
Abstract
This article investigates an adaptive output feedback control problem for a non-holonomic system with integral input-to-state stable inverse dynamics and output constraints. A tan-type barrier Lyapunov function is utilized to handle asymmetric time-varying output constraints, and the full-order observer is constructed to estimate the unmeasurable state. The dynamic uncertainty is eliminated by changing the supply rate of the integral input-to-state stability. It is demonstrated that the closed-loop system is asymptotically stable, and the output does not violate the asymmetric time-varying constraints under this control scheme. A simulation example validates the effectiveness of the proposed controller.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Cascaded systems are a class of nonlinear systems composed of two or more subsystems. Many mechanical systems can be described as cascaded systems, such as robot systems, multi-agent systems, and trailer systems [1,2,3]. The stability analysis of cascaded systems has attracted extensive attention in recent decades [4,5,6]. Generally, the stability characteristics of subsystems cannot determine the stability of cascaded systems [7]. To alleviate this difficulty, various control methods for nonlinear cascaded systems have been developed. An intuitive way to address this problem is to design a full-state feedback controller that fully uses the state information of the whole cascaded system [8,9,10]. Another essential idea is to utilize partial-state feedback control to stabilize the cascaded system [11,12,13]. In [14], a stepwise constructive partial-state feedback control strategy based on input-to-state stability was proposed. In addition, a smooth controller for a class of nonlinear cascaded systems was designed in [15] by combining the feedback control scheme and variable separation technology. Unlike previous research, we propose a control approach based on integral input-to-state stability, which ensures the stability of the nonlinear cascaded system.
The input-to-state stable (ISS) concept introduced by [16] has been proven to be a valid instrument for studying the robust stability of nonlinear cascaded systems. Its various properties have been thoroughly investigated [17,18,19]. Compared with the ISS concept, the integral input-to-state stable (iISS) concept [20] is strictly weaker and can contain a broader class of nonlinear systems with practical significance. Jiang et al. [21] solved the problem of output feedback robust regulation and proposed a unified framework for a type of nonlinear cascaded systems with inverse dynamics. In [22], a small gain theorem was obtained for interconnected nonlinear systems using state-dependent characterization. The results in [23] removed the technical conditions and covered more common situations than earlier studies. Yu et al. [24] further considered the technology for changing the supply rate and discussed the necessity of the given conditions for the case in which the attenuation rate involves an oscillation function. In this paper, we analyze the iISS subsystem and address a decay rate that includes an oscillation function.
Owing to physical factors, safety requirements, and performance indicators, almost all mechanical equipment operates under output or state constraints. Consequently, it is of great value to investigate the output and state constraints of a system in control theory and practical applications. Various approaches have been adopted to handle state and output constraints [25, 26]. In the past few years, the utilization of the barrier Lyapunov function (BLF) has become increasingly common to prevent constraint violations in nonlinear systems [27,28,29]. In addition, many types of BLF are investigated in [30,31,32], such as the log-type BLF, the integral-type BLF, and the tan-type BLF. The tan-type BLF has the benefit of integrating constraint analysis into a general method, and it can utilize the system’s structural characteristics. However, few results have been obtained regarding the controller design and stability analysis of nonlinear cascaded systems with output constraints and iISS inverse dynamics.
This paper considers the stability of nonlinear cascaded systems with iISS inverse dynamics and asymmetric time-varying output constraints. The proposed control strategy ensures the stability of nonlinear cascaded systems. Moreover, the output satisfies asymmetric time-varying constraints at all times. A BLF-based controller for a nonlinear cascaded system is designed based on backstepping. Dynamic uncertainty is eliminated by changing the iISS supply rate. A tan-type BLF handles asymmetric time-varying output constraints, and a full-order observer estimates the unmeasurable state. Finally, we can guarantee that the system output does not violate the constraints and that all signals in the closed-loop system are bounded. Simulation results show that the method is effective.
Notations The set of natural numbers is denoted by N, and i-dimensional Euclidean space by \(R^{i}\). The set of all positive real numbers is \(R_{+}\). A continuous function \(\zeta : R_{+}\rightarrow R_{+}\) is said to be of class \(\mathcal {P}\) and written as \(\zeta \in \mathcal {P}\) if \(\zeta (s)>0\) for all \(s\in R_{+}\backslash \{0\}\) and \(\zeta (0)=0\). A class \(\mathcal {P}\) function is said to be of class \(\mathcal {K}\) if it is strictly increasing. It is of class \(\mathcal {K}_{\infty }\) if, in addition, \(\lim _{s\rightarrow \infty }\zeta (s)=\infty \) is satisfied. x(t) represents an appropriate time-varying vector, and ||x(t)|| is defined as the Euclidean norm of x at time t. \(||x||_{\infty }=sup_{t\ge 0}|x(t)|\), and if \(||x||_{\infty }\) is real, state \(x\in L_{\infty }\). For an n-dimensional vector \(x=(x_{1},\ldots ,x_{n})^{T}\in R^{n}\), we write \(x_{[i]}=(x_{1},\ldots ,x_{i})^{T}\) when \(i=2,\ldots ,n-1\).
