
Abstract
In this paper, we show that a state feedback method, which has successfully been used to control unstable steady states or periodic orbits, provides a tool to control the Hopf bifurcation for a novel congestion control model, i.e., the exponential RED algorithm with a single link and single source. We choose the gain parameter as the bifurcation parameter. Without control, the bifurcation will occur early; meanwhile, the model can maintain a stationary sending rate only in a certain domain of the gain parameter. However, outside of this domain the model still possesses a stable sending rate that can be guaranteed by the state feedback control, and the onset of the undesirable Hopf bifurcation is postponed. Numerical simulations are given to justify the validity of the state feedback controller in the bifurcation control.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the past decades, we have witnessed a rapidly growing interest of bifurcation control due to its promising potential applications in various areas [1]: the prevention of voltage collapse in electric power systems, the stabilization of rotating stall and surge in axial flow compressors, the regulation of human heart rhythms and neuronal activity behavior, the elimination of seizing activities in human cerebral cortex, and so on. In general, bifurcation control refers to the control of bifurcation properties of nonlinear dynamic systems, thereby resulting in some desired output behaviors of the systems, such as delaying the onset of an inherent bifurcation, stabilizing an unstable bifurcated solution or branch, and changing the critical values of an existing bifurcation [2]. Various bifurcation control approaches have been proposed in the literature [3–10]. Particularly, for the problem of relocating an inherent Hopf bifurcation, a dynamic state feedback control law incorporating a washout filter was proposed [3]. Later, the state feedback scheme was successfully developed to control Hopf bifurcations of autonomous systems [6, 10]. However, much less is known in the case of applying the state feedback to control bifurcations arising from time-delayed systems. In this paper, the state feedback is adopted to control Hopf bifurcations of a time-delayed congestion control model.
Internet congestion control is an algorithm to regulate the sending rates of the sources such that high network utilization, small amounts of queuing delay, and some degree of fairness among users are obtained, so as to avoid congestion collapse. The whole Internet congestion and avoidance mechanism is a combination of the end-to-end TCP congestion control mechanism [11, 12] at the end hosts and the queue management mechanism at the routers. The basis of TCP congestion control lies in the Additive Increase Multiplicative Decrease (AIMD) mechanism that halves the congestion window for every window containing a packet loss, and increases the congestion window by roughly one segment per round trip time (RTT) otherwise [13]. The queue management mechanism is meant to control the congestion level at each router through different kinds of Active Queue Management (AQM) mechanisms, e.g., Drop Tail [12], Random Early Detection (RED) [14], Random Early Marking (REM) [15], Virtual Queue (VQ) [16], and Adaptive Virtual Queue (AVQ) [17]. The stability, bifurcation, and control of the congestion control algorithm in the Internet have been the focus of intense research in the last few years [18–31].
The exponential RED algorithm model with a single link and single source can be described by
where \(x(t)\) is the sending rate of the source, \(p(t)\) is the loss probability function, \(\tau >0\) is the RTT, \(k>0\) is a decay factor, \(c>0\) is the link capacity, and \(\beta >0\) is a gain parameter. It is easy to see that system (1) involves delay-dependent parameters, which make the analysis more complex.
In the past few years, many authors have studied system (1) on the bifurcation and control [24, 26, 28]. By means of the delay \(\tau \) [24] or gain parameter \(\beta \) [28] as the bifurcation parameter, the stability and Hopf bifurcation were investigated for system (1). It was found that when the delay \(\tau \) or gain parameter \(\beta \) exceeds a critical value, the congestion control system (1) may lose its stability and undergo a Hopf bifurcation, that is to say, the stationary sending rate cannot be guaranteed, which is not desirable. Thus, the study of bifurcation control for congestion control systems is of significance. A time-delayed feedback scheme was applied to control the Hopf bifurcation for system (1). It was shown that under the control, one can postpone the undesirable onset of the critical value of the delay \(\tau \) and thus insure a stationary data sending rate for a larger delay.
Although the control of bifurcation has already been discussed in various congestion control systems [19, 20, 23, 26, 30], the control schemes used in these literatures are all the time-delayed feedback. The delayed feedback law may have some potential disadvantages such as requiring quite a lot of knowledge about the system state some time ago and making the dynamics take place in infinite-dimensional phase spaces. Therefore, it is needed to design a new control law that can achieve the goal of bifurcation control. In this paper, we will propose a state feedback scheme to control the Hopf bifurcation for system (1). It will be shown that the state feedback controller can increase the critical value of the Hopf bifurcation of the gain parameter \(\beta \), thereby guaranteeing a stationary sending rate for large gain parameter values.
