
Abstract
Educational robotics has been adopted to create interactive and engaging learning environments to develop computational thinking (CT) in K-12 learners. This study systematically examined 22 peer-reviewed empirical research articles on the use of educational robotics to develop CT in young learners (pre-kindergarten to 6th grade) published between 2012 and 2021. The findings revealed that using robotics activities to develop CT has mostly been studied in the formal education settings with the duration of robotics curricular activities ranging from 80 minutes to 24 hours. The five CT skills studied most often include Sequencing, Conditionals, Loops, Debugging, and Algorithmic Thinking. The different versions of LEGO Mindstorms are the most frequently adopted robotic kits in the examined studies. The most frequently adopted learning and instructional strategies in the robotics activities include collaborative learning, project-based learning, and embodied learning. This paper identified and discussed developmentally appropriated CT skills, robotics kits, and pedagogical approaches suitable for supporting CT development in young learners. The findings can guide educators and instructional designers for future robotics activity design and development endeavors. This paper also identified gaps in the current research and recommended directions for advancing research in adopting robotics to develop CT in young learners.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Computational Thinking
Computational thinking (CT) has evolved into a fundamental skill for K-12 students. A report released by the United States White House has identified developing computational literacy as one of the pathways to succeed in science, technology, engineering, and math (STEM) education, and specified an objective for this pathway as to “make computational thinking an integral element of all educational activities” (Committee on STEM Education, 2018, p.23). National curriculum standards and frameworks for STEM subjects have included CT as a critical skill (Burleson et al., 2018), which underscores the urgency for developing CT in all learners. A widely cited definition states that CT “involves solving problems, designing systems, and understanding human behavior by drawing on the concepts fundamental to computer science” (Wing, 2006, p. 33). Other definitions of CT identify CT as a model of thinking or conceptual foundation used to process information or solve problems effectively and efficiently, with or without the assistance of computing devices (Li et al., 2020; Shute et al., 2017). Since everyone solves problems and processes information, CT is considered foundational (Li et al., 2020; Wing, 2006) and should be developed in every learner starting in early childhood (Papert, 1980; Resnick et al., 2009; Wing, 2006).
Educational robotics can serve as a promising learning approach for CT development, especially for young learners ranging from pre-kindergarten (pre-K) to elementary sixth-grade students ( Bers et al., 2019; Ching et al., 2018). Research has found that educational robotics facilitates students’ cognitive learning of STEM knowledge and problem-solving skills, soft skills such as teamwork and social skills, and affective domains such as attitudes and interests toward STEM subjects and careers (e.g., Altin & Pedaste, 2013; Ching et al., 2019; Hudson et al., 2020; Kandlhofer & Steinbauer, 2016). The robots in the educational robotics activities, serving as manipulatives that can provide immediate feedback, enable children to better understand abstract concepts and problem-solving processes as learning becomes more hands-on, tangible and interactive (Bers et al., 2019; Burleson et al., 2018; Chevalier et al., 2020; Ching et al., 2018; Nam et al. 2019; Pugnali et al., 2017). The increasing availability of age- and developmentally appropriate robotics kits make CT development through programming robots more accessible to young learners who may lack the reading, writing, and typing skills required to create codes that command robot movements (Burleson et al., 2018; Kazakoff & Bers, 2012). However, it is not clear which and how CT skills can be developed through robotics activities in diverse learning settings. In addition, it is not clear how the available robotics kits of varying features serve young learners of diverse developmental abilities. As accumulated research efforts have explored the potential of educational robotics for developing CT in K-12 learners (e.g., Bers et al., 2019; Fanchamps et al., 2021; Wang et al., 2020), this study aims to systematically review the emerging research of using educational robotics to develop CT in young learners, and to synthesize the current understanding of effective adoption of this innovative approach. This review helps expand the understanding of the conditions under which robotics activities can be effectively adopted to develop CT skills in young learners, offer insights into effective curriculum design for robotics activities, and identify directions that advance research.
Literature Review
Computational Thinking
Developing CT in young learners has emerged as a critical need in K-12 education. Papert (1980), a pioneer who proposed to engage young children in computer programming, stated that “learning to communicate with a computer may change the way other learning takes place” (p. 6). Papert envisioned creating computing devices with which young learners can command and communicate using their mathematics knowledge and skills. Papert believed that when children could communicate with a computing device using math, they would find math learning more concreate and natural. More recently, CT has been recognized as not only one of the crucial skills needed to thrive in the twenty-first century (National Research Council, 2010), but also an essential analytical ability that should be developed in every child starting at a young age (Resnick et al., 2009; Wing, 2006). CT involves the skills to understand, analyze and decompose a problem into smaller problems, to identify patterns in the problems, to abstract the problems by focusing on the essence of the problems and ignoring details initially, to design a step-by-step process to solve the problem, and to test and debug the solution (e.g., Barr & Stephenson, 2011; Shute et al., 2017).
A range of CT frameworks have been developed for different purposes and learning contexts (see Hsu et al., 2019; Tikva & Tambouris, 2021, for summaries), while two frameworks are especially relevant to the K-6 learners. The first relevant framework is created by the International Society for Technology in Education (ISTE) and Computer Science Teachers Association (CSTA) (2011). To facilitate K-12 educators’ integrating CT in their classrooms, this framework operationally defined CT as a problem-solving process that includes (but is not limited to): formulating problems, organizing and analyzing data, representing data through abstractions, automating solutions through algorithmic thinking, implementing possible solutions, and generalizing and transferring this problem-solving process. The second relevant framework was developed by Brennan and Resnick (2012) for assessing CT based on their research in coding education. This framework defines three critical dimensions of CT and their elements: concepts (i.e., sequences, loops, parallelism, events, conditionals, operators, and data), practices (i.e., being incremental and iterative, testing and debugging, reusing and remixing, and abstracting and modularizing), and perspectives (i.e., expressing, connecting, and questioning) (Brennan & Resnick, 2012). With clearly defined dimensions and elements, this framework has been widely adopted and cited in the research studies of CT (Merino-Armero et al., 2022). The two aforementioned CT frameworks complement each other. The CT framework by ISTE and CSTA (2011) delineates the macro level of a problem-solving process cycle, while Brennan and Resnick’s (2012) framework specifies the concepts, practices, and perspectives used in solving problems with programming.
