
Abstract
We generalize the Jacobi elliptic function expansion method used to solve the (3 + 1)-dimensional nonlinear Schrödinger equation for the case of an arbitrary inverse of an elliptic integral. Among the obtained solutions are functions based on the Weierstrass elliptic function and the inverses of Carlson’s elliptic integrals.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The generalized nonlinear Schrödinger equation (NLSE) is a generic model that is very important in NL optics, where it describes the full spatiotemporal optical solitons or light bullets (Akhmediev and Ankiewicz 1997; Kivshar and Agrawal 2003; Hasegawa and Matsumoto 2003; Malomed 2006). For this equation, along with several other related equations such as the Klein–Gordon (KG) equation and the Korteweg de-Vries (KdV) equation, there is a large interest in finding novel exact solutions (Drazin and Johnson 1989). One of the most popular approaches is to use an expansion method which assumes a certain ansatz for the solutions and the solutions are then expanded in terms of one or perhaps more than one function, as was done in Ref. Zhang (2010). Some of the most popular expansion methods are the trigonometric function expansion method (Zhang 2008; Zhang et al. 2011c), including hyperbolic trigonometric functions (Malfliet and Hereman 1996; Zhang et al. 2013a), the exponential function expansion method (He and Wu 2006), the \(\left( \frac{G^{\prime }}{G}\right)\)-expansion method (Li and Wang 2009; Miao and Zhang 2011; Zhang et al. 2013b), the bifurcation method (Zhang et al. 2011a, b) and the first integral method (Zhang et al. 2013c). These forms of solutions have in common that they assume a linear form for the phase of the solution. However, Kruglov et al. (2003) have proposed an ansatz for the solution to the NLSE which involves a quadratic term in the phase, commonly known as the chirp (Lai and Cai 2011).
A prominent expansion method that has emerged is the Jacobi elliptic function (JEF) expansion method (Zhang 2012, 2015). The JEF is a natural choice for the NLSE with a Kerr nonlinearity because it satisfies the second order nonlinear differential involving a nonlinear term of the third degree and also because it encompasses both traveling and solitary wave solutions (Olver 2010). Recently, there has been a huge development in obtaining stable spatiotemporal soliton solutions, with and without chirp, for a higher number of transverse dimensions (Malomed 2006; Zhong 2008) using the JEF-expansion method and the principle of harmonic balance. The traveling wave and soliton solutions to the generalized NLSE in (3 + 1) dimensions ((3 + 1)-D) for the cubic nonlinearity were first developed in Belić (2008) for the anomalous dispersion and were generalized in Petrović (2009) for the normal dispersion. However, the important task remains to generalize these solutions to a wider range of functions.
2 Method
In this paper we expand the work done in Belić (2008) to find new spatiotemporal traveling wave solutions to the NLSE. We consider the standard form of the NLSE (Malomed et al. 2005):
which describes evolution of a slowly-varying wavepacket envelope u(x, y, z, t) in a diffractive nonlinear Kerr medium with anomalous dispersion, in the paraxial approximation. Here, z is the propagation coordinate, \({\varDelta }_\perp =\partial _x^{2}+\partial _y^{2}\) represents the transverse Laplacian, and t is the reduced time, i.e. time in the frame of reference moving with the wavepacket. All coordinates are made dimensionless by the choice of coefficients. The functions \(\beta\), \(\chi\), and \(\gamma\) stand for the diffraction/dispersion, nonlinearity, and gain coefficients, respectively. As in Belić (2008) we define u in terms of amplitude and phase \(u(z,x,y,t) = A(z,x,y,t) \exp {\left( iB(z,x,y,t)\right) }\) and assume the following form of the solutions:
where \(f, g, k, l, m, \omega , a, b, e\) are parameter functions to be determined.
The key difference from the previous paper is that we will assume F to be the solution of a more general differential equation:
whereas for the Jacobi elliptic functions (JEFs) used in Belić (2008) we had \(c_1=c_3=0\). This differential equation has been previously used in several papers, namely in Fan (2002), Lan-Fang et al. (2011), Wang et al. (2006) and in Zhang et al. (2013d) for \(c_0=c_1=0\). However, the ansatz with the more general equation has never been applied to the (3 + 1)-D NLSE and in no case was the effect of chirp considered. In this paper we will explicitly assume \(c_1\ne 0\) or \(c_3\ne 0\).
