
Abstract
In this paper, we study pumping cost minimization for any number and layout of wells under transient groundwater flow conditions in infinite confined aquifers and semi-infinite ones, to which the method of images applies. Moreover, we take into account additional steady-state flow, which is independent of the well system and results in non-horizontal initial hydraulic head level distribution. We prove analytically that, at any time, the instant pumping cost is minimum, when the following condition holds: the observed at that instant differences between hydraulic head values at the locations of the wells are equal to the half of the initial ones, which are due to the additional steady-state flow. Based on this proof, an analytical calculation procedure of the time-dependent optimal distribution of the required total flow rate to the individual wells is also presented. Moreover, as well flow rates usually remain constant over the pumping period, an approximate calculation of the optimal constant well flow rate distribution is outlined, based again on an analytical procedure.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Minimization of energy consumption, usually translated as pumping cost, is one of the most common problems in groundwater resources management. Simulation of groundwater flow is usually part of the optimization procedure and may determine the difficulty of the respective optimization problem (e.g. Ketabchi and Ataie-Ashtiani 2015; Moutsopoulos et al. 2017; Singh and Panda 2013; Sreekanth and Datta 2011). Moreover, there are often additional constraints to the optimization process, such as flow rate limits, due to pump capacities, or limits to hydraulic head drawdown in parts of the aquifer (e.g. Bayer et al. 2009). In other cases, pumping cost is examined together with other cost items, such as well or pipe network construction cost. Water quality considerations may also enter the optimization process (e.g. Mayer et al. 2002). In many cases, pumping cost is the main item in aquifer restoration problems (e.g. Kontos 2013; Matott et al. 2006). Moreover, optimal conjunctive management of surface and groundwater resources is often sought (e.g. Heydari et al. 2016; Mani et al. 2016). Parameter uncertainty may also increase the complexity of optimization problems (Sreekanth and Datta 2014).
Due to the importance of proper development of groundwater resources, many optimization methods (and combinations of them) have been used to tackle the respective problems (e.g. Bostan et al. 2016; Fowler et al. 2008; Khadem and Afshar 2015; Nicklow et al. 2010; Sidiropoulos and Tolikas 2008). On the other hand, some analytical solutions have led to more general results, which can serve as guidelines. Such results are outlined in the following paragraphs.
Katsifarakis (2008) studied steady flow in confined infinite aquifers, as well as in semi-infinite ones to which the method of images applies. He proved that the cost to pump a given total flow rate QT from any number and layout of wells is minimized, when hydraulic head levels at all wells are equal to each other, as long as flow is due to that system of wells only. Moreover, he presented an analytical calculation procedure of the optimal distribution of QT to the individual wells.
Katsifarakis and Tselepidou (2009) extended the aforementioned work to steady flows in aquifers with two zones of different transmissivities, to which the method of images applies. They proved that pumping cost is minimized, when hydraulic head levels at all wells are equal to each other, as long as flow is due to that system of wells only. Moreover, they outlined the analytical calculation of the optimal distribution of QT to the individual wells. Then they took into account regional flow, independent of the operation of the wells. They proved that in this general case, pumping cost is minimized, when final differences between hydraulic head values at the locations of the wells, resulting from superposition of the regional flow and the operation of the well system, are equal to the half of those, which are due to the regional flow only. They also presented an analytical calculation procedure of the optimal distribution of QT to the individual wells.
Ahlfeld and Laverty (2011), using a matrix formulation, have come up with similar results, even for non-infinite flow fields, if the groundwater flow equation is linear and boundary conditions are not head dependent. Their proof is based on the assumption that the response matrix of drawdown to pumping is symmetric. Its coefficients have to be calculated numerically, and symmetry of the numerical model coefficient matrix is a prerequisite. Moreover, their proof holds for transient flows with constant well flow rates, under the same assumptions. In a more recent paper, Ahlfeld and Laverty (2015) have tested their formulation on a hypothetical problem with complex hydrogeology and large drawdowns, which was developed from a field-scale problem in California.