2 Problem description
Consider the following class of uncertain chained non-holonomic cascaded systems with output constraints:
where \((x_{0},x^{T})^{T}=(x_{0},x_{1},x_{2},\ldots ,x_{n})^{T}\) and \((u_{0}, u_{1})\) stand for system states and control inputs, respectively; \(y \in R^{2}\) is the measurable output of the system; \(\eta \in R^{r}\) represents unmeasured dynamic uncertainty; \(\varphi _{0}(x_{0})\) denotes a well-known smooth, nonnegative function related to \(x_{0}\); and \(\phi _{i}^{d}(\cdot )\in R (i=1,\ldots ,n)\) is a kind of unknown nonlinear function.
The following are asymmetric time-varying constraints on the output y:
where \(k_{i1}(t)>0\) and \(k_{i2}(t)>0\) are preassigned functions.
Assumption 1
[33] There is a positive definite smooth iISS-Lyapunov function \(U_{0}(\eta )\) for the \(\eta \)-subsystem, such that
where \(\underline{\alpha }_{\eta }(\cdot )\), \(\overline{\alpha }_{\eta }(\cdot )\), \(\gamma _{0}(\cdot )\in {\mathcal {K}}_{\infty }\), \(\alpha _{0}\in \mathcal {P}\), and \(\gamma _{0}(\cdot )\) satisfies \(\gamma _{0}(s)=\mathcal {O}(s^{2})\) as \(s\rightarrow 0_{+}\).
Assumption 2
[34] There exist known nonnegative smooth functions \(\varphi _{i}(u_{0},x_{0},x_{1})\) and unknown nonnegative smooth functions \(\psi _{i}(\eta )\) for every \(1\le i\le n\), such that
where \(\psi _{i}^{2}(s)=\mathcal {O}(\alpha _{0}(s)), s\rightarrow 0_{+}\) holds when \(\liminf _{s\rightarrow \infty }\alpha _{0}(s)=\infty \), and \(\psi _{i}^{2}(s)=\mathcal {O}(\alpha _{0}(s)), s\rightarrow 0_{+}, s\rightarrow \infty \) holds when \(\liminf _{s\rightarrow \infty }\alpha _{0}(s)<\infty \).
Remark 1
Assumption 1 is typical in papers related to input-to-state stability. The concept of the iISS-Lyapunov function in Assumption 1 is mainly used to describe the dynamic uncertainty of the system under study [34] and has become a core tool for the analysis of nonlinear cascaded systems. Assumption 2 states that the unmeasurable dynamic uncertainty can be separated from the nonlinear drift term using a separation Lemma [35] and treated separately, which is a more general assumption than [36]. In addition, to overcome the influence of the nonlinear drift term \(\psi _{i}(\eta )\), it is necessary to impose a local small gain condition.
Lemma 1
[37] For any \(\tau \in [0,1)\), the following inequality is established
3 Design of output feedback controller
We construct output feedback controllers to asymptotically stabilize a cascaded system with output constraints.
3.1 Discontinuous input state scaling transformation
We first consider the case that \(x_{0}\ne 0\) and choose the following form of control rate:
where \(\lambda _{0}\) is a positive design parameter. Using the Gronwall–Bellman inequality, we can obtain that for any initial instant \(t_{0}\ge 0\) and any initial condition \(x_{0}(t_{0})\in R\), the corresponding solution \(x_{0}(t)\ne 0\) for each \(t\ge t_{0}\) [6]. Therefore, \(u_{0}\ne 0\) at any time \(t\ge t_{0}\).
When \(u_{0}\ne 0\), the state scaling is defined as
Accordingly, the following systems are obtained:
where \(\bar{\phi }_{i}^{d}(u_{0},x_{0},x,\eta )=\frac{\phi _{i}^{d}(u_{0},x_{0},x,\eta )}{u_{0}^{n-i}}\), \(i=1,\ldots ,n\), and \(z_{1}(0)\in \varOmega _{z_{1}}\), \(\varOmega _{z_{1}}=\{z_{1}\in R:-b_{11}(t)<z_{1}(t)<b_{12}(t)\}\), with pre-allocated functions \(b_{11}(t)>0\), \(b_{12}(t)>0\).
Assumption 3
The time-varying constraints \(k_{ij}(t)(i=0,1,j=1,2)\) on the output y and the time-varying constraints \(b_{1j}(t)(j=1,2)\) on \(z_{1}\) are continuous and bounded, and there are positive constants \(\underline{k}_{i1},\underline{k}_{i2},\underline{b}_{11},\underline{b}_{12},\overline{k}_{i1},\overline{k}_{i2},\overline{b}_{11}\), and \(\overline{b}_{12}\) such that \(\underline{k}_{i1}\le {k}_{i1}(t)\), \(|{\dot{k}}_{i1}(t)|\le \overline{k}_{i1}\), \(\underline{k}_{i2}\le {k}_{i2}(t)\), \(|{\dot{k}}_{i2}(t)|\le \overline{k}_{i2}\), \(\underline{b}_{11}\le {b}_{11}(t)\), \(|{\dot{b}}_{11}(t)|\le \overline{b}_{11}\), \(\underline{b}_{12}\le {b}_{12}(t)\), \(|{\dot{b}}_{12}(t)|\le \overline{b}_{12}\).
Remark 2
Assumption 3 slightly relaxes the corresponding assumptions imposed on the constrained nonlinear system in [38] by removing the upper bound of the constraint. These constraints are commonly used in practice to ensure that the conditions are bounded when the output has restrictions [37].
Because \(u_{0}=-\lambda _{0}x_{0}-x_{0}\varphi _{0}(x_{0})\) and \(\dot{x}_{0}=-\lambda _{0}x_{0}\), it is easy to see that
where \(\bar{\varphi }_{0}(x_{0})\) is a known smooth continuous function, and \(\omega \) is a known constant.
