
Abstract
Maintaining road pavement integrity is crucial for ensuring safe and efficient transportation. Conventional methods for assessing pavement condition are often laborious and susceptible to human error. This paper proposes YOLO9tr, a novel lightweight object detection model for pavement damage detection, leveraging the advancements of deep learning. YOLO9tr is based on the YOLOv9 architecture, incorporating a partial attention block that enhances feature extraction and attention mechanisms, leading to improved detection performance in complex scenarios. The model is trained on a comprehensive dataset comprising road damage images from multiple countries. This dataset includes an expanded set of damage categories beyond the standard four types (longitudinal cracks, transverse cracks, alligator cracks, and potholes), providing a more nuanced classification of road damage. This broadened classification range allows for a more accurate and realistic assessment of pavement conditions. Comparative analysis demonstrates YOLO9tr’s superior precision and inference speed compared to state-of-the-art models like YOLOv8, YOLOv9 and YOLOv10, achieving a balance between computational efficiency and detection accuracy. The model achieves a high frame rate of up to 136 FPS, making it suitable for real-time applications such as video surveillance and automated inspection systems. The research presents an ablation study to analyze the impact of architectural modifications and hyperparameter variations on model performance, further validating the effectiveness of the partial attention block. The results highlight YOLO9tr’s potential for practical deployment in real-time pavement condition monitoring, contributing to the development of robust and efficient solutions for maintaining safe and functional road infrastructure.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Within the sphere of transportation infrastructure, the structural integrity of road pavements is critical for ensuring commuter safety and enabling seamless operational flow. Substandard pavement conditions lead to a reduction in road capacity, characterized by decreased vehicle speeds and an increased risk of accidents due to compromised pavement integrity. Consequently, agencies tasked with pavement maintenance require effective methods for evaluating pavement conditions. Traditional approaches to assessing pavement deterioration are fraught with challenges, including labor-intensive processes and susceptibility to errors in human judgment. The assessment of road pavement conditions culminates in the calculation of the Pavement Condition Index (PCI) [1]. Developing a systematic approach for the accurate detection and categorization of pavement defects would enable engineers to perform timely and efficient pavement condition assessments. Utilizing such assessments, strategic interventions can be planned to improve road conditions, thus restoring them to an acceptable standard. To overcome these challenges, the present study proposes a novel approach that harnesses advancements in deep learning technologies for enhanced pavement condition analysis.
With the advent of advanced computational technologies, image processing methodologies have increasingly become integral to object detection within digital images. The emergence of artificial intelligence has catalyzed the creation of sophisticated automated detection and classification systems. These AI-driven target detection frameworks are fundamentally categorized into one-stage and two-stage detection algorithms. Two-stage algorithms, exemplified by R-CNN [2], Mask-R-CNN [3] and its subsequent iterations, commence with proposal generation prior to target detection. This methodology provides a measured response to class imbalance dilemmas, albeit at the cost of reduced speed, despite aspirations for heightened accuracy. Conversely, one-stage algorithms, such as the YOLO (You Only Look Once) series, directly ascertain the location and classification of targets within the image, thereby achieving remarkable detection velocities. Within the realm of real-time object detection, the YOLO algorithmic suite has undergone a significant evolution, characterized by advancements in detection rapidity, accuracy, and computational thrift. The pioneering YOLOv1 [4] algorithm instigated a transformative wave in the field through the deployment of a unified convolutional neural network that concurrently predicts bounding boxes and class probabilities. Ensuing versions, YOLOv2 [5] and YOLOv3 [6], introduced anchor boxes and multi-scale detection capabilities, respectively, markedly enhancing the detection efficacy for objects of diverse dimensions. Further iterations, YOLOv4 [7] and YOLOv5 [8], honed the architectural framework, optimizing computational dispatch without detracting from precision. Progress persisted with YOLOv6 [9] through YOLOv9 [6, 10], which amalgamated cutting-edge methodologies from the expansive machine learning domain to augment model performance. The most recent iteration, YOLOv10 [11], has instigated a paradigmatic shift by eliminating the necessity for non-maximum suppression (NMS), thus diminishing inference latency and simplifying the object detection schema. The majority of object detection algorithms have been developed based on extensive image detection databases such as COCO and ImageNet, with training data encompassing over 100,000 images. The challenge lies in adapting these aforementioned architectures to specialized datasets, such as pavement damage, where the data available is comparatively limited.