Recently, there is a renewed interest in analytical solutions for groundwater flows. Saeedpanah and Golmohamadi Azar (2017), for instance, derived a new analytical expression for predicting the groundwater level and flow rate in a confined aquifer between two streams of varying water level boundaries and two constant head boundaries, while Bansal et al. (2016) investigated the influence of a thin clogging layer in aquifer-stream interaction.
In many cases, it is plausible to consider steady groundwater flow during parts of the examined period (Papadopoulou et al. 2007). Nevertheless, taking into account transient groundwater flow conditions is imperative in other applications of practical interest, e.g. when real-time management is sought (e.g. Bauser et al. 2012) or when variable power price has to be taken into account (Bauer-Gottwein et al. 2016). Our work is relevant to such cases. We study pumping cost minimization for any number and layout of wells under transient groundwater flow conditions in infinite confined aquifers and semi-infinite ones, to which the method of images applies. Moreover, we take into account additional steady state flow, which is independent of the well system and results in non-horizontal initial hydraulic head level distribution. We prove analytically that, at any time, the instant pumping cost is minimum, when the following condition holds: the observed at that instant differences between hydraulic head values at the locations of the wells are equal to the half of the initial ones, which are due to the additional steady-state flow. Based on this proof, an analytical calculation procedure of the time dependent optimal distribution of the required total flow rate QT to the individual wells is presented. Moreover, as well flow rates usually remain constant over the pumping period, an approximate calculation of the optimal constant flow rate distribution is outlined. To our knowledge, no such optimal analytical solutions exist for transient groundwater flows.
2 Formulation of the Optimization Problem
At any time, and for any aquifer type, pumping cost for a system of N wells can be defined as:
where QJ is the flow rate of well J, hJ is the distance between water level at well J and a predefined level (e.g. highest ground elevation) and Α is a constant, depending on energy cost. Treating A as constant implies that: a) pump efficiencies are considered as constants and equal to each other and b) Energy price does not change with time.
In the simplest case, the initial undisturbed hydraulic head level is horizontal, namely flow will be due to the studied system of wells only. Here, we consider a more general case, involving an additional regional flow, which is independent of the well system, remains constant and results in non-horizontal initial hydraulic head level. Then, Eq. (2.1) can be written as:
where sJ(t) is the time-dependent hydraulic head level drawdown (from then on simply drawdown) at well J at time t and δJ is the distance between the initial hydraulic head level at well J and the reference level, the choice of which should guarantee that no δJ value is negative. Constant A does not affect the optimization process, hence the objective function that should be minimized is:
The flow rates QJ are the decision variables, while the terms (sJ(t) + δJ) serve as coefficients. While δJ values can be considered as known constants, sJ(t) have to be calculated using the flow simulation model.
The decision variables, namely the well flow rates QJ, should fulfill the basic constraint of the problem, namely:
Moreover, in praxis, they should not obtain negative values, since such values correspond to recharge wells.
The problem will be solved first for infinite aquifers and then for semi-infinite ones, to which the method of images applies. Use of analytical solutions for the flow simulation model, allows analytical, namely more accurate solution of the optimization problem, at low overall computational load. Moreover, the possibility of superposition with additional steady-state flow, allows application to more complex cases. Finally, it should be kept in mind, that sophisticated models produce better results, only if they are supported by accurate and adequate field data, which are not always available.
3 Infinite Aquifers
3.1 The Combined Simulation-Optimization Model
Suppose that N wells start pumping at time t0 = 0 with constant flow rates from a confined infinite aquifer. For any time tk > 0, transient drawdown sJ(t) at a point J of the aquifer with respect to the initial horizontal hydraulic head level is given as (Theis 1935):
where
and
In Eqs. (3.1) to (3.3), T is the aquifer’s transmissivity, QI the flow rate of well I, γ the Euler’s constant, S the aquifer’s storativity and rIJ the distance between point J and well I. It is worth mentioning that W(uIJ) decreases with increasing uIJ (namely with increasing rIJ, for any given tk). The physical meaning is that the influence of pumping at well I on location J, decreases with the distance between I and J.
