
Abstract
The integration of education and robotics has emerged as a crucial development in the technological landscape. This study focuses on the use of a robot teaching assistant to enhance the learning efficiency of 8th-grade students in hands-on STEM activities centered around the theme of “Smart City.” It explores the impact of educational robots on students' learning outcomes and their development of hands-on skills through diverse learning methods. Conducted over 12 weeks with 103 participants, the study employed a quasi-experimental design. Students were split into two groups: The Experimental Group (EG), using the 6E model with robot teaching assistants, and the Control Group (CG), using only the 6E model. The analysis of covariance revealed that the EG exhibited superior performance in STEM knowledge, motivation, and hands-on skills compared to the CG. Further analysis indicated that learning motivation significantly influenced hands-on performance in the EG, particularly in high-scoring subgroups. The findings suggest that combining the 6E model with educational robots effectively enhances STEM learning and student engagement. Educational robots as teaching assistants not only aid in knowledge acquisition but also significantly boost students' motivation and hands-on skill development. This implies a promising direction for integrating advanced technology in educational practices to foster more effective learning environments.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
In 2018, Taiwan’s Ministry of Education released the Curriculum Guidelines of 12-Year Basic Education for Elementary School, Junior High and General Senior High Schools – The Domain of Technology (hereafter referred to as the Technology Curriculum Guidelines), which includes both Information Technology and Living Technology and allows students to learn in a more coherent and integrated manner through the interplay of different curricula within the domains as well as curriculum design (Ministry of Education, 2018). STEM is a cross-disciplinary instructional model that combines the four domains of Science, Technology, Engineering, and Mathematics to provide students with a myriad of essential skills needed in the twenty-first century, such as the ability to solve complex problems, teamwork, etc. (Nadelson & Seifert, 2017; Struyf et al., 2019). In previous studies, it was found that hands-on STEM activities implemented in the general curriculum were less likely to take into account knowledge of all four STEM disciplines, as most STEM curricula focused primarily on science and mathematics, with relatively little emphasis on technology and engineering. Because science and mathematics are usually considered more tangible in terms of content and knowledge, while technology and engineering, in general, tend to be more abstract (Breiner et al., 2012), STEM curricula often lack a systematic and sequential teaching model to lead students, which some studies have found resulted in poor learning outcomes and low motivation (Chew & Cerbin, 2021; Ching et al., 2018).
Previous research has shown that motivation is an important factor affecting students’ learning outcomes (Law et al., 2019; Lu et al., 2022). When students are confronted with topics that they are unfamiliar with or uninterested in, it will ultimately lead to decreased motivation and willingness to learn. For this reason, the International Technology and Engineering Educators Association (ITEEA) proposed the 6E model, which emphasizes the importance of hands-on work and student-centered teaching strategies. The 6E model effectively addresses the issue of the absence of systematic and sequential STEM curricula through its six steps of the engineering design and inquiry process. The results of related studies on the application of the 6E model in STEM teaching have demonstrated that the model can significantly enhance students’ learning outcomes and hands-on abilities. The 6E model was designed to lead students to self-exploration in a systematic way by stages, incorporating the concepts of design and reflection, highlighting real-world contexts and situations, and emphasizing the core concepts of realistic contextualization and hands-on design (Burke, 2014; Hashim et al., 2018; Hsiao et al., 2023). The 6E model as an instructional model focuses on learner-centered teaching and the importance of learners’ own motivation and willingness to learn, which indirectly affects their learning performance (Hsiao et al., 2023; Lin et al., 2020).
In recent years, numerous studies have incorporated intelligent robots, known as educational robots, into the educational sector to assist student learning (Anwar et al., 2019; Hu et al., 2023). For instance, Chen et al. (2023) used educational robots to incorporate gamification elements into STEM education by introducing contextual tasks to increase student engagement, thereby increasing student motivation and creativity. Current teaching methods often rely on one-to-many instruction, but this approach can lead to several challenges during hands-on STEM lessons due to varying levels of student comprehension and attentiveness: (1) difficulty in providing inclusive instruction for all students, (2) challenges for students in revising material taught by teachers, and (3) increased instructional loads for teachers (Good & Lavigne, 2017). Therefore, this study proposes the use of robots as teaching assistants to support teachers in hands-on STEM activities. The goal is to mitigate some of the one-to-many teaching model's limitations through robot assistants and to improve students' learning outcomes in hands-on STEM activities. By employing robot assistants, more personalized learning support can be offered, aiding students in overcoming comprehension hurdles and boosting their motivation and engagement in the learning process.
This study was based on the learning content of the science and technology domains in the 2019 Technology Curriculum Guidelines for 8th grade students in junior high schools, and the curriculum design was based on the theme of “Smart City”. Kebbi educational robots were utilized as teaching assistants to assist students in learning through real-time question-and-answer sessions and an interactive approach, and to stimulate students’ motivation to learn. At the same time, the Motoduino programming function (motoBlockly) was used to support the Arduino STEM Smart City project. The course content was divided into two main themes based on the characteristics of electronic components, and then the students were allowed to design, create, and complete their own works. At the end of the course, the students were assessed in three areas—STEM knowledge, learning motivation, and hands-on performance —to explore the changes and differences in their performance under different teaching methods. To better understand the intra- and inter-group relationships and how learning motivation affects students’ hands-on performance, the present study also examined the relationship between the Experimental Group (EG) and the Control Group (CG) in terms of the two affective levels and the relationship with hands-on performance.
Literature Review
STEM Education and Robot Teaching Assistants
The use of robots in teaching has become quite frequent. Papert (1984) was the first to propose the use of robots in educational settings to assist students in the learning process of computer programming. Papert (1980) developed the LOGO programming language and Turtle robot, which was used to teach young children programming-related concepts and non-programming concepts such as creativity and abstraction. To extend this concept to K-12 and beyond, the MIT Media Lab worked with Seymour Papert to develop the LEGO MINDSTORM series of robots. There are now many robots used in educational applications, such as Thymio, Dash&Dot, NAO, Zenbo, Kebbi, and many others.
