
Abstract
This paper investigates the event-driven observer-based output control of networked control systems. By introducing a tuning parameter and a weighting matrix, an extended event-driven threshold is proposed. To obtain the controller and observer gains in a convex manner, a constructive strategy is employed to extract the controller matrix coupled with Lyapunov variables and system matrices. Based on these approaches, a sufficient condition for the closed-loop system to be the global uniform ultimate boundedness is ensured in terms of linear matrix inequalities. The validity of the proposed method is illustrated via a numerical example.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Control systems utilizing a real-time network to exchange information among system components (sensors, actuators, controllers, etc.) are known as networked control systems (NCSs) [1, 2]. Owing to the advantages of quick and easy maintenance and low power consumption, NCSs have been applied widespread in manufacture plants, vehicles, aircraft, and so on [2–5]. Thus, numerous research results about NCSs are given in [6–12]. Regarding the data sampling method, it is noted that the time-driven mechanism is adopted in most of these works. In this paradigm, the sampled data are transmitted with a fixed rate, which is simplified for system analysis and implementation. However, once the adjacent transmission signals change marginally, it could lead to over-occupation of limited network bandwidth. To release the overloaded bandwidth, event-driven control has gained more and more attention and interests [13].
In event-driven communication mechanism, the signal transmission is determined by a predesigned-driven condition (also called event) instead of time. Consequently, this mechanism could mitigate the unnecessary data. As such, fruitful results based on different event-driven schemes are made in [5, 14–19]. Concretely speaking, in [14], a continuous triggered scheme is defined by calculating the error between the latest triggered state and the current state continuously. This manner is also used in output feedback systems [15, 16]. Nevertheless, this scheme needs a specialized hardware with a very high frequency to measure the system information. To cope with this deficiency, a discrete event-driven mechanism is developed in [5, 17]. With this mechanism, the system data are sampled periodically and the triggered condition is tested only at each sampling instant. Alternatively, by using the current system information to predict the next triggered time, the self-triggered scheme is proposed in [18, 19]. Based on the aforementioned mechanisms, most of them are focused on stability analysis and synthesis [15, 17, 20, 21], network-induced time delay and packet dropout [17, 22, 23], and network quantization [14, 24, 25]. Noticeably, a common hypothesis is that all system states are accessible. Unfortunately, this hypothesis is hard to realize since only system outputs or part of system states are accessible. Stimulated by this point, event-driven-based output feedback control has been a fascinated topic [15, 26–28]. For given dynamic output feedback controller, depending on the provided decentralized triggered mechanism, conditions for stability analysis and \({\mathcal {L}}_\infty \) performance are discussed in [26]. [27] develops a framework of dynamic-output-based event-driven control for uncertain NCSs with quantization. Event-triggered static output feedback \(H_{\infty }\) control with time-varying sampling is studied in [28]. The issue of event-triggered observer-based output feedback control of continuous-time linear systems is delivered in [15]. It is to note that the methods for controller synthesis in these results are nonconvex. Moreover, the driven threshold in some of them still has room for further improvement.
Inspired by the above discussions, the event-triggered observer-based output feedback control of NCSs is further investigated in this paper. Motivated by [15], an extended event-driven threshold is exploited firstly. The extended triggered threshold is regulated by a tuning parameter and a weighting matrix. Due to the weighting matrix, it is feasible to do the co-design of the event-driven scheme and observer-based output controller. Then the event-driven closed-loop system is expressed by a delay approach. To derive the event-driven controllers and observers via a convex way, a constructive approach [29] is employed to separate the coupling of control matrix and other variables. With the help of these strategies, a sufficient condition for the resulted closed-loop system to be the global uniform ultimate boundedness is established in the framework of linear matrix inequalities. Based on the established condition, some special cases are also discussed. Finally, a numerical example is presented to show the validity of the proposed method.