As research on CT has grown, several literature reviews on CT research have been conducted (e.g., Hsu et al., 2018; Lye & Koh, 2014; Merino-Armero et al., 2022) and discovered that CT has been mainly developed through on-screen programming activities using computing devices. Nevertheless, programming on-screen can be challenging for younger learners due to the issues of their lacking reading, writing, typing skills, or fine-motor abilities of operating a computer mouse or trackpad (Burleson et al., 2018; Kazakoff & Bers, 2012). Educational robotics has been suggested as a promising approach for young learners to develop CT, leveraging its affordance for physical and interactive learning, and immediate feedback (Bers et al., 2014, 2019; Chevalier et al., 2020).
Learning Affordances of Educational Robotics
Educational robotics has been adopted to engage K-12 students in STEM learning in various educational settings. Educational robotics exemplifies physical computing that learners manipulate and program physical robots to perform certain tasks, address challenges, or solve problems (Ching et al., 2018). The process of constructing and programming robots enables learners to apply, test, and revise their understandings, which aligns closely to the Constructionist view of learning (Papert & Harel, 1991). When young learners actively assemble the robots and observe robots’ enactment of the commands, the robots serve as manipulatives for learners to test their hypotheses, which supports their problem-solving and reasoning (Bers et al., 2019). In addition, the sensory input provided by the robotics activities can foster young learner’s development of abstract concepts (Ching et al., 2018; Nam et al. 2019).
Robotics activities support productive CT development in young learners through tangible and interactive learning. For children who learn through playing and socializing, multiple learners can share robots as learning tools while interacting with each other (Burleson et al., 2018). Compared to on-screen programming, robotics activities with physical robots are found to enhance interactions among peers. Pugnali et al. (2017) examined the differences among groups of 4- to 7-year-old children learning CT through robotics activities versus on-screen block coding activities. The observation data showed that learners in the robotics group could easily look around to examine peers’ activities, leading to more interaction among peers in the form of asking questions and receiving input. In a comparative case study, Burleson et al. (2018) examined 6-year-old children interacting with physical robots using a tangible and spatial programming environment versus virtual robots with an on-screen programming environment in the context of free play and open-ended learning activities. The use of a physical robot and a tangible programming environment facilitated a learning condition in which multiple learners engaged in a collaborative process where learners actively communicated about programming decisions. Robotics activities can provide interactive and collaborative learning environments favorable for youths to learn CT. In multiple studies, Bers and her colleagues found that robotics activities facilitated the development of CT subskills, such as Sequencing, Conditionals, Debugging, in young learners in various formal and informal learning contexts (e.g.,Bers et al., 2014, 2019; Kazakoff & Bers, 2012, 2014). However, as CT involves a range of subskills, which subskills can be effectively learned by young learners through robotics activities remains a question and is examined in this current study.
Present Study
Previous literature review studies mostly examined computational thinking in K-12 education in general (e.g., Hsu et al., 2018; Lye & Koh, 2014). Ioannou and Makridou (2018) reviewed nine empirical studies about the potential of robotics in advancing CT skills and identified only two studies on young learners. More recently, Merino-Armero et al. (2022) conducted a meta-analysis on CT in K-12 education and identified 12 studies that adopted robotics as the approach. While more studies have examined the effectiveness of robotics in CT development, a literature review focusing on the juncture of developing CT for young learners through robotics is needed. The current study aims to systematically examine the collective research evidence on the development of CT skills through educational robotics in young learners. While CT may involve different components and dimensions based on various definitions and frameworks, this review uses “CT skills” as a generic term to refer to various CT dimensions such as concepts, practices, perspectives, and principles that are examined in the research studies. The following questions guide this study:
(1) What are the settings and durations of the educational robotics activities designed to develop CT in young learners?
(2) Which CT skills have been developed through educational robotics activities?
(3) Which robotics kits have been adopted in the reviewed studies?
(4) Which learning and instructional approaches have been adopted to foster CT development in young learners?
Method
Inclusion and Exclusion Criteria
A literature search was performed to locate quality empirical research articles on the use of robotics to develop CT in young learners. The studies were selected based on the following criteria:
-
(1)
Peer-reviewed empirical studies published in academic journals based on actual observations or experimental work;
-
(2)
Studies that focused on learning CT through robotics in educational settings;
-
(3)
Studies that used physical robots in the robotics activities (i.e., excluding studies that used virtual robotics activities);
-
(4)
Studies with participants in pre-K to sixth grade.
Data Sources and Analysis
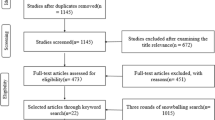
Relevant peer-reviewed research studies were identified through a keyword search in major databases in May 2020, including Academic Search Premier, APA PsycInfo, EdLib, Education Research Complete, ERIC, JSTOR, Sage, Science Direct, and Web of Science. The keywords used in the search included, “computational thinking,” “robot*,” and “education*.” The initial database search resulted in a total of 531 articles. Next, the researchers reviewed all the abstracts and research method sections of the articles when needed, to identify studies that focus on young learners (pre-K to 6th grade) as research participants and involve physical robots in the curriculum/intervention. After inspecting the research method sections, those studies in which CT skills were not assessed were excluded. Eighteen articles meeting the selection criteria resulted in the final selection. Because the Covid -19 pandemic disrupted and delayed the process of this research, in May 2021 another round of literature search was conducted using the same criteria, leading to four more studies being identified and included. In total, 22 studies were analyzed to answer the research questions for this systematic review. It should be noted that two of these included studies were published online first during the literature search time period and later published on paper in 2022 (i.e., Hsiao et al., 2022; Shen et al., 2022).
A full-text review of the 22 studies was conducted by the lead researcher and a spreadsheet was created to document the characteristics of the articles. Next, the articles were imported into NVivo qualitative analysis software for descriptive coding to label information relevant to the four research questions. For examples, various robotics kits adopted in the articles were coded for Research Question 3. After completing the descriptive coding, queries and searches were conducted in NVivo to analyze, collate, and synthesize information. The tables that present the finding summary of each research question were created by the lead researcher and verified by the second author by double checking the information in the reviewed articles to ensure accuracy. Disagreements were resolved through additional review of the studies until consensus was reached.