Educational robots are powerful and versatile educational tools with great motivational benefits (Daniela & Lytras, 2019; You et al., 2021). Robotics education programs can arouse students’ motivation for learning STEM-related subjects (Chen & Chang, 2018), which has positively contributed to addressing Taiwan’s national demand for STEM industry-related talents. The National Science and Technology Council has also pointed out that robotics clubs can serve as suitable interdisciplinary activities that allow students to engage in STEM learning, enabling them to apply knowledge across disciplines to identify and solve problems, as well as helping them to overcome career barriers in various STEM fields (Daniela & Lytras, 2019). Due to the complexity of the education system, there are multiple moderating variables when applying educational robots in the context of STEM education. Specifically, robot-assisted STEM education can be viewed as a complex system stemming from technology (i.e., educational robots), users (e.g., teachers, students), information (e.g., subject knowledge), pedagogy (e.g., interaction types), and external environment (e.g., intervention duration) (Xu & Ouyang, 2022). As found in previous studies, educational robots can enhance students’ engagement, attitudes (Hsiao et al., 2022; Striepe et al., 2021), and motivation to learn in STEM programs (Daniela & Lytras, 2019; Eguchi, 2016). Over the past few years, educational robots and hands-on STEM activities have made their way into many schools around the world. Some studies have suggested that utilizing educational robots for teaching appears to boost students’ interest and motivation and facilitate learning processes (Anwar et al., 2019; Chevalier et al., 2020). In addition, robots may be effective in supporting teachers by making their lessons easier and more enjoyable. However, in contrast, some studies have shown that students who participated in educational robotics activities did not achieve statistically significant differences compared with students who attended traditional courses, and that educational robotics activities did not produce positive effects compared with traditional teaching methods (Chang & Chen, 2022; Hu et al., 2023).
In summary, robotic technology is multidisciplinary in nature, in that it provides constructive learning environments and has an important role in the learning of STEM disciplines (Hsiao et al., 2022). Robotics education is one of the most important ways to implement STEM education because it is capable of providing guidance to support students in the STEM learning process (Chang & Chen, 2022; Kim et al., 2017). Moro et al. (2018) stated that the use of educational robots does not imply teaching a specific subject such as robotics; rather, it is based on a constructivist approach to teaching that allows learners to use educational robots in a student-centered way that emphasizes the process of actively constructing knowledge, with teachers acting only as guides and facilitators. Therefore, educational robots were introduced in this study as teaching assistants to help the teacher implement hands-on STEM activities for student learning.
Using the 6E Model in Hands-on Activities in STEM Education
The 6E model was proposed by the ITEEA in 2013. In the face of rapid technological advances and increasingly complex problems, the 6E model was designed as a practical, hands-on approach to problem solving (Burke, 2014; Hashim et al., 2018; Hsiao et al., 2023). According to the 2018 Technology Curriculum Guidelines (Ministry of Education, Taiwan, 2018), the core of the Living Technology Curriculum emphasizes “design and production,” in which teachers provide guidance for students to observe and experience the needs and problems in daily life, and then design suitable products using technological tools, materials, and resources to realize their ideas, thus cultivating the students’ ability to perform hands-on work. The six stages of the 6E model are (1) Engage: To stimulate students’ interest by creating connected experiences through real-life situations; (2) Explore: To provide students with opportunities for self-exploration and learning; (3) Explain: To enable students to rethink what they have learned and construct knowledge; (4) Engineer: To clarify and understand relevant scientific knowledge through hands-on work; (5) Enrich: To construct and deepen understanding through interaction and discussion between teachers and students; and (6) Evaluate: To make students and teachers aware of students’ learning progress with the purpose of facilitating future improvement through formative assessment and teacher feedback (Burke, 2014; Hashim et al., 2018).
Teaching STEM courses not only focuses on hands-on practical work but also intends to explore more ways to guide students in their learning (Lin et al., 2020). As indicated in previous studies, the 6E model has been shown to be a suitable strategy for hands-on programs (Hsiao et al., 2023). The 6E model can effectively enhance students’ learning performance, motivation, creativity, and hands-on skills, as well as increase their willingness to engage in self-exploration (Hashim et al., 2018; Hsiao et al., 2022). Moreover, many scholars have applied the 6E model to the STEM curriculum in the K-12 setting, and they found that it facilitated educators in organizing and implementing the STEM curriculum, which contributed to improved hands-on skills and improved learning outcomes (Chen, 2022; Lin et al., 2020).
It can be concluded that the 6E model provides a clear teaching sequence for STEM education that supports both teachers’ teaching and students’ learning. For the purposes of this study, the 6E model was used in weekly courses, during which the students were required to learn its six steps to complete various exercises and their final hands-on projects.
Effects of Robot Teaching Assistants on Learning Motivation
Keller (1987) suggested that a systematic curriculum should place more emphasis on students’ motivation to learn, and that failure to improve motivation could easily result in poorer learning outcomes. Therefore, in order to address these related difficulties, Keller (2009) proposed the ARCS Motivation Model, which categorizes learners’ motivation into four parts: (1) Attention: using the content to attract students’ attention in class; (2) Relevance: learning content and objectives should be relevant to students’ everyday lives; (3) Confidence: the course activities are designed in a way that enhances the willingness to learn through successful experiences and makes students believe that achieving success is not difficult; and (4) Satisfaction: encouragement or positive reinforcement given to students during their learning processes.
When students are well-motivated to learn, they are likely to enjoy improved learning outcomes (Chen, 2022). Moreover, when facing critical problems, students who have better motivation to learn have more patience and engagement in learning activities, thereby leading to more favorable learning outcomes. Therefore, when designing curriculum activities, teachers should pay more attention to ways to enhance students’ interest and connection to the subject matter to stimulate their intrinsic motivation toward more successful learning (Hsiao et al., 2023). Hong et al. (2016) conducted a quasi-experimental study using an anthropomorphic robot, NAO, to assist 4th grade students in an elementary school in Taiwan in learning to listen and speak in an English course, and the results showed that the students in the classes assisted by the NAO robot had better motivation to learn. Chao et al. (2023) implemented the Kebbi robot in elementary STEM education, creating an engaging and interactive learning environment. This method effectively delivered knowledge, particularly motivating indigenous students by connecting them with their culture and advancing their IT skills, thus enhancing their interest and motivation in STEM. The incorporation of educational robots undoubtedly ignites students' initial fascination with the robots themselves and concurrently enhances their motivation to learn (Anwar et al., 2019). The dynamic facial expressions and movements exhibited by educational robots, coupled with their interactive involvement throughout the instructional process, furnish students with a more immersive and participatory learning environment. Consequently, this heightened level of engagement serves to further invigorate students' motivation to learn (Anwar et al., 2019).
