
Abstract
This paper proposes a robust adaptive backstepping synchronization method for a class of uncertain chaotic systems. Unknown factors including system uncertainties and external disturbances are estimated by a fuzzy disturbance observer. By use of the fuzzy disturbance observer, any prior information about the unknown factors is not need. The proposed method using the estimated values guarantees the global synchronization for chaotic systems with mismatched uncertainties in the sense of uniform ultimate boundedness. Finally, numerical examples are presented to show the effectiveness of the method.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Since the pioneering work of Pecora and Carroll [1], synchronization of chaotic systems has been one of interesting topics in various research fields including secure communication [2–4], neural networks [5], complex networks [6], biology [7], and mechanics [8]. Many researchers have investigated various synchronization methods such as state feedback control [9–12], delayed feedback control [13], adaptive control [14, 15], backstepping control [16–20], sliding mode control [21–23], \(\mathcal {H}_{\infty}\) control [24, 25], and optimal control [26, 27]. Among the methods, backstepping control scheme has become one of the important and popular approaches for synchronization for chaotic systems. Because the scheme can guarantee global stability and good tracking performance. Moreover, it has an ability to overcome mismatched uncertainty by use of a recursive procedure with the choice of Lyapunov function. In [16], a backstepping synchronization method with parameter update laws was presented for uncertain chaotic systems. Wu and Chen [17] studied backstepping control to suppress the chaotic motion of a modified Chua’s circuit system, guaranteeing the global exponential stability. Chaos synchronization was achieved by backstepping method using single variable feedback [18]. In [19], chaotic systems with unknown bounded uncertainty were synchronized by use of an adaptive law for the upper bound of the uncertainty. In [20], dynamic fuzzy neural networks modeling was used to control uncertain chaotic systems via adaptive backstepping method.
Although the studies mentioned above can synchronize the chaotic systems, there are still some limitations. It is that they often need to know information about the unknown factors. In [16], knowledge of the structure of parameter uncertainty was required to synchronize the chaotic systems. The synchronization method proposed in [20] can be applied when upper bound of the existing uncertainty is assumed to be known. However, in many practical cases, the information about the parameter uncertainty or disturbance may not be available or can be difficult to use them. By using fuzzy logic system (FLS), Kim [28] proposed Fuzzy Disturbance Observer (FDO) to estimate the unknown factors and the estimated values were used to suppress the unknown factors without any prior information about them. In [29], a robust tracking control approach using a discrete-time FDO was studied for nonlinear sampled systems. Moreover, Yoo et al. [30] constructed a more precise FDO by modification of the adaptation law for the parameter vector and showed better performances, compared with the conventional one. Therefore, the method using FDO can be one of good schemes to synchronize uncertain chaotic systems. However, there exist few studies which use FDO for chaotic synchronization and the existing methods have difficulty to control mismatched uncertainty.
In this paper, a robust adaptive backstepping synchronization method using FDO is proposed for chaotic systems with mismatched uncertainty and disturbance. The FDO is used to estimate the unknown factors including the uncertainties and disturbances. Any knowledge about the factors such as their structure or bound is not required because the FLS is used. The estimated value is applied in the proposed controller to suppress the unknown factors. Moreover, the proposed method overcomes the mismatched uncertainty by adopting adaptive backstepping design procedure. The control and adaptation laws used in the control input are derived in based on the Lyapunov stability theory. Eventually, the proposed method guarantees that the synchronization error between the drive and the response system converges into any arbitrarily given small bound in the sense of uniform ultimate boundedness (UUB). Numerical examples show the effectiveness of the proposed synchronization method.
Notations
Throughout this paper, ℝn and ℝn×m denote the sets of n component real vectors and n×m real matrices, respectively. For the vector u∈ℝn, u T denotes its transpose. The notation |⋅| refers of the absolute value of a scalar function and ∥⋅∥ stands for the induced matrix 2-norm. \(\mathcal{L}_{2}\) means the space of square integral vector functions on [0,∞) with norm \(\|\cdot\|\equiv (\int^{\infty}_{0}\|\cdot\|^{2}\,dt )^{1/2}\).
2 Problem statement and preliminary
The synchronization problem is described based on the drive-response framework. Consider the following chaotic system as the drive system:


where x d (t)=[x d1,…,x dm ]∈ℝm is state vector and y d (t)∈ℝ is output vector, and f d (x d (t),t)=[f d1,…,f dm ]∈ℝm is a known continuous nonlinear vector function.
The response system is represented as


where x(t)=[x 1(t),…,x n (t)]T∈ℝn, u(t)∈ℝ, y(t)∈ℝ are, respectively, the state vector, the control input and output vector of the response system, \(f_{i}(\bar{x}_{i}(t),t)\in\mathbb{R}\) and \(g_{i}(\bar{x}_{i}(t),t)\in \mathbb{R}\neq0\) with \(\bar{x}_{i}(t) = [x_{1}(t),\ldots, x_{i}(t)]^{T}\) are known nominal functions, \(\Delta f_{i}(\bar{x}_{i}(t),t)\), \(\Delta g_{i}(\bar{x}_{i}(t),t)\), and d i (t) are uncertainty and disturbance, respectively.
For simplicity, let us denote x i (t)=x i , u(t)=u, \(f_{i}(\bar{x}_{i}(t),t)=f_{i}\), \(\Delta f_{i}(\bar{x}_{i}(t),t)=\Delta f_{i}\), \(g_{i}(\bar{x}_{i}(t),t)=g_{i}\), \(\Delta g_{i}(\bar{x}_{i}(t),t)=\Delta g_{i}\), and d i (t)=d i for i=1,…,n.
By defining the overall disturbance Ω i =Δf i +Δg i x i+1+d i for i=1,…,n−1 and Ω n =Δf n +Δg n u+d n , (3) can be rewritten as

Remark 1
The system (5) is called “strict-feedback” form, in which the backstepping design method can be applied. In practice, we can find many chaotic systems which can be represented as the form, for example, Duffing oscillator, Bonhoeffer–van der Pol oscillator, Rössler system, Chua’s circuit, and so on.
The objective of this paper is to design a controller which makes the output of the response system (4) converge to the output of the drive system (2) with an arbitrarily small error. In order to accomplish our purpose, we need to suppress the overall disturbances existing in the system. It can be achieved by estimation of the disturbances and the estimated value can be obtained by fuzzy logic system (FLS). Here, the basic configuration of FLS [31] is described briefly. FLS performs a mapping from a compact set X=X 1×⋯×X n ⊂ℝn to a compact set V⊂ℝ. The fuzzy rule base consists of a collection of M fuzzy IF-THEN rules:

where x=[x 1,…,x n ]T∈X and y∈V are the input and output of the FLS, respectively, and \(A^{l}_{i}\) and G l are labels of fuzzy sets in X i and R for l=1,2,…,M. By use of the product inference engine, center-average defuzzifier, and singleton fuzzifier, the output of the fuzzy system can be expressed as

where \(\mu_{A^{l}_{i}}(x_{i})\) is membership function value of the fuzzy variable x i , M is the number of fuzzy rules, θ=[y 1,y 2,…,y M ]T is adjustable parameter vector, and ξ(x)=(ξ 1(x),ξ 2(x),…,ξ M (x))T is a regressive vector defined as

which is named fuzzy basis functions (FBFs).
Based on the well-known “universal approximation theorem” [31], the fuzzy system (7) estimates unknown function with a small error called fuzzy approximation error. This characteristic was extended to estimate the disturbance, which was introduced as FDO in [28]. In this paper, FDO is applied to estimate the overall disturbances including uncertainties and disturbances in the response system (3). One of the major advantages of FDO is that it can be a good approach to obtain the estimated value when it is not available to know the bound or structure of the unknown factors. Eventually, the value will be used to compensate the actual disturbance in the proposed method in which the details will be presented in the next section.
3 Robust adaptive backstepping synchronization using FDO
In this section, we propose a synchronization method using robust adaptive backstepping procedure. First, we present a design method of FDO to construct the overall disturbance Ω i that exists in the response system (3). Let us consider the following observer system as
where \(\hat{x} =[\hat{x}_{1},\ldots, \hat{x}_{n}]\in\mathbb{R}^{n}\), p i is a positive constant, \(\hat{\varOmega}_{i}=\theta_{i}^{T}\xi_{i}(x)\), θ i ∈ℝM is the fuzzy parameter vector, ξ i (x)∈ℝM is the fuzzy basis function vector. From this observer system, we can obtain a fuzzy logic system \(\hat{\varOmega}_{i}\) which guarantees that, by the universal approximation theorem [31],

