
Abstract
In this paper we present an experimental investigation of effects of external rotating helical field (RHF) on magnetic field fluctuations around the IR-T1 tokamak chamber. For this purpose, two magnetic pickup coils were designed, constructed, and installed on the outer surface of the IR-T1 tokamak chamber, and then from their output signals after compensation and integration, poloidal and normal components of the magnetic fields measured. Experimental results show that presence of RHF with L = 3 mode can improve the plasma confinement by flatting the plasma current and reducing the amplitude of magnetic field fluctuations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Measurement of magnetic field fluctuation of plasma is important in tokamaks experiments, especially in study of plasma equilibrium and magnetohydrodynamics activities. Magnetic diagnostics, in particular magnetic pickup coils are commonly used in tokamaks to measure the fluctuation of magnetic field induced by the plasma. In this paper we present experimental study of effects of rotating helical field (RHF) (RHF is an external helical magnetic field which can improve the tokamak plasma confinement) on fluctuation of magnetic field around the IR-T1 tokamak chamber, which it is a small, low beta and large aspect ratio tokamak with a circular cross section (see Table 1) [1–5]. In the next section we will present basic approach in magnetic field measurement using magnetic pickup coils. Next, we will present design and construction of magnetic pickup coils. RHF setup on IR-T1 will be presented in the following section. Finally, experimental results of measurement of magnetic field fluctuations in presence of RHF will be followed by summary and discussion.
Basic Approach in Measurement of Magnetic Field Using Magnetic Pickup Coils
In general, the magnetic sensors (magnetic probes) works by Faraday’s law and measures component(s) of the local magnetic fields or magnetic fluxes for use in plasma control, equilibrium reconstruction and detection of plasma energy, poloidal beta, and MHD instabilities.
Magnetic probe consists of a coil in solenoidal form, which whose dimensions are small compared to the gradient scale length of the magnetic field. A total magnetic flux passed through such a coil is ΦB = nAB, where n is the number of turns of coil, A is the average area of cross section of coil, and B is the local magnetic field parallel to the coil axis (see Fig. 1).

Schematic representation of the magnetic pickup coil
The output signal from the magnetic probe is:
where ω is the frequency of the fluctuations of the magnetic field, the average area of the probe is determined by assumption that the diameter of the coil is equal to mean value d m = (d i + d o)/2, thus: A = π(d i + d o)/16.
Design and Construction of the Magnetic Pickup Coils
Main design parameters of the magnetic pickup coils are its frequency response and sensitivity. We selected the frequency response of the magnetic probe, 22 kHz for this work and multi-purposes works for future. Therefore, we designed the probe in this frequency region. Thus first input value for designing the magnetic probe is the frequency response; the second input value is the sensitivity of the magnetic probe, and third relation is the ohm law. The coil resistance, coil inductance, winding turns of coil, length of coil, and coil radius, are the five interrelated desired parameters. Because of parameters multiplicity and relation limitation, these parameters must be obtained from the three basic relations mentioned above. The first basic relation which mentioned is the frequency response of coil:
where F is a constant which depending on the ratio of the coil length l to its radius r (for r/l = 2, F = .029) the second relation is the famous ohm law:
where l′ and A′ are the length of total wire which used, and cross section area of the wire. The third relation is the sensitivity of the magnetic probe:
Therefore, we introduced the values of two desired sensitivity and frequency response, and then other parameters obtained from above three relations. In order to calibration of the magnetic probe, it must be inserted into a homogeneous magnetic field of known amplitude B and frequency ω, and then effective value of the nA obtained. For this purpose we insert the magnetic probe inside the Helmholtz coil.
The homogeneous magnetic field between the Helmholtz coils is:
where µ0, n, I, and a are, respectively, the permeability of the free space, number of turns, current and radius of the Helmholtz coils.
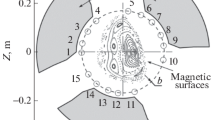
In the IR-T1 tokamak, two magnetic probes were designed and constructed, one magnetic probe was installed on the outer surface of the radius b = 16.5 cm in angle of θ = 0 to detect the tangential component of the magnetic field B θ and one magnetic probe is also installed below the chamber, θ = 3π/2, to detect the normal component of the magnetic field B ρ, as shown in Fig. 2.