From past literature, it has been found that robots with anthropomorphic appearances, such as those equipped with functions like voice feedback, communication dialogue, movable limbs, and emotion-displaying screens, are suitable for integration into teaching. This is because they can provide immediate encouragement to students upon achieving learning goals, similar to teachers, with accompanying hand gestures and facial expressions, thereby enhancing students' learning motivation, attitudes, and indirectly influencing learning performance (Belpaeme et al., 2018). Leonard et al. (2016) found that students in grades five through eight experienced enhanced self-efficacy and STEM attitudes when learning in an environment combining educational robots and gamification. Reyes et al. (2021) used NAO robots as auxiliary tools in high school mathematics courses to assist teachers in presenting concepts, explanations, and assessing activities. By incorporating learning activities into the robot system, the study found that the group had higher learning motivation and demonstrated better cooperative behavior. Hence, this research utilizes the 6E teaching strategy for a practical smart city course, using the Instructional Materials Motivation Survey (IMMS), developed by Keller (1999) based on the ARCS model, to measure changes in students' motivation before and after the course. Our educational strategy integrates the ARCS motivation model and the 6E learning model, as shown in Table 1.
Purpose of the Research
In this study, the researcher used robot teaching assistants in STEM hands‐on activities to help the 8th‐grade students improve their learning efficiency. The theme of the hands‐on activities was “Smart City (smart garbage cans, smart streetlights)”. All students were expected to learn STEM knowledge, creativity, and hands‐on skills. The students were required to use their acquired STEM interdisciplinary knowledge and practical tools, such as an Arduino interactive module, a servomotor, hands‐on tools, etc., to make smart garbage cans and smart streetlights, which was a manifestation of learning by doing and hands‐on experience.
The research questions are as follows:
-
1.
Did the students achieve better learning outcomes, motivation, and hands‐on performance in the hands‐on STEM activities with the assistance of the educational robots?
-
2.
Did different learning approaches (i.e., using the 6E model and a robot teaching assistant versus using the 6E model only) and learning motivation have a significant impact on the students’ hands-on performance?
Materials and Methods
Research Design and Content
This study used a quasi-experimental research method to investigate the effects of using the 6E model with and without an educational robot as a teaching assistant on the STEM knowledge, learning motivation, and hands-on performance of junior high school students, and then compare whether using the robots enhanced the students’ acquisition of STEM knowledge, hands-on performance, and learning motivation. The independent variables in this study were the EG (which used the 6E model and robot teaching assistants) and the CG (which used the 6E model only). The dependent variables were STEM knowledge, learning motivation, and hands-on performance. Regarding the curriculum content, the STEM curriculum was designed in collaboration with teachers from relevant fields both within and outside the school and was in line with the learning content of the 2019 Technology Curriculum Guidelines in the field of Information Technology (IT), covering discussions on IT-related social issues (Smart City), as well as the application and implementation of modularized programming (smart streetlights and smart garbage cans). The programming language used in the curriculum was taught through the use of motoBlockly. In addition, this study was conducted to compare the effects of high- and low-scoring groups in terms of hands-on performance based on learning motivation, and to explore the relationship between the students’ learning motivation and their hands-on performance.
Participants of the Study
This study adopted purposive sampling to select students from the 8th grade in a junior high school in Taipei City. The participants in this experiment were all enrolled in a Living Technology course in the second term of the 2022 school year, and they were allocated to different classes by mixed-ability grouping. The study was conducted on a class basis, with two classes each in the EG (51 students who used the 6E model and educational robots) and the CG (52 students who used the 6E model only). The sample size for the study was 103 participants. Each class was divided into groups of four to five students, all of which received 12 weeks of experimental teaching and conducted hands-on project work (45 minis per week). The students in this study were selected from 8th-grade students in a junior high school who had already learned the concepts of using hands-on tools and a programming language for one year, and they were therefore equipped with a comprehensive foundation for the STEM curriculum designed for this study.
The Robot Teaching Assistant
In this study, Kebbi, an anthropomorphic robot developed by NUWA Robotics, was chosen as the educational robot teaching assistant for four main reasons: (1) it is small in size and therefore more suitable for use in general classrooms; (2) it is designed for beginners and does not require much programming foundation, and it features a wide range of educational software; (3) it is relatively new in terms of design and hardware, and it has multiple functions in answering questions and engaging in interactions, such as touching the hand or the head, using voice, and a touchscreen.
The Kebbi robot teaching assistant employed as part of the curriculum design in this study had the following features: (1) it can be controlled by progressive programming or through communication with the robot, enabling it to perform related learning activities; (2) it has a human-like appearance, with a movable head, hands, and feet, and displays that can be used to simulate emotions; and (3) it has speech recognition technology and the ability to communicate with students in a conversational manner. The Kebbi robot teaching assistant is shown in Fig. 1.

Kebbi robot teaching assistant
Procedure
The curriculum was designed around the concept of “Smart City”. The content of the curriculum included the use of STEM interdisciplinary knowledge that led the students to gain an understanding of what equipment and devices were used in a smart city and how they functioned, and to establish a link with general academic knowledge. Instead of learning mere theoretical knowledge, the curriculum was integrated with the students’ daily lives, allowing them to practice what they had learned through the concept of programming as part of their knowledge acquisition process. The students then put their knowledge and ideas into practice through the concepts of programming to create a “smart garbage can” and a “smart streetlamp” as planned in this curriculum. The curriculum also included discussions of IT-related social issues (smart city) and the application and implementation of modular programming (smart streetlight and smart garbage can), and the programming language used in the curriculum was taught through motoBlockly. Figure 2 shows the teaching and learning process of the hands-on curriculum in this study. The curriculum commenced in Week 2 and proceeded through Week 11, consisting of three learning stages, including the completion of the smart city thematic activities.

Flow chart of the experimental design and implementation
During Stage 1, the teacher introduced the students to the concept of a smart city and taught them about fundamental Arduino operations, working principles, programming, and an understanding of the electronic components (see Fig. 3). The EG used Kebbi robots as a motivator at the beginning of each lesson to introduce them to the purpose of the lesson and the use of the robots, while the CG adopted an approach of verbal explanation and guidance from the teacher.