The superposition principle (e.g. Bear 1979) allows adding the result of pumping to that of the steady-state flow. Hence, for any tk, and as long as the flow remains confined at any point of the flow field, the respective objective function Kk of the cost minimization problem can be written as:
where rIJ is the distance between wells I and J (therefore rIJ = rJI). For I = J in particular, rIJ is equal to the radius of the well r0. The first and second terms of the right-hand side of (3.4) represent cost due to transient pumping and to additional steady-state flow, respectively.
To simplify notation, we use WIJk instead of \( W\left({Sr}_{IJ}^2/\left(4{Tt}_k\right)\right) \) in the rest of the paper (and W0k for I = J). Since rIJ = rJI, WIJk = WJIk, too.
3.2 Analytical Solution of the Optimization Problem
Following the approach developed by Katsifarakis (2008) and Katsifarakis and Tselepidou (2009) for steady-state flow problems, we shall calculate the first derivatives of Kk with respect to the decision variables, namely the flow rates QI. First, we note that they are not independent of each other, since they are subject to the constraint (2.4). We can assume, without loss of generality, that the first N-1 of them are independent, while QN depends upon the rest, namely
It follows that, for any M ∈ [1, N-1]
Then, for any M ∈[1, N-1]
where CJ is a coefficient, e.g. WIJk or δJ. Applying this result to the objective function Kk, we get, for any M∈[1, N-1]:
To derive (3.8), Eq. (3.1) and the equality WIJk = WJIk have been used. Setting the derivative of Kk equal to zero, we get:
Equation (3.9) holds for every M ∈ [1, N-1]. It follows, then, that (for any given tk) a critical point of the objective function Kk occurs, when the following condition holds: the differences between hydraulic head values at the locations of the wells, which result from the superposition of transient operation of the wells and the steady-state flow, are equal to the half of the initial ones, which are due to the steady-state flow only.
The coordinates of the critical point, namely the corresponding set of QM values, can be found by solving a linear system of N equations and N unknowns. The first N-1 equations have the following form:
Equation (3.10) is another form of (3.9), namely it results from (3.8) setting the derivative of Kk equal to zero, and it can be written for every M ∈ [1, N-1]. The N-th equation, which completes the system, is the constraint (2.4), namely:
The aforementioned linear system has one solution only, namely only one critical point P exists. To verify that P corresponds to the minimum of Kk, the respective second derivatives will be used. Starting from Eq. (3.8) and using Eq. (3.7) one gets, for any M ∈[1, N-1]:
The parenthesis of the right-hand side of Eq. (3.11) is positive, for the following reason: As mentioned in section 3, WIJ decreases with increasing distance between wells. But W0k corresponds to r0, namely to the radius of each well, which is smaller than any distance rMN between wells. Then, the value of the second derivative of Kk with respect to QM is positive, for every M ∈ [1, N-1]. This means that the critical point P corresponds to a minimum or to a saddle point.
Moreover, it is easily proved that all second derivatives of Kk with respect to well flow rates are constant. Then, according to the reasoning developed by Katsifarakis (2008) for steady-state flows, P is a minimum of Kk; and since it is the only critical point, P is the absolute minimum.
Finally, it should be mentioned that, as discussed in Katsifarakis and Tselepidou (2009) for steady-state flows and in Ahlfeld and Laverty (2015), solution of the aforementioned linear system may result in negative (namely recharge) flow rates for some of the wells, which have the largest δI values, at least for certain tk values. In praxis, wells should not be used as long as the respective QI values are negative, and QT should be redistributed to the rest of the wells. This point is further discussed in the second example of section 6.