Recent advancements in pavement distress detection leverage deep learning techniques, including multi-scale feature fusion [12], generative adversarial networks [13], and multitask fusion models [14], to enhance accuracy and robustness. UAV-based image capture combined with CNNs, particularly YOLOv3 [15], has shown superior performance in detecting pavement distress. Data augmentation methods, such as crack translators [16], further improve detection models by generating diverse, and realistic datasets. The utilization of deep learning methodologies for the detection of road damage is primarily dependent on the RDD2022 database [17], an open-source repository. This comprehensive dataset contains 47,420 images of road damage, amassed from six distinct nations, and is annotated with over 55,000 instances of various damage types. Designed to bolster the CRDDC2022 challenge, the RDD2022 database is pivotal for the automated detection and classification of road damage via deep learning algorithms, thus serving as a crucial resource for road condition monitoring and the progression of computer vision research. Within the RDD2022 schema, road damage is methodically categorized into four main types: longitudinal cracks, which run parallel to the road’s direction; transverse cracks, perpendicular to the road’s course; alligator cracks, resembling an alligator’s skin with interconnected fissures; and potholes, marked by depressions in the road surface. These classifications are integral to the training of deep learning models, facilitating the autonomous detection and assessment of road damage, which is essential for maintaining safer and well-maintained road infrastructures. Numerous academic publications have sought to refine deep learning approaches for pavement damage detection [18,19,20,21,22,23,24,25]. These endeavors include efforts to augment the existing YOLO architecture by incorporating additional structures and applying diverse augmentation techniques to enhance its efficacy. The classification of pavement damage detection was initially based on the original four categories of the RDD2022 challenge. However, practical applications necessitate more detailed road damage detection classes for the implementation of comprehensive road pavement damage analysis. Consequently, further research is imperative to expand the types of road damage and improve image detection capabilities. Nevertheless, practical pavement design requires an extended range of damage classifications that surpass the four types specified in the RDD2022 database.
In this study, we introduce a lightweight object detection model predicated upon the YOLOv9 architecture. The novel modification incorporates a partial attention block (PSA) [11] into the base model, which precedes the feature map tensor’s progression to the YOLO detection head. Utilizing the RDD2022 database in conjunction with Thailand’s pavement detection database, the model classifies seven unique types of pavement damage. The classifications include longitudinal wheel mark (D00), lateral crack (D10), alligator crack (D20), patching (D30), pothole (D40), crosswalk blur (D43), and white line blur (D44). A comprehensive comparison of the enhanced model’s performance against the current state-of-the-art object detection models, namely YOLOv8, YOLOv9, and YOLOv10, was conducted to verify its improved effectiveness. The principal contributions of this research are as follows:
-
Development of an enhanced object detection model: this research introduces an advanced object detection model, which is predicated upon the architecture of the latest state-of-the-art models. It incorporates an attention mechanism into the model’s architecture, thereby demonstrating augmented precision and expedited inference speeds surpassing those of previous models documented in the literature.
-
Comparative evaluation with specialized dataset: the study conducts a comprehensive evaluation of contemporary state-of-the-art object detection models, specifically YOLOv8, YOLOv9, and YOLOv10, utilizing a specialized dataset for pavement damage. It is noteworthy that the size of this dataset is relatively limited when juxtaposed with the extensive COCO database.