Applying the F-expansion method and the principle of harmonic balance we obtain the following system of algebraic and first order differential equations for \(f_i\; (i=1,2,3), a, b, k, l, m\) and \(\omega\):
Instead of two equations for \(\chi\) as was obtained in Belić (2008) we obtain four equations:
Equation (11) (or Eq. (12) if \(f_2=0\)) will give us the formula for \(\chi (z)\), given arbitrary values of \(\beta (z)\) and \(\gamma (z)\), while the remaining three equations, if not automatically satisfied, will impose constraints on \(c_i\) (\(i=0,\ldots ,4\)). For the equation for e we obtain two equations instead of one:
We will require an additional matching condition imposed on the coefficients \(c_i\) (\(i=0,\ldots ,4\)) for both equations to be satisfied simultaneously.
3 Results
We now proceed to solve the system of ordinary algebraic and differential equations obtained in Sect. 2. Using standard elementary calculus, Eqs. (6)–(10) are solved as in Belić (2008) to obtain:
where:
is the chirp function and subscript ‘0’ denoted the value of the respective function at \(z=0\).
From solving Eqs. (11)–(14) we obtain three distinct cases.
3.1 Case I: \(f_3=0\)
Assuming \(f_3=0\), Eqs. (12) and (14) are automatically satisfied, and from Eqs. (11) and (13) we obtain:
The matching condition is:
The formula for e is:
For \(c_1=0\), the condition (25) reduces to \(c_3=\pm 2\sqrt{c_2c_4}\). A range of functions that can be used in this case is given in Refs. Lan-Fang et al. (2011) and Zhang et al. (2013d).
3.2 Case II: \(f_2=0\)
Assuming \(f_2=0\), Eqs. (11) and (13) are automatically satisfied, and from Eqs. (12) and (14) we obtain:
The matching condition is:
The formula for e is:
For \(c_3=0\), the condition (29) reduces to \(c_1=\pm 2\sqrt{c_2c_0}\).
For this case, the function of most interest which satisfies the necessary requirement \(c_0, c_1\ne 0\) is the Weierstrass elliptic function (WEF) (Lawden 1989). It is well known that for the WEF \(\wp (x;g_2, g_3)\) we have \(c_4=c_2=0\), \(c_3=4\), \(c_1=-g_2\) and \(c_0=-g_3\). Using Eq. (29) we get \(g_2^3=32g_3^2\). In Fig. 1 we see the solutions plotted with and without chirp for \(g_3=1\) and \(g_2=\root 3 \of {32}\). Thus we have shown that the WEF can also be used in the F-expansion method for solving the (3 + 1)-D NLSE.

A solution for Case II using the Weierstrass elliptic function. The parameters are: \(F=\wp (x;\root 3 \of {32}, 1), f_{10}=b_0=k_0=l_0=m_0=1, \omega _0=0\) and a \(a_0=0\), b \(a_0=0.3\)
3.3 Case III: \(f_2, f_3\ne 0\)
Assuming both \(f_2\) and \(f_3\) are non-zero, we obtain the following equations:
and an additional condition:
needed to make Eqs. (11)–(14) consistent. The formula for \(\chi (z)\) is the same as the one in Eqs. (24). The matching condition for Eqs. (15)–(16) is:
The formula for e is:
Note that a symmetric formula for (33) is also available using \(c_0\), \(c_1\) and \(c_3\).