From Assumption 2, for each \(\bar{\phi }_{i}^{d}(u_{0},x_{0},x,\eta )~(i=1, \ldots , n)\),
3.2 Constructing a full-order observer
For convenience of discussion, we write (9) as
where \( E = \left[ {\begin{array}{cc} 0 &{} I_{n-1} \\ 0 &{} 0 \\ \end{array} } \right] \), \( \bar{\phi }^{d}(u_{0},x_{0},x,\eta ) = \left[ {\begin{array}{c} \bar{\phi }_{1}^{d}(\cdot ) \\ \vdots \\ \bar{\phi }_{n}^{d}(\cdot ) \\ \end{array} } \right] \), \( b = \left[ {\begin{array}{c} 0 \\ \vdots \\ 1 \\ \end{array} } \right] \), and \(F=diag\{n-1,\ldots ,1,0\}\).
The controller is designed by using the full-order observer
where \(C^{T}=[1,0,\ldots ,0]\) and the gain matrix \(G=(g_{ij})_{n\times n}\), with \(g_{ij}=g_{ji}(i,j=1,\ldots ,n)\) derived from
The following Lemma guarantees that (13) and (14) make sense.
Lemma 4
[39] There exist two strictly positive real numbers, \(g_{min}\) and \(g_{max}\), so that the solution G(t) of the following equation satisfies \(g_{min}I_{n}\le G(t)\le g_{max}I_{n}, t\ge 0\), for any continuous function \(\mu _{0}(t)\):
Define the error \(\varepsilon =z-\hat{z}\). From (12) and (13), it follows that
Lemma 5
Select \(V_{\varepsilon }(\varepsilon , G)=\varepsilon ^{T}G^{-1}(t)\varepsilon \) to respond to the error system. Then the time derivative of \({V}_{\varepsilon }\) along (14) is
where \(\varphi _{z_{1}}(x_{0},x_{1})\) is given in the following proof.
Proof
Based on \(\dot{\overbrace{G^{-1}(t)}}=-G^{-1}(t)\dot{G}(t)G^{-1}(t)\), the time derivative of \(V_{\varepsilon }(\varepsilon ,G)\) satisfies
Applying Young’s inequality,
From (11), it follows that
After analysis, it holds that
where \(\varphi _{z_{1}}(x_{0},x_{1})=1+4\varSigma _{i=1}^{n}u_{0}^{2i-2}\varphi _{i}^{2} (\cdot )+2\varSigma _{i=1}^{n}z_{1}^{2} \)\( u_{0}^{4i-4}\). The proof is completed. \(\square \)
3.3 Stability design of \(x_{0}\) subsystem
For the control design, we construct a tan-type BLF
where \(k_{b0}=k_{02}\) if \(x_{0}>0\), and otherwise \(k_{b0}=k_{01}\).
Remark 3
The analysis form of traditional BLFs [38] has the shape \(V_{0}(x_{0})=\frac{1}{2}\log \frac{k_{b0}^{2}}{k_{b0}^{2}-x_{0}^{2}}\), which is not suitable for integrating the constraint analysis into a general approach. Compared with the traditional log-type BLF, the tan-type BLF can make full use of the structural characteristics of system (1) and has more attractive characteristics. When there are no constraints on \(x_{0}\) (i.e., constraint \(k_{b0}\) is infinite), we can obtain \(\lim _{k_{b0}\rightarrow \infty }\frac{k_{b0}^{2}}{\pi }\tan (\frac{\pi x_{0}^{2}}{2k_{b0}^{2}})=\frac{1}{2}x_{0}^{2}\). Therefore, the proposed tan-type BLF can handle the stability problem with or without constraints.
Taking the derivation of \(V_{0}(x_{0})\) yields
For convenience of calculation, we define
By the definition of \(\phi _{b0}(x_{0})\) and (23),
Substituting (7) into (26) yields
where \(\lambda _{0}>\nu _{1}\ge \frac{2\bar{k}_{b0}}{\underline{k}_{b0}}\), \(\bar{k}_{b0}=\max \{\bar{k}_{01}, \bar{k}_{02}\}\), \(\underline{k}_{b0}=\min \{\underline{k}_{01}, \underline{k}_{02}\}\). Because \(\dot{V}_{0}(x_{0})\le -(\lambda _{0}-\nu _{1})x_{0}^{2}V_{0}\le 0\), \(x_{0}(t)\) exponentially converges to zero.
Next, we prove that \(x_{0}\) satisfies time-varying constraints.
and correspondingly,
3.4 Backstepping design
The controller is devised by applying the backstepping method. Consider the system
where \(C_{2}=[0,1,\ldots ,0]^{T},\ldots ,C_{n}=[0,0,\ldots ,1]^{T}\).
Suppose \(z(0)\in \{z(t)\in R^{n}|-b_{11}(t)<z_{1}(t)<b_{12}(t)\}\) and define the Lyapunov function
where \(k_{b1}=b_{12}\) if \(x_{0}>0\), and otherwise \(k_{b1}=b_{11}\).