-
Extension of damage detection classification range: an expansion of the damage detection classification range has been realized, transcending the limitations of current state-of-the-art models. This extension offers a more veracious reflection of real-world scenarios pertinent to pavement engineering applications
2 Data characteristics
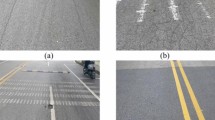
In the present study, pavement distress was systematically classified into seven discrete categories of damage. The primary category, designated as D00, pertains to longitudinal cracking, as illustrated in Fig. 1. Longitudinal cracking, a prevalent form of pavement distress, is typified by fissures aligned parallel to the pavement’s centerline or laydown direction. These cracks may stem from a variety of sources, including fatigue or top-down cracking, and their occurrence can precipitate moisture infiltration, thereby aggravating surface roughness and potentially heralding the onset of alligator cracking and structural failure, denoted as D20. The genesis of longitudinal cracks is complex, often tracing back to inadequate joint construction or improper placement. In contrast, lateral cracks in flexible pavements, identified as D10, are chiefly associated with fatigue cracking—a common mode of distress in such pavements. Fatigue cracking results from the interplay of repetitive, heavy traffic loads and thermal variations, which induce tensile stresses within the pavement matrix. Pothole formation in asphalt pavements is characterized by small, bowl-shaped indentations penetrating through the asphalt layer to the base course, with sharply defined edges and vertical walls at the depression’s upper boundary. Potholes typically develop on roads with thin hot mix asphalt (HMA) overlays and are less frequent on routes with thicker HMA applications. When pavement damage occurs, the remedial strategy involves delineating the impacted zone and incorporating new asphaltic concrete through a procedure known as patching, coded as D30. This technique mitigates localized degradation by restoring the affected area with new material. Additionally, the detection of obscured or faded pavement markings, due to the associated traffic safety hazards, was of interest and is denoted as D44. Similarly, the imperceptibility of pedestrian crosswalks is indicated and coded as D43. The purpose of these two classes of damage is to identify faded or unclear road markings. Repairs are necessary to enhance road safety standards.

The road damage class
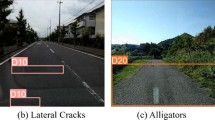
The dataset employed in this study was sourced from the RDD2022 database, enhanced by road detection data linked to the enterprise of the third author. It was further enriched by contributions from five countries, including an additional dataset from Thailand, depicted in Fig. 2. The consolidated data were methodically categorized into seven class groups, as outlined in Table 1, following the guidelines set by the Highway Department of Thailand. This updated dataset version surpasses its predecessor by incorporating new categories relevant to current asphalt repair methods, notably ‘patching’, and clearly distinguishing pedestrian crossings and areas where white traffic lines are less visible. The inclusion of obscured or invisible crosswalks and lane markings adds a layer of complexity for the entity responsible for road upkeep. The data utilized to train the object detection deep learning model were not augmented to ensure an equitable comparison of the capacity of the proposed model with other state-of-the-art (SOTA) models.

Source of image for training
The expansion of damage categories presents formidable challenges for deep learning frameworks, compelling the formulation of sophisticated classification algorithms to refine the prognostic accuracy of damage assessment. The dataset was partitioned into training, validation, and testing subsets to facilitate the model’s training process (refer to Fig. 3), following a distribution ratio of 80/10/10 (training/validation/testing). The validation subset played a pivotal role during the training phase for hyperparameter optimization, while the testing subset was instrumental in gauging the model’s efficacy with novel data. A notable challenge encountered in the application of deep learning was the imbalance in the number of specified images per class. It was observed that the D40 and D43 categories exhibited a lower number of training instances, approximately 500 and 1000, respectively, which could potentially skew the learning process.

Data label characteristics
3 Model architecture
The proposed model, designated as ‘YOLO9tr’, is based on the YOLOv9s architecture [10], which represents the most compact design within the YOLOv9 series (Fig. 4). The primary objective was to develop a lightweight model that maintains the efficiency of larger-scale models for real-time road damage detection. The selection of YOLOv9 as the backbone, rather than YOLOv10, was predicated on preliminary experiments that demonstrated significantly superior performance of YOLOv9 on the utilized dataset. Detailed analysis of this performance differential will be presented in subsequent sections. The YOLOv9s architecture is segmented into three primary components: the backbone, neck, and head. A distinctive feature of YOLOv9s, compared to other larger models, is the absence of an auxiliary model part to assist in identifying the feature map during training. Nonetheless, critical components such as the generalized efficient layer aggregation network (GELAN) are maintained within the model’s architecture. An additional layer of partial attention was incorporated into the feature vector emanating from the neck segment of the model, prior to its transmission to the head segment for detection purposes. This concept of partial self-attention (PSA) was adapted from the YOLOv10 [11] architectural framework. We hypothesize that the PSA layer will enhance the identification of critical layers for road damage detection. This layer was applied to the deeper layers (#4–#6) to facilitate the detection of edges or boundaries, which are the primary characteristics for identifying cracks on pavement, the larger model, YOLO9tr-L, follows a similar concept to the smaller model but incorporates an attention layer across layers #1–#6.