The structure of this paper is as follows: The problem statement and some preliminaries are formulated in Sect. 2. The event-driven observer-based output control is elaborated in Sect. 3. Section 4 provides a numerical example to illustrate the effectiveness of the proposed approach. Lastly, Sect. 5 concludes the paper.
Notation
Throughout the paper, the notation \(M{>}0\) \(({<}0)\) is used to represent that M is symmetric and positive (negative) definite. \({\mathbb {R}}^n\) is the n-dimensional Euclidean space, and \({\mathbb {R}}^{n\times m}\) is the set of all \(n\times m\) real matrices. The transpose of M is denoted by \(M^\mathrm{T}\). \(*\) stands for the entries of matrices implied by symmetry. The symbol \(\Vert \bullet \Vert \) represents the Euclidean norm. Then, \((M+M^\mathrm{T})\) is denoted by He(M). \(I_n\) and \(0_{n\times m}\) mean the identity block matrix and zero block matrix with appropriate dimensions, respectively. What is more, matrices, if not explicitly stated, are assumed to have compatible dimensions.
2 Problem statement and preliminaries
Consider the following linear system
where \(x(t)\,{\in }\,{\mathbb {R}}^n\) is the state vector, \(u(t)\,{\in }\, {\mathbb {R}}^m\) is control input, \(y(t)\,{\in }\,{\mathbb {R}}^q\) is the system output, and A, B, and C are system matrices with appropriate dimensions. Assume that system (1) is controlled over a network.
Due to the fact that only partial system state is accessible in practical engineering, a state observer is used to estimate the system state x(t) with the measured output y(t) modeled as below
where \(\hat{x}(t)\,{\in }\,{\mathbb {R}}^n\) means the observer state, L is the observer gain to be designed, and \(\tau _{t_k}\) is the communication delay.
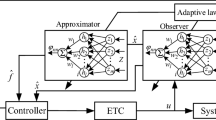
Thus, taking the limited capacity of the communication channels into account, an event-driven transmitter based on the estimated state, as depicted in Fig. 1, is constructed as
where \(e(i_kh)\,{=}\,\hat{x}(i_kh)-\hat{x}(t_kh)\) denotes the error between the observer state at the current sampling time \(i_kh\,{=}\,t_kh+lh (l\,{\in }\, {\mathbb {N}})\) and the observer state at the latest triggered time \(t_kh\); \(\Phi \) is a symmetric positive-definite weighting matrix; \(\gamma (t)\,{=}\,\sqrt{\beta \varepsilon ^{-\alpha t}+\varepsilon _0}\) is the error threshold with \(\varepsilon \,{>}\,1\), \(\beta \,{>}\,0\), \(0\,{\leqslant }\,\alpha \,{<}\,1\), \(\varepsilon _0\,{\geqslant }\,0\); and h denotes the sampling period.

Framework of an event-triggered NCS
Remark 1
The proposed event-driven mechanism (3) is an extended version of the scheme in [15]. On the one hand, a tuning parameter \(\beta \) related to \(\alpha \) is added to the exponent term as coefficient. The benefit could be obvious once \(\alpha \) is small. On the other hand, a weighting matrix \(\Phi \) is introduced to enable the co-design of the triggered mechanism and the desired controllers.
Then, an event-driven observer-based state feedback control law is formed as
where K is the control gain matrix to be designed later.
Until the novel triggered signal arrives at the actuator, the control input is generated by a zero-order holder (ZOH) with the holding time interval \(\Omega \,{=}\,[t_kh+\tau _{t_k}, t_kh+\tau _{t_k+1})\). The following section provides a detailed statement of the holding time \(\Omega \) of ZOH, which is divided into subsets \(\Omega _l\,{=}\,[i_kh+\tau _{i_k}, i_kh+h+\tau _{i_k+1})\), i.e., \(\Omega \,{=}\,\cup \,\Omega _l\), where \(i_kh\,{=}\,t_kh+lh\), \(l=0,\ldots ,t_{k+1}-t_k-1\) represents sampling time from the current triggered time \(t_kh\) to the next triggered time \(t_{k+1}h\). For \(l\,{=}\,t_{k+1}-t_k-1\), then \(\tau _{i_k+1}\,{=}\,\tau _{t_{k+1}}\), otherwise \(\tau _{i_k}\,{=}\,\tau _{t_k}\). Define \(\tau (t)\,{\triangleq }\, t-i_kh\) and \(\dot{\tau }(t)\,{=}\,1\), \(t\,{\in }\,\Omega _l\). Note that \(0\,{<}\,\tau (t)\,{<}\,h+\bar{\tau }\,{\triangleq }\, \tau _m\), where \(\bar{\tau }\) means the maximum allowable upper transmission delay bound.