Alternatively, as shown previously, we may calculate the derivative of \(V_{k_{b1}}\) to obtain
and
Applying the inequality of Lemma 1, it follows that
where \(\nu _{2}\ge \frac{2\bar{k}_{b1}}{\underline{k}_{b1}}\), \(\bar{k}_{b1}=\max \{\bar{b}_{11}, \bar{b}_{12}\}\), and \(\underline{k}_{b1}=\min \{\underline{b}_{11}, \underline{b}_{12}\}\). We next explore the design of the backstepping method.
Step 1 Let \(\xi _{1}=z_{1}\) and \(\xi _{2}=\hat{z}_{2}-\alpha _{1}\), where \(\alpha _{1}\) is the virtual control law, and \(\xi _{2}\) is the error variable. We choose the candidate BLF as
and from (11)
Substituting (38) and (39) into (37), \(\dot{V}_{1}\) satisfies
Because \(\xi _{1}=z_{1}\), \(\alpha _{1}\) is selected as
where \(\iota _{1}(x_{0},\xi _{1})\) is a smooth, positive function dependent on \((x_{0},\xi _{1})\), which we give below. Taking (41) into (40), we get
Step \(i~(2\le i\le n)\): Suppose a few virtual control rates \(\alpha _{j}(x_{0},\xi _{1},\hat{z}_{[j]},G,k_{b1})\) with \(\xi _{j}=\hat{z}_{j}-\alpha _{j-1}(2\le j\le i)\), and some Lyapunov functions \(V_{i-1}\) have been structured in step \(i-1\),
The derivative of \(V_{i-1}\) satisfies
where the design parameter satisfy \(\iota _{j}>0\).
We plan to establish a similar property at step i. Suppose \(\xi _{i+1}=\hat{z}_{i+1}-\alpha _{i}\), and we select \(V_{i}\) as
We first take the derivative of \(\xi _{i}\) to facilitate the calculation and obtain that
From (11), one obtains
form which a virtual control rate is designed as
Then (49) can be rewritten as
In particular, when \(i=n\), the control law u(t) is chosen as
which guarantees the Lyapunov function
satisfying
Next, we will use the technology of changing the supply rate to eliminate the dynamic uncertainty. Therefore, we construct another form iISS-Lyapunov function,
where \(\rho (s)\) is a continuously nondecreasing positive function to be selected.
Since \(\eta \) satisfies the iISS condition in Assumption 1, it holds that
(i) In the case that \(\liminf _{s\rightarrow \infty }\alpha _{0}(s)=\infty \), it can be known that there exists a \(\mathcal {K}_{\infty }\) function \(\hat{\alpha }\) satisfying \(\hat{\alpha }(s)\le \alpha _{0}(s)\) for any \(s\ge 0\). Because \(\hat{\alpha }(s)\le \alpha _{0}(s)\) and \(\psi _{i}^{2}(s)=\mathcal {O}(\alpha _{0}(s)), s\rightarrow 0_{+}, i=1,\ldots ,n\), it can be obtained that there exists a continuous nondecreasing positive function q(s) satisfying \(\psi _{i}^{2}(s)\le q(s)\alpha _{0}(s)\), \(s\ge 0\). Considering the condition of Assumption 2 and continuity, \(\alpha _{0}\) has a maximum at \([0,s_{1}]\), which is \(\tilde{\alpha }(\tilde{s}) (0\le \tilde{s}\le s_{1})\). Consequently, the following inequality holds:
We can similarly obtain that \(\psi _{i}^{4}(s)=\mathcal {O}(\alpha _{0}(s)), s\rightarrow 0_{+}\), and \(\psi _{i}^{4}(s)\le q_{1}(s)\alpha _{0}(s)\), \(s\ge 0\), \(i=1,\ldots ,n\). Therefore, there exists an appropriate function \(\rho (\cdot )\) that satisfies
(ii) If \(\liminf _{s\rightarrow \infty }\alpha _{0}(s)<\infty \), given that \(\psi _{i}^{2}(s)=\mathcal {O}(\alpha _{0}(s)), s\rightarrow 0_{+}, s\rightarrow \infty , i=1,\ldots ,n\), there exists a constant \(c_{1}\) such that, for any \(s>0\), \(\psi _{i}^{2}(s)<c_{1}\alpha _{0}(s)\). Since \(\alpha _{0}\in \mathcal {P}\) and \(\liminf _{s\rightarrow \infty }\alpha _{0}(s)<\infty \), \(\alpha _{0}\) has a maximum value of \(\tilde{\alpha }(\tilde{s})\) on \([0,\infty )\). Thus, we can obtain that
Accordingly, (58) still holds.
Remark 4
In previous studies of nonlinear control systems with iISS inverse dynamics, the decay rate \(\alpha _{0}(s)\) is a \(\mathcal {K}\) function or a non-oscillatory function [32]. We consider the case of a general oscillation function and deal with unpredictable dynamic uncertainty in two cases. From the above analysis, we can see that, for a general oscillation function, the condition \(\psi _{i}^{2}(s)=\mathcal {O}(\alpha _{0}(s)), s\rightarrow \infty , i=1,\ldots ,n\) is necessary, i.e., if \(\liminf _{s\rightarrow \infty }\alpha _{0}(s)<\infty \), then (i) is not valid for some iISS systems.
We take into account candidate V for the total Lyapunov function in the stability study,
Then
For the small gain condition \(\gamma _{0}(s)=\mathcal {O}(s^{2}), s\rightarrow 0_{+}\) and state scaling (8), there exists a smooth positive and nondecreasing function \(\hat{\gamma }_{0}(s)\) satisfying
Therefore,
Furthermore, it holds that
Taking the constants \(0<\delta \le \frac{1}{4n}\), \(\iota _{j}\ge 1(j=2,\ldots ,n)\), and the smooth function
we examine the term
The above results can be summarized as the following theorem.