Model architecture improved model from YOLOv9s
The partial self-attention (PSA) architecture employs a sequential process of feature manipulation and attention mechanisms (Fig. 5). Initially, the input undergoes a 1 × 1 convolution, followed by feature partitioning into two segments. The first segment is subjected to a self-attention mechanism within an Attention Block (AB), while the second segment remains unaltered. The AB (Fig. 6) implements a multi-step process where the input feature tensor is divided into three components (key, query, and value) and further bifurcated. The first part of this bifurcation is processed through a self-attention layer, with the key dimension reduced to half the size of the head dimension to optimize computational efficiency. The processed features are then passed through the self-attention layer and fused with the value component, which has been processed through a conventional convolutional layer. Subsequently, two convolutional layers are applied to the output of the AB. The resulting features are then fused with the unaltered second segment from the initial partitioning. This architecture allows for selective application of self-attention, potentially balancing the trade-off between computational cost and feature refinement.

The partial attention block (PSA)

The attention block (AB)
The architecture of partial attention block are shown in Figs. 5 and 6. The attention block (AB) architecture was the concept of the split the feature map into 3 components, query, key and value. Then it will be combined with the partial attention block (Fig. 5). The architecture of the attention block is defined by several key parameters that structure its functionality. The input tensor is \(x\in {\mathbb{R}}^{B\times C\times H\times W}\). The attention block can be defined as follows:
The batch size, denoted by B, is the number of samples processed in parallel during training or inference. The number of channels, C, indicates the depth of the feature map and is crucial for capturing the complexity of the input data. The height and width of the input feature map are represented by H and W, respectively, which together determine the spatial dimensions of the map. The total number of features within the map, N, is computed as the product of H and W. The dimension of each attention head, D, is a critical factor that influences the granularity of the attention mechanism. The attention ratio, R, is a parameter that adjusts the proportionality of the key dimensions in relation to the dimensions of the attention heads. Lastly, the number of attention heads, M, reflects the model’s ability to simultaneously attend to various segments of the input feature map, enhancing its representational power. The output feature map (Y) is obtained by reshaping and projecting the attended features back to the original dimensions. Our model employs several key operations: Conv() for convolution, softmax() for normalizing attention scores, and split() to separate tensor components.
The architecture of the partial attention block is illustrated in Fig. 6. The number of heads was set to 2 for the high input channel at position #6, while the other head count was 1. This architecture integrates a convolutional framework with batch normalization and an Attention Block (AB). Initially, the feature map traverses the AB, where it is bifurcated into two segments. The segment on the right is subsequently channeled into the AB and a convolutional layer. A residual connection is established between the input of the block and the feature map transiting through the block, amalgamated to mitigate the attenuation of gradients that typically occurs in extensive deep learning architectures.
The parameter count of the proposed model increased from 7.1 million (YOLOv9s) to 10.2 million due to the incorporation of an attention layer (Table 3). The selection of the small base model was intended to achieve the smallest possible model for rapid image interpretation. Despite this increase, the model’s parameters remain significantly fewer than those of other state-of-the-art (SOTA) models. Additionally, the lightweight nature of the model is preserved because the PSA architecture does not include query, key, and value tensor weights applied to the input tensor. This omission reduces the size and number of training parameters, thereby maintaining the model’s compactness and enabling rapid image detection.
4 Experiment
The study employed the Vast Ai Cloud computational platform [26], equipped with dual NVIDIA GeForce RTX 4090 GPUs. The deep learning architecture’s construction was enabled through the PyTorch framework (version 2.2.0), while CUDA version 12.1 was utilized as the programming language for the compilation of the code. The YOLOv9 object detection algorithm was sourced from a GitHub repository [27]. Throughout the training phase of the model, mosaic data augmentation was applied at an intensity level of 1.0 and the mixup algorithm was incorporated with a parameter value of 0.5. Input images were standardized to a resolution of 640 × 640 pixels. The batch size was determined according to the maximum available memory capacity. For the training phase, the batch size was set to 20. A total of 200 epochs were allocated for training, with a focus on optimizing the model’s validation performance. The model’s weights were saved at the epoch which yielded the best validation results. The hyperparameter that controls the model’s attention ratio, denoted as R, was set at 0.5. The number of attention heads was determined by the input channel’s dimensions.