4 Semi-Infinite Aquifers
In the following paragraphs, we study the pumping cost minimization problem, described by Eqs. (2.1) to (2.3), in semi-infinite aquifers, to which the method of images applies. We take into account flow fields with a rectilinear impermeable boundary or with a rectilinear constant head boundary. The optimization procedure remains the same, but the flow simulation model is different for each case.
The method of images (e.g. Bear 1979), provides analytical solutions for fields with one (or more, under certain conditions) straight-line boundaries. Its basic concept is that a boundary can be “removed” by adding a number of fictitious (or image) wells, symmetrical of the real ones with respect to it. The relationship between the flow rate of each real well and that of its image depends on the boundary condition along the “removed” boundary and guarantees its observance. Application of the method of images to a flow field with one rectilinear boundary is shown in Fig. 1, where real and image wells are denoted with capital and lower case letters, respectively.

Real and fictitious wells in a semi-infinite aquifer with one straight-line boundary
4.1 Flow Fields with a Straight-Line Impermeable Boundary
First, we study a system of N wells, which start pumping at time t0 = 0 with constant flow rates from a confined semi-infinite aquifer, bounded by a rectilinear impermeable boundary. At any time tk > 0, transient drawdown sJ(t) at a point J of the aquifer with respect to the initial horizontal hydraulic head level is given as:
Equation (4.1) should be introduced to Eq. (2.3) to derive the objective function. Invoking the superposition principle and the notation used in section 3, and assuming that the flow remains confined at any point of the flow field, the objective function Kk obtains the following form:
In Eq. (4.2), we have used WiJk instead of \( W\left({Sr}_{iJ}^2/\left(4{Tt}_k\right)\right) \), in addition to the notation, which has been already introduced in section 3.
Equations (3.5) to (3.7) hold in this case too, since they do not depend on the flow simulation model. Then, for any M∈[1, N-1], the derivative of the objective function Kk reads:
Setting the derivative of Kk equal to zero, we get, as in the infinite aquifer case:
Since Eq. (4.4) holds for every M ∈ [1, N-1], a critical point of the objective function Kk occurs, when the following condition holds: the differences between hydraulic head values at the locations of the wells, which result from the superposition of transient operation of the wells and the steady-state flow, are equal to the half of the initial ones, which are due to the steady-state flow only.
The coordinates of the critical point, namely the corresponding set of QM values, can be found by solving a linear system of N equations and N unknowns. The first N-1 equations have the following form:
Equation (4.5) is a more explicit form of Eq. (4.4). The N-th equation, which completes the system, is the constraint (2.4). The linear system has one solution only, namely only one critical point P exists. To verify that P corresponds to the minimum of Kk, the respective second derivatives will be used. Starting from Eq. (4.3) one gets, for any M ∈[1, N-1]:
To prove that the term inside the brackets is positive, we rewrite it in the following way:
In the right-hand side of Eq. (4.7), the first parenthesis has larger value than the second, for the following reason: If they are multiplied by Q M /(4πT), the first parenthesis will be equal to the drawdown at the well M, while the second at the point N, when only QM is pumped. Similarly, if the values of the third and fourth parentheses are multiplied by Q N /(4πT), they will be equal to the drawdown at the well N and at the point M, respectively, when only QN is pumped. Therefore, the value of the third parenthesis is larger than that of the fourth. It follows, then, that the right-hand side of Eq. (4.7) and the second derivative of Kk are positive. Another proof, based on the definition of W(u), is given in appendix A.
The rest of the proof, regarding the nature of critical point P, is exactly the same as the one outlined for the infinite aquifer case.