Positions of the two magnetic probes on the outer surface of the IR-T1 tokamak chamber
After compensation of the magnetic pickup coils outputs (discharge done without plasma and subtraction of the coils output from total signals) and integration of them, magnetic fields obtained. Design parameters of the magnetic pickup coils present in Table 2.
Resonant Helical Field (RHF) Setup on IR-T1 Tokamak
The RHF is an external helical magnetic field which can improve the tokamak plasma confinement. In the IR-T1, this field is produced by two winding with optimized geometry conductors wound externally around the tokamak chamber with a given helicity. The minor radius of these helical windings are 21 cm (L = 2, n = 1) and 22 cm (L = 3, n = 1) and also major radius is 50 cm. In this experiment, the current through the helical windings was between 200 and 300 A, which is very low compared with the plasma current (32 kA).
Experimental Results of Effects of RHF on Magnetic Field Fluctuations Around the Tokamak Chamber
We used the circuit as shown in Fig. 3, for the measurement of induced voltage V i(t) in the magnetic probes:

Electric circuit used for magnetic probes
As shown in the Fig. 3, I(t) is the current in the magnetic probe circuit and V s(t) is the coaxial cable output signal. The application of Kirchhoff’s voltage law for this circuit yields the following equation:
where r s is the probe resistivity and r c the cable resistivity and L s probe self-inductance. This expression is valid if the frequency of the interest signal ω, is much smaller than the natural oscillation frequency of the coil (resonant frequency) \( \omega_{r} = 1/\sqrt {L_{s} C_{s} } \). In this case, and since C c is smaller than C s, the capacitive reactance 1/ω(C s + C c) is greater than the inductive reactance ωL s, such that for practical reasons the sum of the capacitances can be neglected. These conditions are satisfied in the measurement system composed of the magnetic probes.
From the circuit of Fig. 3, we have:
and:
So, the integrator output V 0(t) of magnetic probes is given by:
where, RC is the integrator time constant and Eq. (9) is the voltage that we measured after integrating the probe signal. Moreover, V i is the inductive voltage supplied by each one of the magnetic pickup coils, where installed around the vacuum chamber of the IR-T1 tokamak.
Therefore, the magnetic field can be obtained:
Experimental results as presented in the Figs. 4, 5, 6, and 7, show that presence of RHF with L = 3 mode in time interval of 13–25 ms can improve the plasma confinement by flatting the plasma current and reducing the amplitude of magnetic field fluctuations.

a Plasma current, b loop voltage, c poloidal magnetic field, and d vertical magnetic field in absence of RHF

a Plasma current, b loop voltage, c poloidal magnetic field, and d vertical magnetic field in presence of RHF (L = 2 mode) at 13–25 ms

a Plasma current, b loop voltage, c poloidal magnetic field, and d vertical magnetic field in presence of RHF (L = 3 mode) at 13–25 ms

a Plasma current, b loop voltage, c poloidal magnetic field, and d vertical magnetic field in presence of RHF (L = 2 & 3 mode) at 13–25 ms
Summary and Discussion
In this paper we presented an experimental investigation of effects of external rotating helical field (RHF) on magnetic field fluctuations around the IR-T1 tokamak chamber. For this purpose, array of magnetic pickup coils were designed, constructed, and installed on the outer surface of the IR-T1 tokamak chamber, and then from their output signals after compensation and integration, magnetic field measured. Experimental results show that presence of RHF with L = 3 mode can improve the plasma confinement by flatting the plasma current and reducing the amplitude of magnetic field fluctuations.
Change history
23 July 2024
This article has been retracted. Please see the Retraction Notice for more detail: https://doi.org/10.1007/s10894-024-00452-5
References
J. Wesson, Tokamaks (Clarendon, Oxford, 1997)
J.P. Freidberg, Ideal MHD (Clarendon, Oxford, 1987)
I.H. Hutchinson, Principles of Plasma Diagnostics (Cambridge University Press, Cambridge, 1987)
A. Salar Elahi et al., J. Fusion Energ. (2009). doi:10.1007/s10894-009-9198-x
E.J. Strait et al., Magnetic diagnostics. Fusion Sci. Technol. 53, 304–334 (2006)
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Salar Elahi, A., Ghoranneviss, M. RETRACTED ARTICLE: Plasma Magnetic Fluctuations Measurement on the Outer Surface of IR-T1 Tokamak. J Fusion Energ 29, 1–4 (2010). https://doi.org/10.1007/s10894-009-9218-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10894-009-9218-x