
Abstract
In this paper, we use a food web model to investigate the effects of habitat loss and species diversity on ecosystem spatial structure and its elasticity. Our model incorporates functional responses based on the Holling-type-II and the modified Lesie–Gower schemes. Criteria for local stability, global stability of the nonnegative equilibria are obtained. The permanent coexistence of the three species is also discussed. Finally, by computer simulations, we find that far-from equilibria, environmental quality is positively correlated patterns complexity communities. Knowledge of the distribution shape of interacting communities will allow us to make better predictions of environmental quality.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The investigation of relationships between organisms and their biotic and abiotic environments is central in describing and understanding ecological and biological processes. The issues raised require more and more a solicitation of tools from complex science theories [7, 8, 16, 38]. In particular, the issue of population interactions is to understand mechanisms impacting the dynamics of trophic food chain.
It is known that ecological communities generally display complex structures that are challenging to integrate into a realistic model [1, 20, 21, 25, 28, 40]. This problem has been considered from the theoretical point of view by Lotka [22–24], followed by Volterra [37]. Lotka has introduced the first model able to elucidate the main features of species interactions and populational cycles in predator–prey systems. However, to gain some more realistic and fundamental understanding of biodiversity conservation or ecosystem loss processes, it is important to take into account spatial degrees of freedom.
Ecosystem loss refers to the disappearance of an ecosystem, or an assemblage of organisms and the physical environment in which they exchange energy and matter. Many studies show the interactions between the effects of disturbances and habitat destruction [15, 30]. Although natural systems are heterogeneous, the direct influence of spatial heterogeneity on most ecological variables is unknown [17, 29, 45]. The lack of spatially explicit, large-scale field studies is identified as a major obstacle to the understanding of fundamental ecological processes. Moreover, the conditions of correlation between the spatial pattern shape and the degree of ecosystem quality are not yet well known.
Turing [35] showed how the coupling of reaction and diffusion can induce pattern formation. Since then, the mechanism responsible for the spontaneous generation of spatial patterns through biological or chemical interactions has been called diffusion instability. The classical Lotka–Volterra type systems are very important in the models of population dynamics. The governing equations for the population densities are described by a system of reaction-diffusion equations, for example, in food webs. A food web can be characterized by a model of complex network, in which a node represents a species Wang et al. [41–44] proposed a class of three-species Lotka–Volterra mutualism models with diffusion, time-varying delay, and linear coupling, which are described by systems of linear parabolic partial differential equations. Ryu and Ahn [31] studied the dynamics of predator–prey interaction systems between two species with ratio-dependent functional responses.
In this paper, we consider a system of reaction-diffusion equations to model the spatiotemporal dynamics of three species linked by a trophic food chain. Our model is based on a modified version of the Leslie–Gower scheme [18, 19]. Modified Leslie and Gower versions was studied by changing the functional response or by adding a third species in the trophic chain [6, 12, 36], also by incorporation a periodic impulsive perturbations [11]. We examine first the mathematical model analysis in Sect. 3 in which we explore the stability of the positive homogeneous equilibrium. Then by numerical simulation in Sect. 4, we focus on complex issues related to patterns of ecosystem loss. Through the analysis of bifurcations, pattern complexity is explored by determining the critical parameter values, which lead to ecosystem changes in a bottom-up scenario of control. We expect that understanding such effects, provide essential tools for the response prediction of communities to global changes or for ecosystem loss.
2 Materials and methods
2.1 Mathematical model
Originally, Leslie and Gower [18] have developed a temporal trophic model without incorporating the spatial dimension. Author in [12] analyzed in detail the nonspatial modified version, which uses the equations below:
with E 1(0)≥0, E 2(0)≥0, and E 3(0)≥0 are initial population densities.
E 1 represents the density of prey at time T. E 2 is the density of medium predator at time T and eating E 1. E 3 is the density of top predator at time T and eating E 2. a 0, b 0, v 0, d 0, a 1, v 1, v 2, d 2, c 3, v 3, and d 3 are model parameters assuming only positive values.
a 0, (respectively c 3) is the growth rate of prey E 1, (respectively top predator E 3). b 0 measures the strength of competition among individuals of species E 1. v 0 is the maximum value of the per capita reduction rate of E 1 due to E 2. v 1 is the maximum value of the per capita growth rate achieved by E 2. v 2 is the maximum value of the per capita reduction rate of E 2 due to E 3. v 3 is the maximum value that the decay rate that top predator E 3 can reach. d 0 measures the extent to which environment provides protection to prey E 1 and middle predator E 2. a 1 is the natural mortality rate of middle predator E 2. d 3 represents the residual loss, caused by high predation of E 2 top predator E 3.
In order to incorporate into (1) the spatial complexity of interactions, we naturally consider this associated reaction-diffusion system of equations,
where δ i is the diffusion rate of population i, (i=1,2,3) and Δ represent Laplacian operator in a bounded domain Ω 0 of \(\mathbb{R}^{n}\) (n=1,2,3). To investigate problem (2), we introduce the following scaling transformations:

We obtain the following equations:
-
\(\frac{\partial W_{1}}{\partial\nu} = \frac {\partial W_{2}}{ \partial\nu} = \frac{\partial W_{3}}{\partial\nu} = 0\) on ∂Ω t>0
-
W 1(x,0)=W 01(x), W 2(x,0)=W 02(x), W 3(x,0)=W 03(x) x∈Ω
where Ω is a bounded domain in \(\mathbb{R}^{n}\), n=1,2,3, with smooth boundary ∂Ω and Δ is Laplacian operator. ε 1, ε 2, and ε 3 are respectively the diffusion rate of prey, medium predator, and top predator. \(\frac{\partial}{\partial\nu}\mid_{\partial\varOmega}\) is the outward normal of ∂Ω. Therefore, the three boundary conditions imply that the region is insular.
W 1(.,t), W 2(.,t), and W 3(.,t) are all densities, so only nonnegative solutions will make sense. In fact, this can be proved by using the comparison principle as long as the initial functions are nonnegative, [9, 33]. In order to simplify computations let us recall that without diffusion, the scaling system is written as follows:
In the mathematical analysis section, we first study the permanence and persistence of solutions of systems (3), then we analyze the stability of the positive homogeneous equilibrium.
2.2 Numerical study
In the section numerical study section, we consider the equation system (2) with positive values of U 1(x,0), U 2(x,0), and U 3(x,0) in domain Ω=[0 100]×[0 100]. We set Neumann boundary conditions and fix the following parameter values: a 0=0.7, b 0=0.25, v 0=0.3, a 1=0.4, v 1=0.8, v 2=0.4, d 2=0.4, c 3=0.2, v 3=0.6, δ 1=0.04, δ 2=0.04, δ 3=0.002.
Note that in system (2) environmental prey carrying capacity K equals \(\frac{a_{0}}{b_{0}}\) and d_0 is its environmental protection. Thus, we define the percentage of protection (pp) by the following ratio: \(pp =\frac{d_{0}}{K}*100\). This index pp will be used as a measure of the environment quality in a bottom-up control. For a given value of pp, we can determine d_0 and have all the values system (2) parameters.
With the software Matlab R2009b, we solve the system (2) by implementing the combined finite differences method and the method Runge–Kutta 4. In our algorithm, we divide our domain Ω=[0 100]×[0 100] into 5002 small cells \(\displaystyle \omega_{ij}, \ i, j = 1,2, \ldots,500 \). At each time t, we compute the density U_l^ij(t) of each species l=1,2,3 in the cell ω_ij. Thus, we can quantify at time t, the spatial complexity sc(t) of each species distribution using the renormalized Shannon index [32]. For prey population, the spatial complexity sc(t) of the distribution at time t is
The spatial complexity sc(t) ranges from 0 to 1. In fact, when sc(t)=0 is the completely ordered case equivalent to a uniform spatial distribution in all cells ω_ij. sc(t)=1 is the most complex case corresponding to the equal frequency of cells with densities varying from 0 to K.
For a given index value pp, we determine the evolution of the spatial complexity sc(t) over a period between 0 and T max=4500. Then we calculate the mean and standard deviation of the spatial complexity produced by this index pp on this observation period.
3 Mathematical results
3.1 Permanence and persistence of solutions
By standard existence theory, [2–4], it is not difficult to establish the local existence of the unique solution (W 1(.,t),W 2(.,t),W 3(.,t)) of (3) for 0=t<T max, where T max is determined by W 01(x), W 02(x), and W 03(x). Now we establish the global existence by proving that for any finite time T, \(\Vert W_{1}(., t)\Vert_{L^{\infty}}\), \(\Vert W_{2}(., t)\Vert_{L^{\infty}}\), \(\Vert W_{3}(., t)\Vert_{L^{\infty}}\) are bounded for 0≤t<T.
Theorem 1
For any smooth nonnegative functions W 01(x)≤1, W 02(x), and W 03(x), (3) has a unique smooth global solution for t>0.
Proof
First, it is easily seen that W 1(x,t)≥0, W 2(x,t)≥0, and W 3(x,t)≥0, since 0 is a sub-solution of each equation of (3). We have
By the comparison principle, we have W 1(x,t)≤W(t)≤1, where \(W(t) = e^{t} \frac{W_{01}}{1-W_{01}+e^{t}}\) is the solution of the initial value problem:
By the comparison principle, we deduce that
where E 2 is solution of system (4) with initial value \(E_{2}(0) = \max_{\bar{\varOmega}} W_{02}(x)\). Thus, from [5, 13],
Let us denote by \(\sigma= \frac{1}{c}E_{2} + E_{1}\),