4.2 Flow Fields with a Rectilinear Constant Head Boundary
In this section, we study a similar system of N wells, which start pumping at time t0 = 0 with constant flow rates from a confined semi-infinite aquifer, bounded by a rectilinear constant head boundary. At any time tk > 0, sJ(t) at a point J of the aquifer with respect to the initial horizontal hydraulic head level is given as:
Then, the objective function Kk of the pumping cost minimization problem, which results from introducing Eqs. (4.8) to (2.3), reads:
Invoking again Eqs. (3.5) to (3.7), we get, for any M∈[1, N-1]:
Setting the derivative of Kk equal to zero, we get, as in section 4.1:
Equation (4.11) is exactly the same with Eq. (4.4). Therefore, it leads to the same conclusions, regarding the existence and the properties of the critical point P of Kk. The coordinates of P, namely the corresponding set of QM values, can be found by solving a linear system of N equations and N unknowns. The first N-1 equations have the following form:
The N-th equation, which completes the system, is the constraint (2.4). The linear system has one solution only, namely only one critical point P exists. To verify that P corresponds to the minimum of Kk, we shall check the respective second derivatives. Starting from Eq. (4.10), and after proper term rearrangement, we get, for any M ∈[1, N-1]:
As explained for the respective terms of Eq. (4.7), the first term of the right hand side of Eq. (4.13) is larger than the second, and the third larger than the fourth. Therefore, the second derivative of Kk is positive. The rest of the proof, regarding the nature of critical point P, is exactly the same as the one outlined for the infinite aquifer case.
5 Optimal Constant well Flow Rates Over the Pumping Period
Changing well flow rates continuously, or even every few minutes, is practically infeasible. It is quite useful then to come up with an approximate calculation of the optimal well flow rate distribution, given that it will not change during the pumping period TP. To achieve this, TP is divided in T1 equal intervals and the objective function KC is written as:
Rearranging terms in Eq. 5.1, we get:
The average value WIJav of WIJk over the pumping period can be approximated as:
Taking into account Eq. (5.3), Eq. (5.2) can be written as follows:
It follows from Eq. (5.4) that KC has the same decision variables and the same form as any Kk. Moreover, WIJav have the same properties as WIJk, namely they decrease with rIJ and WIJav = WJIav. Then, KC behaves as any Kk, namely its minimum occurs when, for every J ∈ [1, N-1], the following equation holds:
where
As mentioned above, the calculation of the optimum is approximate. Its accuracy improves with that of WIJav, depending on the value of T1, as in the case of calculating integrals using the Simpson rule. The optimal well flow rate distribution is calculated by solving the respective linear system of N equations and N unknowns, as in section 3.
6 Illustrative Examples
The aforementioned analytical procedure allows calculation of the optimal distribution of QT to N wells for any tk > 0. Change of this distribution with time is discussed in the first of the following examples. Moreover, the influence of different initial hydraulic head levels δI is investigated in the second example.
Example 1
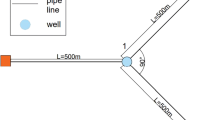
A total flow rate QT = 200 lit/s will be pumped by 8 wells, from an infinite confined aquifer, with transmissivity and storativity equal to T = 0.002 m2/s and S = 0.001, respectively. Pumping will start at t = 0 and it will last for 18 h. The initial hydraulic head level is horizontal, namely there is no additional steady-state flow. The layout of the wells is shown in Fig. 2, while their coordinates xI, yI appear in the first line of Table 1. The radius of each well is r0 = 0.2 m.

Well layout of the illustrative examples
We are going to calculate the optimal well flow rate distribution for tk = 1, 2, 4, 6, 8, 10, 12, 14, 16 and 18 h after the beginning of pumping. For each tk, a system of 8 equations with 8 unknowns is solved. In all cases the constant terms of the Eqs. 1 to 7 are equal to zero, since the initial hydraulic head level is horizontal, namely all δI are equal to each other. For the 8th equation, the constant term is equal to QT, namely to 200, while the coefficients of the unknowns are equal to 1. All other coefficients depend on tk.
Results are summarized in Table 1. For each tk, optimal well flow rates are presented, together with the respective sI values, which are equal to each other, as expected.