Results
Overall Characteristics of the Included Research Studies
The 22 studies reviewed were published between 2012 and 2021, with 82% of the studies published in 2019 or later. The studies were conducted in various continents; 59% of the studies took place in the North America, 32% in Europe, and 9% in Asia. Fifty percent of the studies focused on learners in Pre-Kindergarten to 2nd grade. The sample sizes of the studies ranged from two to 191 participants. The leading research method used in these studies is quasi-experimental research design found in 32% of the studies, followed by mixed-methods design found in 18% of the studies. Table 1 presents the characteristics of the 22 studies reviewed.
Settings and Durations of the Robotics Curriculum Activities
Among the 22 studies, 18 studies (82%) took place in formal education settings, including pre-kindergarten to elementary school classrooms (i.e.,Angeli & Valanides, 2020; Baek et al., 2019; Bers et al., 2014, 2019; Cherniak et al., 2019; Chevalier et al., 2020; Chiazzese et al., 2019; Fanchamps et al., 2021; García-Valcárcel-Muñoz-Repiso & Caballero-González, 2019; Hsiao et al., 2022; Kazakoff & Bers, 2012; Kopcha et al., 2021; Moore et al., 2020; Nam et al., 2019; Noh & Lee, 2020; Sáez-López et al., 2019; Shen et al., 2022; Taylor & Baek, 2019). Four studies took place in informal education settings, such as summer camps/programs and after-school programs (i.e.,Kazakoff & Bers, 2014; Luo et al., 2020; Newton et al., 2020; Pugnali et al., 2017).
Most of the reviewed studies developed their unique robotics curriculum activities to meet the research goals and learning needs in their specific educational contexts. The durations of the robotics curriculum activities varied extensively. The shortest robotics activity lasted for 80 min (two 40-min sessions), as found in the Angeli and Valanides (2020) study. The four studies having the relatively short robotics activities (5 h or fewer) all had very young participants from pre-K to 2nd graders (i.e.,Angeli & Valanides, 2020; Bers et al., 2019; Cherniak et al., 2019; Moore et al., 2020).
Five studies used the more sustained robotics curricula that lasted 20 h or more (i.e.,Bers et al., 2014; García-Valcárcel-Muñoz-Repiso & Caballero-González, 2019; Hsiao et al., 2022; Kazakoff & Bers, 2012; Newton et al., 2020). Hsiao et al. (2022) presented the most sustained robotics curriculum for a total of 24 h (two 40-min sessions per week, including assessments, across 18 weeks) for 6th graders. Three studies adopted or modified from the 20-h long “TangibleK” curriculum developed by Bers and colleagues (i.e.,Bers et al., 2014; García-Valcárcel-Muñoz-Repiso & Caballero-González, 2019; Kazakoff & Bers, 2012), a robust curriculum that develops multiple CT skills in kindergarteners. This is the only curriculum in the reviewed studies that has been implemented in multiple contexts; the lesson outline of which can be found in Bers et al. (2014). Table 2 below shows the durations of the robotics curriculum activities in the reviewed studies. Three studies were not included in Table 2 due to unclear descriptions of their curriculum activity durations (i.e.,Kopcha et al., 2021; Noh & Lee, 2020; Sáez-López et al., 2019).
CT Skills Developed
The 22 empirical studies collectively examined 25 relevant CT skills. The top five most studied CT skills among the reviewed studies include Sequence (13 studies), Conditionals (8 studies), Loops (6 studies), Debugging (6 studies), and Algorithmic Thinking (5 studies). Table 3 below shows the five most studied CT skills and the studies where these skills are identified.
Sequencing has been examined most extensively among the reviewed articles, appearing in 13 studies (i.e.,Angeli & Valanides, 2020; Bers et al., 2014, 2019; García-Valcárcel-Muñoz-Repiso & Caballero-González, 2019; Hsiao et al., 2022; Kazakoff & Bers, 2012, 2014; Luo et al., 2020; Nam et al., 2019; Newton et al., 2020; Pugnali et al., 2017; Sáez-López et al., 2019; Taylor & Baek, 2019). Sequencing, defined as a series of individual steps or instructions (Brennan & Resnick, 2012), is a critical component for early mathematics and literacy learning (see Kazakoff & Bers, 2012, for a substantial literature review). These reviewed studies found that even the youngest learners (pre-kindergarten to 2nd grade) were able to learn and improve their Sequencing skills through robotics activities. For example, Bers and colleagues conducted several studies on using various robotics kits to successfully develop Sequencing skills in kindergarten learners in both formal and informal learning contexts.
Conditionals, defined by Brennan and Resnick (2012) as making decisions based on conditions, was examined in 8 studies (i.e., Bers et al., 2014, 2019; Hsiao et al., 2022; Luo et al., 2020; Newton et al., 2020; Pugnali et al., 2017; Sáez-López et al., 2019; Taylor & Baek, 2019). Among them, five studies examined the learning or use of Conditionals in 3rd to 6th grades. For example, Newton et al. (2020) presented transcribed video episodes as the evidence of using conditional reasoning by a fifth-grade learner. Luo et al. (2020) explored the evolution of two girls developing various CT concepts and practices, including Conditionals. Meanwhile, Bers et al. (2014) examined kindergarteners’ development of computational concepts, and found that Conditionals, like Loops and other more complicated concepts, was more challenging for kindergarteners to grasp.
Loops (also known as repeats or iterations in some studies), defined by Brennan and Resnick (2012) as running the same sequence multiple times, is examined in six studies (i.e., Bers et al., 2019; Hsiao et al., 2022; Luo et al., 2020; Pugnali et al., 2017; Sáez-López et al., 2019; Taylor & Baek, 2019), four of which focused on learners who were 3rd grade and higher. For example, Sáez-López et al. (2019) found that the implemented robotics unit resulted in statistically significant positive development of Loops together with other concepts (e.g., Sequencing and Conditionals) in 6th graders, compared to the control group.