Learning Stage 1
During Stage 2, the students were given the opportunity to work on two smart city topics, learning about hands-on experimentation with Arduino and programming. It was expected that the students would work on one mini project every two weeks. The two themes were smart streetlights and smart trash cans, which were to be constructed using different combinations of Arduino components (see Fig. 4). The EG conducted hands-on work through interactive discussions and explorations with the Kebbi robots for problem solving, while the CG engaged in discussions among the students and was guided by the teacher.

Learning Stage 2
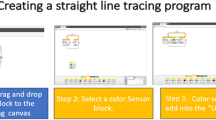
During Stage 3, the students chose a previously developed combination from the hands-on exercises to conceptualize and build their own smart city blocks based on the objectives and conditions given by the teacher. The students used the tools, programming language, and Arduino hands-on exercises that they had learned in the course to build their own smart cities, as shown in Fig. 5.

Learning Stage 3
The experiment was conducted as follows:
-
1.
Week 1: A pre-test on the students’ STEM knowledge and learning motivation (45 min) was conducted.
-
2.
Weeks 2 to 3: Learning Stage 1 of the curriculum was conducted. The teacher introduced the students to the concept of a smart city and provided them with 45 min of instruction each week on the Arduino Integrated Development Environment and the electronic components.
-
3.
Weeks 4 to 8: Learning Stage 2 of the curriculum was conducted. As part of the Smart City project, the students had the opportunity to perform hands-on work, learn Arduino programming, and apply Arduino implementations. A mini project was to be completed every two weeks by the students, taking 45 min each week to complete.
-
4.
Weeks 9 to 11: Learning Stage 3 of the curriculum was conducted. The implementation of the smart city mini projects involved their wiring design, functional design, cabin assembly, and integration module, which took 45 min per week.
-
5.
Week 12: A post-test on the students’ STEM knowledge, learning motivation, and hands-on performance (45 min) was conducted.
Development of Teaching and Learning Activities
The pedagogical structure used in this study was developed based on the 6E model, with the aim of producing a smart city (smart garbage cans and smart streetlights) to promote the concept of learning by doing, thereby further enhancing the students’ motivation to learn, and developing creative thinking skills.
The curriculum content of this study is based on the guidelines outlined in the Technology Curriculum Guidelines for eighth-grade information technology courses, which emphasize the concepts of modular programming and its application in problem-solving practical. The curriculum design has been collaboratively developed through discussions with teachers from relevant fields both within and outside the school, aligning with the learning objectives of information technology within the 2019 Curriculum Guidelines. It encompasses discussions on societal issues related to information technology, such as smart cities, as well as the application and implementation of modular programming through hands-on projects like Arduino smart streetlights and smart trash cans. The instructional language utilized in the course is motoBlockly, a block-based programming language. Examples of instructional activities are illustrated in Table 2.
The curriculum content for electronic components encompasses guiding students through interdisciplinary STEM knowledge to understand the composition of sensors and devices in the Internet of Things (IoT), along with their respective functions and principles. It aims to establish connections with conventional subject knowledge. The theme of "smart cities" is utilized as the focal point for practical implementation in the course. Students engage in modular practical activities involving temperature and humidity sensors, methane (MQ4) sensors, LCD displays, ultrasonic sensors, servo motors, and others. Through these activities, students learn about programming, electronic circuits, and the practical applications of sensors. They are required to work in groups to complete IoT project implementations, integrating and testing various modules learned in class, and debugging to create "smart trash cans" and "smart streetlights" based on the concept of "smart cities."
As our collaborating schools have already introduced Scratch to seventh-grade students, they have acquired a basic understanding of programming languages. Scratch provides a graphical interface that enables students to write programs by dragging and dropping blocks. Therefore, this study has opted for a similar platform, motoBlockly, to teach programming languages. MotoBlockly is also a block-based programming platform that facilitates learning programming through intuitive dragging and dropping of blocks. This allows students to learn and apply programming languages more effortlessly, building upon their existing foundation.
The EG used the 6E model and educational robots to implement the smart city curriculum, as shown in Fig. 6, which linked the correlation between the educational robots’ assistance, the 6E model, the teacher’s teaching, and the students’ learning. The CG used the 6E model only to implement the smart city curriculum, as shown in Fig. 7.

Implementation chart of the curriculum content of the EG

Implementation chart of the curriculum content of the CG
Measurement
STEM Knowledge Examination Paper (STEM KEP)
This study used the STEM knowledge examination paper compiled by the researcher under the theme of “Smart City”. A smart city generally refers to a city built based on information and communications technology, such as cloud computing, big data, and the Internet, as a solution to urban problems. The content of the examination paper covered the basic concepts of the programming language, electronic circuits, sensors, Arduino programming, and scientific principles. The test was conducted in a multiple-choice format, with the same number of questions for each knowledge area. The test consisted of 20 questions, each worth 5 points for a total score of 100 points. The question items of the examination paper were reviewed by internal and external experts, as well as teachers of the relevant subjects, and were revised according to the suggestions made to ensure the validity of the content. To confirm the discriminative power of the questions, item analysis was performed on the pre-test results from 104 participants. The participants were divided based on their scores into the top 27% (high-scoring group) and the bottom 27% (low-scoring group), each consisting of 28 participants. The results indicated significant differences (p < 0.05) between the high and low-scoring groups for each question (S1-S20), with critical ratios ranging from 3.0 to 4.77, thus affirming the discriminative power of the questions and negating the need for item deletion. Furthermore, the questionnaire demonstrated content validity and reliability, evidenced by a Cronbach's alpha coefficient of 0.673, indicating reliable internal consistency within the study's questionnaire.
Hands-on Performance
The Creative Product Assessment Matrix (CPAM) developed by Besemer and Treffinger (1981) was used in this study. The CPAM consists of three dimensions: Novelty, Resolution, and Elaboration and synthesis. Each of these dimensions has its own indicators and scoring criteria. For example, Novelty includes originality and surprise; Resolution includes value, logic, utility, and understanding; and Elaboration and synthesis includes basic quality, elegance, and mastery of techniques. Individual indicators were graded on a scale of 1 to 5, with each score supported by certain criteria based on the students’ final products, with a total of nine indicators and a total score of 45 points. The scorers were the researcher and the teachers of the original classes, and the scoring items were the students’ regular hands-on exercises and their smart city works. The scoring criteria for the hands-on exercises and the related ideas were developed through discussions between the researcher and the teachers of the original classes based on their common standards and consensus.