Combing the state observer (2), control law (4), and ZOH, the resulted closed-loop system is described as
where \(\tilde{x}(t)\,{=}\,x(t)-\hat{x}(t)\) is the estimation error.
Defining \(\xi ^T(t)\,{=}\,\left[ {\begin{array}{c} x^T(t)\quad \tilde{x}^T(t)\end{array}} \right] ^T\), an augmented closed-loop system is obtained
where \(\bar{A}_1\,{=}\,\left[ {\begin{array}{cc} A &{} 0\\ 0 &{} A\end{array}} \right] \), \(\bar{A}_2\,{=}\,\left[ {\begin{array}{cc}BK &{} -BK\\ 0 &{} -LC\end{array}} \right] \), and \(\bar{B}\,{=}\left[ {\begin{array}{cc} -BK\\ 0 \end{array}} \right] \).
This study aims at designing an event-driven observer-based controller (4) such that the system (6) is global uniform ultimate boundedness. To this end, some technical lemmas are presented as follows.
Lemma 1
[30] For given positive integers p, q, a scalar \(\delta \) in the interval (0, 1), a given positive matrix R in \({\mathbb {R}}^{p}\), two matrices \(M_1\) and \(M_2\) in \({\mathbb {R}}^{p\times q}\), define, for all vector \(\vartheta \) in \({\mathbb {R}}^{q}\), the function \(\mathfrak {I}(\delta ,R)\) given by:
Then, if there exists a matrix U in \({\mathbb {R}}^{p\times p}\) such that \(\left[ {\begin{array}{cc} R &{} U^{T}\\ * &{} R\end{array}} \right] ^{{\phantom {\frac{1}{1}}}}>0\), the following inequality holds
Lemma 2
[31] Given matrices D, E(t), and F of appropriate dimensions with E(t) satisfying \(E^T(t)E(t){\leqslant }\, I\), for any \(\epsilon \,{>}\,0\) the following inequality holds
Lemma 3
[32] The following two inequalities are equivalent:
-
(a)
There exists a symmetric and positive-definite matrix P satisfying
$$\begin{aligned} \left[ {\begin{array}{cc} -P &{} A^T\\ A &{} -P^{-1}\end{array}} \right] <0; \end{aligned}$$(10) -
(b)
There exists a symmetric and positive-definite matrix P and matrix Y satisfying
$$\begin{aligned} \left[ {\begin{array}{cc} -P &{} (YA)^T\\ YA &{} He(-Y)+P\end{array}} \right] <0. \end{aligned}$$(11)
3 Main results
In Sect. 3, a sufficient condition for the closed-loop system (6) is established to guarantee the considered NCSs to be global uniform ultimate boundedness in the framework of linear matrix inequalities firstly. Based on the obtained main result, some special cases are presented subsequently.
Theorem 1
Consider the closed-loop system (6) under the driven scheme (3) with \(\varepsilon \), \(\alpha \), \(\beta \), \(\tau _m\,{>}\,0\). For given decay rate \(\sigma \), if there exist matrices \(P_1\,{>}\,0\), \(P_2\,{>}\,0\), \(\Phi \,{>}\,0\), \(R_1\,{>}\,0\), \(\Psi \,{>}\,0\), J and \(U_i\ (i=1,2,3,4)\), matrices Z, N, Q with appropriate dimensions such that
where
then the closed-loop system (6) is global uniform ultimate bounded and exponentially converges to the bounded region
Moreover, the state feedback controller gain is \(K\,{=}Z^{-1}N\) and the observer gain is \(L\,{=}\,P_2^{-1}Q\).