So,
From the third equation of system (3), we have

By the comparison principle, we deduce that
where E 3 is solution of system (4) with initial value \(E_{3}(0) = \max_{\bar{\varOmega}} W_{03}(x)\).
Thus,

So,
where \(\displaystyle M = \frac{1}{4q}\).
Finally,
□
Theorem 2
The domain
where
is a positively invariant region for the global solutions of system (3).
Proof
As we can see before,

□
3.2 Local stability of the positive steady-state solutions
To investigate the stability of positive equilibria, we consider the solutions W_s(x) of system (3),
satisfying \(( \frac{\partial W_{1}}{\partial t}, \frac {\partial W_{2}}{\partial t}, \frac{\partial W_{3}}{\partial t} )=(0,0,0) \). Let us consider a solution W(x,t) of system (3) having the following form:

Let us substitute W(x,t) with the form (7) into system (3) and then pick up all the terms which are linear in Z:
where

with

Theorem 3
A necessary condition for W s to be locally stable is, at W s ,

Proof
Let ϕ j denote the jth eigenfunction of −Δ on Ω with homogeneous Neumann boundary condition. That is,

for scalar λ j satisfying 0=λ 0<λ 1<λ 2<⋯.
We expand the solution Z of Eq. (8) via
where each \(z_{j}(t) \in\mathbb{R}^{n}\). Using the form of Z given in (11) into Eq. (8) and equating the coefficients of each ϕ j , we have
where C j is the matrix
Now the solution W s is stable if and only if each z j (t) decays to zero. This is equivalent to the condition that each C j has three eigenvalues with negative real parts. The eigenvalues ρ k , k=1,2,3, of C j are determined by
where

Now the three eigenvalues all have negative real part implies that



In particular, these three inequalities should hold for j=0.
For j=0, they are reduced to



□
Recall the assumptions that guarantee the existence of positive steady states are
Under these conditions, by using the Routh–Hurwitz criteria (see [14]), we can obtain sufficient conditions for the stability of the positive steady state solutions. But it is too complicated for the general situation. If the positive steady state is constant, denoted by \((W^{*}_{1}, W^{*}_{2}, W^{*}_{3})\), we can prove the following theorem about the sufficient conditions.
Theorem 4
Let us assume that
The homogeneous positive steady state solution \(W_{s} = (W^{*}_{1}, W^{*}_{2}, W^{*}_{3})\) is locally stable.
Proof
From the proof of Theorem 3, we know that we need only to prove that the solutions of
have negative real parts, where a,b,c are given by (12). From the Routh–Hurwitz criteria, we know that it is true if
To have this, we need only have a>0, ab>c>0.
From condition (12) , we need, for all j≥0,
Observing that λ j ≥0, we need only
At

and thanks to the hypothesis of the theorem,

and,

The second and third inequalities (21) and (22) hold because we have, \(F_{W_{1}} < 0\), \(F_{W_{2}} < 0\), \(F_{W_{3}} = 0\), \(G_{W_{1}} \geq1\), \(G_{W_{2}} < 0\), \(G_{W_{3}} < 0\), \(H_{W_{1}} = 0\), \(H_{W_{2}} > 0\), \(H_{W_{3}} < 0\).
This completes the proof of the theorem. □
3.3 Global stability of the positive steady-state solutions
Theorem 5
Let us assume that