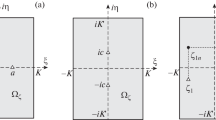
For this case we will chose the following values of coefficients, which satisfy conditions (32) and (33): \(c_4=-1\), \(c_3=2\), \(c_2=0\), \(c_1=1\) and \(c_0=-1/4\). The polynomial \(p(F)=c_0+c_1 F+c_2 F^2+c_3 F^3+c_4 F^4\) has two positive zeros, giving us a range for \(\dfrac{d F}{d\theta }\) that insures bounded solutions (Drazin and Johnson 1989). When the polynomial P has distinct zeros, function F can be considered an inverse of Carlson’s elliptic integrals (Carlson 1987), though cases with complex conjugate zeros can also be evaluated (Carlson 1977). A plot is given in Fig. 2. The plots depict roughly a single period of the function. We can see that the combination of two elliptic functions, given that both \(f_2\) and \(f_3\) are non-zero. Also, it is important to note that unlike JEF the maxima and minima of F are not the same width, due to the asymmetry of the elliptic integral. The modulational stability of these solutions is not addressed in this paper, though is likely that the solutions are stable since work done in Petrović et al. (2015) has shown that in most regimes solutions to Eq. (1) obtained in Belić (2008), Petrović (2009) are either unconditionally modulationally stable or stable under the regime of dispersion management.

A solution for Case III where function F satisfied the differential equation \(\dfrac{d F}{d\theta }=-\dfrac{1}{4}+F+2 F^3-F^4\) for \(x=y=t=0\). Other parameters are the same as in Fig. 1
4 Conclusion
To sum up, we have generalized the Jacobi elliptic function expansion method for the case of a general fourth order-polynomial for the elliptic integral. We have shown that it is possible to use the Weierstrass elliptic function in the F-expansion method for the (3 + 1)-D NLSE. Finally, we have shown that general inverses of elliptic integrals may be used for solving the (3 + 1)-D NLSE. This opens the door to a far more general class of solutions for the (3 + 1)-D NLSE than what was previously obtained.
References
Akhmediev, N., Ankiewicz, A.: Solitons. Chapman and Hall, London (1997)
Belić, M., et al.: Analytical light bullet solutions to the generalized (3 + 1)-dimensional nonlinear Schrödinger equation. Phys. Rev. Lett. 101, 123904 (2008)
Carlson, B.: Elliptic integrals of the first kind. SIAM J. Math. Anal. 8(2), 231–242 (1977)
Carlson, B.: A table of elliptic integrals of the second kind. Math. Comput. 49(180), 595–606 (1987)
Drazin, P.G., Johnson, R.S.: Solitons: An Introduction, Chapter 2. Cambridge University Press, Cambridge (1989)
Fan, E.: Travelling wave solutions in terms of special functions for nonlinear coupled evolution systems. Phys. Lett. A 300, 243–249 (2002)
Hasegawa, A., Matsumoto, M.: Optical Solitons in Fibers. Springer, Berlin (2003)
He, J., Wu, X.: Exp-function method for nonlinear wave equations. Chaos Solitons Fractals 30, 700–708 (2006)
Kivshar, Y., Agrawal, G.: Optical Solitons, from Fibers to Photonic Crystals. Academic, New York (2003)
Kruglov, V., Peacock, C., Harvey, J.: Exact self-similar solutions of the generalized nonlinear Schrödinger equation with distributed coefficients. Phys. Rev. Lett. 90, 113902 (2003)
Lai, X., Cai, X.: Chirped wave solutions of a generalized (3 + 1)-dimensional nonlinear Schrödinger equation. Z. Naturforsch. 66a, 392–400 (2011)
Lan-Fang, S., Cai-Sheng, C., Xian-Chun, Z.: The extended auxiliary equation method for the KdV equation with variable coefficients. Chin. Phys. B 20, 100507 (2011)
Lawden, D.: Elliptic Functions and Applications. Springer, New York (1989)
Li, L., Wang, M.: The \(\left(\frac{G^{\prime }}{G}\right)\)-expansion method and travelling wave solutions for a higher-order nonlinear Schrödinger equation. Appl. Math. Comput. 208, 440–445 (2009)
Malfliet, W., Hereman, W.: The tanh method: I. Exact solutions of nonlinear evolution and wave equations. Phys. Scr. 54, 563–568 (1996)
Malomed, B.: Soliton Management in Periodic Systems. Springer, Berlin (2006)