The rest of the paper is organized as follows. In the next section, the main results for the Hopf bifurcation of model (1) obtained in [28] are summarized. In Sect. 3, we will introduce the bifurcation control for model (1) under the state feedback control. To verify the theoretical analysis, numerical simulations are carried out for an example in Sect. 4. The paper is finished by conclusions presented in Sect. 5.
2 Stability and bifurcation of uncontrolled system (1)
In this section, the results of the stability and Hopf bifurcation for system (1), obtained in [28], are summarized here.
System (1) has a non-zero equilibrium \(E^*(x^*,p^*)\), where
Remark 1
\(p^{*}\) explicitly depends on the delay \(\tau \), which makes the analysis about the equilibrium \(E^*(x^*,p^*)\) not trivial.
Theorem 1
([28]) For each fixed \(\tau >0\), the non-zero equilibrium \(E^{*}(x^{*}, p^{*})\) of system (1) is asymptotically stable when \(\beta \in (0,\beta _0)\), and unstable when \(\beta >\beta _0\).
Here,
and
is the root of the equation
Figure 1 is the bifurcation curve in the parameter plane \((\tau ,\beta )\).

The curve of \(\beta _0\) depending on \(\tau \) divides the first quadrant of \((\tau ,\beta )\)-plane into two regions: linear stable region and unstable region. This is Fig. 2 in Hu and Huang [28]
Theorem 2
([28]) For system (1), a Hopf bifurcation occurs from its non-zero equilibrium, \(E^{*}\), when the gain parameter, \(\beta \), passes through the critical value, \(\beta _0\), where \(\beta _0\) is defined by (3)–(5).
Theorem 3
([28]) The Hopf bifurcation in the exponential RED algorithm model (1) is determined by the parameters \(\mu _2,~\nu _2,~T_2\), where \(\mu _2\) determines the direction of the Hopf bifurcation: if \(\mu _2>0~(\mu _2<0)\), then the Hopf bifurcation is supercritical (subcritical) and the bifurcating periodic solutions exist for \(\beta >\beta _0~(\beta <\beta _0)\); \(\nu _{2}\) determines the stability of the bifurcating periodic solutions: the bifurcating periodic solutions are stable (unstable) if \(\nu _{2}<0~(\nu _{2}>0)\); and \(T_2\) determines the period of the bifurcating periodic solutions: the period increases (decreases) if \(T_2>0~(T_2<0)\).
The parameters \(\mu _2,~\nu _2,~T_2\) are given by
The detailed derivation of the above formulas can be found in Sect. 3 in [28].
3 Control by state feedback
Many researchers have designed the various time-delayed feedback schemes to control the Hopf bifurcation in the Internet congestion control models [19, 20, 23, 26, 30]. However, the time-delayed feedback approach requires quite a lot of knowledge about the system state some time ago, which is not always straightforward to find in a real-life situation. On the other hand, a deep theoretical analysis of such control approach is a formidable task since the time delay causes the corresponding phase space to become infinitely dimensional.
To overcome the limitations mentioned above, we suggest a state feedback scheme to accomplish the control of the Hopf bifurcation arising from system (1). We propose a nonlinear state feedback controller for the first equation of model (1) as follows:
where \(\alpha _1, \alpha _2\), and \(\alpha _3\) are positive feedback gain parameters.
Remark 2
The controller (7) remains the equilibrium \(E^*(x^*,p^*)\) of system (1) unchanged. Thus, the bifurcation control can be realized without destroying the properties of the original system (1).
Remark 3
The linear term \(-\alpha _1(x(t)-x^*)\) is used only to relocate the onset of the Hopf bifurcation to a desired location, while the higher order terms \(-\alpha _2(x(t)-x^*)^2-\alpha _3(x(t)-x^*)^3\) can be used to regulate the properties of the Hopf bifurcation.
Remark 4
The nonlinear state feedback control (7) has the advantage of not requiring prior knowledge of anything but the natural \(x^*\) of system (1); so, it has been successfully used in quite diverse experimental contexts.
Remark 5
The state feedback scheme has been successfully used to control the Hopf bifurcation in various autonomous systems [3, 6, 10]. However, we first apply this scheme to a time-delayed system.
With the nonlinear state feedback controller (7), the controlled exponential RED algorithm model (1) becomes
3.1 Stability and existence of bifurcation for controlled system (8)
Let \(u_1(t)=x(t)-x^*, u_2(t)=p(t)-p^*\). Then, (8) becomes
Linearizing (9) about \((0,0)\) produces
which has the characteristic equation:
In what follows, we regard \(\beta \) as the bifurcation parameter to investigate the distribution of the roots to (11).
Lemma 1
If \(\alpha _1>0\), then there exists a minimum positive number \(\beta _0^c\) such that
-
(i)
(11) has a pair of purely imaginary roots \(\pm i\omega _0^c\) when \(\beta =\beta _0^c\).