Debugging (i.e., identifying and fixing errors in the codes, as defined by Bers et al., 2019), was also examined in six studies (i.e., Angeli & Valanides, 2020; Bers et al., 2014, 2019; García-Valcárcel-Muñoz-Repiso & Caballero-González, 2019; Pugnali et al., 2017; Taylor & Baek, 2019), with five of those examining learners from pre-K to 2nd grade. For instance, Bers et al. (2014) assessed kindergarteners debugging skills and found that their average scores ranked mostly 3 to 4 on a 5-point scale measure when they completed seven robotics activities. Angeli and Valanides (2020) used a rubric to assess the debugging strategies (as well as the decomposition skill) adopted by 5- or 6- year-old learners, and found that most of the children decomposed the task into sub-tasks when debugging. The reviewed studies showed that the Debugging skill can be developed in learners starting at very young ages.
Algorithmic Thinking, defined by Shen et al. (2022) as devising a step-by-step solution to solve a problem, was examined in 5 studies (i.e., Angeli & Valanides, 2020; Baek et al., 2019; Chiazzese et al., 2019; Fanchamps et al., 2021; Shen et al., 2022) with learners of various ages from kindergarteners to 5th graders. For example, Shen et al. (2022) developed and implemented a humanoid robotics curriculum that involved fifth graders in creating solution algorithms (i.e., the coded steps of drawing a triangle). In Angeli and Valanides (2020) study, kindergarteners created algorithms that commanded the movements of a bee-shaped robot on a mat. Since Algorithmic Thinking is to devise a solution in ordered steps, the complexity of the problem dictates the scale of the algorithms devised. The review shows that the development of Algorithmic Thinking can start at very young ages with less complex problems.
Overall, CT skills were measured in various ways among the 22 reviewed studies. Many studies measured CT through well-defined computational concepts and practices, such as Sequencing, Conditionals, Loops, and Debugging. Only a handful of studies (e.g., Baek et al., 2019; Chevalier et al., 2020; Chiazzese et al., 2019; Shen et al., 2022) adopted a more macro view and measured CT in terms of a set of problem-solving processes such as understanding the problem, generating ideas, formulating the behavior, programming the behavior, and evaluating the solution. In addition, CT was measured in terms of individual skills (e.g., Debugging in Bers et al., 2014), or by a holistic scale resulted from aggregating various skills (e.g., Chiazzese et al., 2019; Hsiao et al., 2022; Taylor & Baek, 2019). For example, the Berbars tasks adopted in several studies (i.e., Baek et al., 2019; Chiazzese et al., 2019; Noh & Lee, 2020), combined CT skills to form questions/tasks of varied levels of difficulties.
Robotics Kits Adopted in the Studies
Age-appropriate robotics kits are critical in facilitating the development of CT in young learners. Fifteen distinctive robotics kits were adopted in the 22 reviewed studies. The most frequently adopted robotics kits are the LEGO Mindstorms robotics kits (NXT or EV3) with on-screen programming environment (i.e., Baek et al, 2019; Fanchamps et al., 2021; Newton et al., 2020; Taylor & Baek, 2019). These kits offer robots equipped with multiple sensors and powerful on-screen block-based programming language environments capable of complicated programming commands. While these kits had been used for kindergarteners and lower elementary school students in earlier robotics studies, the on-screen programming environment was challenging for these very young learners. Researchers (e.g., Kazakoff & Bers, 2012) invented a more tangible programming environment, CHERP, where youngest learners can arrange wood blocks that represent codes to program the robots. The LEGO Mindstorms kits with the CHERP programming environment were used in three reviewed studies (i.e., Bers et al., 2014; Kazakoff & Bers, 2012, 2014).
The KIBO robotics kit, developed by researchers and now commercially available, was adopted in two studies (i.e., Bers et al., 2019; Pugnali et al., 2017). Two other studies used Bee-Bots (i.e., Angeli & Valanides, 2020; García-Valcárcel-Muñoz-Repiso & Caballero-González, 2019), and one study employed a similar kit called Code and Go Robot Mouse (i.e., Moore et al., 2020). The robotics kits designed for the youngest learners (pre-K to 2nd graders), such as KIBO, Bee-Bots, and Code and Go Robot Mouse, feature simple robots with limited capabilities for modifying the robot appearance/functionalities. Unlike LEGO Mindstorms kits which allow learners to design and build their own robots using LEGO pieces, these robots are prebuilt for young learners; thus, learners are limited in modifying the appearance and functionalities of the robots. In addition, these robotics kits use screen-free programming methods, enabling the development of CT accessible to the youngest learners. Bee-Bots and Code and Go Robot Mouse have several buttons on the robots that allow young kids to push the buttons to command the robot movement. With KIBO robotics kits, learners are able to sequence wood blocks symbolizing specific movements and scan the codes printed on the wood blocks using the robot to enter the commands. Table 4 presents an overview of the most frequently adopted kits.
Learning and Instructional Approaches Adopted
The reviewed studies as a collection examined a range of learning and instructional approaches to develop CT through robotics in young leaners, with collaborative learning, project-based learning (PBL), and embodied learning being the three most frequently adopted approaches. Noticeably, recognizing the benefits and importance of collaboration, 15 studies adopted group work or incorporated collaborative strategies in the robotics activities for CT development with various levels of elaboration and justification on the use of the instructional approaches (i.e., Angeli & Valanides, 2020; Baek et al., 2019; Bers et al., 2019; Cherniak et al., 2019; Chevalier et al., 2020; Chiazzese et al., 2019; Fanchamps et al., 2021; García-Valcárcel-Muñoz-Repiso & Caballero-González, 2019; Kopcha et al., 2021; Moore et al., 2020; Nam et al., 2019; Newton et al., 2020; Noh & Lee, 2020; Pugnali et al., 2017; Taylor & Baek, 2019). For example, Chevalier et al. (2020) grouped 3rd and 4th graders into small groups of two to three students to undertake the robot lawnmower mission. Fanchamps et al. (2021) paired 5th and 6th grade students to solve the robotics programming challenge. Peer coaching is an established and well-documented approach that has positive impact on both mentors and mentees in programming education (e.g., Martin-Ramos et al., 2017). Using a peer coaching approach, Chiazzese et al. (2019) assigned one or two high school students to work with a group of four younger learners to support their robot building and programming process. Taylor and Baek (2019) examined grouping strategies and reported that assigning group roles had a significantly positive effect on 4th and 5th graders’ CT development while gender composition of the groups had no effects on CT development.