Theorem 1
Assume that the nonlinear cascaded system meets Assumptions 1–4, and the control rates are given by (7) and (52). If the output meets constraints (2), then the subsequent properties are established:
-
(i)
The signals \((x(t), \varepsilon (t), \eta (t), \xi (t))\) of the nonlinear cascaded system are bounded;
-
(ii)
The system states and control inputs asymptotically converge to 0, i.e.,
$$\begin{aligned} \lim _{t\rightarrow \infty }(||\eta (t)||+||x(t)||+||x_{0}(t)||)=0; \end{aligned}$$(67) -
(iii)
The symmetric time-varying output constraints are not violated, i.e.,
$$\begin{aligned} -k_{i1}(t)<x_{i}(t)<k_{i2}(t), i=0,1. \end{aligned}$$(68)
Proof
-
(i)
According to the definition of V, and because \(\dot{V}\le 0\), the signals \((x_{0}(t), \varepsilon (t), \eta (t), \xi (t))\) in nonlinear cascaded systems are bounded in the whole control process. Then, because \(\varepsilon _{1}\in L_{\infty }\), \(z_{1}=\xi _{1}\in L_{\infty }\), and \(\varepsilon _{1}=z_{1}-\hat{z}_{1}\), we can obtain that \(\hat{z}_{1}\in L_{\infty }\). Furthermore, we conclude that \(\alpha _{1}\) is limited due to (41). Because \(\xi _{2}=\hat{z}_{2}-\alpha _{1}\) and \(\xi _{2} \in L_{\infty }\), we can say that \(\hat{z}_{2}\in L_{\infty }\). Hence, it is concluded that \(\hat{z}_{i}(i = 1,\ldots , n)\) are bounded. Because \(\varepsilon =z-\hat{z}\) and \(\hat{z}\in L_{\infty }\), we can obtain that \(z\in L_{\infty }\). Furthermore, \(x_{i}\) are bounded by \(x_{i} = z_{i}u_{0}^{n-i}\). Therefore, the solution exists and is unique on \([0,\infty )\).
-
(ii)
LaSalle’s Invariant Theorem states that when t approaches infinity, \((\varepsilon (t),\eta (t),\xi (t))\) converge to 0. Therefore, because \(\xi _{1}=z_{1}\), \(\lim _{t\rightarrow \infty }\xi _{1}(t)=0\) then \(\lim _{t\rightarrow \infty }z_{1}(t)=0\), and \(\lim _{t\rightarrow \infty }\hat{z}_{1}(t)=0\). When t goes to infinity, \(\alpha _{1}=0\) according to its definition, meaning \(\lim _{t\rightarrow \infty }\hat{z}_{2}(t)=0\), and we obtain similar results for \(\lim _{t\rightarrow \infty }\hat{z}_{i}(t)=0~(i=3,\ldots ,n)\). We can determine \(\lim _{t\rightarrow \infty }{z}_{i}(t)=0~(i=1,\ldots ,n)\) from the definition of \(\varepsilon =z-\hat{z}\). We can use the definition of \(x_{i}\) to obtain that
$$\begin{aligned} \lim _{t\rightarrow \infty }{x}_{i}(t)=0,i=1,\ldots ,n; \end{aligned}$$(69)(iii) Similar to \(x_{0}\), we can proved that \(z_{1}\) also satisfies time-varying constraints
and
Neither \(x_{0}\) nor \(z_{1}\) violates the time-varying requirements. From (7), we know that \(u_{0}\) is a function related to \(x_{0}\). Therefore, we can obtain from (30) that \(-k_{01}(t)\varphi _{0}(x_{0})<\varphi _{0}(x_{0})x_{0}(t)<k_{02}(t)\varphi _{0}(x_{0})\) and \(-\lambda _{0}k_{02}(t)<-\lambda _{0}x_{0}(t)<\lambda _{0}k_{01}(t)\) can be obtained. Thus, the following inequality holds:
Let \(\overline{u}_{0}=k_{02}(t)\varphi _{0}(x_{0})+\lambda _{0}k_{01}(t)\) and \(\underline{u}_{0}=k_{01}(t)\varphi _{0}(x_{0})+\lambda _{0}k_{02}(t)\). Then \(-\underline{u}_{0}<u_{0}(t)<\overline{u}_{0}\), and we can obtain that \(-\underline{u}_{0}^{n-1}<u_{0}^{n-1}(t)<\max \{\underline{u}_{0}^{n-1},\overline{u}_{0}^{n-1}\}\). Let \(\tilde{u}_{0}=\max \{\underline{u}_{0}^{n-1},\overline{u}_{0}^{n-1}\}\). Then
After the above calculation, we choose \(k_{11}(t)=\max \{b_{11}(t)\tilde{u}_{0},b_{12}(t)\underline{u}_{0}^{n-1}\}\) and \(k_{12}(t)=\max \{b_{12}(t)\tilde{u}_{0},b_{11}(t)\underline{u}_{0}^{n-1}\}\). By nonlinear scaling, the constraint range of \(x_{1}\) is \(-k_{11}(t)<x_{1}(t)<k_{12}(t)\). According to (30), the output y satisfies the asymmetric time-varying constraints. This completes the proof. \(\square \)
3.5 Stabilization of x-subsystem for \(x_{0}(t_{0})=0\)
If \(x_{0}(t_{0})=0\), \(u_{0}\) is designed as
This controlled rate keeps \(x_{0}\) away from 0. Then
The initial time \(t_{0}\) satisfies \(x_{0}\varphi _{0}(x_{0}(t_{0}))=0<c\). Due to the nonnegativity and smoothness of \(\varphi _{0}(x_{0})\), there is a small neighborhood of \(x_{0}(t_{0})=0\), so that
In the period satisfying \(x_{0}\varphi _{0}(x_{0})<c\), we designed an output feedback control \(u_{0}\) form (75) and u form (52). Since \(u_{0}=c>0\) and \(\varphi _{0}(x_{0})\) is a smooth nonnegative function, \(x_{0}\) starts at 0 and grows until \(x_{0}\varphi _{0}(x_{0})=c\). At this time, we let \(x_{0}=x_{0}^{*}\), and when \(x_{0}\varphi _{0}(x_{0})=c\), the control input \(u_{0}\) is switched to (7).
