
Abstract
The article presents asymptotic modeling of the running-in wear process with fixed contact zone under a prescribed constant normal load or an imposed contact displacement. The wear contact problem is formulated within the framework of the two-dimensional theory of elasticity in conjunction with Archard’s law of wear. The running-in process is considered at the macro-scale level, while the micro-processes associated with roughness changes, tribomaterial evolution, and microstructural alteration in the subsurface layers as a first approximation are neglected. The setting of the steady-state regime for the macro-contact pressure evolution is chosen as the criterion to characterize the completion of running-in. Simple closed-form approximations are derived for the running-in period and running-in sliding distance. The obtained results can be used for estimating the running-in period in wear processes where the evolution of the macro-shape deviations at the contact interface plays a dominant role.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
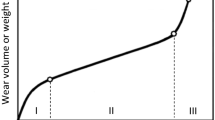
It is known that wear testing is a relatively time-consuming process, since the tribotests should be repeated several times for different normal loads. Moreover, in order to obtain correct values for the wear coefficient entering Archard’s law of wear, the steady-state wear conditions in tribotests must be achieved, thus ignoring the initial period, which is called the running-in period. At the same time, it may be difficult to judge correctly whether a steady-state wear regime has actually been attained [1, 2]. Owing to the variety of physical, mechanical, and chemical processes that evolve simultaneously in the subsurface layers of contacting solids in friction as well as the complexity to describe them analytically, the underlying mechanisms of the running-in process remain obscure so far and aspects of predicting the running-in period are still under research [3, 4]. This implies that the problem of predicting the running-in period represents a challenging scientific and practical concern.
Running-in is one of the well-known examples of time-dependent behavior in dry or lubricated sliding tribosystems [5, 6]. Depending on loading conditions, operational conditions and material properties of contacting solids, various tribological processes (including acoustic emission accompanying the friction process [7] and wear debris generation [8]) can exhibit different time-dependent behavior and, in particular, steady long-time periodic oscillations of one or another tribological parameter. The long-period oscillations of relaxation type appearing in the wear process of metals under heavy duty sliding conditions were recently mathematically modeled in [9] with the aim of application to structural health monitoring of tribosystems.
Phenomenological mathematical models of the running-in process and its transition to the steady-state wear regime were developed in [4, 10]. Such phenomenological models employ empirical relations for the running-in wear rate, running-in period and steady-state wear rate as functions of normal load, and they require determining the best-fit fitting parameters for the model equations using the experimental wear date.
Analytical approach for wear contact problems with fixed contact area was developed by Galin [11], and lately extended in a number of publications [12, 13]. Applying an optimal control approach [14] recently developed to study the asymptotic behavior of elasto-viscoplastic structures, Peigney [15] has solved the problem of determining the asymptotic state reached by an elastic half-plane subjected to wear and submitted to a normal and tangential loading by a cyclically moving rigid indenter with the prescribed vertical displacement.
In this article, we employ asymptotic modeling approach for modeling the running-in wear process governed by Archard’s law in the two-dimensional wear contact problem with fixed contact zone under a prescribed constant normal load or an imposed contact displacement. Analytical approximations for the running-in period and running-in sliding distance are obtained in a very simple closed form.
2 Sliding Wear Contact Problem with Prescribed Vertical Displacement
We consider the two-dimensional sliding contact problem for a wearable rigid punch moving along the surface of an elastic layer of relatively large thickness (see Fig. 1). In the case of fixed contact zone, the wear contact problem for determining the variable contact pressure p(x, t) can be reduced to the following integral equation [16]:

Schematic representation of two-dimensional contact
Here, H is the thickness of the elastic layer, a is the half-width of the contact zone, E and ν are Young’s modulus and Poisson’s ratio of the elastic layer, k is the dimensional wear coefficient in Archard’s wear law [17]; δ 0(t) is the vertical contact displacement of the punch, the function \( \Updelta (x) \) describes the macro-shape of the punch, v is the sliding speed of the punch, d 0 is an asymptotic constant given by the following formulas (see for e.g., [18]) with κ = 3 − 4ν being Kolosov’s constant for plain strain:
Note that the asymptotic constant d 0 is determined from the singular solution of the two-dimensional elastic problem for an elastic strip loaded by a point force. In the case of the elastic strip firmly attached to a rigid base, the value of d 0 depends on Poisson’s ratio ν (see Fig. 2). In particular, for ν = 0.3, we have d 0 ≈ 0.527. In the case, when the elastic strip is in frictionless contact with the rigid base, d 0 ≈ 0.352 [16].