Motivation Scale
The Instructional Materials Motivation Survey (IMMS), developed based on the ARCS motivation model, will be used to assess students' learning motivation. The IMMS scale measures students' attention, relevance, confidence, and satisfaction, thereby understanding their perceptions. Such quantitative analysis can provide deeper insights, helping to optimize instructional design to better facilitate student learning and development. The original version of the IMMS is divided into four dimensions: 12 questions on attention, nine questions on relevance, nine questions on confidence, and six questions on satisfaction, for a total of 36 questions, which are scored on a 5-point Likert scale. To confirm the quality of the scale, it was translated by the researcher, and then modified according to experts’ suggestions. In addition, a pre-test was conducted with 104 8th-grade students from the same junior high school. After analyzing the correlation between the items and the students’ total scores and performing reliability analyses, the researcher eliminated items with total correlation coefficients below 0.3, which were A04, A05, A08, A11, C02, C04, C06, and C08. The overall Cronbach’s α was found to be 0.966 after eliminating these items, indicating that the reliability of the scale was good. Moreover, the reliability of each dimension ranged from 0.871 to 0.907, which was considered good, and the detailed results are shown in Table 3.
Data Collection, Processing, and Analysis
The researcher contacted a junior high school in Taipei City for collaboration and obtained permission from the teachers and parents of the participants to videotape the classroom content and collect data. STEM KEP and CPAM data were distributed normally according to skewness and kurtosis values. Moreover, analysis of covariance (ANCOVA) was conducted to determine whether there were statistically significant differences between the post-tests of the EG and the CG and to eliminate the effect of internal validity between the EG and the CG on the pre-tests. The eta-square (effect size) coefficient was used to determine the ability of independent variables to influence dependent variables. The high- and low-scoring groups distinguished by learning motivation were also analyzed using ANCOVA, with the pre-test of hands-on performance as a covariate, the groups as the independent variable, and the post-test of hands-on performance as a dependent variable, to explore the association between the students’ learning motivation and their hands-on performance.
Results
Influence of Different Teaching Strategies on STEM Knowledge
Table 4 lists the statistics of the students’ STEM knowledge performance. The pre-test scores achieved by both the EG and the CG were quite low. The main reason for this was that both groups of students were almost new to the content of the curriculum design of this study, and they had only a brief understanding of block-based visual programming language because the partner school had already taught them Scratch in Grade 7. However, after the implementation of different pedagogical approaches, the post-tests of both groups showed considerable improvement, and the EG showed greater improvement than the CG. According to the results of ANCOVA, the homogeneity of regression (F = 0.52, p = 0.18 > 0.05) indicated that the use of ANCOVA was appropriate. The results of ANCOVA also showed that the EG achieved significantly better scores (F = 14.52, p < 0.001) than the CG. In addition, the ŋ2 value was provided as a substitute for effect size: ŋ2 = 0.13 (0.06 < ŋ2 < 0.138, medium effect) (Cohen, 1988).
Influence of Different Teaching Strategies on Hands-on Performance
Table 5 presents the outcomes of the students' hands-on performance evaluation. Each group of students built their own smart cities, which was divided into two training units, hands-on practice and smart city product. Since there was no pretest for hands-on performance, the study treated the “hands-on practice” scores as a pretest and the “smart city product” scores as the posttest. To verify the differences in the students’ hands-on performance with different teaching strategies, ANCOVA was used to compare the differences between the two groups. The homogeneity of regression (F = 1.34, p = 0.25 > 0.05) showed that the use of ANCOVA was appropriate. The ANCOVA results demonstrated that the EG achieved significantly better scores (F = 11.20, p < 0.001). In addition, the ŋ2 value was provided as a substitute for effect size ŋ2 = 0.10 (ŋ2 < 0.138 = medium effect) (Cohen, 1988). Figure 8 shows the comparison between the high- and low-scoring groups in terms of learning motivation. In the high-scoring group, it was found that: (1) the sensors were arranged according to the students’ preferred positions; (2) the appearance was properly designed, and the garbage cans were covered with garbage bags; and (3) the wiring was complete, with positive and negative electrodes correctly connected.

Comparison of the hands-on work of the high- and low-scoring groups
Influence of Different Teaching Strategies on Students’ Motivation
Table 6 lists the statistical data for the students’ motivation. The scores of the post-test for the two groups were better than the scores of the pre-test, which showed that the 6E instructional strategy in this study was helpful in enhancing the students’ motivation. To verify the differences in the students’ learning motivation with different teaching strategies, ANCOVA was used to compare the differences between the two groups. The homogeneity of regression (F = 0.52, p = 0.37 > 0.05) showed that the use of ANCOVA was appropriate. The results of ANCOVA demonstrated that the EG achieved significantly better scores (F = 5.50, p < 0.05). In addition, the ŋ2 value was provided as a substitute for effect size: ŋ2 = 0.05 (0.06 ≧ ŋ2, small effect) (Cohen, 1988).
Investigation of the Correlation between the High- and Low-scoring Groups in Learning Motivation and Hands-on Performance
As shown in Table 7, the researcher examined the hands-on performance of both the EG and the CG. Based on the students’ scores for learning motivation in the post-test, the top 40% and the bottom 40% (20 students each) in the EG and the CG were categorized as the high-scoring group (H) and the low-scoring group (L), respectively, with the purpose of investigating the effects of the students’ learning motivation on their hands-on performance. The high- and low-scoring groups were the fixed factors, the pre-test scores of hands-on performance the covariate, and the post-test scores of hands-on performance the dependent variable. The combinations were as follows: the high-motivation group in the Experimental Group versus the low-motivation group in the Experimental Group (EG_H versus EG_L); the high-motivation group in the Control Group versus the low-motivation group in the Control Group (CG_H versus CG_L); the high-motivation group in the Experimental Group versus the high-motivation group in the Control Group (EG_H versus CG_H); the low-motivation group in the Experimental Group versus the low-motivation group in the Control Group (EG_L versus CG_L); the low-motivation group in the Experimental Group versus the high-motivation group in the Control Group (EG_L versus CG_H); and the high-motivation group in the Experimental Group versus the low-motivation group in the Control Group (EG_H and CG_L). A total of six combinations of groups were analyzed by descriptive statistics and ANCOVA, and the results were as follows: F = 5.71, p = 0.02 < 0.05 for EG_H versus EG_L, achieving a significant effect with a medium effect size; F = 0.20, p = 0.66 for CG_H versus CG_L, not significant; F = 29.74, p < 0.001 for EG_H versus CG_H, achieving a significant effect with a high effect size; F = 4.95, p = 0.03 < 0.05 for EG_L versus CG_L, achieving a significant effect with a high effect size; F = 6.01, p = 0.02 < 0.05 for EG_L versus CG_H, achieving a significant effect with a medium effect size; and F = 30.77, p < 0.001 for EG_H versus CG_L, achieving a significant effect with a high effect size. To summarize these results, as shown in Fig. 9, intra-group variations were found only in the EG, whereas the CG demonstrated more consistency. Comparisons between groups showed that there were significant differences in the four combinations of EG_H versus CG_H, EG_L versus CG_L, EG_L versus CG_H, and EG_H versus CG_L, and that the high- and low-scoring groups in the Experimental Group all scored higher than those in the Control Group.