Then, the homogeneous positive steady state solution \((W^{*}_{1}, W^{*}_{2}, W^{*}_{3})\) is globally asymptotically stable.
Proof
Let us denote by


We need to prove that Φ is a Lyapunov function, so we have to show that \(\displaystyle\frac{d\varPhi}{dt} < 0\).

We have

where

From hypothesis (23), the matrix B is positive, and consequently I 1<0.
On the other hand, we have

This completes the proof. □
4 Numerical results of far-from equilibrium dynamics
Figure 1(A) corresponding to a percentage of protection pp=5, shows the distribution of communities of prey, medium predator, and top predator in the domain Ω at time T max. Thus the system is far-from-equilibrium. Figures 1(B), (C), and (D) are obtained for pp=10, pp=15, and pp=20. Thus, variations in the percentage of protection pp impact significantly on the qualitative aspects of the pattern of different communities. The pattern structures are more ordered for lower values of pp than for higher values.

Spatial distribution of communities of prey, medium predator, and top predator at time t=4500, for different index values of environmental quality, in (A) pp=5, in (B) pp=10, in (C) pp=15, in (D) pp=20
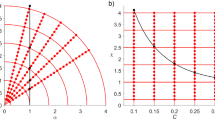
For a given percentage of protection pp, the pattern structure produced by each community is not static (see Fig. 2). It varies in time with a strong increase in the spatial complexity sc(t) at the beginning of observations and with small oscillation amplitudes beyond t=500 (see Fig. 2). In practice, several measures are therefore necessary for a better approximation of sc(t).

Dynamics of prey spatial complexity sc(t), for a given proportion of protection pp=10
Qualitative differences of patterns (Fig. 1) induced by the change in pp are quantified in Fig. 3. Thus, the average value of the spatial complexity sc(t) is an increasing function of the proportion of protection index pp, with pp∈[1,20]. This average value of sc(t) in neighborhoods of equilibria decreases, before to vanish.