-
(ii)
all the roots of (11) have negative real parts when \(\beta \in (0,\beta _0^c)\).
-
(iii)
\(\beta _0^c>\beta _0\), where \(\beta _0\) is defined by (3)–(5).
Here,
and
is the root of the equation
Proof
\((\mathrm i )\) If \(\lambda =\mathrm i \omega \) (\(\omega >0\)) is a pure imaginary solution of (11), it is straightforward to obtain that
Taking the ratio of the two equations of (15) yields (14). Solutions of (14) are the horizontal coordinates of the intersecting points between the curve \(y=\cot (\omega \tau )\) and the line \(y=\small \frac{1}{(\frac{2kc}{1+kc^2\tau ^2}+\alpha _1)\tau }\omega \tau \). There are infinite numbers of intersecting points for these two curves that are graphically illustrated in Fig. 2.
Let \(\omega _0^c\) satisfy (13) and be the root of (14) and define \(\beta _0^c\) as in (12). Then, \((\beta _0^c,\omega _0^c)\) is a solution of (15). Thus, \(\pm \mathrm i \omega _0^c\) is a pair of purely imaginary roots of (11) when \(\beta =\beta _0^c\). It is easily seen form Fig. 2 that \(\tau \omega _0^c\) is the minimum positive value among all horizontal coordinates of the intersecting points. So, \(\beta _0^c\) is the first value of \(\beta >0\) such that (11) has root appearing on the imaginary axis. The conclusion \((\mathrm i )\) follows.
\((\mathrm{ii })\) When \(\beta =0\), the root of (11) is
Let \(\lambda _2(\beta )\) be a root of (11) satisfying \(\lambda _2(0)=0\). We can obtain that
Thus, all roots of (11) have negative real parts when \(\beta \in (0,\beta _0^c)\). The conclusion \((\mathrm{ii })\) follows.
\((\mathrm{iii })\) It is clear from Fig. 2 that \(\tau \omega _0\) is the horizontal coordinate of the intersecting point between the curve \(y=\cot (\omega \tau )\) and the line \(y=\frac{1}{\frac{2kc}{1+kc^2\tau ^2}\tau }\omega \tau \), while \(\tau \omega _0^c\) is the horizontal coordinate of the intersecting point between the curve \(y=\cot (\omega \tau )\) and the line \(y=\frac{1}{(\frac{2kc}{1+kc^2\tau ^2}+\alpha _1)\tau }\omega \tau \).
If \(\alpha _1>0\) holds, we have \(\frac{1}{\frac{2kc}{1+kc^2\tau ^2}\tau }>\frac{1}{(\frac{2kc}{1+kc^2\tau ^2}+\alpha _1)\tau }\). Therefore, \(\tau \omega _0^c>\tau \omega _0\), i.e., \(\omega _0^c>\omega _0\). From the definitions of \(\beta _0\) and \(\beta _0^c\) in (3) and (12), respectively, we can obtain that \(\beta _0^c\) is larger than \(\beta _0\). The conclusion \((\mathrm{iii })\) follows. Then the proof is completed. \(\square \)

The illustration for intersecting points between the curve \(y=\cot (\omega \tau )\) and the line \(y=\frac{1}{\frac{2kc}{1+kc^2\tau ^2}\tau }\omega \tau \) or the curve \(y=\frac{1}{(\frac{2kc}{1+kc^2\tau ^2}+\alpha _1)\tau }\omega \tau \)
Remark 6
If the controller \(u\) is removed from the controlled system (8), i.e., \(\alpha _1=\alpha _2=\alpha _3=0\), then (12) can be identical with the expression of \(\beta _0\) in Theorem 1. Therefore, \(\beta _0\) in Theorem 1 is a special case of \(\beta _0^c\) in (12) in the absence of the control.
In the following, we will show that the transversality condition of the Hopf bifurcation is also satisfied.
Lemma 2
Let \(\lambda (\beta )=\rho (\beta )+i\omega (\beta )\) be the root of (11) near \(\beta =\beta _0^c\) satisfying \(\rho (\beta _0^c)=0, \omega (\beta _0^c)=\omega _0^c\). Suppose that \(\alpha _1>0\) holds. Then,
Proof
Differentiating (11) on \(\beta \) and applying the implicit function theorem, we have
and hence
Since \(\lambda (\beta _0^c)=\mathrm i \omega _0^c\), it is obvious that
Thus, we can obtain
and
Since \(\alpha _1>0\), it is clear that
This completes the proof. \(\square \)
From Lemma 2, we can obtain the following lemma.
Lemma 3
(14) has at least one root with positive real part when \(\beta >\beta _0^c\).
From Lemmas 1–3 and the Hopf bifurcation theorems for functional differential equations (FDEs) in [32], we have the following results.