where \(\bar{\varepsilon}_{i}\in\mathbb{R}\) is the upper bound of the fuzzy approximation error. Therefore, we can see that Ω i is estimated by \(\hat{\varOmega}_{i}(x)\) with an error bound \(\varepsilon_{i}\le\bar{\varepsilon}_{i}\in\mathbb{R}\).
Define the observation error as follows:

Then, from the response system (3) and the observer system (9), the error dynamics is described by

where \(\varepsilon_{i} = \varOmega_{i} - \hat{\varOmega}_{i}=\dot{\varphi}_{i}+P_{i}\varphi_{i}\). This disturbance reconstruction error ε i can be rewritten as

where




The following theorem presents an adaptation law for θ i to estimate the overall disturbance Ω i .
Theorem 1
Consider the system (3) and the observer system (9). If the update law of the parameter vector θ i for \(\hat{\varOmega}_{i}(x|\theta_{i})\) is chosen as

where γ i0 and γ i1 are positive constants, then the unknown factor Ω i is estimated by \(\hat{\varOmega}_{i}(x|\theta_{i})=\theta_{i}^{T}\xi_{i}(x)\) guaranteeing the following robust performance

where Γ i0=γ i0 I n×n >0 and γ i1 is the positive constant for i=1,…,n.
Proof
Choose the following Lyapunov function candidate:

where γ i1 is a positive constant.
Differentiating V F along the error dynamics (12) and using (17)–(18) yield

Applying the following inequalities

we have the following inequality:

By integrating both sides of (23) from 0 to T, we can lead to

This inequality (24) is equivalent to inequality (19) in Theorem 1, since V 1(T)>0. This completes the proof. □
Based on Barbalat’s lemma [32, 33], the robust performance of inequality (19) can be explained. If \(l_{i}\in\mathcal{L}_{2}\), i.e., \(\int_{0}^{\infty} l_{i}^{2} \,dt<\infty \), then \(\varphi_{i}\in\mathcal{L}_{2}\) and \(m_{i}\in\mathcal{L}_{2}\). This means that lim t→∞∥φ i (t)∥=0 and lim t→∞∥m i (t)∥=0. Moreover, even though \(l_{i}\notin\mathcal{L}_{2}\), \(\varphi_{i}^{2}\) is bounded by \(l_{i}^{2}\). Hence, we can make the observation error arbitrarily small by setting the predetermined positive weighting constant \(\gamma_{i0}+\frac{1}{p_{i}}\). Hence, we can conclude that \(\hat{\varOmega}_{i}\) can estimate Ω i with arbitrarily small error.
Remark 2
Yoo et al. in [30] improved the performance of the conventional FDO proposed by Kim [28] by modifying the adaptive law for the parameter vector. However, the control methods considered the situation where the matched uncertainty only exists in the system. In this paper, we enable to overcome the mismatched uncertainty by using backstepping scheme with the FDO.
We can obtain the estimated value of the overall disturbance Ω i in (5) by Theorem 1. This means that the value can be used to compensate the overall disturbance Ω i . Now, using the estimated value, we propose a robust adaptive backstepping controller design method to achieve the synchronization between the outputs of the drive system and response system. The design method is presented in the following theorem.
Theorem 2
Consider the drive system (1) and the response system (3). Let us apply the coordinate transformation

with


If the following control law is chosen as

where c i is the positive constant,




σ i , \(k_{i}^{0}\), and δ i are positive constants for i=1,…,n, then the error z 1 between the outputs of the drive system (1) and the response system (3) converges to a small neighborhood of the origin.
Proof
The backstepping design procedure consists of n steps. At each step (1≤i≤n−1), a stabilizing function α i with \(\hat{\varOmega}_{i}\) is developed with respect to Lyapunov function V i and the control law u is obtained in the last step.
Step 1: From (1) and (3), the derivative of z 1=x 1−x d1 is given by