Comprehensive comparison of learning motivation and hands-on performance between the high- and low-scoring groups
Discussion
Influence of Different Teaching Strategies on STEM Knowledge
In this study, after adopting different modes of teaching, the relevant data of the pre-tests and post-tests were subjected to descriptive statistics and ANCOVA with the aim of understanding their effects on the students’ learning outcomes. In terms of STEM knowledge, both the EG and the CG showed considerable progress, but the EG demonstrated more significant progress than the CG. To confirm whether there was a difference between the two groups, ANCOVA was conducted and the results showed that the EG achieved a significantly higher level of improvement compared with the CG after excluding the effect of the pre-test. The results indicated that the 6E model allowed the students to spend more time thinking, organizing, and discussing STEM-related knowledge in the classroom, which in turn positively influenced their cognitive outcomes. In the EG, the students learned in a more relaxed environment due to the incorporation of educational robots (Chevalier et al., 2020). Furthermore, when the students encountered problems, they sought assistance from the robots more promptly and acquired the corresponding knowledge more quickly (Daniela & Lytras, 2019), which allowed them to perform more effectively than the CG in the knowledge domain.
Influence of Different Teaching Strategies on Motivation
From the results of this study, after excluding the effect of the pre-test, the learning motivation of the EG was significantly higher than that of the CG, meaning that the incorporation of the educational robots effectively enhanced the students’ learning motivation. It was hypothesized by the researcher that the results were due to the fact that educational robots were incorporated into the EG as teaching assistants for the curriculum, and the robots used a more relatable tone even after answering to encourage the students not to give up so easily. Moreover, at the beginning of each lesson, the robots explained the key points of that lesson, reminding the students that they could ask for advice whenever they encountered any problems. The educational robots were also equipped with functions such as speech, facial expressions, and gestures, and thus they were more like real people who facilitated the students’ learning (Chao et al., 2023; Hong et al., 2016). Therefore, with the incorporation of educational robots as teaching assistants, the students in the EG exhibited a higher level of motivation to learn, which was also consistent with the findings of Chao et al. (2023).
Influence of Different Teaching Strategies on Hands-on Performance
In terms of hands-on performance, both groups demonstrated considerable improvement, and after conducting ANCOVAs and excluding the effect of the pre-test, the EG significantly outperformed the CG, confirming the findings of previous studies, that the combination of the 6E model and a hands-on STEM curriculum enhanced the students’ hands-on performance (Burke, 2014; Chen, 2022). For the EG, due to the incorporation of the educational robots with a gamification system as teaching assistants, it was hypothesized that the students would seek timely help from the robots and discuss with their group members when they encountered problems in the hands-on exercises, and that they would not only obtain answers from the robots but also enjoy the knowledge acquisition process more, which echoed the results of previous scholars who suggested the integration of educational robots in teaching (You et al., 2021). The teacher likewise had more capacity to take care of the students’ learning conditions and provide timely guidance to them. For the CG, they could only discuss with their group members, and if the teacher was busy and could not provide timely feedback, this resulted in a gradual decrease in the thirst for knowledge. Moreover, if they wanted to review or confirm their learning status, they could only do so by using the lesson worksheets given by the teacher and during the review time at the end of each lesson. These findings and explanations showed the difference in learning effectiveness between the EG and the CG.
Analysis of High- and Low-scoring Groups regarding Learning Motivation and Students’ Performance on Hands-on Activities
This study employed ANCOVA to investigate how varying levels of learning motivation affected students' hands-on performance and to delve into the relationships between these variables. The analysis involved comparing the Experimental Group (EG) and Control Group (CG), segmenting each into high- and low-scoring subgroups based on the top and bottom 40% of performers. Figure 9 illustrates these results, intra-group variations were found only in the EG, whereas the CG demonstrated more consistency. This disparity was hypothesized to be a result of the shared use of each robot among four to five students in the EG, leading to more engaged students interacting more frequently with the robots and thus creating a gap between the high- and low-performing subgroups. Inter-group comparisons highlighted significant differences in all four combinations: EG_H vs. CG_H, EG_L vs. CG_L, EG_L vs. CG_H, and EG_H vs. CG_L. Notably, both the high- and low-scoring subgroups in the EG outperformed their CG counterparts. The statistical analysis confirmed a significant impact of learning motivation on hands-on performance, indicating that students with higher motivation achieved better practical results. This finding aligns with Hsiao et al. (2023) research, underscoring the positive correlation between student motivation and hands-on performance proficiency.
Limitations and Future Research
This study has a few limitations. First, although the content of this study was modified to fit the junior high school curriculum, the students’ prior knowledge and cognitive load had to be taken into consideration, and the results may have affected the internal validity of the study. Second, given the administrative considerations of the participating school, it was not possible to conduct random sampling and assignment of the participants, and the researcher’s personal teaching style and grading scale might have affected the performance of the students. Finally, the study did not account for the impact of other courses, which could have affected the internal validity of the results. Future related research should focus on addressing these limitations and delve deeper into the impact of other courses on students' STEM learning outcomes.
The future planning of related studies should give more consideration to strengthening the skills and knowledge associated with hands-on activities to enable students to produce finished products without being limited by their own handicraft skills. If the number of users of each robot can be reduced in the future to promote more interaction between students and robots, it may have an even better influence on students’ learning. Looking forward, if the curriculum is to be implemented at the junior high school level, in addition to streamlining the complexity of the hands-on tasks, it should also be implemented in more consecutive class periods, such as two consecutive classes or during interest club sessions, thus allowing for a more coherent and complete learning experience for students.
