvana V, Unterrieder C, Huemer M (2013) Battery internal state estimation: a comparative study of non-linear state estimation algorithms. IEEE Veh Power Propul Conf https://doi.org/10.1109/VPPC.2013.6671666
Xia B, Wang H, Tian Y, Wang M, Sun W, Xu Z (2015) State of charge estimation of lithium-ion batteries using an adaptive cubature Kalman filter. Energies 8:5916–5936
Huang J, Wang Y, Wang Z, Han F, Li L (2014) The experiments of dual Kalman filter in lithium battery SOC estimation. Appl Mech Mater 494-495:1509–1512
Tran N, Khan A, Choi W (2017) State of charge and state of health estimation of AGM VRLA batteries by employing a dual extended Kalman filter and an ARX model for online parameter estimation. Energies 10:10010137
Propp K, Auger D, Fotouhi A, Marinescu M, Knap V, Longo S (2019) Improved state of charge estimation for lithium-sulfur batteries. Journal of Energy Storage 26:100943
Wassiliadis N, Adermann J, Frericks A, Pak M, Reiter C, Lohmann B, Lienkamp M (2018) Revisiting the dual extended Kalman filter for battery state-of-charge and state-of-health estimation: A use-case life cycle analysis. Journal of Energy Storage 19:73–87
Wei Z, Zou C, Leng F, Soong B, Tseng K (2018) Online model identification and state-of-charge estimate for lithium-ion battery with a recursive total least squares-based observer. IEEE Trans Ind Electron 65:1336–1346
Wei Z, Zhao J, Xiong R, Dong G, Pou J, Tseng K (2019) Online estimation of power capacity with noise effect attenuation for lithium-ion battery. IEEE Trans Ind Electron 66:5724–5735
Li Y, Chen J, Lan F (2020) Enhanced online model identification and state of charge estimation for lithium-ion battery under noise corrupted measurements by bias compensation recursive least squares. J Power Sources 456:227984
Wang L, He Y (2019) Recursive least squares parameter estimation algorithms for a class of nonlinear stochastic systems with colored noise based on the auxiliary model and data filtering. IEEE Access 7:181295–181304
Zhang K, Ma J, Zhao X, Zhang D, He Y (2019) State of charge estimation for lithium battery based on adaptively weighting cubature particle filter. IEEE Access 7:166657–166666
He H, Xiong R, Zhang X, Sun F, Fan J (2011) State-of-charge estimation of the Lithium-ion battery using an adaptive extended Kalman filter based on an improved Thevenin model. IEEE Trans Veh Technol 60:1461–1469
Ding F, Chen T (2007) Performance analysis of multi-innovation gradient type identification methods. Automatic 43:1–14
Wang DQ, Ding F, Liu P (2009) Multi-innovation stochastic gradient algorithm for output error systems based on the auxiliary model. Am Control Conf https://doi.org/10.1109/ACC.2009.5159814
Liu Y, Yu L, Ding F (2010) Multi-innovation extended stochastic gradient algorithm and its performance analysis. Circuits Syst Signal Process 29:649–667
Ding F, WangX ML, Xu L (2017) Joint state and multi-innovation parameter estimation for time-delay linear systems and its convergence based on the Kalman filtering. Digit Signal Process 62:211–223
Brand J, Zhang Z, Agarwal R (2014) Extraction of battery parameters of the equivalent circuit model using a multi-objective genetic algorithm. J Power Sources 247:729–737
Widanage W, Barai A, Chouchelamane G, Uddin K, McGordon A, Marco J, Jennings P (2016) Design and use of multisine signals for Li-ion battery equivalent circuit modelling, part 2: model estimation. J Power Sources 324:61–69
Kuo T, Lee K, Huang C, Chen J, Chiu W, Huang C, Wu S (2016) State of charge modeling of lithium-ion batteries using dual exponential functions. J Power Sources 315:331–338
Wang DQ, Mao L, Ding F (2017) Recasted models based hierarchical extended stochastic gradient method for MIMO nonlinear systems. IET Control Theory Appl 11(4):476–485
Chen J, Zhu QM, Liu YJ (2020) Modified Kalman filtering based multi- step-length gradient iterative algorithm for ARX models with random missing outputs. Automatica, 118 (2020). DOI: https://doi.org/10.1016/j.automatica.2020.109034
Chen J, Zhu QM, Ding F, Liu YJ (2020) Interval error correction auxiliary model based gradient iterative algorithms for multi-rate ARX models. IEEE Trans Autom Control DOI: https://doi.org/10.1109/TAC.2019.2955030
Chen GY, Gan M, Chen CLP, Li HX (2019) A regularized variable projection algorithm for separable nonlinear least squares problems. IEEE Trans Autom Control 64(2):526–537
Zhou YT, Wang Y, Wang K, Kang L, Peng F, Wang L, Pang J (2020) Hybrid genetic algorithm method for efficient and robust evaluation of remaining useful life of supercapacitors. Appl Energy 260:114169
Zhou YT, Huang Y, Pang J, Wang K (2019) Remaining useful life prediction for supercapacitor based on long short-term memory neural network. J Power Sources 440:227149
Wang DQ, Zhang S, Gan M, Qiu J (2020) A novel EM identification method for Hammerstein systems with missing output data. IEEE Trans Ind Inform 16:2500–2508
Wang DQ, Li L, Ji Y, Yan Y (2018) Model recovery for Hammerstein systems using the auxiliary model based orthogonal matching pursuit method. Appl Math Model 54:537–550
Wang DQ, Yan Y, Liu Y, Ding J (2019) Model recovery for Hammerstein systems using the hierarchical orthogonal matching pursuit method. J Comput Appl Math 345:135–145
Funding
This work was supported by the National Natural Science Foundation of China under Grant Nos. 61873138.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Li, W., Yang, Y., Wang, D. et al. The multi-innovation extended Kalman filter algorithm for battery SOC estimation. Ionics 26, 6145–6156 (2020). https://doi.org/10.1007/s11581-020-03716-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11581-020-03716-0