4.1 Indicators of evaluation
In the conducted research, the evaluation of the recognition efficacy for road surface damage was performed using a set of metrics: precision, recall, F1-score, FPS (frames per second), and mean average precision (mAP). Precision (P) quantifies the classifier’s accuracy in predicting road surface damage, denoted by the ratio of true positive instances to the overall positive instances identified by the classifier. Conversely, recall (R) measures the classifier’s ability to detect all instances of road surface damage, represented by the ratio of accurately identified positive instances to the total actual positive instances. The mathematical expressions for precision and recall are delineated in Eqs. (4) and (5), respectively:
In this context, TP represents the count of accurately identified positive instances (true positives), FP indicates the quantity of falsely identified positive instances (false positives), FN refers to the number of negative instances incorrectly classified (false negatives), and TN stands for the count of negative instances correctly classified (true negatives).
The mean average precision (mAP) serves as an indicator of the detection precision within target recognition tasks. The mAP is derived by computing the mean of the precision values for each category, which is obtained through the integration of the Precision–Recall (P–R) curve, and subsequently averaging these values. The mAP is then obtained by averaging these AP values across all classes. Mathematically, this can be expressed as:
The F1-score is a harmonizing metric that equilibrates the measures of precision and recall. This metric is designated as the evaluative standard in the IEEE Big Data 2022 Road Damage Detection Challenge. It is mathematically articulated as follows in Eq. (7):
The speed of detection was very important for the object detection of deep learning. The frame per second (FPS) was use as one of the indicator index in this study
The \({t}^{\text{pre}}\) represents the time allocated for preprocessing prior to detection. \({t}^{\text{inference}}\) denotes the duration of the inference process. \({t}^{\text{post}}\) is the time subsequent to inference.
4.2 Experiment results
The results of the model’s training are detailed in Table 2. The precision metrics for the model displayed minimal variation among the different classes. Notably, class D43, which corresponds to blurred crosswalks, registered the highest precision. In contrast, the precision for detecting blurred white lines was the lowest. The detection of potholes and patching, classes D40 and D30, respectively, showed high precision. These were more discernible and straightforward to detect compared to other types of pavement damage, such as cracks. Particularly challenging was distinguishing between alligator cracks and a series of longitudinal cracks. The recall for alligator cracks, class D20, was the lowest among the types of failures detected. Precision for other categories of pavement damage was relatively consistent. The mean Average Precision (mAP50) of our study was significantly lower than that reported in previous research. This difference may be attributed to the greater diversity of detection classes and the unbiased, random selection of images used in our study. In some cases, the detection was so challenging that it bordered on the limits of human visual judgment. Despite the balanced or lower number of training data for D40 and D43 compared to other types of damage (Fig. 3), the mAP50 remained high. This could be attributed to the significantly larger object size of these two classes relative to other damage classes, and the relatively square shape of the detection box, which had a low aspect ratio.
In Table 3, Figs. 7 and 8, we present a comparative analysis of our proposed model against current state-of-the-art (SOTA) models. To maintain the integrity of the comparison, neither our proposed model nor the YOLOv9 series underwent reparameterization. The proposed models, YOLO9tr and YOLO9tr-L, exhibited enhanced performance in terms of mean Average Precision (mAP50), achieving an equilibrium between model dimensions and inference velocity. Our models paralleled the mAP50 values of larger models, such as RT-Deter, YOLOv8x, and YOLO9e, which possess extensive parameter sets. However, these models necessitate substantial computational resources and extended inference time, resulting in diminished frame rates for image detection. In contrast, our models are comparable in size to smaller SOTA models like YOLOv10s and YOLOv8s, yet they significantly outperform them in precision. A notable characteristic of our proposed models is their minimal parameterization, which enables a high frame rate of up to 136 frames per second (FPS) in image detection tasks. The frame rate was calculated using Eq. 8, accounting for the time allocated to preprocessing prior to detection, the duration of the inference process, and the time subsequent to inference. This capability is particularly advantageous for video applications where high frame rates are essential.