Mean and standard deviation of spatial complexity of prey pattern over environment quality
5 Conclusions and discussions
In this study, we first perform the local stability analysis of the positive equilibrium homogeneous of our spatiotemporal system modeling three species interaction dynamics. Then we established the conditions for global stability of this positive equilibrium homogeneous by constructing a Lyapunov function. We show numerically that a low prey environmental protection produces light pressure on species leading to the extinction of prey population and medium predator population. This means the system converges to the homogeneous equilibrium \(( 0 , 0 , \frac{c_{3} d_{3}}{v_{3}} ) \). However, a high prey environmental protection makes the population of medium predator vulnerable and increases the risk of extinction. Therefore, the system converges to the homogeneous equilibrium \(( K , 0 , \frac{c_{3} d_{3}}{v_{3}} ) \). Through direct habitat changing, bottom-up effects lead to a cascade of fluctuations only for far-from equilibrium ecosystems. This helps to capture and quantify the differences between order and disorder. Moreover, this helps to establish the conditions of positive correlation between the spatial distribution complexity and the degree of environmental protection for species. However, the attractors of ecosystem equilibria alter the correlation between environmental quality and the spatial pattern of species. However, although our model is composed of three species, diversity is low and interspecies competition is not considered. These factors can be considered in the future.
Obviously, the measurement of pattern complexity is critical for understanding and preventing the ling bursting risk from environmental quality changes. This confirms the importance of the spatial dimension [10, 26, 27, 34, 39] in the study of ecosystem conservation and supports the work of dos Santos et al. [30], which state that predictions of the impacts of changing disturbance rates on biodiversity depend on community structure and cannot be made without knowledge of concurrent permanent habitat destruction. A detailed evaluation of ecosystem loss before restoration and a precise understanding of the factors structuring assemblages in the systems to be restored appear to be prerequisites [17]. Furthermore, these measurements can provide precision characterization and quantification for the spatial characteristics in biomonitoring approaches.
References
Agarwal, R.P., Karakoç, F.: Oscillation of impulsive partial difference equations with continuous variables. Math. Comput. Model. 50, 1262–1278 (2009)
Amann, H.: Dynamics theory of quasilinear parabolic equations, I: abstract evolution equations. Nonlinear Anal. 12, 895–919 (1988)
Amann, H.: Dynamics theory of quasilinear parabolic equations, II: reaction–diffusion system. Differ. Integral Equ. 3, 13–75 (1990)
Amann, H.: Dynamics theory of quasilinear parabolic equations, III: global existence. Math. Z. 202, 219–250 (1989)
Aziz-Alaoui, M.A., Daher Okiye, M.: Boundedness and global stability for a predator–prey model with modified Leslie–Gower and Holling type II shemes. Appl. Math. Lett. 16, 1069–1075 (2003)
Aziz-Alaoui, M.A.: Study of a Leslie–Gower-type tritrophic population model. Chaos Solitons Fractals 14, 1275–1293 (2002)
Bascompte, J., Meliàn, C.J., Sala, E.: Interaction strength combinations and the overfishing of a marine food web. Proc. Natl. Acad. Sci. USA 102, 5443–5447 (2005)
Becks, L., Hilker, F.M., Malchow, H., Jürgens, K., Arndt, H.: Experimental demonstration of chaos in a microbial food web. Nature 435, 1226–1229 (2005)
Camara, B.I.: Complexité de dynamiques de modèles proie-prédateur avec diffusion et applications. PhD thesis, Le Havre University, France (2009)
Camara, B.I.: Waves analysis and spatiotemporal pattern formation of an ecosystem model. Nonlinear Anal., Real World Appl. 12, 2511–2528 (2011)
Chen, Y., Liu, Z., Haque, M.: Analysis of a Leslie–Gower-type prey–predator model with periodic impulsive perturbations. Commun. Nonlinear Sci. Numer. Simul. 14, 3412–3423 (2009)
Daher Okiye, M.: Study and asymptotic analysis of some nonLinear dynamical systems: Application to predator–prey problems. PhD thesis, Le Havre University, France (2004)
Daher Okiye, M., Aziz-Alaoui, M.A.: On the dynamics of a predator–prey model with the Holling–Tanner functional response. In: Capasso, V. (ed.) Proc. ESMTB Conf., pp. 270–278. MIRIAM Editions, ??? (2002)
Edelstein-Keshet, L.: Mathematical Models in Biology. Classics in Applied Mathematics. SIAM, Philadelphia (2005)