Asymptotic constant d 0 as function of ν
Introducing the notation
we rewrite Eq. 1 as follows:
Following Aleksandrov et al. [16], we consider the sliding contact problem (2) under the assumption of the prescribed constant vertical displacement, i.e., δ 0(t) = δ 0, where δ 0 is a constant. The solution of Eq. 2 can be represented in the form
where the eigenvalues α 2r and eigenfunctions \( \varphi_{2r} \left( {x^{\prime} } \right) \) are determined as solutions of the homogeneous integral equation
where x′ and ξ′ are dimensionless variables, x′, ξ′ ∈ (−1, 1).
If the function \( \Updelta (x) \) is even, then restricting ourselves to the first term in the expansion (3), we get
where the coefficient c 2 is determined from the initial condition at t = 0. Formula (5) becomes more accurate as the time t increases. It is clear that formula (5) shows that the pressure distribution tends toward zero.
Remark 1
Let us discuss the tribological meaning of the exponent in Eq. 5. From the viewpoint of the approach used in [9], the negative value of the exponent’s argument determines a relaxation process for the contact pressures under the punch’s base. According to the notation used in Eq. 2, we have
Since both sides of the equality above are dimensionless as well as the eigenvalue α 2, the dimensional quantity \( T_{\user1{c}} = \vartheta a/(kv) \) turns out to represent a characteristic time of the tribological system under consideration. It should be emphasized that the characteristic time T c depends not only on the material characteristics ϑ and k, but also on a characteristic size of the contact zone, a, and the sliding speed of the punch v, which is an operational characteristic of the tribological system.
Remark 2
According to Archard’s wear law, the linear wear rate is given by
where w is the linear wear defined as the ratio of the worn volume to the contact area. In view of Eq. 5, in the case of the wear contact problem with prescribed displacement, the linear wear rate will be exponentially decaying function. Figure 3 shows the behavior of the normalized dimensionless relative wear rate with the increasing relative time for different values of the eigenvalue α 2. Observe that the initial wear rate is determined by the normal contact load P that, in turn, is determined by the value of the vertical displacement δ 0. In particular, for a flat-ended indenter, the contact load P is related to the displacement δ 0 by the following equation [16]:
Thus, the experimental data for different values of the relative layer thickness H/a should be compared after the normalization as it is shown in Fig. 3.

Wear rate variation with time in the wear contact problem with prescribed displacement
3 Sliding Wear Contact Problem with Prescribed Normal Load
Following Komogortsev [13], we consider the sliding contact problem (2) under the assumption of prescribed normal load P. We note the misprints in article [13] due to the assumption a = 1 made in the intermediate calculations.
In this case, the following equilibrium equation takes place:
Setting t = 0 in Eq. 2 and subtracting the equation obtained from (2), we will have
Eliminating the unknown right-hand side from (7) by integrating over the contact zone (see [13] for the complete detail), we arrive at the equation
The solution of Eq. 8 can be represented as follows:
where it is assumed that
Following [13], we represent the function q(x, t) by the series
where the eigenvalues λ m and eigenfunctions φ m (x′) are determined as solutions of the homogeneous integral equation
where x′ and ξ′ are dimensionless variables, x′, ξ′ ∈ (−1, 1). Note that when the function φ m (x′) satisfies the integral equation (12), the following condition [see (10)] is automatically satisfied:
Following form (9), the coefficients c m of series (11) are found from the initial condition
as follows:
It is assumed that the eigenfunctions φ m (x′) satisfy the normalization condition
Substituting the expressions (9) and (11) into the left-hand side of Eq. 7, we derive
where the following notation was introduced
Restricting ourselves to the first terms in the expansions (11) and (17), we get
where the coefficients c 1 and C 1 are determined by formulas (15) and (18).