Conclusion
In summary, the 6E model and educational robots are effective training tools for increasing students’ STEM knowledge, learning motivation, and hands-on performance. The students who utilized educational robots as teaching assistants in this study received immediate assistance and made more progress, proving the effectiveness of this mode of instruction in improving hands-on STEM activities. In addition, the curriculum was designed using motoBlockly, a block-based programming language and tool that develops many modular blocks with considerable versatility, which allowed the instructor to freely choose the content needed for teaching, and it was easy for the 8th-graders to use. In terms of curriculum planning, the theme “Smart City” was chosen for designing the content because it was related to daily life. This not only brought the content closer to the students’ learning but also allowed them to put what they saw and heard into practice during the lessons. This made the students more motivated to learn, and also made it easier for them to achieve the goals set by the teacher. Although educational robots still have limitations and are not yet mature enough to meet all the needs of teachers, as they evolve, they have the potential to become a more effective teaching tool for teachers.
Data Availability
For ethical reasons and restrictions, the datasets used and analyzed for the paper are not publicly available. However, any inquiries concerning the materials are welcomed.
Abbreviations
- 6E:
-
Engage, Explore, Explain, Engineer, Enrich, and Evaluate.
- CPAM:
-
Creative Product Analysis Matrix
- ITEEA:
-
International Technology and Engineering Educators Association
- STEM:
-
Science, Technology, Engineering, and Mathematics
- STEM KEP:
-
STEM Knowledge Examination Paper
References
Anwar, S., Bascou, N. A., Menekse, M., & Kardgar, A. (2019). A systematic review of studies on educational robotics. Journal of Pre-College Engineering Education Research, 9(2), 19–42. https://doi.org/10.7771/2157-9288.1223
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati, B., & Tanaka, F. (2018). Social robots for education: a review. Science Robotics, 3(21), 59–68. https://doi.org/10.1126/scirobotics.aat59
Besemer, S. P., & Treffinger, D. J. (1981). Analysis of creative products: Review and synthesis. The Journal of Creative Behavior, 15(3), 158–178.
Breiner, J. M., Harkness, S. S., Johnson, C. C., & Koehler, C. M. (2012). What is STEM? a discussion about conceptions of STEM in education and partnerships. School Science and Mathematics, 112(1), 3–11. https://doi.org/10.1111/j.1949-8594.2011.00109.x
Burke, B. N. (2014). The ITEEA 6E learning ByDesign™ model: maximizing informed design and inquiry in the integrative STEM classroom. Technology and Engineering Teacher, 73(6), 14–19.
Chang, C. C., & Chen, Y. (2022). Using mastery learning theory to develop task-centered hands-on STEM learning of Arduino-based educational robotics: Psychomotor performance and perception by a convergent parallel mixed method. Interactive Learning Environments, 30(9), 1677–1692. https://doi.org/10.1080/10494820.2020.1741400
Chao, J. Y., Liu, C. H., & Kao, H. C. (2023). Science, technology, engineering, and mathematics curriculum design for teaching mathematical concept of perspective at indigenous elementary school using robots. Sensors and Materials, 35(5), 1547–1556.
Chen, J. C. (2022). Developing a cycle-mode POED model and using scientific inquiry for a practice activity to improve students’ learning motivation, learning performance, and hands-on ability. Interactive Learning Environments, 30(7), 1252–1264. https://doi.org/10.1080/10494820.2020.1716023
Chen, T. I., Lin, S. K., & Chung, H. C. (2023). Gamified educational robots lead an increase in motivation and creativity in STEM education. Journal of Baltic Science Education, 22(3), 427–438.
Chen, Y., & Chang, C. (2018). The impact of an integrated robotics STEM course with a sailboat topic on high school students’ perceptions of integrative STEM, interest, and career orientation. Eurasia Journal of Mathematics, Science and Technology Education, 14(12), em1614. https://doi.org/10.29333/ejmste/94314
Chevalier, M., Giang, C., Piatti, A., & Mondada, F. (2020). Fostering computational thinking through educational robotics: a model for creative computational problem solving. International Journal of STEM Education, 7(1), 1–18. https://doi.org/10.1186/s40594-020-00238-z
Chew, S. L., & Cerbin, W. J. (2021). The cognitive challenges of effective teaching. The Journal of Economic Education, 52(1), 17–40. https://doi.org/10.1080/00220485.2020.1845266
Ching, Y. H., Hsu, Y. C., & Baldwin, S. (2018). Developing computational thinking with educational technologies for young learners. TechTrends, 62(6), 563–573. https://doi.org/10.1007/s11528-018-0292-7
Cohen, J. (1988). Statistical power analysis for the behavioral sciences (2nd ed.), Hillsdale, NJ: Lawrence Erlbaum Associates Inc.
Daniela, L., & Lytras, M. D. (2019). Educational robotics for inclusive education. Technology, Knowledge and Learning, 24(2), 219–225. https://doi.org/10.1007/s10758-018-9397-5
Eguchi, A. (2016). RoboCupJunior for promoting STEM education, 21st century skills, and technological advancement through robotics competition. Robotics and Autonomous Systems, 75, 692–699. https://doi.org/10.1016/j.robot.2015.05.013
Good, T. L., & Lavigne, A. L. (2017). Looking in classrooms. Routledge.
Hashim, H., Ali, M. N., & Shamsudin, M. A. (2018). Enhancing an entrepreneurial mindset in secondary school students by introducing the green-STEM project via the integration of the 6E instructional model. Journal of Science and Mathematics Education in Southeast Asia, 41(2), 173–192.