While many reviewed studies engaged learners in robotics projects as learning tasks, only five reviewed studies specifically cited PBL as an instructional approach that can enhance robotics activities and CT development (i.e.,Baek et al., 2019; Cherniak et al., 2019; Chiazzese et al., 2019; Fanchamps et al., 2021; Sáez-López et al., 2019). PBL engages students in the inquiry process of researching relevant information, and creating and testing solutions to a posted question (Blumenfeld et al., 1991). Two of the reviewed studies clearly indicated that PBL was adopted to design the robotics curriculum activities (Baek et al, 2019; Cherniak et al., 2019). Baek et al. (2019) reported using PBL to design a robotics curriculum where learners designed and programmed robots to find water in a simulated Mars environment. In their robotics curriculum, Cherniak et al. (2019) first employed two pre-designed robotics curriculum activities as scaffolds: one project on designing a robot to help animals cross the road safely at night, and the other on helping an injured mail carrier move heavy packages. After working on these two projects, small groups of young learners designed robots to solve a problem identified by themselves, and presented their robots to the rest of their class. They reported that engaging young learners in problem finding and problem posing through PBL robotics activities makes STEM accessible to young learners with diverse backgrounds.
Embodied learning was encouraged, integrated, or observed in several studies (i.e., Baek et al., 2019; Kopcha et al., 2021; Moore et al., 2020; Newton et al., 2020). Embodied perspective of cognition argues that cognition is a result of the interactions among our brain, body, and the environment (Kopcha et al., 2021). The reviewed studies found that young learners can learn and demonstrate abstract CT concepts with the support of bodily activities in the physical world. Moore et al. (2020) found that when 2nd grade learners were programming a robotic mouse to navigate through mazes, they used embodied movements to communicate programming ideas with peers and to assist their translation among multiple representations. Kopcha et al. (2021) analyzed a pair of 5th graders’ embodied interaction with robots when they participated in an educational robotics activity through which the learners programed a robot to move on a large grid. It was found that learners represented their CT through their own body languages as they frequently used their bodies to simulate the proposed robot’s actions when communicating their ideas with teammates. In the Baek et al. (2019) study, embodied activities were employed as a scaffolding strategy to have 2nd graders use their own bodies to emulate and predict robot actions before they programmed the robots. One of the benefits of acting out a series of movements is to dissect the movements into individual steps. The broken-down steps tend to be more concrete to and easily perceived by young learners.
Other approaches used to design or scaffold the robotics activities involved the Understand/Use-Modify-Create (U2MC) strategy developed by Lee et al. (2011) and adopted in Baek et al. (2019), and the 6E Model (i.e., Engage, Explore, Explain, Engineer, Enrich, and Evaluate by Burke, 2014) adopted in Hsiao et al. (2022). Not all of the reviewed studies provided clear descriptions of the learning/instructional strategies adopted in the studies; some of them only reported the robotics content topics they covered.
Discussion
In this research, 22 empirical studies were reviewed and examined for the collective research evidence on the development of CT skills through robotics in young learners. This review reveals that the research in this area has grown rapidly in recent years, with 82% of the reviewed studies published in 2019 or later. Upon further examination, 82% of the reviewed studies took place in formal educational settings, indicating that robotics activities have been mainly designed for the context of school learning and classroom implementation. The durations of the robotics curriculum activities used in the reviewed studies varied extensively, ranging from the shortest of 80 min in one study (i.e., Angeli & Valanides, 2020), to the most sustained curricula lasting 20 h or more in five studies (e.g., Bers et al., 2014). The variation in the length of all the robotics activities seems to suggest that robotics activities for young learners can be versatile and purposeful to achieve the intended CT skills. Future research studies are encouraged to replicate or build upon the effective robotics curricula reviewed in this study to further validate the findings in various learning contexts and with diverse participants.
This study offers implications for future robotics curriculum design in selecting developmentally appropriate CT skills. The reviewed literature has established that robotics activities are effective in developing Sequencing in the youngest learners (pre-k to 2nd graders), a critical concept and skill to be developed in early mathematics and literacy learning (Kazakoff & Bers, 2012). Robotics activities can also benefit the development of more challenging CT concepts such as Conditionals and Loops, in 3rd to 6th graders. Learners as young as pre-K to 2nd graders can develop Debugging skills through robotics activities. Young learners often use the trial-and-error strategy as the initial debugging strategy (e.g., Baek et al., 2019) despite it may not be the most efficient one. As robotics activities can provide sensory feedback and facilitate abstract thinking in young learners, building on current understanding of debugging practices in young learners (e.g., Rich et al., 2019), the advantage of using robotics to develop more advanced debugging strategies needs to be further researched. In addition, Algorithmic Thinking was found to be developed in kindergarteners to 5th graders. Applying Algorithmic Thinking successfully requires the use of multiple fundamental CT skills (e.g., Katai, 2015), and depends on the complexity and difficulty level of the problems. Robotics activities enable and motivate young learners to learn and apply Algorithmic Thinking through tangible robots, interactive tasks and immediate feedback, echoing previous research findings on the environments to develop Algorithmic Thinking skill in young learners (Futschek & Moschitz, 2011).
Overall, a wide array of assessment methods of computational thinking was found in the 22 reviewed studies. This study revealed that many reviewed studies assessed well-defined computational thinking concepts and practices that were aligned more closely with Brennan and Resnick’s (2012) framework; whereas only sporadic studies adopted a more macro view of computational thinking and examined the problem-solving processes similar to the definition of computational thinking of ISTE and CSTA (2011). Future studies are encouraged to address this gap in the literature. Establishing valid and reliable assessment methods to measure CT development has been a pressing area for advancing research in computational thinking. In their editorial, Angeli and Giannakos (2020) stated that “there is a need for future research to identify ways about how CT can be assessed either as a holistic measure or as an array of sub-skills within the context of authentic problem solving across all subjects and disciplines (p.3).” Future studies are also encouraged to leverage the affordance of educational robotics to design and develop authentic and performance-based assessments that enable learners to externalize and demonstrate their developed CT skills.