In order to design the stabilizing function α 1, choose the Lyapunov function candidate

where \(\tilde{k}_{1}=k_{1}-k_{1}^{*}\).
Differentiating (34) lead to

By applying the stabilizing function (26) and (29)–(31), we can have

Using the following equation

(36) can be represented as

Based on the universal approximation theorem [31], choose \(k_{1}^{*}\) such that \(\bar{\varepsilon}_{1}\le k_{1}^{*}\) where \(\bar{\varepsilon}_{1}\) is the upper bound of \(\varepsilon_{1}=\varOmega_{1} - \hat{\varOmega}_{1}\). Then we obtain

Now, we introduce the following claim to progress this proof.
Claim
The following inequality holds for any δ>0 and y∈ℝ:

where η is a constant that satisfies η=e −(η+1), i.e., η=0.2785.
The proof of this claim follows after straightforward algebraic manipulation, and is therefore omitted. Then, by application of the claim, we have

where r 1=min{2c 1,σ 1 ρ 1}>0 and \(\lambda_{1}=\frac{1}{2}k_{1}^{*}\delta_{1} + \frac{1}{2}\sigma_{1}(k_{1}^{*}-k_{1}^{0})^{2}\). It should be noted that the coupling term g 1 z 1 z 2 is cancelled in the next step.
Step i (2≤i≤n−1): The derivative of z i =x i −x di −α i−1 is written by

Let us choose the Lyapunov function candidate to obtain the stabilizing function α i

where \(\tilde{k}_{i}=k_{i}-k_{i}^{*}\).
By using the stabilizing function (27) and (29)–(31), we obtain the derivative of V i as follows:

Using the following equation

and choosing \(k_{i}^{*}\) such that \(\bar{\varepsilon}_{i}\le k_{i}^{*}\) where \(|\varepsilon_{i}|= |\varOmega_{i} - \hat{\varOmega}_{i}| \le\bar{\varepsilon}_{i}\), the inequality (44) can be represented as

Then, with the claim mentioned above, we have

where r i =min{2c i ,σ i ρ i for i=1,…,i}>0 and \(\lambda_{i}=\sum_{j=1}^{i} [\frac{1}{2}k_{j}^{*}\delta_{j} +\frac{1}{2}\sigma_{j}(k_{j}^{*}-k_{j}^{0})^{2} ]\).
Step n: In this final step, we derive the control law u(t) to achieve the synchronization. The derivative of z n =x n −x dn −α n−1 is written by

In the similar way with the previous steps, the Lyapunov function candidate is chosen as

where \(\tilde{k}_{n}=k_{n}-k_{n}^{*}\) and its derivative is obtained with the control input (28) and (28)–(31) as follows:

Using the following equation

choosing \(k_{n}^{*}\) such that \(|\varepsilon_{n}|=|\varOmega_{n} - \hat{\varOmega}_{n}| \le\bar{\varepsilon}_{n}\le k_{n}^{*}\), and applying the claim yield

where r n =min{2c n ,σ n ρ n for i=1,…,n}>0 and \(\lambda_{n}=\sum_{j=1}^{n} [\frac{1}{2}k_{j}^{*}\delta_{j} +\frac{1}{2}\sigma_{j}(k_{j}^{*}-k_{j}^{0})^{2} ]\).
It is obvious that the inequality (52) is equivalent to

This means that z i and k i are globally uniformly ultimately bounded (UUB). Therefore, we can conclude that the output of the response system (3) converges to one of the drive system (1) with a small error, that is, the synchronization is achieved by the proposed control law. Moreover, if the design constants δ i , σ i , and ρ i , are appropriately chosen, then it is possible to make the error as small as desired. This completes the proof. □
Remark 3
It is clear that the stabilizing function α i for i=1,…,n−1 are differentiable because all of terms of α i are differentiable. Therefore, the differential terms included in α i for i=2,…,n−1 and u can be implemented.
Remark 4
The hyperbolic function tanh(⋅) is often used as an approximation of the discontinuous function sgn(⋅). In fact, as δ i approaches zero, w i (z i ) approaches the sign function. This replacement makes the control law continuous without the loss of the robustness.
4 Numerical examples
In order to verify the effectiveness of the proposed method, two examples are presented in this section. In the first example, the drive system and the response system are selected as Bonhoeffer–van der Pol (BVP) oscillator and Duffing oscillator, respectively. The second example presents the chaos synchronization between Lorenz system and Duffing oscillator. Namely, the drive and response systems in each example have different dynamics [21, 30]. Because, in many practical cases, we cannot easily guarantee that response system works by the same dynamics with drive system. Moreover, by replacing the known function f i with f di , we can easily extend our proposed method to the situation where the systems are identical. The simulations are conducted in Simulink (MATLAB) using a fixed step fourth- order Runge–Kutta solver with a sample period of T s =0.005 s.
Example 1
Consider Bonhoeffer–van der Pol (BVP) oscillator as the drive system