Proof
Choose a Lyapunov function as
where \(P=\left[ {\begin{array}{cc}P_1 &{} 0\\ 0 &{} P_2\end{array}} \right] \), \(R=\left[ {\begin{array}{cc}R_1 &{} 0\\ 0 &{} P_2\end{array}} \right] \).
Taking the time derivative of (14) with \(\dot{\tau }(t)\,{=}\,1\) yields
Based on (3), it leads to
The following step separates the integral term \(-{\text{ e }}^{-\sigma \tau _m}\int ^t_{t-\tau _m}\dot{\xi }^T(s)R\dot{\xi }(s){\text{ d }}s\) into two parts taken over the intervals \([t- \tau (t), t]\) and \([t-\tau _m, t-\tau (t)]\). Utilizing Jensen’s inequality [33], one has
where
For a matrix \(U\,{=}\,\left[ {\begin{array}{cc} U_1 &{} U_2\\ U_3 &{} U_4\end{array}} \right] \) satisfying \(\Psi \,{>}\,0\), Lemma 1 guarantees that
where \(\varphi \,{=}\, \frac{{\text{ e }}^{-\sigma \tau _m}}{\tau _m}\).
Substituting (18) into (16) yields
where
On the other hand, applying Schur complement to (12) leads to
In terms of Lemma 3, (20) can be rewritten as
where \(\Theta _{23}\,{=}\,\left[ {\begin{array}{ccc} -Z^{-1}N&Z^{-1}N&-Z^{-1}N \end{array}}\right] ^T.\)
Using Schur complement to (21) once more time, one can get
which is also equivalent to
Based on Lemma 2, the following inequality holds
From the above fact and \(L\,{=}\,P_2^{-1}Q\), (23) is reformed as
Left- and right-multiplying (25) with \(\Lambda \) and \(\Lambda ^T\), one has
where
Thus, (26) implies that \(\zeta ^T(t)(\Pi +\Upsilon ^TR^{-1} \Upsilon )\zeta (t)\,{<}\,0\) holds for any nonzero \(\zeta (t)\), which combined with (19) gives that
Applying comparison lemma [34] to (27) leads to
Noting that \(\gamma ^2(t)\,{=}\,\beta \varepsilon ^{-\alpha t}+\varepsilon _0\,{=}\,\beta {\text{ e }}^{-(\alpha \ln \varepsilon )t}+\varepsilon _0\), (28) is rewritten as
The following three cases will be taken into account.
If \(\sigma -\alpha \ln \varepsilon \,{=}\,0\), one has
If \(\sigma -\alpha \ln \varepsilon \,{>}\,0\), one can get
If \(\sigma -\alpha \ln \varepsilon \,{<}\,0\), thus, \({\text{ e }}^{(\sigma -\alpha \ln \varepsilon )t}\,{<}\,1\), we have
Summarizing the above three cases, one can see that the global uniform ultimate boundedness of the closed-loop system (6) is satisfied and the states exponentially converge to the bounded region (13). \(\square \)
Remark 2
Compared with [15], this paper utilizes not only \(\xi (t-\tau (t))\) but also \(\xi (t-\tau _m)\) to get the obtained result more effective. Further, the upper bound of transmission delay in [15] is defined as the sampling period h, but it could be optimized without the constraint of h in the proposed method.
Remark 3
To get the closed-loop system (6) to be global uniform ultimate bounded, in [15], the state feedback controller gain and the observer gain are required to be given in advance. Therefore, they are independent on the driven scheme. Nevertheless, with the introduced weighting matrix, a co-design of the event-triggered mechanism and observer-based controller is given in Theorem 1 by a convex method.