Theorem 4
Let \(\alpha _1>0\), we have
-
(i)
when \(\beta \in (0,\beta _0^c)\), the non-zero equilibrium \(E^*\) of the controlled system (8) is locally asymptotically stable.
-
(ii)
when \(\beta >\beta _0^c\), the \(E^*\) of the controlled system (8) is unstable.
-
(iii)
when \(\beta =\beta _0^c\), the controlled system (8) exhibits a Hopf bifurcation at \(E^*\), where \(\beta _0^c>\beta _0\) is defined by (12)–(14), and the equilibrium \(E^*\) is kept unchanged.
Remark 7
Theorem 4 indicates that under the control (7), one can delay or advance the onset of \(\beta _0\) in Theorem 1 to \(\beta _0^c\) without changing the original equilibrium \(E^*\) by choosing an appropriate feedback gain parameter value of \(\alpha _1\). Thus, if one only needs to change the onset of the Hopf bifurcation, a linear state feedback control with the parameter \(\alpha _1\) is sufficient.
Remark 8
The stability domain of the original model (1) can be extended from \(S_1\) to \(S_1\cup S_2\) under the state feedback control (7) (see Fig. 3). Therefore, one can guarantee a stationary sending rate for large parameter values, which benefits the decongestion.

The curves of \(\beta _0\) and \(\beta _0^c\) depending on \(\tau \) divide the first quadrant of \((\tau ,\beta )\)-plane into three regions, \(S_1, S_2\), and \(S_3\). For the uncontrolled system (1), \(S_1\) is a stable region, and \(S_2\cup S_3\) is an unstable region. For the controlled system (8), \(S_1\cup S_2\) is a stable region, and \(S_3\) is an unstable region
3.2 Direction and stability of the Hopf bifurcation for controlled system (8)
Next, we will study the properties of the Hopf bifurcation of the controlled system (8) by the center manifold and normal form theories [33].
Applying Taylor expansion to the right-hand side of system (8) at the equilibrium, \(E^*\), we have
where
For convenience, let \(\beta =\beta _0^c+\mu \) and \(u(t)=(u_1(t),u_2(t))^T\), where \(\beta _0^c\) is defined by (12)–(14) and \(\mu \in R\); then system (17) can be written in a FDE in \(C=C([-\tau ,0],R^{2})\) as
where \(u_{t}(\theta )=u(t+\theta )\in C\), and \(L_{\mu }:C\rightarrow R^2, F:R \times C\rightarrow R^2\) are given, respectively, by
and
where \(\phi (\theta )=(\phi _{1}(\theta ), \phi _{2}(\theta ))^{T}\in C\), and
By the Riesz representation theorem, there exists a function \(\eta (\theta ,\mu )\) of bounded variation for \(\theta \in [-\tau ,\ 0]\), such that
which can be satisfied by choosing
where \(\delta \) is the Dirac delta function.
For \(\phi \in C^{1}([-\tau ,0],R^2)\), define
and
Then, system (18) is equivalent to
where \(u_{t}(\theta )=u(t+\theta )\) for \(\theta \in [-\tau ,0]\).
For \(\psi \in C([0,\tau ],(R^2)^*)\), define
and a bilinear inner product
where \(\eta (\theta )=\eta (\theta ,0)\). Then, \(A(0)\) and \(A^{*}\) are adjoint operators.
In order to determine the Poincare normal form of the operator \(A(0)\), we need to calculate the eigenvector \(q\) of \(A(0)\) corresponding to the eigenvalue \(\mathrm{i }\omega _{0}^c\) and the eigenvector \(q^{*}\) of \(A^{*}\) corresponding to the eigenvalue \(-\mathrm{i }\omega _{0}^c\). We can easily verify that
is the eigenvector of \(A(0)\) corresponding to the eigenvalue \(\mathrm{i }\omega _{0}^c\), and
is the eigenvector of \(A^{*}\) corresponding to \(-\mathrm{i }\omega _{0}^c\).
By (22), we get
Thus, we can choose
such that \(\langle q^{*}(s),q(\theta )\rangle =1\).