The comparison between mAP50 of different model with different parameters

The comparison between mAP50 of different model with FLOPS (G)
5 Visualization
The feature map tensor before and after applying the PSA layer (#6) is shown in Fig. 9. The index used to indicate noise was the signal-to-noise ratio (SNR), defined as the ratio between the mean pixel value and the standard deviation. The SNR of the feature map before applying the PSA layer was 1.730, which was increased to 1.734 after applying the PSA layer. Visualization indicates that the application of a partial self-attention (PSA) layer enhances the quality of feature maps in a neural network. Initially, the feature maps are characterized by distinct, noisy, and scattered spatial distributions, capturing redundant or irrelevant information with less correlation or interaction between features. Post-PSA, the feature maps exhibit more uniformity and smoothness, with refined patterns and reduced noise, suggesting that the PSA layer effectively enhances the consistency and coherence of feature representations. This transformation implies a better integration and correlation of features, leading to more holistic and robust representations. The PSA layer’s ability to focus on more relevant regions reduces noise and emphasizes important features, which is crucial for tasks such as object detection or segmentation. This improvement aligns with findings in the literature where self-attention mechanisms have been shown to enhance feature learning by enabling networks to weigh the importance of different spatial locations more effectively. Consequently, the network can capture and utilize critical features more efficiently, potentially leading to improved overall performance.

The feature map of model before and after applied partial self-attention layer in model
The comparative analysis of image detection capabilities between the proposed model and the state-of-the-art (SOTA) model is illustrated in Fig. 9. The images, sourced from various countries, demonstrate the models’ performance under diverse circumstances and camera angles for pavement damage detection. It is evident that our proposed model discerns finer details compared to other competitive models. Specifically, our model successfully identifies the D00 damage category in the leftmost image, a feat that other models, such as YOLO9e and YOLO8x, fail to achieve. Moreover, in the challenging scenario of a blurred crosswalk depicted in the second image, our proposed model exhibits robust detection capability (Fig. 10).

Detection results of different models
6 Ablation study
The current investigation undertook an ablation study to delineate the ramifications of architectural alterations and hyperparameter adjustments on the model’s performance. Employing YOLO9s as the baseline, it provided a benchmark against which the augmented model, integrated with PSA layers, was evaluated. The experimental framework encompassed a comparative analysis between a single attention layer, illustrated at position #6 in Fig. 4, and a complex attention architecture consisting of six layers. This methodology required each feature map to be processed through the PSA before advancing to the YOLO detection head. Furthermore, the attention ratio parameter was escalated from its initial setting of 0.5 in the prototype to 1.0, aiming to appraise its influence on the model’s functional efficiency. Throughout the comprehensive ablation study, the proposed model manifested superior precision and inference velocity. The YOLO9tr-L model exhibited a marginally elevated mAP50 score. Nonetheless, its inference speed and training duration surpassed that of the proposed model. The YOLO9s, augmented with a solitary attention step, significantly underperformed in mAP50 compared to the unmodified YOLO9s. Efforts to modify larger models, namely YOLOe and YOLOc, by incorporating the PSA layer, did not markedly enhance performance. In fact, the YOLOe modification yielded slightly inferior performance relative to the original model (Table 4).
7 Discussion
The results from the YOLOv9tr model underscore its capability to efficiently and accurately detect pavement damage, advancing the state-of-the-art in object detection. By incorporating a partial attention block into the YOLOv9 architecture, the model leverages enhanced feature extraction and attention mechanisms, leading to improved detection performance, particularly in complex scenarios such as blurred images or intricate damage patterns. In a comparative analysis with contemporary models like YOLOv8 and YOLOv9, YOLOv9tr consistently demonstrated superior precision and inference speed. Specifically, the YOLOv9tr achieved a balance between computational efficiency and detection accuracy, a crucial factor for real-time applications. The model’s precision, particularly in identifying the D00 damage category and maintaining robustness in blurred conditions, outperformed models like YOLOv9e and YOLOv8x, which struggled with these challenging scenarios. The YOLOv9tr model’s capability to process up to 136 frames per second (FPS) positions it as an ideal candidate for real-time monitoring systems. This high frame rate is particularly beneficial for applications in video surveillance and automated inspection systems, where timely detection and response are critical. Additionally, the model's compact architecture, with minimal parameterization and computational load, ensures its deployment feasibility on devices with limited processing power.