Adopting developmentally appropriate robotics kits for young learners is critical in ensuring successful learning experiences (Bers et al., 2014). Some reviewed studies reported that challenges in using the hardware and software of robotics kits were sources of frustration and took away precious time for learners to engage in collaborative and interactive CT tasks (e.g., Bers et al., 2014, 2019; Moore et al., 2020). Based on this review, it is recommended that the very young learners, pre-K to 2nd graders, use robotics kits with simple robots featuring limited functionality with screen-free programming environments that adopt methods such as pushing buttons or arranging physical programming manipulatives (e.g., wood blocks) to create the codes. Third- to sixth-grade learners are more capable of using robotics kits with more advanced functionality and on-screen block-based programming environments to program the robots. This recommendation contributes to the call by Ioannou and Makridou (2018) for establishing a repository of robotics platforms specifically focusing on the platforms for young learners.
This review shows that collaborative learning, Project-based Learning, and embodied learning are the three most frequently adopted pedagogical approaches for CT development in young learners through robotics. This finding is similar to Hsu et al. (2018) review that also identified PBL and collaborative learning as two of the most adopted strategies for learning and teaching CT in K-12 settings. The current review validates that collaborative learning and PBL are also critical strategies used in developing CT through robotics in young learners. Nevertheless, effective participation of young learners in collaborative robotics activities needs to be facilitated and further studied (e.g., Newton et al., 2020). While PBL is also identified as a frequently adopted strategy in this review, effective adoption of PBL to guide the design of the robotics activities needs to be further examined and articulated more in future studies.
Embodied learning seems to be a strategy more unique to the use of robotics for CT development in young learners. In their review, out of 120 studies, Hsu et al. (2018) found that only one study adopted embodied learning strategy for teaching CT in K-12 settings. In the current review, several studies have reported that young learners spontaneously used their body language (e.g., gestures, movements, facial expressions) to reason, communicate their prediction, imitate robot movements, or translate between various representations (e.g.,Kopcha et al., 2021; Moore et al., 2020). Embodied activities can help reduce the cognitive load of translating between representations during the robotics tasks (Moore et al., 2020), and further scaffold young learners’ acquisition of abstract concepts (Wellsby & Pexman, 2014). As embodied activities naturally emerged when young learners engage in robotics activities, from an assessment perspective, learners’ embodied activities may serve as data points that can provide snapshots of their ongoing development of CT skills (Kopcha et al., 2021). In addition, research on integrating embodied learning interventions in math and reading education found that content-related body movements resulted in more learning (Skulmowski & Rey, 2018). Future studies are encouraged to explore effective design and integration of embodied learning activities to scaffold and strengthen CT development through robotics. Overall, the three most frequently adopted instructional/learning strategies identified in this review shed lights on evidence-based pedagogical approaches for developing CT through robotics for pre-K to 6th graders.
Limitations
This study was limited by the inclusion criteria and databases used to select studies for this review. The studies not indexed in the databases used by the researchers were not included. Researchers’ interpretation may also come into play when they scrutinized the database search results regarding intended learners and the inclusion of CT skills. In addition, not all of the selected studies provide a clear definition of CT or sufficient descriptions of the robotics interventions, making the comparison and synthesis of findings challenging and subject to interpretation of the researchers.
Conclusion
Educational robotics has been increasingly adopted to create collaborative, interactive, and engaging learning environments in K-12 learners for their development of CT skills. This systematic literature review expands the understanding of conditions under which robotics activities can be effectively adopted to develop CT skills in young learners and offers insights into effective curriculum design for robotics activities. This study reveals that 82% of the reviewed studies took place in formal educational settings. The durations of the robotics curriculum activities varied extensively from 80 min to more than 20 h, suggesting that robotics activities for young learners can be versatile and purposeful to achieve the intended CT skills. The five most frequently developed CT skills in young learners are Sequencing, Conditionals, Loops, Debugging, and Algorithmic Thinking. While LEGO Mindstorms were the most frequently adopted robotics kits in the reviewed studies, other robotics kits such as KIBO and Bee-Bots are more developmentally appropriate for pre-K to second grade learners. Collaborative learning, Project-based Learning, and embodied learning are found to be the most adopted pedagogical approaches that foster CT development in pre-K to sixth grade classrooms. Gaps and future research directions are discussed in the Discussion section to help advance research development in this critical area. This study also provides practical implications for educators and instructional designers to effectively integrate robotics to develop CT in young learners.
References
Altin, H., & Pedaste, M. (2013). Learning approaches to applying robotics in science education. Journal of Baltic Science Education, 12, 365–378.
Angeli, C., & Giannakos, M. (2020). Computational thinking education: Issues and challenges. Computers in Human Behavior, 105, 106185. https://doi.org/10.1016/j.chb.2019.106185
*Angeli, C., & Valanides, N. (2020). Developing young children’s computational thinking with educational robotics: An interaction effect between gender and scaffolding strategy. Computers in Human Behaviour, 105, 105954. https://doi.org/10.1016/j.chb.2019.03.018
Barr, V., & Stephenson, C. (2011). Bringing computational thinking to K-12: What is involved and what is the role of the computer science education community? ACM Inroads, 2(1), 48–54. https://doi.org/10.1145/1929887
Bers, M. U., Flannery, L., Kazakoff, E. R., & Sullivan, A. (2014). Computational thinking and tinkering: Exploration of an early childhood robotics curriculum. Computers & Education, 72, 145–157. https://doi.org/10.1016/j.compedu.2013.10.020
*Baek, Y., Wang, S., Yang, D., Ching, Y.-H., Swanson, S., & Chittoori, B. (2019). Revisiting Second Graders’ Robotics with an Understand/Use-Modify-Create (U2MC) Strategy. European Journal of STEM Education, 4(1). https://doi.org/10.20897/ejsteme/5772
Bers, M. U., González-González, C., & Armas-Torres, M. B. (2019). Coding as a playground: Promoting positive learning experiences in childhood classrooms. Computers & Education, 138, 130–145. https://doi.org/10.1016/j.compedu.2019.04.013
Blumenfeld, P., Soloway, E., Marx, R., Krajcik, J., Guzdial, M., & Palincsar, A. (1991). Motivating project-based learning: Sustaining the doing, supporting the learning. Educational Psychologist, 26(3/4), 369–398.
Brennan, K., & Resnick, M. (2012). New frameworks for studying and assessing the development of computational thinking. Paper presented at Annual American Educational Research Association meeting. Vancouver.