Malomed, B.A., Michalache, D., Wise, F., Torner, L.: Spatiotemporal optical solitons. J. Opt. B 7, R53–R72 (2005)
Miao, X., Zhang, Z.: The modified \(\left(\frac{G^{\prime }}{G}\right)\)-expansion method and traveling wave solutions of nonlinear the perturbed nonlinear Schrödingers equation with Kerr law nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 16, 4259–4267 (2011)
Olver, F.W.: NIST Handbook of Mathematical Functions, Chapter 22. Cambridge University Press, Cambridge (2010)
Petrović, N., et al.: Exact spatiotemporal wave and soliton solutions to the generalized (3 + 1)-dimensional Schrödinger equation for both normal and anomalous dispersion. Opt. Lett. 34, 1609–1611 (2009)
Petrović, N., Aleksić, N.B., Belić, M.R.: Modulation stability analysis of exact multidimensional solutions to the generalized nonlinear Schrödinger equation and the Gross–Pitaevskii equation using a variational approach. Opt. Exp. 23, 10616–10630 (2015)
Wang, Q., Chen, Y., Zhang, H.: Generalized algebraic method and new exact traveling wave solutions for (2 + 1)-dimensional dispersive long wave equation. Appl. Math. Comput. 181, 247–255 (2006)
Zhang, Z.: New exact traveling wave solutions for the nonlinear Klein–Gordon equation. Turk. J. Phys. 32, 235–240 (2008)
Zhang, Z.: Jacobi elliptic function expansion method for the modified Korteweg–de Vries–Zakharov-Kuznetsov and the Hirota equations. Rom. J. Phys. 60, 1384–1394 (2015)
Zhang, Z., et al.: New exact solutions to the perturbed nonlinear Schrödinger’s equation with Kerr law nonlinearity. Appl. Math. Comput. 216, 3064–3072 (2010)
Zhang, Z., et al.: Qualitative analysis and traveling wave solutions for the perturbed non-linear Schrödinger equation with Kerr law nonlinearity. Phys. Lett. A 375, 1275–1280 (2011a)
Zhang, Z., Gan, X., Yu, D.: Bifurcation behaviour of the travelling wave solutions of the perturbed nonlinear Schrödinger equation with Kerr law nonlinearity. Z. Naturforsch 66a, 721–727 (2011b)
Zhang, Z., et al.: New exact solutions to the perturbed nonlinear Schrödinger’s equation with Kerr law nonlinearity via modified trigonometric function series method. Commun. Nonlinear Sci. Numer. Simul. 16, 3097–3106 (2011c)
Zhang, Z., et al.: A note on exact traveling wave solutions of the perturbed nonlinear Schrödingers equation with Kerr law nonlinearity. Commun. Theor. Phys. 57, 764–770 (2012)
Zhang, Z., et al.: Abundant exact traveling wave solutions for the Klein–Gordon–Zakharov equations via the tanh–coth expansion method and and Jacobi elliptic function expansion method. Rom. J. Phys. 58, 749–765 (2013a)
Zhang, Z., et al.: A new method to construct travelling wave solutions for the Klein–Gordon–Zakharov equations. Pramana 80, 766–777 (2013b)
Zhang, Z., et al.: First integral method and exact solutions to nonlinear partial differential equations arising in mathematical physics. Rom. Rep. Phys. 65, 1155–1169 (2013c)
Zhang, Z., et al.: Exact traveling wave solutions of the perturbed Klein–Gordon equation with quadratic nonlinearity in (1+1)-dimension, part I: without local inductance and dissipation effect. Turk. J. Phys. 37, 259–267 (2013d)
Zhong, W., et al.: Exact spatial soliton solutions of the two-dimensional generalized nonlinear Schrdinger equation with distributed coefficients. Phys. Rev. A 78, 023821 (2008)
Acknowledgments
The work in Serbia is supported by the Serbian Ministry of Education and Science under project OI 171006.
Author information
Authors and Affiliations
Corresponding author
Additional information
This article is part of the Topical Collection on Advances in the Science of Light.
Guest Edited by Jelena Radovanovic, Milutin Stepić, Mikhail Sumetsky, Mauro Pereira and Dragan Indjin.
Rights and permissions
About this article

Cite this article
Petrović, N.Z., Bohra, M. General Jacobi elliptic function expansion method applied to the generalized (3 + 1)-dimensional nonlinear Schrödinger equation. Opt Quant Electron 48, 268 (2016). https://doi.org/10.1007/s11082-016-0522-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-016-0522-1