Hong, Z. W., Huang, Y. M., Hsu, M., & Shen, W. W. (2016). Authoring robot-assisted instructional materials for improving learning performance and motivation in EFL classrooms. Journal of Educational Technology & Society, 19(1), 337–349. https://www.jstor.org/stable/jeductechsoci.19.1.337
Hsiao, H. S., Chen, J. C., Chen, J. H., Chien, Y. H., Chang, C. P., & Chung, G. H. (2023). A study on the effects of using gamification with the 6E model on high school students’ computer programming self-efficacy, IoT knowledge, hands-on skills, and behavioral patterns. Educational Technology Research and Development, 71(4), 1821–1849. https://doi.org/10.1007/s11423-023-10216-1
Hsiao, H. S., Lin, Y. W., Lin, K. Y., Lin, C. Y., Chen, J. H., & Chen, J. C. (2022). Using robot-based practices to develop an activity that incorporated the 6E model to improve elementary school students’ learning performances. Interactive Learning Environments, 30(1), 85–99. https://doi.org/10.1080/10494820.2019.1636090
Hu, Y. H., Fu, J. S., & Yeh, H. C. (2023). Developing an early-warning system through robotic process automation: Are intelligent tutoring robots as effective as human teachers? Interactive Learning Environments, 1–14. https://doi.org/10.1080/10494820.2022.2160467
Keller, J. M. (1987). Development and use of the ARCS model of instructional design. Journal of Instructional Development, 10(3), 2–10.
Keller, J. M. (1999). Using the ARCS motivational process in computer-based instruction and distance education. New Directions for Teaching and Learning, 1999(78), 37–47. https://doi.org/10.1002/tl.7804
Keller, J. M. (2009). Motivational design for learning and performance: The ARCS model approach. Springer Science & Business Media.
Kim, T. H., Ramos, C., & Mohammed, S. (2017). Smart city and IoT. Future Generation Computer Systems, 76, 159–162. https://doi.org/10.1016/j.future.2017.03.034
Law, K. M., Geng, S., & Li, T. (2019). Student enrollment, motivation and learning performance in a blended learning environment: The mediating effects of social, teaching, and cognitive presence. Computers & Education, 136(1), 1–12. https://doi.org/10.1016/j.compedu.2019.02.021
Leonard, J., Buss, A., Gamboa, R., Mitchell, M., Fashola, O. S., Hubert, T., & Almughyirah, S. (2016). Using robotics and game design to enhance children’s self-efficacy, STEM attitudes, and computational thinking skills. Journal of Science Education and Technology, 25, 860–876. https://doi.org/10.1007/S10956-016-9628-2
Lin, K. Y., Hsiao, H. S., Williams, P. J., & Chen, Y. H. (2020). Effects of 6E-oriented STEM practical activities in cultivating middle school students’ attitudes toward technology and technological inquiry ability. Research in Science & Technological Education, 38(1), 1–18. https://doi.org/10.1080/02635143.2018.1561432
Lu, G., Xie, K., & Liu, Q. (2022). What influences student situational engagement in smart classrooms: Perception of the learning environment and students’ motivation. British Journal of Educational Technology, 53(6), 1665–1687. https://doi.org/10.1111/bjet.13204
Ministry of Education (MOE). (2018). Curriculum guidelines of 12-year basic education: Science. Taipei: MOE.
Moro, M., Agatolio, F., & Menegatti, E. (2018). The RoboESL Project: Development, evaluation and outcomes regarding the proposed robotic enhanced curricula. International Journal of Smart Education and Urban Society, 9(1), 48–60. https://doi.org/10.4018/IJSEUS.2018010105
Nadelson, L. S., & Seifert, A. L. (2017). Integrated STEM defined: Contexts, challenges, and the future. The Journal of Educational Research, 110(3), 221–223. https://doi.org/10.1080/00220671.2017.1289775
Papert, S. (1980). Mindstorms: Children, computers and powerful ideas. Basic Books.
Papert, S. (1984). New theories for new learnings. School Psychology Review, 13(4), 422–428.
Reyes, G. E. B., López, E., Ponce, P., & Mazón, N. (2021). Role assignment analysis of an assistive robotic platform in a high school mathematics class, through a gamification and usability evaluation. International Journal of Social Robotics, 13, 1063–1078. https://doi.org/10.1007/s12369-020-00698-x
Striepe, H., Donnermann, M., Lein, M., & Lugrin, B. (2021). Modeling and evaluating emotion, contextual head movement and voices for a social robot storyteller. International Journal of Social Robotics, 13, 441–457. https://doi.org/10.1007/s12369-019-00570-7
Struyf, A., De Loof, H., Boeve-de Pauw, J., & Van Petegem, P. (2019). Students’ engagement in different STEM learning environments: Integrated STEM education as promising practice? International Journal of Science Education, 41(10), 1387–1407. https://doi.org/10.1080/09500693.2019.1607983
Xu, W., & Ouyang, F. (2022). The application of AI technologies in STEM education: A systematic review from 2011 to 2021. International Journal of STEM Education, 9(1), 59. https://doi.org/10.1186/s40594-022-00377-5
You, H. S., Chacko, S. M., & Kapila, V. (2021). Examining the effectiveness of a professional development program: Integration of educational robotics into science and mathematics curricula. Journal of Science Education and Technology, 30, 567–581. https://doi.org/10.1007/s10956-021-09903-6
Acknowledgements
This work was financially supported by the “Institute for Research Excellence in Learning Sciences” of National Taiwan Normal University (NTNU) from The Featured Areas Research Center Program within the framework of the Higher Education Sprout Project by the Ministry of Education (MOE) in Taiwan, and sponsored by the National Science and Technology Council, Taiwan, R.O.C.
Funding
This research was funded by the National Science and Technology Council, Taiwan, R.O.C. under Grant no. 110-2511-H-003 -023 -MY3, 110-2622-H-003 -009, 111-2622-H-003 -006, 111-2410-H-003 -017, 112-2410-H-003 -098 -MY3.
Author information
Authors and Affiliations
Contributions
HSH designed and facilitated this research and completed the instruction work in this research; PHL conducted the experiment and wrote the first draft of the manuscript; TLC analyzed the data and proofread the first draft of the manuscript; GHC facilitated data analysis and revised the manuscript; JHC built connections with the experimental school and proofread the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethical Approval
This study was approved by Ethics Committee of National Taiwan Normal University (REC Number:202305HS074) All the parents of participants signed an informed consent form before the experiment. Consistent with the approved protocol, they were informed that they had the right to withdraw from the experiment at any time. All the information collected in the experiment was used only for the purpose of research.
Competing Interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Hsiao, HS., Chen, JH., Chang, Tl. et al. A Study on the Effects of Using the 6E Model and a Robot Teaching Assistant on Junior High School Students’ STEM Knowledge, Learning Motivation, and Hands-on Performance. J Sci Educ Technol 33, 759–778 (2024). https://doi.org/10.1007/s10956-024-10119-7
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10956-024-10119-7