An essential contribution of this research is the expansion of the damage classification range, addressing the limitations of existing models that typically categorize only four types of damage. By extending the classifications to include seven types, such as longitudinal wheel marks, lateral cracks, and crosswalk blurs, YOLOv9tr provides a more comprehensive and realistic assessment of pavement conditions. This expanded classification capability is pivotal for pavement engineering applications, where diverse damage types need to be accurately identified and assessed for maintenance and safety purposes. Future research can further optimize the YOLOv9tr model by exploring additional augmentation techniques and integrating more sophisticated attention mechanisms. Moreover, applying this model to other domains requiring real-time object detection, such as autonomous driving or security monitoring, could validate its versatility and robustness. Additionally, expanding the dataset to include more diverse damage scenarios from various geographical regions could enhance the model's generalization capabilities, ensuring its effectiveness in a broader range of real-world applications. In summary, the YOLOv9tr model represents a significant step forward in object detection technology, particularly for applications in pavement damage detection. Its balanced performance, real-time processing capability, and expanded classification range highlight its potential for practical deployment and set a new benchmark for future research in this domain.
8 Conclusion
In conclusion, the YOLOv9tr model demonstrates significant advancements in object detection, particularly in pavement damage detection tasks. Our model exhibits a balanced trade-off between precision, model size, and inference speed, making it suitable for real-time applications. The YOLOv9tr model’s high frame rate of up to 136 FPS is particularly advantageous for video applications, outperforming larger models like RT-Deter, YOLOv8x, and YOLOv9e in terms of precision while maintaining a compact size akin to smaller models such as YOLOv10s and YOLOv8s. The comparative analysis underscores the superior performance of YOLO9tr in detecting finer details and handling challenging scenarios, such as blurred images, more effectively than other state-of-the-art models. Our findings suggest that the YOLOv9tr model holds substantial potential for practical deployment in real-time pavement condition monitoring and other similar applications. The success of the YOLO9tr model in maintaining high precision with minimal parameterization and computational resource requirements underscores its efficacy and utility. Future work could explore further optimizations and the application of this model to other domains requiring efficient and accurate real-time object detection
Data availability
The GitHub repository for the model and trained weights is available at https://github.com/Sompote/YOLO9tr.
References
Ibragimov, E., Kim, Y., Lee, J.H., Cho, J., Lee, J.-J.: Automated pavement condition index assessment with deep learning and image analysis: an end-to-end approach. Sensors 24, 2333 (2024). https://doi.org/10.3390/s24072333
Girshick, R.B., Donahue, J., Darrell, T., Malik, J.: Rich feature hierarchies for accurate object detection and semantic segmentation. In: 2014 IEEE Conference on Computer Vision and Pattern Recognition. arXiv:1311.2524 (2014)
He, K., Gkioxari, G., Dollar, P., Girshick, R.: Mask R-CNN. In: 2017 IEEE International Conference on Computer Vision (ICCV). IEEE (2017)
Redmon, J., Divvala, S., Girshick, R., Farhadi, A.: You only look once: unified, real-time object detection. In: 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 779–788. IEEE, Las Vegas, NV, USA (2016)
Redmon, J., Farhadi, A.: YOLO9000: better, faster, stronger. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. pp. 7263–7271 (2017)
Redmon, J., Farhadi, A.: YOLOv3: an incremental improvement. arXiv preprint arXiv:1804.02767 (2018)
Bochkovskiy, A., Wang, C.-Y., Liao, H.-Y.M.: YOLOv4: optimal speed and accuracy of object detection. CoRR. abs/2004.10934 (2020)
Ultralytics: Ultralytics/yolov5: v7.0–YOLOv5 SOTA realtime instance segmentation. 10.5281/zenodo.7347926 (2022)