The following theorem discusses the case where the initial state is zero.
Theorem 2
According to Assumptions 1–4, the system will reach a steady state and satisfy the constraint criteria in a finite time if the following switch-based output feedback control scheme applies the appropriate design parameters to system (1) with time-varying constraints (2):

Value of parameter estimation, error and gain matrix
Proof
The proof process is given in the above analysis. \(\square \)
Remark 5
The main work of this article is to add asymmetric time-varying output constraints based on [34] and relax ISS dynamic uncertainty to iISS dynamic uncertainty. The proposed control scheme ensures that the cascaded system is stable and that the asymmetric time-varying output constraints are always satisfied. We expand the scope of the constraints from previous work [37]. Since many practical systems are not always ISS, the cascaded systems studied in this paper with iISS dynamic uncertainty can include more general systems.
4 Simulation examples
Consider an uncertain nonlinear cascaded system,
where the \(\eta \)-subsystem \(\dot{\eta }=-\frac{\eta }{1+\eta ^{2}}+\eta x_{1}^{2}\) is iISS, with an iISS-Lyapunov function \(V(\eta )=\ln (1+\eta ^{2})\) and \(\alpha _{0}(|\eta |)=\frac{2\eta ^{2}}{(1+\eta ^{2})^{2}}\), \(\gamma _{0}(|x_{1}|)=2x_{1}^{2}\). From (80), we can obtain that \(\varphi _{0}(x_{0})=1\), \(\phi _{1}^{d}(u_{0},{x}_{0},x,\eta )=-x_{1}+\frac{\eta x_{1}}{1+\eta ^{2}}\) and \(\phi _{2}^{d}(u_{0},{x}_{0},x,\eta )=0\). Under the condition of Assumption 2, \(\varphi _{1}(u_{0},x_{0},x_{1})=1\), \(\psi _{1}(\eta )=\frac{\eta }{1+\eta ^{2}}\), \(\varphi _{2}(u_{0},x_{0},x_{1})=0\), and \(\psi _{2}(\eta )=0\). Therefore, we can concluded that \(\frac{\psi _{1}^{2}(s)}{\alpha _{0}(s)}=\frac{1}{2}\) and \(\frac{\psi _{2}^{2}(s)}{\alpha _{0}(s)}=0\). Since \(\liminf _{s\rightarrow \infty }\alpha _{0}(s)<\infty \), the condition in Assumption 2 is satisfied.

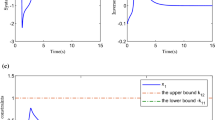
a Value track of \(x_{0}\) with time-varying constraints; b value track of \(x_{1}\) awith time-varying constraints; c value track of \(x_{2}\); d value track of \(\eta \)

a Value track of input \(u_{0}\); b value track of input u
Assuming that \(z_{1}=\frac{x_{1}}{u_{0}}\), \(z_{2}=x_{2}\), then (80) takes the form
According to the above research, the state estimation and full-order observer are written as

Trajectories of system output: a trail of \(x_{0}\); b trail of \(x_{1}\); c trail of \(x_{2}\); d trail of \(\eta \)

Parameter estimation, error and gain matrix without constraints
From the definition of \(\varepsilon \), we can obtain that
The control law is based on the backstepping technique. The controlled system can be rewritten as
The subsequent dynamic output feedback control tactics come from the proposed design scheme:
where \(\alpha _{1}=-\iota _{1}(x_{0},\xi _{1})\xi _{1} -\frac{1}{4\delta }g^{2}_{max}\xi _{1}\phi _{b1}(\xi _{1})-\xi _{1}-\frac{1}{4}\xi ^{3}\phi _{b1}(\xi _{1})+\frac{\dot{u}_{0}}{u_{0}}\xi _{1}-\nu _{2}\xi _{1}\), \(C^{T}=[1\quad 0]\), and \(C_{2}^{T}=[0\quad 1]\).