Once system states are available, the event-driven scheme and the resulting closed-loop system are reformulated, respectively, as
Based on the obtained result given in Theorem 1, the corresponding result is given below.
Corollary 1
Consider the closed-loop system (30) under the trigger scheme (29) with \(\varepsilon \), \(\alpha \), \(\beta \), \(\tau _m>0\). For given decay rate \(\sigma \), if there exist matrices \(P_1>0\), \(\Phi >0\), \(R_1>0\), \(\left[ {\begin{array}{cc} R_1 &{} U_1\\ U_1^T &{} R_1 \end{array}} \right] >0\), \(J_1\) and \(U_1\), matrices Z, N with appropriate dimensions such that
where
then the solutions of system (30) with the state feedback gain \(K=Z^{-1}N\) are globally uniformly ultimately bounded and exponentially converge to the region
Assuming that all system states are known, the event-triggered level is chosen as
which can be obtained by replacing \(\gamma ^2(t)\) in (29) with \(\delta x^T(i_kh)\Phi x(i_kh)\). In this scenario, the driven level is the same as that of [21]. Adopting the similar derivation, a sufficient condition for the system (30) to be asymptotically stable is derived in the following corollary.
Corollary 2
Consider the closed-loop system (30) under the trigger scheme (33) with \(\delta \,{\in }\,[0,1)\), \(\tau _m\,{>}\,0\). For given decay rate \(\sigma \), if there exist matrices \(P_1\,{>}\,0\), \(\Phi \,{>}\,0\), \(R_1\,{>}\,0\), \(\left[ {\begin{array}{cc} R_1 &{} U_1\\ U_1^T &{} R_1 \end{array}} \right] \,{>}\,0\), \(J_1\) and \(U_1\), matrices Z, N with appropriate dimensions such that
where
then the system (30) with state feedback control gain \(K\,{=}\,Z^{-1}N\) is asymptotically stable.
4 Numerical example
Example 1
Consider system (1) with
Controller gain K, observer gain L, \(\tau _m\), and weighting matrix \(\Phi \) calculated by Theorem 1 are shown in Table 1. Based on Table 1, one can see that the derived \(\tau _m\) decreases as the given \(\sigma \) increases.
Thus, for given \(\tau _m\,{=}\,0.5\), \(\sigma \,{=}\,0.2\), the controller and observer gains and weighting matrix are also obtained as \(K\,{=}\,[-0.4702\, -0.2108]\), \(L\,{=}\,[0.7743\,0.2886]^T\), and \(\Phi \,{=}\,\left[ {\begin{array}{cc} 10.3975 &{} 1.3896\\ 1.3896 &{} 7.9191\end{array}} \right] \). Via the obtained parameters, the simulation is performed with the initial state \(x(0)\,{=}\,[1;\,-1]\), \(\varepsilon \,{=}\,e\), \(\alpha \,{=}\,0.5\), \(\beta \,{=}\,1\), \(\varepsilon _0\,{=}\,0.01\), and \(h\,{=}\,0.01\)s. Therefore, the corresponding the closed-loop system state trajectories, \(\Vert \Phi ^{1/2} e(i_kh)\Vert \), and transmission intervals are depicted in Figs. 2, 3, and 4, respectively. From these figures, it is obvious that the closed-loop system is global uniform ultimate bounded and converges to the prescribed threshold. It is also found that, for a given \(\sigma \), minor changes of system states could lead to less triggered transmission.