Burke, B. N. (2014). The ITEEA 6E Learning byDeSIGN™ Model: Maximizing informed design and inquiry in the integrative STEM classroom. Technology and Engineering Teacher, 73(6), 14–19.
Burleson, W. S., Harlow, D. B., Nilsen, K. J., Perlin, K., Freed, N., Jensen, C. N., Lahey, B., Lu, P., & Muldner, K. (2018). Active learning environments with robotic tangibles: Children’s physical and virtual spatial programming experiences. IEEE Transactions on Learning Technologies, 11(1), 96–106. https://doi.org/10.1109/TLT.2017.2724031
Chevalier, M., Giang, C., Piatti, A., & Mondada, F. (2020). Fostering computational thinking through educational robotics: A model for creative computational problem solving. International Journal of STEM Education, 7, 39. https://doi.org/10.1186/s40594-020-00238-z
Chiazzese, G., Arrigo, M., Chifari, A., Lonati, V., & Tosto, C. (2019). Educational robotics in primary school: Measuring the development of computational thinking skills with the Bebras Tasks. Informatics, 6(4), 43. https://doi.org/10.3390/informatics6040043
Ching, Y.-H., Hsu, Y.-C., & Baldwin, S. (2018). Developing computational thinking with educational technologies for young learners. TechTrends, 62(6), 563–573. https://doi.org/10.1007/s11528-018-0292-7
Ching, Y.-H., Yang, D., Wang, S., Baek, Y., Swanson, S., & Chittoori, B. (2019). Elementary school student development of STEM attitudes and perceived learning in a STEM integrated robotics curriculum. TechTrends, 63(5), 590–601. https://doi.org/10.1007/s11528-019-00388-0
Cherniak, S., Lee, K., Cho, E., & Jung, S. E. (2019). Child-identified problems and their robotic solutions. Journal of Early Childhood Research, 17(4), 347–360. https://doi.org/10.1177/1476718X19860557
Committee on STEM Education. (2018). Charting a course for success: America’s strategy for stem education. National Science and Technology Council, December, 1–35. Available at https://www.energy.gov/sites/default/files/2019/05/f62/STEM-Education-Strategic-Plan-2018.pdf
Fanchamps, N. L. J. A., Slangen, L., Hennissen, P., & Specht, M. (2021). The influence of SRA programming on algorithmic thinking and self-efficacy using Lego robotics in two types of instruction. International Journal of Technology and Design Education, 31(2), 203–222. https://doi.org/10.1007/s10798-019-09559-9
García-Valcárcel-Muñoz-Repiso, A., & Caballero-González, Y.-A. (2019). Robotics to develop computational thinking in early childhood education. Comunicar, 27(59), 63–72. https://doi.org/10.3916/C59-2019-06
Futschek G., & Moschitz J. (2011). Learning algorithmic thinking with tangible objects eases transition to computer programming. In: Kalaš I., Mittermeir R.T. (eds) Informatics in Schools. Contributing to 21st Century Education. ISSEP 2011. Lecture Notes in Computer Science, vol 7013. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-24722-4_14
Hudson, M., Baek, Y., Ching, Y.-H., & Rice, K. (2020). Using a multifaceted robotics-based intervention to increase student interest in STEM subjects and careers. Journal for STEM Education Research, 3, 295–316. https://doi.org/10.1007/s41979-020-00032-0
Hsiao, H.-S., Lin, Y.-W., Lin, K.-Y., Lin, C.-Y., Chen, J.-H., & Chen, J.-C. (2022). Using robot-based practices to develop an activity that incorporated the 6E model to improve elementary school students’ learning performances. Interactive Learning Environments, 30(1), 85–99. https://doi.org/10.1080/10494820.2019.1636090
Hsu, T. C., Chang, S. C., & Hung, Y. T. (2018). How to learn and how to teach computational thinking: Suggestions based on a review of the literature. Computers and Education, 126(June), 296–310. https://doi.org/10.1016/j.compedu.2018.07.004
Hsu Y.-C., Irie, N. R., & Ching, Y.-H. (2019). Computational thinking educational initiatives (CTEI) across the Globe. TechTrends, 63(3), 260–270. https://doi.org/10.1007/s11528-019-00384-4
Ioannou, A., & Makridou, E. (2018). Exploring the potentials of educational robotics in the development of computational thinking: A summary of current research and practical proposal for future work. Education and Information Technologies, 23(6), 2531–2544. https://doi.org/10.1007/s10639-018-9729-z
ISTE & CSTA (2011). Operational definition of computational thinking for K-12 education. Retrieved Oct. 30, 2020, from https://cdn.iste.org/www-root/ct-documents/computational-thinking-operational-definition-flyer.pdf?sfvrsn=2
Kandlhofer, M., & Steinbauer, G. (2016). Evaluating the impact of educational robotics on pupils’ technical- and social-skills and science related attitudes. Robotics and Autonomous Systems, 75, 679–685. https://doi.org/10.1016/j.robot.2015.09.007
Katai, Z. (2015). The challenge of promoting algorithmic thinking of both sciences- and humanities-oriented learners. Journal of Computer Assisted Learning, 31(4), 287–299. https://doi.org/10.1111/jcal.12070
*Kazakoff, E., & Bers, M. (2012). Programming in a robotics context in the kindergarten classroom: The impact on sequencing skills. Journal of Educational Multimedia and Hypermedia, 21(4), 371–391. https://www.learntechlib.org/primary/p/39512/
Kazakoff, E. R., & Bers, M. U. (2014). Put your robot in, put your robot out: Sequencing through programming robots in early childhood. Journal of Educational Computing Research, 50(4), 553–573. https://doi.org/10.2190/EC.50.4.f
Kopcha, T. J., Ocak, C., & Qian, Y. (2021). Analyzing children’s computational thinking through embodied interaction with technology: A multimodal perspective. Educational Technology Research and Development, 69(4), 1987–2012. https://doi.org/10.1007/s11423-020-09832-y
Lee, I., Martin, F., Denner, J., Coulter, B., Allan, W., Erickson, J., Malyn-Smith, J., & Werner, L. (2011). Computational thinking for youth in practice. ACM Inroads, 2(1), 32–37. https://doi.org/10.1145/1929887.1929902