Formulas (19) and (20) become more accurate as the time t increases. We emphasize that the asymptotic formulas (19) and (20) differ from the approximations derived in [13]. In fact, the results obtained by Komogortsev [13] follow from formulas (19) and (20) by substituting the approximation for φ 1(x′) obtained by Galerkin’s method in terms of the Chebyshev polynomials of the first kind. It is interesting that the eigenvalues λ m do not depend on the elastic layer’s thickness. Aleksandrov et al. [16] obtained that λ 1 ≈ 1.0996.
4 Approximation for the Running-In Period
Formula (19) shows that the pressure distribution tends toward uniform. Rewriting formula (19) in the form
we can estimate the factor 2ac 1/P in (21) by applying Schwarz’s inequality as follows:
Substituting, for e.g., the Hertz distribution \( p\left( {x,0} \right) = (2P/\pi a)\sqrt {1 - x^{2} /a^{2} } \) into the first integral (22) and taking into account the normalization condition (16), we obtain the estimate \( 2ac_{1} /P \le \sqrt {1 + 4/(3\pi^{2} )} \approx 1.065 \).
Let for \( t = T_{\text{in}} \), the second term in the braces in (21) is less than 1% in the L 2-norm sense. Then, taking into account the estimate (22), we obtain the approximation
where λ 1 ≈ 1.0996.
The main conclusion that can be drawn from formula (23) is that the running-in time, \( T_{\text{in}} \), does not depend on the load level.
We can express the running-in time in terms of the running-in sliding distance \( L_{\text{in}} = vT_{\text{in}} \). From (23), it follows that
In the case of an imposed contact displacement, according to (5), we arrive at the following approximations:
Here, the eigenvalue α 2 is given by Table 1. It should be noted that α 2 depends on the relative size of the contact region.
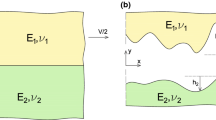
In the case of two elastic solids in contact, following the standard procedure in contact mechanics [19], we can generalize formulas (23–25) by setting
where E 1, E 2 and ν 1, ν 2 are elastic characteristics of the contacting solids.
It should be emphasized that formulas (23–25) are derived from the asymptotic solution of the sliding wear contact problem with fixed contact zone. In the case of increasing contact zone, formulas (23–25) with a standing for the initial half-width of contact should provide the lower bounds for the running-in time and the number of running-in cycles.
5 Discussion
First of all, it is interesting to observe that in accordance with Eqs. 23 and 25, the running-in period under an imposed contact displacement is about five times greater than that under a prescribed constant normal load. In fact, the ratio λ 1/α 2 ranges from 4.6 (for H/a = 6) to 5.7 (for H/a = 10). At that, Eq. 25 implies that the running-in period under an imposed contact displacement depends on the relative layer’s thickness H/a (increasing with its increase). This circumstance was overlooked in [16], and, to the best of the authors’ knowledge, was not subjected to experimental verification.
In the case of a prescribed constant normal load, the experimental setup employing the moving pin with a spiral wear track can be adopted from [2], where a test methodology was proposed for transient wear tests. The case of an imposed contact displacement requires a specific approach, because the displacement δ 0 should be imposed quasistatically. In the latter case, a general solution constructed in [16] for displacements linearly varying with time can be used in developing the corresponding test methodology for verifying the analytical formulas (25). It should be underlined that though two-dimensional wear contact problems are considered in the present study, the obtained results can be applied for the experimental verification in three-dimensional tests. Indeed, as it follows from the dimensional analysis, formulas (23–25) will hold true also in three-dimensional wear contact problems with the only difference that λ 1 and α 2 are eigenvalues of the corresponding eigenvalue problems for the integral operator of three-dimensional contact problems.