In the following, we apply the ideas in Hassard et al. [33] to compute the coordinates describing the center manifold \(C_{0}\) at \(\mu =0\). Let \(u_{t}\) be the solution of (21) when \(\mu =0\). We define
On the center manifold \(C_{0}\), we have
where
\(z\) and \(\bar{z}\) are local coordinates for center manifold \(C_{0}\) in the direction of \(q^{*}\) and \(\overline{q^{*}}\). Note that \(W\) is real if \(u_{t}\) is real. We only consider real solution. For the solution \(u_{t}\in C_{0}\) of (21), since \(\mu =0\), we have
We rewrite this equation as
with
By (23), we have \(u_{t}(\theta ) \!=\! (u_{1t}(\theta ),u_{2t}(\theta ))^T \!=\!W(t,\theta ) +zq(\theta )+\bar{z}\bar{q}(\theta )\) and \(q(\theta ) \!=\! (1,\gamma )^T\exp (\mathrm{i }\omega _{0}^c\theta )\), and then
It follows together with (20) that
Comparing the coefficients with (26), we have
In order to determine \(g_{21}\), in the sequel, we need to compute \(W_{20}(\theta )\) and \(W_{11}(\theta )\). From (21) and (23), we have
where
On the other hand, note that on the center manifold \(C_{0}\) near to the origin,
This, together with (28) and (29), reads to
By (28), we know that for \(\theta \in [-\tau ,0)\),
Comparing the coefficients with (29) gives that
It follows from (30) that
Noticing that \(q(\theta )=(1,\gamma )^T\exp (\mathrm{i }\omega _{0}^c\theta )\), we have
where \(E_{1}\) and \(E_{2}\) are constant vectors.
In what follows, we shall seek appropriate \(E_{1}\) and \(E_{2}\). From
we obtain
and
where
From (30) and the definition of \(A(0)\), we have
Substituting (33)–(35) into (36) and noticing that
and
we can obtain
Therefore, each \(g_{ij}\) in (27) has been expressed in terms of the parameters and the delay given in system (8). Furthermore, we can compute the following quantities:
Now, the main results of this section are summarized as follows.
Theorem 5
The Hopf bifurcation exhibited by the controlled exponential RED algorithm model (8) is determined by the parameters \(\mu _2^c,\nu _2^c,T_2^c\), where \(\mu _2^c\) determines the direction of the Hopf bifurcation: if \(\mu _2^c>0~(\mu _2^c<0)\), then the Hopf bifurcation is supercritical (subcritical) and the bifurcating periodic solutions exist for \(\beta >\beta _0^c~(\beta <\beta _0^c)\); \(\nu _{2}^c\) determines the stability of the bifurcating periodic solutions: the bifurcating periodic solutions are stable (unstable) if \(\nu _{2}^c<0~(\nu _{2}^c>0)\); and \(T_2^c\) determines the period of the bifurcating periodic solutions: the period increases (decreases) if \(T_2^c>0~(T_2^c<0)\).
Remark 9
Theorem 5 shows that one may choose appropriate values of the parameters \(\alpha _1, \alpha _2\), and \(\alpha _3\) to change the values of \(\mu _2,~\nu _2,~T_2\) in Theorems 3 in order to control the properties of the Hopf bifurcation of system (1).
4 Numerical simulations
To verify the effectiveness of the proposed control scheme, numerical results are employed in this section.
For a consistent comparison, the same model (1), used in [28], is discussed, with \(c=1, k=0.8\), and \(\tau =5\). From (2), the uncontrolled system (1) has a unique non-zero equilibrium \(E^*=(1, 0.0476)\). It follows from Theorems 1–3 that
It is shown from Theorems 1 and 2 that when \(\beta <\beta _0\), the equilibrium \(E^*\) is stable (see Fig. 4), while as \(\beta \) is increased to pass through \(\beta _0, E^*\) loses its stability and a Hopf bifurcation occurs (see Figs. 5 and 6). Note that the periodic orbits are stable since \(\nu _2<0\), the bifurcating periodic solutions exist at least for the value \(\beta \) slightly larger than the critical value \(\beta _0\) since \(\mu _2>0\), and the period of the periodic solutions increases as \(\beta \) increases due to \(T_2>0\).

Waveform plot and phase portrait of the uncontrolled model (1) with \(c=1, k=0.8\), and \(\tau =5\). The equilibrium \(E^*\) is asymptotically stable, where \(\beta =0.38<\beta _0=0.4032\)

Waveform plot and phase portrait of the uncontrolled model (1) with \(c=1, k=0.8\), and \(\tau =5\). A periodic oscillation bifurcates from the equilibrium \(E^*\), where \(\beta =0.408>\beta _0=0.4032\)

Waveform plot and phase portrait of the uncontrolled model (1) with \(c=1, k=0.8\), and \(\tau =5\). A periodic oscillation bifurcates from the equilibrium \(E^*\), where \(\beta =0.435>\beta _0=0.4032\)
Next, we control the Hopf bifurcation based on the state feedback scheme.
Case 1 linear state feedback control.
It can be seen from Theorem 4 that for the linear state feedback control with an appropriate value of \(\alpha _1\), we can delay the onset of the Hopf bifurcation. For example, by choosing
we can apply Theorems 4 and 5 in Sect. 3 to obtain
Note that the controlled model (8) has the same equilibrium point as that of the original model (1), but the critical value \(\beta _0\) increases from \(0.4032\) to \(0.5157\), implying that the onset of the Hopf bifurcation is delayed.