Li, Y., Schoenfeld, A. H., diSessa, A. A., Graesser, A. C., Benson, L. C., English, L. D., & Duschl, R. A. (2020). Computational thinking is more about thinking than computing. Journal for STEM Education Research, 3(1), 1–18. https://doi.org/10.1007/s41979-020-00030-2
*Luo, F., Antonenko, P. D., & Davis, E. C. (2020). Exploring the evolution of two girls’ conceptions and practices in computational thinking in science. Computers & Education, 146, 103759. https://doi.org/10.1016/j.compedu.2019.103759
Lye, S. Y., & Koh, J. H. L. (2014). Review on teaching and learning of computational thinking through programming: What is next for K-12? Computers in Human Behaviour, 41, 51–61. https://doi.org/10.1016/j.chb.2014.09.012
Martín-Ramos, P., Lopes, M. J., da Silva, M. M. L., Gomes, P. E., da Silva, P. S. P., Domingues, J. P., & Silva, M. R. (2017). First exposure to Arduino through peer-coaching: Impact on students’ attitudes towards programming. Computers in Human Behavior, 76, 51–58. https://doi.org/10.1016/j.chb.2017.07.007
Merino-Armero, J. M., González-Calero, J. A., & Cózar-Gutiérrez, R. (2022). Computational thinking in K-12 education. An insight through meta-analysis. Journal of Research on Technology in Education, 54(3), 410–437. https://doi.org/10.1080/15391523.2020.1870250
Moore, T. J., Brophy, S. P., Tank, K. M., Lopez, R. D., Johnston, A. C., Hynes, M. M., & Gajdzik, E. (2020). Multiple representations in computational thinking tasks: A clinical study of second-grade students. Journal of Science Education and Technology, 29(1), 19–34. https://doi.org/10.1007/s10956-020-09812-0
Nam, K. W., Kim, H. J., & Lee, S. (2019). Connecting plans to action: The effects of a card-coded robotics curriculum and activities on Korean kindergartners. The Asia-Pacific Education Researcher, 28(5), 387–397. https://doi.org/10.1007/s40299-019-00438-4
National Research Council. (2010). Report of a workshop on the scope and nature of computational thinking. National Academies Press.
Newton, K. J., Leonard, J., Buss, A., Wright, C. G., & Barnes-Johnson, J. (2020). Informal STEM: Learning with robotics and game design in an urban context. Journal of Research on Technology in Education, 52(2), 129–147. https://doi.org/10.1080/15391523.2020.1713263
Noh, J., & Lee, J. (2020). Effects of robotics programming on the computational thinking and creativity of elementary school students. Educational Technology Research and Development, 68, 463–484. https://doi.org/10.1007/s11423-019-09708-w
Papert, S. (1980). Mindstorms: Children, computers, and powerful ideas. Basic Books.
Papert, S., & Harel, I. (1991). Situating Constructionism. Constructionism, 36(2), 1–11.
*Pugnali, A., Sullivan, A., & Umashi Bers, M. (2017). The impact of user interface on young children’s computational thinking. Journal of Information Technology Education: Innovations in Practice, 16, 171–193. https://doi.org/10.28945/3768
Rich, K. M., Andrew Binkowski, T., Strickland, C., & Franklin, D. (2019). A K-8 debugging learning trajectory derived from research literature. SIGCSE 2019 - Proceedings of the 50th ACM Technical Symposium on Computer Science Education, 745–751. https://doi.org/10.1145/3287324.3287396
Resnick, M., Maloney, J., Hernandez, A. M., Rusk, N., Eastmond, E., Brennan, K., et al. (2009). Scratch: Programming for all. Communications of the ACM, 52(11). Retrieved from http://web.media.mit.edu/~mres/papers/Scratch-CACM-final.pdf
Sáez-López, J.-M., Sevillano-García, M.-L., & Vazquez-Cano, E. (2019). The effect of programming on primary school students’ mathematical and scientific understanding: Educational use of mBot. Educational Technology Research and Development, 67, 1405–1425. https://doi.org/10.1007/s11423-019-09648-5
Shen, J., Chen, G., Barth-Cohen, L., Jiang, S., & Eltoukhy, M. (2022). Connecting computational thinking in everyday reasoning and programming for elementary school students. Journal of Research on Technology in Education, 54(2), 205–225. https://doi.org/10.1080/15391523.2020.1834474
Shute, V. J., Sun, C., & Asbell-Clarke, J. (2017). Demystifying computational thinking. Educational Research Review, 22, 142–158. https://doi.org/10.1016/j.edurev.2017.09.003
Skulmowski, A., & Rey, G. D. (2018). Embodied learning: Introducing a taxonomy based on bodily engagement and task integration. Cognitive Research: Principles and Implications, 3(1). https://doi.org/10.1186/s41235-018-0092-9
Taylor, K., & Baek, Y. (2019). Grouping matters in computational robotic activities. Computers in Human Behaviour, 93, 99–105. https://doi.org/10.1016/j.chb.2018.12.010
Tikva, C., & Tambouris, E. (2021). A systematic mapping study on teaching and learning Computational Thinking through programming in higher education. Thinking Skills and Creativity, 41(March), 100849. https://doi.org/10.1016/j.tsc.2021.100849
Wang, S., Ching, Y.-H., Swanson, S., Baek, Y., Yang, D., & Chittoori, B. C. S. (2020). Developing US elementary students’ STEM practices and concepts in an after school integrated STEM project. In J. Anderson & Y. Li (Eds.), Integrated Approaches to STEM Education: An International perspective (pp. 205–226). Springer. https://doi.org/10.1007/978-3-030-52229-2_12
Wellsby, M., & Pexman, P. M. (2014). The influence of bodily experience on children’s language processing. Topics in Cognitive Science, 6(3), 425–441. https://doi.org/10.1111/tops.12092
Wing, J. M. (2006). Computational thinking. Communications of the ACM, 49(3), 33–35.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ching, YH., Hsu, YC. Educational Robotics for Developing Computational Thinking in Young Learners: A Systematic Review. TechTrends 68, 423–434 (2024). https://doi.org/10.1007/s11528-023-00841-1
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11528-023-00841-1