Closed-loop state responses

\(\Vert \Phi ^{1/2} e(i_kh)\Vert \)

Transmission intervals
To show the effectiveness of the proposed triggered threshold, under the initial state \(x(0)\,{=}\,[1\,-1]^T\) and the same K, L, \(\Phi \) calculated by \(\tau _m\,{=}\,0.5\), \(\sigma \,{=}\,0.2\), and \(\varepsilon \,{=}\,e\), \(\alpha \,{=}\,0.06\), \(\varepsilon _0\,{=}\,0.01\), three driven levels are considered by choosing \(\beta \,{=}\,1\) and \(\Phi \,{=}\,I\) in [15] (Case I) and \(\beta \,{=}\,0.3\) in scheme (3) (Case II) and \(\beta \,{=}\,0.01\) in scheme (3) (Case III). Then, the closed-loop system state responses, \(\Vert \Phi ^{1/2} e(i_kh)\Vert \), and transmission intervals of the three cases are shown in Figs. 5, 6, 7, 8.

State responses of \(x_1(t)\) for three cases

State responses of \(x_2(t)\) for three cases

Curves of \(\Vert \Phi ^{1/2} e(i_kh)\Vert \) for three cases

Transmission intervals for three cases
Figures 5 and 6 show that the smaller the \(\beta \) is, the better the system performance will be. Figures 7 and 8 demonstrate that the smaller the \(\beta \), the more the cost consumed. Therefore, these figures also verify the fact a trade-off should be made between system performance and cost. Namely, if the goal is to obtain better performance, one just needs to decrease \(\beta \). If the attention is paid on saving cost, this goal can be realized by increasing \(\beta \).
5 Conclusions
This paper is concerned with the event-driven observer-based output control of NCSs. An extended triggered scheme is proposed, and a sufficient condition for the closed-loop system to be global uniform ultimate boundedness is established in the framework of linear matrix inequalities. The validity of the proposed method is verified by a numerical example. How to balance the triggered level and system performance will be studied in future.
References
Gupta, R.A., Chow, M.Y.: Networked control system: overview and research trends. IEEE Trans. Ind. Electron. 57, 2527–2535 (2010)
Yang, T.: Networked control system: a brief survey. IEE Proc.-Control Theory Appl. 153, 403–412 (2006)
Walsh, G.C., Ye, H., Bushnell, L.G.: Stability analysis of networked control systems. IEEE Trans. Control Syst. Technol. 10, 438–446 (2002)
Raji, R.S.: Smart networks for control. IEEE Spectr. 31, 49–55 (1994)
Zhang, H., Peng, C., Zhang, J., Zhang, C.: Event-triggered control in networked control systems: a survey. IEEE 27th Chinese Control and Decision Conference, pp. 3092–3097 (2015)
Shi, P.: Filtering on sampled-data systems with parametric uncertainty. IEEE Trans. Autom. Control 43, 1022–1027 (1998)
Fridman, E., Seuret, A., Richard, J.P.: Robust sampled-data stabilization of linear systems: an input delay approach. Automatica 40, 1441–1446 (2004)
Fridman, E.: A refined input delay approach to sampled-data control. Automatica 46, 421–427 (2010)
Gao, H., Wu, J., Shi, P.: Robust sampled-data \(H_{\infty }\) control with stochastic sampling. Automatica 45, 1729–1736 (2009)
Yue, D., Han, Q., Peng, C.: State feedback controller design for networked control systems. IEEE Trans. Circuits Syst. 51, 640–644 (2004)
Han, Q.: A discrete delay decomposition approach to stability of linear retarded and neutral systems. Automatica 45, 517–524 (2009)
Zhang, H., Yang, D., Chai, T.: Guaranteed cost networked control for T-S fuzzy systems with time delays. IEEE Trans. Syst., Man, Cybern., Part C: Appl. Rev. 37, 160–172 (2007)
Arzen, K.E.: A simple event-based PID controller. Proc. IFAC World Congr. 18, 423–428 (1999)
Tabuada, P.: Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 52, 1680–1685 (2007)
Zhang, J., Feng, G.: Event-driven observer-based output feedback control for linear systems. Automatica 50, 1852–1859 (2014)
Astrom, K.J.: Event Based Control. Analysis and Design of Nonlinear Control Systems. Springer, Heidelberg (2008)