Li, C., Li, L., Jiang, H., Weng, K., Geng, Y., Li, L., Ke, Z., Li, Q., Cheng, M., Nie, W., Li, Y., Zhang, B., Liang, Y., Zhou, L., Xu, X., Chu, X., Wei, X., Wei, X.: YOLOv6: a single-stage object detection framework for industrial applications (2022)
Wang, C.-Y., Liao, H.-Y.M.: YOLOv9: learning what you want to learn using programmable gradient information. arXiv preprint arXiv:2402.13616 (2024)
Wang, A., Chen, H., Liu, L., Chen, K., Lin, Z., Han, J., Ding, G.: YOLOv10: real-time end-to-end object detection (2024)
Zhong, J., Zhu, J., Huyan, J., Ma, T., Zhang, W.: Multi-scale feature fusion network for pixel-level pavement distress detection. Autom. Constr. 141, 104436 (2022). https://doi.org/10.1016/j.autcon.2022.104436
Zhong, J., Huyan, J., Zhang, W., Cheng, H., Zhang, J., Tong, Z., Jiang, X., Huang, B.: A deeper generative adversarial network for grooved cement concrete pavement crack detection. Eng. Appl. Artif. Intell. 119, 105808 (2023). https://doi.org/10.1016/j.engappai.2022.105808
Zhong, J., Zhang, M., Ma, Y., Xiao, R., Cheng, G., Huang, B.: A multitask fusion network for region-level and pixel-level pavement distress detection. J. Transp. Eng. Part B Pavements 150, 04024002 (2024). https://doi.org/10.1061/JPEODX.PVENG-1433
Zhu, J., Zhong, J., Ma, T., Huang, X., Zhang, W., Zhou, Y.: Pavement distress detection using convolutional neural networks with images captured via UAV. Autom. Constr. 133, 103991 (2022). https://doi.org/10.1016/j.autcon.2021.103991
Zhong, J., Ma, Y., Zhang, M., Xiao, R., Cheng, G., Huang, B.: A Pavement crack translator for data augmentation and pixel-level detection based on weakly supervised learning. IEEE Trans. Intell. Transport. Syst. (2024). https://doi.org/10.1109/TITS.2024.3402110
Arya, D., Maeda, H., Ghosh, S.K., Toshniwal, D., Sekimoto, Y.: RDD2022: a multi-national image dataset for automatic road damage detection. https://arxiv.org/abs/2209.08538 (2022)
Caltagirone, L., Bellone, M., Svensson, L., Wahde, M.: A deep learning approach for road damage classification. In: International Conference on Intelligent Computing. pp. 1017–1026. Springer (2019)
Yu, G., Zhou, X.: An improved YOLOv5 crack detection method combined with a bottleneck transformer. Mathematics. 11, 2377 (2023). https://doi.org/10.3390/math11102377
Wang, X., Gao, H., Jia, Z., Li, Z.: BL-YOLOv8: an improved road defect detection model based on YOLOv8. Sensors 23, 8361 (2023). https://doi.org/10.3390/s23208361
As Sami, A., Sakib, S., Deb, K., Sarker, I.H.: Improved YOLOv5-based real-time road pavement damage detection in road infrastructure management. Algorithms 16, 452 (2023). https://doi.org/10.3390/a16090452
Zhao, M., Su, Y., Wang, J., Liu, X., Wang, K., Liu, Z., Liu, M., Guo, Z.: MED-YOLOv8s: a new real-time road crack, pothole, and patch detection model. J. Real-Time Image Proc. 21, 26 (2024). https://doi.org/10.1007/s11554-023-01405-5
Guo, G., Zhang, Z.: Road damage detection algorithm for improved YOLOv5. Sci. Rep. 12, 15523 (2022). https://doi.org/10.1038/s41598-022-19674-8
Maeda, H., Sekimoto, Y., Seto, T., Kashiyama, T., Omata, H.: Road damage detection using deep neural networks with images captured through a smartphone. Comput. Aided Civ. Infrastruct. Eng. (2018). https://doi.org/10.1111/mice.12387
Pham, V., Nguyen, D., Donan, C.: Road damages detection and classification with YOLOv7 (2022)
Rent GPUs | Vast.ai. https://vast.ai/, https://vast.ai/
Wong, K.-Y.: WongKinYiu/yolov9. https://github.com/WongKinYiu/yolov9 (2024)
Author information
Authors and Affiliations
Contributions
Author Contributions: The study’s conception and design were collaboratively developed by all authors. Sompote Youwai was responsible for writing the initial draft, conceptualizing the study, developing the software, and validating the results. Achitaphon Chaiyaphat conducted the investigation, prepared the data, trained the model, and managed the labeling process. Pawarotorn Chaipetch contributed to data preparation and labeling tasks.
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Youwai, S., Chaiyaphat, A. & Chaipetch, P. YOLO9tr: a lightweight model for pavement damage detection utilizing a generalized efficient layer aggregation network and attention mechanism. J Real-Time Image Proc 21, 163 (2024). https://doi.org/10.1007/s11554-024-01545-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11554-024-01545-2