Under the linear state feedback control with \(\alpha _1=0.02, \alpha _2=\alpha _3=0\), we choose \(\beta =0.435<\beta _0^c\), which is the same value as that used in Fig. 6. It can be concluded from Theorem 4 that instead of having a Hopf bifurcation, the equilibrium \(E^{*}\) of the controlled model (8) is stable, as shown in Fig. 7. However, the equilibrium \(E^{*}\) becomes unstable when \(\beta =0.54>\beta _0^c\), as shown in Fig. 8. Moreover, when \(\beta =0.6>\beta _0^c\), the equilibrium point \(E^{*}\) is also unstable, as shown in Fig. 9.

Waveform plot and phase portrait of the controlled model (8) with \(c=1, k=0.8, \tau =5\), and \(\alpha _1=0.02, \alpha _2=\alpha _3=0\). The equilibrium \(E^*\) is asymptotically stable, where \(0.4032=\beta _0<\beta =0.435<\beta _0^c=0.5157\)

Waveform plot and phase portrait of the controlled model (8) with \(c=1, k=0.8, \tau =5\), and \(\alpha _1=0.02, \alpha _2=\alpha _3=0\). A periodic oscillation bifurcates from the equilibrium \(E^*\), where \(\beta =0.54>\beta _0^c=0.5157\)

Waveform plot and phase portrait of the controlled model (8) with \(c=1, k=0.8, \tau =5\), and \(\alpha _1=0.02, \alpha _2=\alpha _3=0\). A periodic oscillation bifurcates from the equilibrium \(E^*\), where \(\beta =0.6>\beta _0^c=0.5157\)
It is shown that when \(\beta \) passes the critical value \(\beta _0^c=0.5157\), a Hopf bifurcation occurs (see Figs. 8 and 9). The periodic orbits are stable since \(\nu _2^c<0\). Since \(\mu _2^c>0\), the bifurcating periodic solutions exist at least for the value \(\beta \) slightly larger than the critical value \(\beta _0^c\). Since \(T_2^c>0\), the period of the periodic solutions increases as \(\beta \) increases.
If we choose a larger value of \(\alpha _1\), the exponential RED algorithm model may not have a Hopf bifurcation even for larger values of \(\beta \). For example, when choosing \(\alpha _1=0.3, \alpha _2=\alpha _3=0\), the equilibrium \(E^{*}\) of the controlled model (8) is stable if \(\beta <\beta _0^c=2.2846\), as shown in Fig. 10. This indicates that the linear state feedback control can delay the onset of the Hopf bifurcation.

Waveform plot and phase portrait of the controlled model (8) with \(c=1, k=0.8, \tau =5\), and \(\alpha _1=0.3, \alpha _2=\alpha _3=0\). The equilibrium \(E^*\) is asymptotically stable, where \(\beta =2.2<\beta _0^c=2.2846\)
Figure 11 shows a local bifurcation diagram in terms of the parameter \(\beta \) for model (1) without and with the linear state feedback control. Solid and dashed curves denote the stable and unstable solutions, respectively.

Local bifurcation diagram of model (1) without and with the linear state feedback control
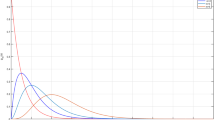
Figure 12 displays the dependence of \(\beta _0^c\) upon the feedback gain \(\alpha _1\) according to the controlled system (8) for \(c=1, k=0.8\), and \(\alpha _2=\alpha _2=0\). The dash-dotted curve corresponds to a delay of \(\tau =5\), the dotted curve to \(\tau =4.5\), the solid curve to \(\tau =4\), and the dashed curve to \(\tau =3.5\). The values of the \(\beta _0^c\) are calculated by solving (12)–(14) numerically. For increasing the feedback gain \(\alpha _1\), the critical value \(\beta _0^c\) increases for a fixed time delay \(\tau \). Increasing \(\alpha _1\) postpones the onset of the Hopf bifurcation and reduces the instability. Hence, the control is successful. It also can be seen from Fig. 12 that when \(\alpha _1>0.1\), increasing time delay of \(\tau \) raises the value of \(\beta _0^c\) to a fixed feedback gain \(\alpha _1\); when \(\alpha _1<0.1\), decreasing time delay of \(\tau \) raises the value of \(\beta _0^c\) to a fixed feedback gain \(\alpha _1\).

The fluctuation of \(\beta _0^c\) depending on \(\alpha _1\) for \(c=1, k=0.8\), and \(\alpha _2=\alpha _3=0\) as given by the controlled system (8)
Case 2 nonlinear state feedback control.