It can be seen that for tk = 3600 s the well flow rates are almost equal to each other, since the interaction between wells is minimal. As time goes by, the transient optimal well flow rate distribution generally evolves towards that of the steady-state flow, shown also in Table 1 and calculated according to Katsifarakis (2008). For t = 64,800 s, the ratio of the largest to the smallest well flow rate Q3/Q6 exceeds 1.43 already, while for the steady-state flow it reaches 1.66.
It is interesting to study the evolution of drawdown at the wells, if the distributions of flow rates, given in Table 1 as optimal for particular tk values, remain constant during the pumping period. This evolution is shown in Fig. 3.

Moreover, it is interesting to compare the sI and Kk values, shown in Table 1, which correspond to instant optimal flow rate distributions, with those of the optimal constant flow rate distribution. The latter are shown in Table 2. The evolution of drawdowns at the wells is shown in Fig. 3d. Comparison reveals that constant flow rate distribution is very similar to the transient one for tk = 28,800 s, namely for t close to, but smaller than Tp/2. This is due to the form of all WIJ(t), which increase with t at a diminishing rate.
Kk values for the constant distribution are larger than those of the respective instant optimal distributions, as expected. The differences are smaller than 0.5%, though, allowing us to recommend use of the optimal constant well flow rate distribution for practical purposes.
Example 2
A total flow rate QT = 200 lit/s will be pumped for 18 h by 8 wells (with r0 = 0.2 m), from an infinite confined aquifer, with transmissivity and storativity equal to T = 0.0004 m2/s and S = 0.001, respectively. Pumping will start at t = 0 and it will last for 18 h. The layout of the wells is shown in Fig. 2, namely their coordinates are the same as the ones of example 1. One additional well, Ws, located at (60, 60), pumps continuously 30.0 l/s. This steady-state pumping results in different δI values at the locations of the 8 wells, which are given in the first line of Table 3.
We are going to calculate the optimal well flow rate distribution for tk = 0.5, 1, 2, 4, 6, 8, 10, 12 and 18 h after the beginning of pumping. It turns out that, for tk = 0.5 h, Q4 is negative, while it is slightly larger than zero, for tk = 1 h. The conclusion is that the well 4 should start pumping one hour later than the other 7 wells. Results are summarized in Table 3. For tk = 0.5 and 1 h, both the initial and the corrected flow rate distribution appear. For tk > 1 h, delayed start of pumping at well 4 is taken into account.
For tk = 1800 s, Kk is smaller for the initial distribution than for the corrected one. This result is due to the calculation procedure, where negative flow rates result in “cost” reduction. In this case, the solution of the mathematical problem does not correspond to the solution of the physical one. If only we set the respective cost coefficient to 0, the term:
will be added to the Kk value of the initial distribution, rendering it definitely larger.
Based on this application example, the following procedure is recommended, when differences between δΙ values are substantial:
-
a)
Check the optimal flow rate distribution for the end of the pumping period (in our example for tk = 64,800 s). If there are flow rates with negative signs, the respective wells should not be used at all.
-
b)
Check the optimal flow rate distribution to the system of the remaining wells for different tk, starting with short values (in our example we have started with tk = 1800 s). Exclude the wells with negative flow rates, for the period that remain negative. In our example, we have excluded well 4 for the first hour, as mentioned in the previous paragraphs.
7 Conclusions
In this paper, we have studied pumping cost minimization for any number and layout of wells under transient groundwater flow conditions in infinite confined aquifers and semi-infinite ones, to which the method of images applies. Moreover, we have taken into account additional steady-state flow, which is independent of the well system and results in non-horizontal initial hydraulic head level distribution. We have proved analytically that at any time, the instant pumping cost Kk is minimum, when the following condition holds: the observed at that instant differences between hydraulic head values at the locations of the wells are equal to the half of the initial ones, which are due to the additional steady-state flow. Moreover, we have presented the methodology of finding the time dependent optimal well flow rate distribution, by solving a linear system of N equations and N unknowns, N being the number of the pumping wells. In addition, we have discussed handling of negative flow rates that might appear when additional steady-state flow might overlap with the transient operation of the system of wells.