It should be underlined that the mathematical model based on the integral equation (1) is developed at the macro-scale level. This means that the tribological processes at the micro-scale level associated with roughness changes, tribomaterial evolution, and microstructural alteration in the subsurface layers as a first approximation are neglected in the final results represented by (23)–(25).
Finally, the exponential behavior observed in Eqs. 5, 19, and 21 agrees with the phenomenological mathematical models of wear evolution presented in [2, 4, 20]. The problem of wear evolution in the running-in period is very complicated for mathematical modeling, if the tribological processes at the micro-scale level should be taken into account. The phenomenological mathematical models used in [2, 4] are based on a range of experimental results for specific types of materials, but they provide little information about the mechanisms of wear. On the contrary, the presented mathematical model and analytical approximations are derived from first principles of elasticity theory in the framework of Archard’s law.
6 Conclusion
A mathematical model has been developed to estimate the running-in period in the two-dimensional wear contact problem with fixed contact zone in the framework of Archard’s law under a prescribed constant normal load or an imposed contact displacement. The exponents in Eqs.5, 19, 21 can be explained from the expected tribological behavior [4, 21]. The inverse proportionality of the characteristics of running-in period (23–25) to the wear coefficient agrees with the experimentally observed behavior [2]. Formula (23) for estimating the running-in period at the macro-scale level constitutes the main result of this study.
Abbreviations
- a :
-
Half-width of the contact zone
- C :
-
Asymptotic constant depending on the ratio H/a
- c2r , c2r+1:
-
Integration constants
- c m , C m :
-
Integration constants
- d 0 :
-
Asymptotic constant
- E :
-
Young’s elastic modulus
- H :
-
Thickness of the elastic layer
- k :
-
Dimensional wear coefficient in Archard’s wear law
- \( L_{\text{in}} \) :
-
Running-in sliding distance
- P :
-
Line normal load in 2D contact problem
- p(x, t):
-
Contact pressure
- q(x, t):
-
Residual contact pressure
- t :
-
Time variable
- T c :
-
Characteristic time of the tribological system
- \( T_{\text{in}} \) :
-
Running-in time period
- v :
-
Sliding speed of the punch
- x :
-
Transverse coordinate in 2D contact problem
- x′:
-
Dimensionless transverse coordinate
- w :
-
Linear wear
- α 2r :
-
Eigenvalues of integral equation (4)
- β :
-
Auxiliary parameter, β = kv/ϑ
- δ0(t):
-
Variable vertical contact displacement of the punch
- δ 0 :
-
Constant vertical contact displacement of the punch
- \( \Updelta (x) \) :
-
Macro-shape function of the punch
- ϑ :
-
Elastic constant, ϑ = 2(1 − ν 2)/(πE)
- κ = 3 − 4ν:
-
Kolosov’s constant for plain strain
- \( \nu \) :
-
Poisson’s ratio
- λ m :
-
Eigenvalues of integral equation (12)
- ξ :
-
Coordinate integration variable
- ξ′:
-
Dimensionless coordinate integration variable
- τ :
-
Time integration variable
- φ2r (x′):
-
Eigenfunctions of integral equation (4)
- φ m (x′):
-
Eigenfunctions of integral equation (12)
References
Priest, M., Dowson, D., Taylor, C.M.: Predictive wear modelling of lubricated piston rings in a diesel engine. Wear 231, 89–101 (1999)
Yang, L.J.: A test methodology for the determination of wear coefficient. Wear 259, 1453–1461 (2005)
Liu, Zh, Neville, A., Reuben, R.L., Shen, W.: The contribution of a soft thin (metallic) film to a friction pair in the running-in process. Tribol. Lett. 11, 161–169 (2001)
Kumar, R., Prakash, B., Sethuramiah, A.: A systematic methodology to characterise the running-in and steady-state wear processes. Wear 252, 445–453 (2002)