Different from the linear state feedback control discussed in Case 1, the nonlinear state feedback control has two more feedback gain parameters \(\alpha _2\) and \(\alpha _3\), which expands the regulated parameters besides the parameter \(\alpha _1\).
Although it may be enough to use only \(\alpha _1\) for model (1) in delaying the onset of the Hopf bifurcation, it is more effective to use all the three parameters in changing the properties of the Hopf bifurcation for the exponential RED algorithm model. Note that, under these three parameters, only parameters \(a_3\) and \(a_7\) are different from the linear state feedback control discussed in Case 1. The derivation of the formulas for this general nonlinear case can follow the same procedure described in Sect. 3. Choosing different values of \(\alpha _1, \alpha _2\), and \(\alpha _3\), one can efficiently change the stability, direction, and period of the Hopf bifurcation. For example, when
we have
The critical value \(\beta _0^c=0.5157\), and the equilibrium is the same as that in the Case 1 with \(\alpha _1=0.02, \alpha _2=\alpha _3=0\). Taking \(\beta =0.54\) yields the results shown in Fig. 13, where \(\beta \) takes the same value as that of the case shown in Fig. 8. It is noted that the behavior shown in Fig. 13 is quite different from that of Fig. 8 even if a same value of \(\beta \) is used in the two cases. The amplitude of the limit cycle shown in Fig. 8 is larger than that depicted in Fig. 13. This can be explained by means of the approximate Hopf bifurcation solutions [34] that the absolute value of \(\nu _2\) given for Fig. 8 (\(\nu _2=-0.5918\)) is smaller than that for Fig. 13 (\(\nu _2=-1.0587\)), but the linear coefficient \({Re}'\lambda (\beta _0^c)\) is same for the two cases. This suggests that one may choose appropriate values of \(\alpha _2\) and \(\alpha _3\), in addition to \(\alpha _1\), to obtain the desired behavior of a Hopf bifurcation.

Waveform plot and phase portrait of controlled model (8) with \(\beta =0.54\) and \(\alpha _1=0.02, \alpha _2=0.01, \alpha _3=0.02\)
5 Conclusion
In this paper, a new control scheme is proposed based on the dynamic state feedback to control the Hopf bifurcation arising from a time-delayed exponential RED algorithm model. The conditions for the stability and bifurcation are obtained for the controlled exponential RED algorithm model by analyzing the characteristic equation. In addition, using the normal form theory and center manifold reduction, the direction of the Hopf bifurcation is determined. Numerical simulations are presented to verify the analytical results. It is shown that the linear state feedback control may be used to change the onset of the Hopf bifurcation, while the nonlinear state feedback control can be applied to regulate the properties of the Hopf bifurcation.
The future research is to apply this dynamic state feedback scheme to high-dimensional Internet congestion control systems.
References
Chen, G.R., Moiola, J.L., Wang, H.O.: Bifurcation control: theories, methods and applications. Int. J. Bifurc. Chaos 10, 511–548 (2000)
Abed, E.H., Fu, J.H.: Local feedback stabilization and bifurcation control: I. Hopf bifurcation. Syst. Control Lett. 7, 11–17 (1986)
Wang, H., Abed, E.H.: Bifurcation control of a chaotic system. Automatica 31, 1213–1226 (1995)
Tesi, A., Abed, E.H., Genesio, R., Wang, H.O.: Harmonic balance analysis of period-doubling bifurcations with implications for control of nonlinear dynamics. Automatica 32, 1255–1271 (1996)
Pyragas, K., Pyragas, V., Benner, H.: Delayed feedback control of dynamical systems at a subcritical Hopf bifurcation. Phys. Rev. E 70, 056222 (2004)
Yu, P., Chen, G.R.: Hopf bifurcation control using nonlinear feedback with polynomial functions. Int. J. Bifurc. Chaos 14, 1683–1704 (2004)
Just, W., Fiedler, B., Georgi, M., Flunkert, V., Hövel, P., Schöll, E.: Beyond the odd number limitation: a bifurcation analysis of time-delayed feedback control. Phys. Rev. E 76, 026210 (2007)
Liu, F., Guan, Z., Wang, H., Li, Y.: Impulsive control of bifurcations. Math. Comput. Simul. 79, 2180–2191 (2009)
Xiao, M., Daniel, W.C., Cao, J.: Time-delayed feedback control of dynamical small-world networks at Hopf bifurcation. Nonlinear Dyn. 58, 319–344 (2009)