Peng, C., Yang, T.: Event-triggered communication and \(H_{\infty }\) control co-design for networked control systems. Automatica 49, 1326–1332 (2013)
Gommans, T., Antunes, D., Donkers, T., Tabuada, P., Heemels, M.: Self-triggered linear quadratic control. Automatica 50, 1279–1287 (2014)
Peng, C., Han, Q.: On designing a novel self-triggered sampling scheme for networked control systems with data losses and communication delays. IEEE Trans. Ind. Electron. 63, 1239–1248 (2016)
Lunze, J., Lehmann, D.: A state-feedback approach to event-based control. Automatica 46, 211–215 (2010)
Yue, D., Tian, E., Han, Q.: A delay system method for designing event-triggered controllers of networked control systems. IEEE Trans. Autom. Control 58, 475–481 (2013)
Kim, D.S., Lee, Y.S., Kwon, W.H., Park, H.S.: Maximum allowable delay bounds of networked control systems. Control Eng. Pract. 11, 1301–1313 (2003)
Xiong, J., Lam, J.: Stabilization of linear systems over networks with bounded packet loss. Automatica 43, 80–87 (2007)
Li, L., Wang, X., Lemmon, M.: Stabilizing bit-rates in quantized event triggered control systems. Proceedings of the 15th ACM International Conference on Hybrid Systems: Computation and Control, pp. 245–254 (2012)
Hu, S., Yue, D.: Event-triggered control design of linear networked systems with quantizations. ISA Trans. 51, 153–162 (2012)
Donkers, M.C.F., Heemels, W.P.M.H.: Output-based event-triggered control with guaranteed-gain and improved and decentralized event-triggering. IEEE Trans. Autom. Control 57, 1362–1376 (2012)
Yu, H., Antsaklis, P.J.: Event-triggered output feedback control for networked control systems using passivity: achieving \({\cal L}_2\) stability in the presence of communication delays and signal quantization. Automatica 49, 30–38 (2013)
Peng, C., Zhang, J.: Event-triggered output-feedback \(H_{\infty }\) control for networked control systems with time-varying sampling. IET Control Theory Appl. 9, 1384–1391 (2015)
Shen, M., Fei, S.: A constructive method to static output stabilisation of Markov jump systems. Int. J. Control 88, 990–1000 (2015)
Park, P., Ko, J.W., Jeong, C.: Reciprocally convex approach to stability of systems with time-varying delays. Automatica 47, 235–238 (2011)
Wang, Y., Xie, L., de Souza, C.E.: Robust control of a class of uncertain nonlinear systems. Syst. Control Lett. 19, 139–149 (1992)
de Souza, C.E.: Robust stability and stabilization of uncertain discrete-time Markovian jump linear systems. IEEE Trans. Autom. Control 51, 836–841 (2006)
Gu, K., Chen, J., Kharitonov, V.L.: Stability of Time-Delay Systems. Birkhauser, Boston (2003)
Khalil, H.K.: Nonlinear Systems, 3rd edn. Prentice Hall, New Jewsey (2002)
Acknowledgments
The authors would like to thank the editor, the associate editor and the reviewers for their valuable comments and suggestions which help to significantly improve the quality and presentation of this paper. This work was supported in part by the National Natural Science Foundation of China under Grant 61403189, in part by the Natural Science Foundation of Jiangsu Province of China under Grant BK20130949, in part by the Doctoral Foundation of Ministry of Education of China under Grant 20133221120012, in part by the Jiangsu Postdoctoral Science Foundation under Grant1401015B, in part by the China Postdoctoral Science Foundation under Grant 2015M570397, in part by the peak of six talents in Jiangsu Province under Grant 2015XXRJ-011, in part by the MCCSE2015A03, in part by the Jiangsu Government Scholarship for Overseas Studies JS-2014-046.
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Yan, S., Shen, M. & Zhang, G. Extended event-driven observer-based output control of networked control systems. Nonlinear Dyn 86, 1639–1648 (2016). https://doi.org/10.1007/s11071-016-2982-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-2982-z