The aforementioned theoretical results have restricted practical importance, since it is infeasible to change well flow rates continuously, or even every few minutes. For this reason, we have presented an approximate calculation of the optimal well flow rate distribution, given that it will remain constant over the pumping period TP. This distribution can be also calculated by solving a linear system of N equations and N unknowns, and can be used in many cases of practical interest.
Finally, we mention that analytical calculation of the optimal solutions, which in principle holds for any number of wells, is not computationally intensive. It is restricted only by the maximum number (N) of linear equations, or the matrix dimensions (N x N) that can be handled by the available computer.
References
Ahlfeld DP, Laverty MM (2011) Analytical solutions for minimization of energy use for groundwater pumping. Water Resour Res 47(6). https://doi.org/10.1029/2010WR009752
Ahlfeld DP, Laverty MM (2015) Field scale minimization of energy use for groundwater pumping. J Hydrol 525:489–495
Bansal RK, Lande CK, Warke A (2016) Unsteady groundwater flow over sloping beds: analytical quantification of stream–aquifer interaction in presence of thin vertical clogging layer. J Hydrol Eng 21(7). https://doi.org/10.1061/(ASCE)HE.1943-5584.0001362
Bauer-Gottwein P, Schneider R, Davidsen C (2016) Optimizing wellfield operation in a variable power price regime. Groundwater 54(1):92–103
Bauser G, Franssen H-JH, Stauffer F, Kaiser H-P, Kuhlmann U, Kinzelbach W (2012) A comparison study of two different control criteria for the real-time management of urban groundwater works. J Environ Manag 105:21–29
Bayer P, Duran E, Baumann R, Finkel M (2009) Optimized groundwater drawdown in a subsiding urban mining area. J Hydrol 365(1-2):95–104
Bear J (1979) Hydraulics of Groundwater. McGraw-Hill, New York
Bostan M, Afshar MH, Khadem M, Akhtari AA (2016) A hybrid MILP-LP-LP approach for the optimal design and operation of unconfined groundwater utilization systems. J Water Supply Res Technol AQUA 65(3):208–219
Fowler KP, Reese JP, Kees CE, Dennis JE Jr, Kelley CT, Miller CT, Audet C, Booker AJ, Couture G, Darwin RW, Farthing MW, Finkel DE, Gablonsky JM, Gray G, Kolda TG (2008) Comparison of derivative-free optimization methods for groundwater supply and hydraulic capture community problems. Adv Water Resour 31(5):743–757
Heydari F, Saghafian B, Delavar M (2016) Coupled quantity-quality simulation-optimization model for conjunctive surface-groundwater use. Water Resour Manag 30(12):4381–4397
Katsifarakis KL (2008) Groundwater pumping cost minimization-An analytical approach. Water Resour Manag 22(8):1089–1099
Katsifarakis KL, Tselepidou K (2009) Pumping cost minimization in aquifers with regional flow and two zones of different transmissivities. J Hydrol 377(1-2):106–111
Ketabchi H, Ataie-Ashtiani B (2015) Review: coastal groundwater optimization-advances, challenges, and practical solutions. Hydrogeol J 23(6):1129–1154
Khadem M, Afshar MH (2015) A Hybridized GA with LP-LP model for the management of confined groundwater. Groundwater 53(3):485–492
Kontos YN (2013) Optimal Management of Fractured Coastal Aquifers with Pollution Problems. PhD Thesis, Aristotle Univ. of Thessaloniki, Greece (in Greek)
Mani A, Tsai FT, Kao S-C, Naz BS, Ashfaq M, Rastogi D (2016) Conjunctive management of surface and groundwater resources under projected future climate change scenarios. J Hydrol 540:397–411
Matott SL, Rabideau AJ, Craig JR (2006) Pump-and-treat optimization using analytic element flow models. Adv Water Resour 29(5):760–775