Fagan, W.F., Cantrell, R.S., Cosner, C.: How habitat edges change species interactions. Am. Nat. 153, 165–182 (1999)
Jørgensen, S.E., Fath, B.D.: Application of thermodnamic theory in ecology. Ecol. Complex. 1, 267–280 (2004)
Lepori, F., Palm, D., Brannas, E., Malmqvist, B.: Does restoration of structural heterogeneity in streams enhance fish and macroinvertebrate diversity? Ecol. Appl. 15, 2060–2071 (2005)
Leslie, P.H., Gower, J.C.: The properties of a stochastic model for the predator–prey type of interaction between two species. Biometrica 47, 219–234 (1960)
Leslie, P.H.: Some further notes on the use of matrices in population mathematics. Biometrica 35, 213–245 (1948)
Li, L., Jin, Z.: Pattern dynamics of a spatial predator–prey model with noise. Nonlinear Dyn. 67, 1737–1744 (2012)
Liu, P.-P., Xue, Y.: Spatiotemporal dynamics of a predator–prey model. Nonlinear Dyn. 69, 71–77 (2012)
Lotka, A.J.: Undamped oscillations derived from the law of mass action. J. Am. Chem. Soc. 42, 1595–1599 (1920)
Lotka, A.J.: Analytical note on certain rhythmic relations in organic systems. Proc. Natl. Acad. Sci. USA 6, 410–415 (1920)
Lotka, A.J.: Elements of Mathematical Biology. Dover, New York (1924)
Medvinsky, A.B., Petrovskii, S.V., Tikhonova, I.A., Malchow, H., Li, B.L.: Spatiotemporal complexity of plankton and fish dynamics. SIAM Rev. 44, 311–370 (2002)
Morozov, A., Petrovskii, S.V., Li, B.L.: Bifurcations and chaos in a predator–prey system with the allee effect. Philos. Trans. R. Soc. Lond. B 271, 1407–1414 (2004)
Murray, J.D.: Mathematical Biology: II. Spatial Models and Biomedical Applications. Springer, Berlin (2003)
Polis, G.A., Strong, D.R.: Food web complexity and community dynamics. Am. Nat. 147, 813–846 (1996)
Rossi, M.N., Reigada, C., Godoy, W.A.C.: The role of habitat heterogeneity for the functional response of the spider Nesticodes rufipes (Araneae: Theridiidae) to houseflies. Appl. Entomol. Zool. 41, 419–427 (2006)
dos Santos, F.A.S., Johst, K., Grimm, V., Huth, A.: Interacting effects of habitat destruction and changing disturbance rates on biodiversity: who is going to survive? Ecol. Model. 221, 2776–2783 (2010)
Ryu, K., Ahn, I.: Positive solutions for ratio-dependent predator-prey interaction systems. J. Differ. Equ. 218, 117–135 (2005)
Shannon, C.E., Weaver, W.: The Mathematical Theory of Communication. University of Illinois Press, Urbana (1949)
Smoller, J.: Shock Waves and Reaction–Diffusion Equations. Springer, New York (1983)
Sun, G.-Q., Jin, Z., Li, L., Li, B.-L.: Self-organized wave pattern in a predator–prey model. Nonlinear Dyn. 60, 265–275 (2010)
Turing, A.: The chemical basis of morphogenesis. Philos. Trans. R. Soc. Lond. B 237, 37–72 (1952)
Upadhyay, R.K., Rai, V.: Crisis-limited chaotics in ecological systems. Chaos Solitons Fractals 12, 205–218 (2001)
Volterra, V.: Leçons sur la Théorie de la Lutte Pour la Vie. Ghautier-Villars, Paris (1931)
Walther, G.R.: Community and ecosystem responses to recent climate change. Philos. Trans. R. Soc. Lond. B 365, 2019–2024 (2010)
Wang, B., Wang, A.-L., Liu, Y.-J., Liu, Z.-H.: Analysis of a spatial predator–prey model with delay. Nonlinear Dyn. 62, 601–608 (2010)
Wang, W.M., Lin, Y.Z., Zhang, L., Rao, F., Tan, Y.J.: Complex patterns in a predator–prey model with self and cross-diffusion. Commun. Nonlinear Sci. Numer. Simul. 16, 2006–2015 (2011)
Wang, J.-L., Wu, H.-N.: Stability analysis of impulsive parabolic complex networks. Chaos Solitons Fractals 44, 1020–1034 (2011)
Wang, J.-L., Wu, H.-N.: Robust stability and robust passivity of parabolic complex networks with parametric uncertainties and time-varying delays. Neurocomputing 87, 26–32 (2012)
Wang, J.-L., Wu, H.-N., Guo, L.: Stability analysis of impulsive parabolic complex networks with multiple time-varying delays. Neurocomputing (2012). doi:10.1016/j.neucom.2012.05.024
Wang, J.-L., Wu, H.-N., Guo, L.: Pinning control of spatially and temporally complex dynamical networks with time-varying delays. Nonlinear Dyn. (2012). doi:10.1007/s11071-012-0564-2
Wellnitz, T., Poff, N.L.: Functional redundancy in heterogeneous environments: implications for conservation. Ecol. Lett. 4, 177–179 (2001)
Acknowledgement
Our thanks to the anonymous referees whose valuable comments and suggestions aided in the revision of this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Camara, B.I. Food web complexity analysis: effects of ecosystem changes. Nonlinear Dyn 73, 1783–1794 (2013). https://doi.org/10.1007/s11071-013-0903-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-013-0903-y