Yang, L.J.: The effect of nominal specimen contact area on the wear coefficient of A6061 aluminium matrix composite reinforced with alumina particles. Wear 263, 939–948 (2007)
Blau, P.J.: Embedding wear models into friction models. Tribol. Lett. 42, 75–79 (2009)
Fadin, YuA, Leksovskii, A.M., Ginzburg, B.M., Bulatov, V.P.: Periodicity of acoustic emission with dry friction between steel and brass. Tech. Phys. Lett. 19, 136–138 (1993)
Fadin, YuA: Dynamics of surface damage in dry friction. Tech. Phys. Lett. 23, 606–607 (1997)
Argatov, I.I., Fadin, Yu.A: Asymptotic modeling of the long-period oscillations of tribological parameters in the wear process of metals under heavy duty sliding conditions with application to structural health monitoring. Int. J. Eng. Sci. 48, 835–847 (2010)
Zheng, M., Naeim, A.H., Walter, B., John, G.: Break-in liner wear and piston ring assembly friction in a spark-ignited engine. Tribol. Trans. 41, 497–504 (1998)
Galin, L.: Contact problems of the theory of elasticity in the presence of wear. J. Appl. Math. Mech. 40, 931–936 (1976)
Galin, L., Goryacheva, I.G.: Axisymmetric contact problem of the theory of elasticity in the presence of wear. J. Appl. Math. Mech. 41, 826–831 (1977)
Komogortsev, V.F.: Contact between a moving stamp and an elastic half-plane when there is wear. J. Appl. Math. Mech. 49, 243–246 (1985)
Peigney, M., Stolz, C.: An optimal control approach to the analysis of inelastic structures under cyclic loading. J. Mech. Phys. Solids 51, 575–605 (2003)
Peigney, M.: Simulating wear under cyclic loading by a minimization approach. Int. J. Solids Struct. 41, 6783–6799 (2004)
Aleksandrov, V.M., Galin, L., Piriev, N.P.: A plane contact problem for an elastic layer of considerable thickness in the presence of wear. Mekh Tverd Tela 4, 60–67 (1978). (in Russian)
Meng, H.C., Ludema, K.C.: Wear models and predictive equations: their form and content. Wear 181–183, 443–457 (1995)
Argatov, I.I.: Solution of the plane Hertz problem. J. Appl. Mech. Tech. Phys. 42, 1064–1072 (2001)
Johnson, K.L.: Contact Mechanics. Cambridge Univ. Press, Cambridge (1985)
Goryacheva, I.: Contact Mechanics in Tribology. Kluwer Academic Publishers, Dordrecht (1998)
Kragelskii, I.V., Dobychin, M.N., Kombalov, V.S.: Friction and Wear: Calculation Methods. Pergamon, Oxford (1982)
Acknowledgments
This study was partially carried out at the Mondragon University (Basque Country, Spain). One of the authors (I.I. Argatov) thanks Dr. X. Gómez, Dr. W. Tato, and A. Cruzado for the fruitful discussions. Yu.A. Fadin wishes to thank the Russian Foundation for Basic Research for partial support of this work (project Nos. 10-08-00966-a, 10-08-90006Bel_a).
Author information
Authors and Affiliations
Corresponding author
Appendix: Determining Eigenvalues in the Wear Contact Problem with Prescribed Displacement
Appendix: Determining Eigenvalues in the Wear Contact Problem with Prescribed Displacement
Following Aleksandrov et al. [16], we employ the biorthogonal expansion
where \( T_{l} \left( {x^{\prime}} \right) = \cos (l { \arccos } x)\,,l = 1, 2, \ldots , \) are the Chebyshev polynomials.
Using the representation
where P 2m (x′) are the Legendre polynomials, one can derive the following infinite linear algebraic system for determination of the coefficients a (r) m :
Here we used the notation
Finally, we transform the system (26) into the following one:
The results of numerical calculations based on the homogeneous system (27), (28) are presented in Table 1. We note the computational misprints in article [16].
Rights and permissions
About this article
Cite this article
Argatov, I.I., Fadin, Y.A. A Macro-scale Approximation for the Running-in Period. Tribol Lett 42, 311–317 (2011). https://doi.org/10.1007/s11249-011-9775-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11249-011-9775-9