Mayer AS, Kelley CT, Miller CT (2002) Optimal design for problems involving flow and transport phenomena in subsurface systems. Adv Water Resour 25:1233–1256
Moutsopoulos KN, Papaspyros JNE, Tsihrintzis VA (2017) Management of groundwater resources using surface pumps: optimization using genetic algorithms and the Tabu Search method. KSCE J Civ Eng 21(7):2968–2976
Nicklow J, Reed P, Savic D, Dessalegne T, Harrell L, Chan-Hilton A, Karamouz M, Minsker B, Ostfeld A, Singh A, Zechman E (2010) State of the art for genetic algorithms and beyond in Water Resources Planning and Management. J Water Resour Plan Manag-ASCE 136(4):412–432
Papadopoulou MP, Pinder GF, Karatzas GP (2007) Flexible time-varying optimization methodology for the solution of groundwater management problems. Eur J Oper Res 180(2):770–785
Saeedpanah I, Golmohamadi Azar R (2017) New analytical expressions for two-dimensional aquifer adjoining with streams of varying water level. Water Resour Manag 31(1):403–424
Sidiropoulos E, Tolikas P (2008) Genetic algorithms and cellular automata in aquifer management. Appl Math Model 32(4):617–640
Singh A, Panda SN (2013) Optimization and simulation modelling for managing the problems of water resources. Water Resour Manag 27(9):3421–3431
Sreekanth J, Datta B (2011) Coupled simulation-optimization model for coastal aquifer management using genetic programming-based ensemble surrogate models and multiple-realization optimization. Water Resour Res 47(4). https://doi.org/10.1029/2010WR009683
Sreekanth J, Datta B (2014) Stochastic and robust multi-objective optimal management of pumping from coastal aquifers under parameter uncertainty. Water Resour Manag 28(7):2005–2019
Theis CV (1935) The relation between lowering of the piezometric surface and the rate and duration of discharge of a well using ground water storage. Trans. Am. Geophys. Un., 16th Annual meeting 519–524
Acknowledgements
The authors would like to thank Professor Hara Charalambous, Department of Mathematics, Aristotle University of Thessaloniki, for checking part of the calculations.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Appendix
Appendix
Sign of the 2nd derivative of K k for semi-infinite fields with one impermeable boundary.
The second derivative of Kk with respect to QM is given as:
We know that W(u) is decreasing with u at a diminishing rate. Therefore, W0k is larger than any WMNk, since r0 is smaller than any rMN. Then, in order to prove that the second derivative of Kk with respect to QM is positive, it is enough to show that:
In the rest of the proof we drop index k, to simplify the notation.
If rmM and rnM are given, rMn = rmN obtains its smallest value when M and N are on the same perpendicular to the boundary, namely when the isosceles trapezoid MNnm (see Fig. 1) is reduced to a line segment. In this case, the following relationships hold:
Invoking Eq. (3.2), namely the definition of W(u), we have:
Introducing Eqs. (A3) and (A4) to (A1) we get:
Suppose that rnN, and therefore unN, is given, and consider the function F(rMN), defined as:
While unN is given, the values umN and umM depend on rMN. Moreover,
Therefore, according to the Leibniz rule and some trivial calculations:
Therefore, F(rMN) increases with rMN. For rMN = 0, it follows from Eq. (A6) that F(rMN) = 0. Hence F(rMN) > 0, for any positive rMN value. This proves that the second derivative of Kk with respect to QM is positive.
Rights and permissions
About this article

Cite this article
Katsifarakis, K.L., Nikoletos, I.A. & Stavridis, C. Minimization of Transient Groundwater Pumping Cost - Analytical and Practical Solutions. Water Resour Manage 32, 1053–1069 (2018). https://doi.org/10.1007/s11269-017-1854-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11269-017-1854-8