where
and Duffing oscillator as the response system

where the nominal system, uncertainty, and disturbance are f 1=0, g 1=1, \(f_{2}=-0.4x_{2}(t) + 1.1x_{1}(t) - x_{1}^{3}(t)+ 1.8 \cos(1.8t)\), g 2=1, Δf 1=0, Δg 1=0.1, \(\Delta f_{2}=-0.05x_{1}^{3}(t)+0.2x_{1}(t)\), Δg 2=0, d 1(t)=0.1cos(t), d 2(t)=0.2sin(t).
Then the overall disturbance is defined as Ω 1=Δf 1+Δg 1+d 1(t)=0.1x 2(t)+0.1cos(t) and \(\varOmega_{2}=\Delta f_{2}+\Delta g_{2}+d_{2}(t)=-0.05x_{1}^{3}(t)+0.2x_{1}(t)+ 0.2\sin(t)\).
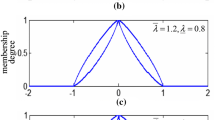
To construct the FDO, we use the input vector of the FLS as X=[x 1,x 2]T where x l ∈[−2,2], l=1,2. We choose 3 centers of the Gaussian membership function \(\mu_{l}=\exp [-(x_{l}-c_{ml})^{2}/\sigma_{\mu}^{2} ]\) where σ μ =1.2 for each FLS input, i.e. C m =[c m1,c m2] for m=1,2,…,9 with uniform distance. The used parameters are c 1=c 2=1, γ 0=γ 1=10, p i =10, δ i =0.01, ρ i =3, σ i =1, \(k_{i}^{0}=1\) for i=1,2. Initial values are chosen as x d0=[−0.5;−2], x 0=[−1.5;1.5], \(\hat{x}_{0}=[0;0]\), θ i0=0, k i0=0.
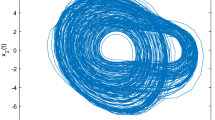
The drive system (54) and response system (55) are depicted in Fig. 1(a) and (b), respectively. Figure 2(a) shows the output trajectories of the drive system and response system and the synchronization error is shown in Fig. 2(b). From the figure, we can easily see that the synchronization is achieved by the proposed method. In Fig. 3, the actual overall disturbance existing in the response system and the estimated values obtained by FDO are presented. It is shown that the FDO can estimate the overall disturbance well and the proposed method synchronizes the chaotic systems.

The drive system (a) and response system (b) in Example 1

(Color online) The output trajectories of the drive and response system (a) and the synchronization error (b) in Example 1

(Color online) The actual overall disturbance Ω(x(t)) and FDO \(\hat{\varOmega}(x(t))\) in Example 1
Example 2
In this example, to show the effectiveness of FDO, we compare the simulation results of two situations; when the FDO is used and not. The proposed method can be applied for the synchronization, even though the dimension of the drive system and response system is different. Let us choose Lorenz system as the drive system, which is a three-dimensional system