Then the simulation consequences are used to prove the availability of the projected controller design. We consider the case that \(x_{0}(t_{0})\ne 0\), and choose \(u_{0}=-\lambda _{0}x_{0}-x_{0}\). The system parameters are selected as \(\iota _{1}=\iota _{2}=1\), \(\delta =\frac{1}{6}\), \(\lambda _{0}=1\), and \(\nu _{2}=30\). We take \(k_{01}=b_{11}=0.7+0.3\cos (3t)\), \(k_{02}=b_{12}=0.7+0.3\cos (3t)\), and \(k_{11}=0.98+0.84\cos (3t)+0.18\cos ^{2}(3t)\), \(k_{12}=0.98+0.84\cos (3t)+0.18\cos ^{2}(3t)\). The initial values are selected as \(\eta (0)=1\), \(x_{0}(0)=1\), \(x_{1}(0)=-0.55\), \(g_{11}(0)=1\), \(g_{12}(0)=0\), \(g_{22}(0)=1\), \(\xi _{1}(0)=-0.5\), \(\xi _{2}(0)=0\), \(\hat{z}_{1}(0)=1\), \(\hat{z}_{2}(0)=1\), \({\varepsilon }_{1}(0)=3\), \({\varepsilon }_{2}(0)=0\).
Figures 1, 2 and 3 display the simulation effects, in which the system state and control law reach zero in a limited time. As shown in Fig. 2, the system state and unmeasurable dynamics achieve a steady state in a limited time. The trajectories of \(x_{0}\) and \(x_{1}\) are always within the specified range without violating the output constraints. Figure 1 shows that the system’s parameter estimation and error quickly converge to 0. \(z_{1}\) is always within the specified range. The asymmetric output is not violated. The parameter estimation, error, and gain are limited in the control process and become stable in approximately 8 s. Furthermore, it can be seen that the proposed robust control scheme can effectively handle the output feedback control of non-holonomic systems with output constraints and iISS dynamic uncertainties.

Control input of the closed loop system: a value track of input \(u_{0}\); b value track of input u
We select system (80) for comparison. Choosing identical parameters and initial values can reflect the advantages of the controller. Unlike before, asymmetric output constraints are not considered. Therefore, the control law design [34] is
The outcomes are shown in Figs. 4, 5 and 6. The system responses to the trajectory in Fig. 4 do not consider asymmetric time-varying output limitations; it is evident that \(x_{1}\) exceeds the constraint range by about 1 s, reflecting the control rate in this paper. Although Figs. 4 and 5 ensure the stability of the nonlinear cascaded system, it breaks the time-varying output restrictions and exhibits wider response fluctuations. It is clear from comparing the figures mentioned above that the overall control method operates effectively.
5 Conclusion
We explored a group of nonlinear cascaded systems with output constraints and iISS inverse dynamics. To overcome the difficulty that non-holonomic systems are not stabilized by continuous feedback control, we designed a discontinuous time-invariant control law using input-state scaling transformation technology. The unmeasurable state was estimated by constructing a full-order observer with a gain derived from the Riccati matrix differential equation. A tan-type barrier Lyapunov function was introduced to handle asymmetric time-varying output constraints. Future work includes extending our results to cascaded systems with non-vanishing disturbances and output constraints, as well as achieving the stability of the cascaded system within the specified time.
Data Availability
The authors declare that all data analyzed during this paper are included in this article.
References
Manav, A.C., Lazoglu, I.: A novel cascade path planning algorithm for autonomous truck-trailer parking. IEEE Trans. Intell. Transp. Syst. 23(7), 6821–6835 (2021)
Zhang, Y.B., Wang, D., Peng, Z.H., Li, T., Liu, L.: Event-triggered ISS-modular neural network control for containment maneuvering of nonlinear strict-feedback multi-agent systems. Neurocomputing 377(11), 314–324 (2020)
Ding, S.H., Li, S.H., Li, Q.: Global uniform asymptotical stability of a class of nonlinear cascaded systems with application to a nonholonomic wheeled mobile robot. Int. J. Syst. Sci. 41(11), 1301–1312 (2010)
Chen, Z.Y., Huang, J.: A Lyapunov’s direct method for the global robust stabilization of nonlinear cascaded systems. Automatica 44(3), 745–752 (2008)
Ding, S.H., Li, S.H., Zheng, W.X.: Nonsmooth stabilization of a class of nonlinear cascaded systems. Automatica 48(10), 2597–2606 (2012)
Imura, J.I., Sugie, T., Yoshikawa, T.: Global robust stabilization of nonlinear cascaded systems. IEEE Trans. Autom. Control 39(5), 1084–1089 (1994)
Lendek, Z., Babuška, R., De Schutter, B.: Stability of cascaded fuzzy systems and observers. IEEE Trans. Fuzzy Syst. 17(3), 641–653 (2009)
Jankovic, M., Sepulchre, R., Kokotovic, P.V.: Constructive Lyapunov stabilization of nonlinear cascade systems. IEEE Trans. Autom. Control 41(12), 1723–1735 (1996)
Mazenc, F., Sepulchre, R., Jankovic, M.: Lyapunov functions for stable cascades and applications to global stabilization. IEEE Trans. Autom. Control 44(9), 1795–1800 (1999)
Lin, W., Qian, C.J.: Adaptive regulation of cascade systems with nonlinear parameterization. Int. J. Robust Nonlinear Control 12(12), 1093–1108 (2002)