Nguyen, L.H., Hong, K.S.: Hopf bifurcation control via a dynamic state-feedback control. Phys. Lett. A 376, 442–446 (2012)
Kelly, F.P., Maulloo, A.K., Tan, D.K.H.: Rate control for communication networks: shadow prices, proportional fairness and stability. J. Oper. Res. Soc. 49, 237–252 (1998)
Jacobson, V.: Congestion avoidance and control. ACM SIGCOMM Comput. Commun. Rev. 18, 314–329 (1998)
Huang, Z., Yang, Q., Cao, J.: The stochastic stability and bifurcation behavior of an Internet congestion control model. Math. Comput. Model. 54, 1954–1965 (2011)
Floyd, S., Jacobson, V.: Random early detection gateways for congestion avoidance. IEEE Trans. Netw. 1, 397–413 (1993)
Athuraliya, S., Low, S., Li, V., Yin, Q.: REM: active queue management. IEEE Trans. Netw. 15, 48–53 (2001)
Gibbens, R., Kelly, F.: Resource pricing and the evolution of congestion control. Automatica 35, 1969–1985 (1999)
Kunniyur, S., Srikant, R.: Analysis and design of adaptive virtual queue algorithm for active queue management. ACM Comput. Commun. Rev. 31, 123–134 (2001)
Li, C.G., Chen, G.R., Liao, X.F.: Hopf bifurcation in an Internet congestion control model. Chaos Solitions Fractals 19, 853–862 (2004)
Chen, Z., Yu, P.: Hopf bifurcation control for an Internet congestion model. Int. J. Bifurc. Chaos 15, 2643–2651 (2005)
Xiao, M., Cao, J.: Delayed feedback-based bifurcation control in an Internet congestion model. J. Math. Anal. Appl. 332, 1010–1027 (2007)
Xiao, M., Zheng, W.X., Cao, J.: Bifurcation control of a congestion control model via state feedback. Int. J. Bifurc. Chaos 23, 1330018 (2013)
Ding, D., Zhu, J., Luo, X.: Hopf bifurcation analysis in a fluid flow model of internet congestion control algorithm. Nonlinear Anal. Real World Appl. 10, 824–839 (2009)
Ding, D., Zhu, J., Luo, X., Liu, Y.: Controlling Hopf bifurcation in fluid flow model of Internet congestion control system. Int. J. Bifurc. Chaos 19, 1415–1424 (2009)
Guo, S., Liao, X., Li, C.: Stability and Hopf bifurcation analysis in a novel congestion control model with communication delay. Nonlinear Anal. Real World Appl. 9, 1292–1309 (2008)
Guo, S., Liao, X., Liu, Q., Li, C.: Necessary and sufficient conditions for Hopf bifurcation in exponential RED algorithm with communication delay. Nonlinear Anal. Real World Appl. 9, 1768–1793 (2008)
Guo, S., Feng, G., Liao, X., Liu, Q.: Hopf bifurcation control in a congestion control model via dynamic delayed feedback. Chaos 18, 043104 (2008)
Guo, S., Zheng, H., Liu, Q.: Hopf bifurcation analysis for congestion control with heterogeneous delays. Nonlinear Anal. Real World Appl. 11, 3077–3090 (2010)
Hu, H., Huang, L.: Linear stability and Hopf bifurcation in an exponential RED algorithm model. Nonlinear Dyn. 59, 463–475 (2010)
Liu, F., Guan, Z., Wang, H.: Stability and Hopf bifurcation analysis in a TCP fluid model. Nonlinear Anal. Real World Appl. 12, 353–363 (2011)
Liu, F., Wang, H., Guan, Z.: Hopf bifurcation control in the XCP for the Internet congestion control system. Nonlinear Anal. Real World Appl. 13, 1466–1479 (2012)
Rezaie, B., Jahed Motlagh, M.R., Khorsandi, S., Analoui, M.: Hopf bifurcation analysis on an Internet congestion control system of arbitrary dimension with communication delay. Nonlinear Anal. Real World Appl. 11, 3842–3857 (2010)
Hale, J.: Theory of Functional Differential Equations. Springer, New York (1977)
Hassard, B., Kazarinoff, N., Wan, Y.: Theory and Applications of Hopf Bifurcation. Cambridge University Press, Cambridge (1981)
Nayfeh, A.H., Harb, A.M., Chin, C.M.: Bifurcations in a power system model. Int. J. Bifurc. Chaos 14, 497–512 (1996)
Acknowledgments
This work was supported in part by the National Natural Science Foundation of China (Grant Nos. 61203232, 61374180, and 71171050), the Natural Science Foundation of Jiangsu Province of China (Grant No. BK2012072), and the China Postdoctoral Science Foundation funded project (Grant No. 2013M530229).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Xiao, M., Jiang, G. & Zhao, L. State feedback control at Hopf bifurcation in an exponential RED algorithm model. Nonlinear Dyn 76, 1469–1484 (2014). https://doi.org/10.1007/s11071-013-1221-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-1221-0