and the response system is chosen as the same system, Duffing oscillator, with Example 1.
We use the input vector of the FLS as X=[x 1,x 2]T where x 1∈[−20,20] and x 2∈[−50,50]. We choose 5 centers of the Gaussian membership function \(\mu_{l}=\exp [-(x_{l}-c_{ml})^{2}/\sigma_{\mu l}^{2} ]\) where σ μ1=6 and σ μ2=15 for each FLS input, i.e., C m =[c m1,c m2] for m=1,2,…,25 with uniform distance. The used parameters are c i =1, γ 0=γ 1=20, p i =20, δ i =0.01, ρ i =1, σ i =1, \(k_{i}^{0}=1\) for i=1,2. Initial values are chosen as x d0=[−10;−5;1], x 0=[−1.2;1.2], \(\hat{x}_{0}=[0;0]\), θ i0=0, k i0=0.
The Lorenz system (56) is depicted in Fig. 4. The effectiveness of the FDO is shown by comparing two cases: (1) when the FDO is not applied (Fig. 5) and (2) when the proposed method including the FDO is applied (Fig. 6). Both figures show the output trajectories and the synchronization error for each case. From these figures, we can easily see that the synchronization performance is better when the FDO is used. This is why the proposed method effectively suppress the overall disturbance by using the estimated value obtained by the FDO. The estimated values are shown with the actual overall disturbance existing in the response system in Fig. 7. From these results, we conclude that the proposed method successfully synchronizes although uncertainty and disturbance exist in the system.

(Color online) The output trajectories of the drive and response system (a) and the synchronization error (b) when the FDO is not applied, \(\hat{\varOmega}_{i}=0\) (Example 2)

Lorenz system as the drive system in Example 2

(Color online) The output trajectories of the drive and response system (a) and the synchronization error (b) by the proposed method in Example 2