Jiang, Z.P., Teel, A.R., Praly, L.: Small-gain theorem for ISS systems and applications. Math. Control Signal Syst. 7(2), 95–120 (1994)
Sontag, E.D., Wang, Y.: New characterizations of input to state stability. IEEE Trans. Autom. Control 41(9), 1283–1294 (1996)
Chen, Z.Y., Huang, J.: Global robust stabilization of cascaded polynomial systems. Syst. Control Lett. 47(5), 445–453 (2002)
Jiang, Z.P., Marcels, I.M.Y.: A small-gain control method for nonlinear cascaded systems with dynamic uncertainties. IEEE Trans. Autom. Control 42(3), 292–308 (1997)
Lin, W., Gong, Q.: A remark on partial-state feedback stabilization of cascade systems using small gain theorem. IEEE Trans. Autom. Control 48(3), 497–500 (2003)
Sontag, E.D.: Smooth stabilization implies coprime factorization. IEEE Trans. Autom. Control 34(4), 435–443 (1989)
Jiang, Z.P., Mareels, I.M.Y., Wang, Y.: A Lyapunov formulation of the nonlinear small-gain theorem for interconnected ISS systems. Automatica 32(8), 1211–1215 (1996)
Teel, A.R.: Connections between Razumikhin-type theorems and the ISS nonlinear small gain theorem. IEEE Trans. Autom. Control 43(7), 960–964 (1998)
Ahn, C.K.: Robust stability of recurrent neural networks with ISS learning algorithm. Nonlinear Dyn. 65(4), 413–419 (2011)
Sontag, E.D.: Comments on integral variants of ISS. Syst. Control Lett. 34(1–2), 93–100 (1998)
Jiang, Z.P., Mareels, I., Hill, D.J., Huang, J.: A unifying framework for global regulation via nonlinear output feedback: from ISS to iISS. IEEE Trans. Autom. Control 49(4), 549–562 (2004)
Ito, H.: State-dependent scaling problems and stability of interconnected iISS and ISS systems. IEEE Trans. Autom. Control 51(10), 1626–1643 (2006)
Ito, H., Jiang, Z.P.: Necessary and sufficient small gain conditions for integral input-to-state stable systems: a Lyapunov perspective. IEEE Trans. Autom. Control 54(10), 2389–2404 (2009)
Yu, X., Wu, Y.Q., Xie, X.J.: Reduced-order observer-based output feedback regulation for a class of nonlinear systems with iISS inverse dynamics. Int. J. Control 85(12), 1942–1951 (2012)
Burger, M., Guay, M.: Robust constraint satisfaction for continuous-time nonlinear systems in strict feedback form. IEEE Trans. Autom. Control 55(11), 2597–2601 (2010)
Mayne, D.Q., Rawlings, J.B., Rao, C.V., Scokaert, P.O.M.: Constrained model predictive control: stability and optimality. Automatica 36(6), 789–814 (2000)
Fuentes-Aguilar, R.Q., Chairez, I.: Adaptive tracking control of state constraint systems based on differential neural networks: a barrier Lyapunov function approach. IEEE Trans. Neural Netw. Learn. Syst. 31(12), 5390–5401 (2020)
Liu, Y.J., Tong, S.: Barrier Lyapunov functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints. Automatica 64, 70–75 (2016)
Chen, L., Wang, Q.: Prescribed performance-barrier Lyapunov function for the adaptive control of unknown pure-feedback systems with full-state constraints. Nonlinear Dyn. 95(3), 2443–2459 (2019)
Jin, X., Xu, J.X.: Iterative learning control for output-constrained systems with both parametric and nonparametric uncertainties. Automatica 49(8), 2508–2516 (2013)
Tee, K.P., Ge, S.S., Tay, E.H.: Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 45(4), 918–927 (2009)
Li, D.J., Li, J., Li, S.: Adaptive control of nonlinear systems with full state constraints using integral barrier Lyapunov functionals. Neurocomputing 186, 90–96 (2016)
Angeli, D., Sontag, E.D., Wang, Y.: A characterization of integral input-to-state stability. IEEE Trans. Autom. Control 45(6), 1082–1097 (2000)
Yu, J.B., Zhao, Y.: Global robust stabilization for nonholonomic systems with dynamic uncertainties. J. Frankl. Inst. 357(3), 1357–1377 (2020)
Lin, W., Pongvuthithum, R.: Global stabilization of cascade systems by \(C^{0}\) partial-state feedback. IEEE Trans. Autom. Control 47(8), 1356–1362 (2002)
Jiang, Z.P.: Robust exponential regulation of nonholonomic systems with uncertainties. Automatica 36(2), 189–209 (2000)
Gao, F.Z., Wu, Y.Q., Huang, J.C., Liu, Y.H.: Output feedback stabilization within prescribed finite time of asymmetric time-varying constrained nonholonomic systems. Int. J. Robust Nonlinear Conrol 31(2), 427–446 (2021)
Tee, K.P., Ren, B.B., Ge, S.S.: Control of nonlinear systems with time-varying output constraints. Automatica 47(11), 2511–2516 (2011)
Xi, Z.R., Feng, G., Jiang, Z.P., Cheng, D.Z.: Output feedback exponential stabilization of uncertain chained systems. J. Frankl. Inst. 344(1), 36–57 (2007)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China (62073187 and 62003148), and the Major Scientific and Technological Innovation Project in Shandong Province (2019JZZY011111).
Funding
This work was supported in part by the National Natural Science Foundation of China (62073187 and 62003148).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zou, F., Wu, K. & Wu, Y. Global robust stabilization for cascaded systems with dynamic uncertainties and asymmetric time-varying constraints. Nonlinear Dyn 111, 18969–18983 (2023). https://doi.org/10.1007/s11071-023-08867-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-023-08867-z