(Color online) The actual overall disturbance Ω(x(t)) and FDO \(\hat{\varOmega}(x(t))\) in Example 2
5 Conclusions
We proposed a robust adaptive backstepping synchronization method using FDO for chaotic systems with mismatched uncertainties and disturbances. The unknown factors were estimated by the FDO without requiring any prior information about them. The mismatched uncertainties in the response system were overcome by the proposed adaptive backstepping design procedure with the estimated values. The adaptive laws used in the procedure were obtained based on Lyapunov stability theorem. Finally, the proposed method guaranteed the global chaotic synchronization in the sense of UUB. Numerical examples showed the effectiveness of the proposed method.
References
Pecora, L.M., Carroll, T.L.: Synchronization in chaotic systems. Phys. Rev. Lett. 64, 821–824 (1990)
Yang, T., Chua, L.O.: Secure communication via chaotic parameter modulation. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 43, 817–819 (1996)
Feki, M.: An adaptive chaos synchronization scheme applied to secure communication. Chaos Solitons Fractals 18, 141–148 (2003)
Sheikhan, M., Shahnazi, R., Garoucy, S.: Synchronization of general chaotic systems using neural controllers with application to secure communication. Neural Comput. Appl. (2011). doi:10.1007/s00521-011-0697-0
Meng, J., Wang, X.: Robust anti-synchronization of a class of delayed chaotic neural networks. Chaos 17, 023113 (2007)
Ji, D.H., Lee, D.W., Koo, J.H., Won, S.C., Lee, S.M., Park, Ju H.: Synchronization of neutral complex dynamical networks with coupling time varying delays. Nonlinear Dyn. 65(4), 349–358 (2011)
Strogatz, S.H.: Sync: How Order Emerges from Chaos in the Universe, Nature, and Daily Life. Theia, an imprint of Hyperion, New York (2004)
Nijmeijer, H., Rodriguez-Angeles, A.: Synchronization of Mechanical Systems. World Scientific, Singapore (2003)
Hu, G., Pivka, L., Zheleznyak, A.L.: Synchronization of a one-dimensional array of Chua’s circuits by feedback control and noise. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 42, 736–740 (1995)
Yu, H.T., Wong, Y.K., Chan, W.L., Tsang, K.M., Wang, J.: Feedback linearization control of chaos synchronization in coupled map-based neurons under external electrical stimulation. Int. J. Control. Autom. Syst. 9(5), 867–874 (2011)
Su, W.J.: A global asymptotic synchronization problem via internal model approach. Int. J. Control. Autom. Syst. 8(5), 1153–1158 (2010)
Jiang, G.-P., Chen, G., Tang, W.K.-S.: A new criterion for chaos synchronization using linear state feedback control. Int. J. Bifurc. Chaos 13, 2343–2351 (2003)
Lee, S.M., Choi, S.J., Ji, D.H., Park, Ju H., Won, S.C.: Synchronization for chaotic Lur’e systems with sector restricted nonlinearities via delayed feedback control. Nonlinear Dyn. 59(1–2), 277–288 (2010)
Huang, L., Wang, M., Feng, R.: Parameters identification and adaptive synchronization of chaotic systems with unknown parameters. Phys. Lett. A 342, 299–304 (2005)
Salarieh, H., Alasty, A.: Adaptive synchronization of two chaotic systems with stochastic unknown parameters. Commun. Nonlinear Sci. Numer. Simul. 14, 508–519 (2009)
Wang, C., Ge, S.S.: Adaptive synchronization of uncertain chaotic systems via backstepping design. Chaos Solitons Fractals 12, 1199–1206 (2001)
Wu, T., Chen, M.-S.: Chaos control of the modified Chua’s circuit system. Physica D 164, 53–58 (2002)
Zhang, J., Li, C., Zhang, H., Yu, J.: Chaos synchronization using single variable feedback based on backstepping method. Chaos Solitons Fractals 21, 1183–1193 (2004)
Bowong, S.: Adaptive synchronization of chaotic systems with unknown bounded uncertainties via backstepping approach. Nonlinear Dyn. 49, 59–70 (2007)
Lin, D., Wang, X., Nian, F., Zhang, Y.: Dynamic fuzzy neural networks modeling and adaptive backstepping tracking control of uncertain chaotic systems. Neurocomputing 73, 2873–2881 (2010)
Yau, H.-T., Yan, J.-J.: Chaos synchronization of different chaotic systems subjected to input nonlinearity. Appl. Math. Comput. 197, 775–788 (2008)
Wang, H., Han, Z.-Z., Xie, Q.-Y., Zhang, W.: Sliding mode control for chaotic systems based on LMI. Commun. Nonlinear Sci. Numer. Simul. 14, 1410–1417 (2009)
Mou, C., Jiang, C.-S., Bin, J., Wu, Q.-X.: Sliding mode synchronization controller design with neural network for uncertain chaotic systems. Chaos Solitons Fractals 39, 1856–1863 (2009)
Park, J.H., Ji, D.H., Won, S.C., Lee, S.M.: \(\mathcal{H}_{\infty}\) synchronization of time-delayed chaotic systems. Appl. Math. Comput. 204, 170–177 (2008)
Ahn, C.K., Jung, S.-T., Kang, S.-K., Joo, S.-C.: Adaptive \(\mathcal{H}_{\infty}\) synchronization for uncertain chaotic systems with external disturbance. Commun. Nonlinear Sci. Numer. Simul. 15, 2168–2177 (2010)
Kuo, H.-H., Hou, Y.-Y., Yan, J.-J., Liao, T.-L.: Reliable synchronization of nonlinear chaotic systems. Math. Comput. Simul. 79, 1627–1635 (2009)
Grzybowski, J.M.V., Rafikov, M., Balthazar, J.M.: Synchronization of the unified chaotic system and application in secure communication. Commun. Nonlinear Sci. Numer. Simul. 14, 2793–2806 (2009)
Kim, E.: A fuzzy disturbance observer and its application to control. IEEE Trans. Fuzzy Syst. 10(1), 77–84 (2002)
Kim, E., Park, C.: Fuzzy disturbance observer approach to robust tracking control of nonlinear sampled systems with the guaranteed suboptimal \(\mathcal{H}_{\infty}\) performance. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 34(3), 1574–1581 (2004)
Yoo, W., Ji, D., Won, S.: Synchronization of two different non-autonomous chaotic systems using fuzzy disturbance observer. Phys. Lett. A 374, 1354–1361 (2010)
Wang, L.X.: A Course in Fuzzy Systems and Control. Prentice-Hall PTR, Englewood Cliffs (1996)
Slotine, J.J.E., Li, W.: Applied Nonlinear Control. Prentice-Hall, Englewood Cliffs (1991)
Khalil, H.K.: Nonlinear Systems. Prentice-Hall, Upper Saddle River (1996)
Acknowledgements
The work was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science, and Technology (2010-0009373).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ji, D.H., Jeong, S.C., Park, J.H. et al. Robust adaptive backstepping synchronization for a class of uncertain chaotic systems using fuzzy disturbance observer. Nonlinear Dyn 69, 1125–1136 (2012). https://doi.org/10.1007/s11071-012-0333-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-012-0333-2