
Abstract
The aim of this paper is to extend the results associated with periodic orbits from two-dimensions to higher-dimensions. Because of the one-to-one correspondence between solutions for the monotone recurrence relation and orbits for the induced high-dimensional cylinder twist map, we consider the system of solutions for monotone recurrence relations instead. By introducing intersections of type (k, l), we propose the definition of generalized Birkhoff solutions, generalizing the concept of Birkhoff solutions. We show that if there is a (p, q)-periodic solution which is not a generalized Birkhoff solution, then the system has positive topological entropy and the Farey interval of p/q is contained in the rotation set.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
There have been extensive and profound investigations of periodic orbits for maps of the annulus or two-dimensional cylinder. The main purpose of this paper is to study the relation among periodic orbits, rotation sets and the complexity of systems on the high-dimensional cylinder.
Before proceeding futher, we need to review the definition of monotone recurrence relations of type (k, l) for \(k,l\in {\mathbb {N}}\), which are equations as follows:
where \(\Delta :{\mathbb {R}}^{k+l+1}\rightarrow {\mathbb {R}}\) is a continuous function with following hypotheses:
-
(H1)
\(\Delta (x_{-k},\cdots ,{x_0},\cdots ,x_{l})\) is a nondecreasing function of all the \(x_{j}\) except \(x_{0}\). Moreover, it is strictly increasing in \(x_{-k}\) and \(x_l\),
-
(H2)
\(\Delta (x_{-k}+1,\cdots ,x_{l}+1)=\Delta (x_{-k},\cdots ,x_{l})\),
-
(H3)
\(\lim _{x_{-k}\rightarrow \pm \infty }\Delta (x_{-k},\cdots ,x_l)=\pm \infty \) and \(\lim _{x_{l}\rightarrow \pm \infty }\Delta (x_{-k},\cdots ,x_l)=\pm \infty \).
Hypotheses (H1) and (H3) implies that we can solve (1.1) for \(x_{i+l}\) if \((x_{i-k},\cdots ,x_{i+l-1})\) is given, or \(x_{i-k}\) if \((x_{i-k+1},\cdots , x_{i+l})\) is given, thereby generating a homeomorphism map \(F_{\Delta }:{\mathbb {R}}^{k+l}\rightarrow {\mathbb {R}}^{k+l}\) by
According to the periodicity hypothesis (H2), we obtain on the high-dimensional cylinder \({\mathbb {T}}^1\times {\mathbb {R}}^{k+l-1}\) a homeomorphism \(\varphi _\Delta \) which is a generalization of the class of monotone twist maps of the annulus or two-dimensional cylinder [2]. Especially for \(k=l=1\), the induced map \(\varphi _\Delta \) coincides with the classical monotone twist map.
For instance,
corresponds to the standard map \(\varphi _\Delta \) as
If a configuration \({{\textbf{x}}}=(x_i)\) satisfies (1.1), then we say \({{\textbf{x}}}\) is a solution of (1.1). Further, a solution \({{\textbf{x}}}=(x_i)\) is said to be with bounded action if there exists a constant \(L>0\) such that \(|x_{i+1}-x_i|\le L\) for all \(i\in {\mathbb {Z}}\). Then the system generated by solutions for (1.1) with bounded action is equivalent to that by \(\varphi _\Delta \) on the high-dimensional cylinder restricted to orbits with bounded action. Therefore, we would study the dynamical behavior of solutions for (1.1) rather than \(\varphi _\Delta \).
Let \({{\textbf{x}}}=(x_i)\) be a solution of (1.1) with bounded action. Define the forward rotation interval of \({{\textbf{x}}}\) to be [11, 22, 23, 25]
and the backward rotation interval \(\rho ^*({{\textbf{x}}})\) similarly for \(n\rightarrow -\infty \). If \(\rho ({{\textbf{x}}})\) \((\rho ^*({{\textbf{x}}}))\) is a single point, i.e., the limit \(\lim _{n\rightarrow +\infty }x_n/n\) \((\lim _{n\rightarrow -\infty }x_n/n)\) exists, then \({{\textbf{x}}}\) is said to have a forward (backward) rotation number. We say \({{\textbf{x}}}\) has a rotation number if \(\rho ({{\textbf{x}}})=\rho ^*({{\textbf{x}}})\) is a singleton.
The rotation set \(\rho (\Delta )\) is defined to be the union of \(\rho ({{\textbf{x}}})\), where \({{\textbf{x}}}=(x_i)\) is a solution of (1.1) with bounded action.
Our first concern will be the relation between periodic orbits and topological entropy. With the help of topological methods, Hall showed [18] that each monotone twist map which has a (p, q)-periodic orbit certainly has a (p, q)-periodic Birkhoff orbit. After that, an analogous result [10] has been derived by Boyland for more general homeomorphisms of the annulus.
The question is whenever (p, q)-periodic orbits for the monotone twist map are exactly (p, q)-periodic Birkhoff orbits. Using Thurston’s classification of surface diffeomorphisms [12, 13, 24], it was originally proven by Boyland that each (p, q)-periodic orbit is Birkhoff provided the system has zero topological entropy [6]. Taking into account the fact that Birkhoff solutions of (1.1) with \(k=l=1\) correspond to the Birkhoff orbits of the monotone twist map, Angenent reproduced [2] the conclusion by constructing a subsolution and a supersolution of (1.1) exchanging rotation numbers (See Definition 2.3). We remark that his approach strongly depended on the assumption that \(k=l=1\), therefore it is nontrivial and interesting to extend the preceding conclusion to higher-dimensions (See (i) of Main Theorem).
Another issue that we are concerned with will involve Farey intervals of rational numbers. We recall the definition as below.
Suppose \(p,q\in {\mathbb {N}}\) are relatively prime. \(I(p/q)=[r/s,r'/s']\) is called the Farey interval of p/q if r/s denotes the maximum of \(\{n/m\,|\,n/m<p/q, m<q, \text{ and } \ (m,n)=1\}\) and \(r'/s'\) denotes the minimum of \(\{n/m\,|\, n/m>p/q, m<q, \text{ and } \ (m,n)=1\}\). In fact, the endpoints of the Farey interval are the last two convergents of the continued fraction of p/q if the last partial quotient is made equal to one [17].
Let f be the monotone twist map of the annulus and p/q be the rational number mentioned above, Boyland and Hall showed [8] that the existence of a (p, q)-periodic non-Birkhoff orbit implies the non-existence of certain invariant circles for f, and they also proved that the Farey interval I(p/q) is contained in the rotation band [7, 9] of the periodic orbit, which measures the fastest and slowest rates of rotation associated with the periodic orbit. Furthermore, Boyland demonstrated in [9] that the rotation band of a chain transitive set [14] must lies in the rotation set \(\rho (f)\). There is no doubt that periodic orbits are special chain transitive sets, so the Farey interval \(I(p/q)\subseteq \rho (f)\). It’s worth pointing out that the Thurston-Nielsen theory played an important role in the process. Similar results for orientation and boundary preserving homeomorphisms can be found in [10].
Accordingly, a natural question arises: What is the version of the high-dimensional case? We shall answer this question in (ii) of Main Theorem.
We briefly describe our exploration to derive the main theorem. For the two-dimensional case, we emphasize that the usual tool is the Thurston-Nielson theory of surface automorphisms, and relevant proofs benefit from plane topology more or less. In view of this, we turn to look for alternative methods for high-dimensional cases. Inspired by the idea of Angenent [2], we intend to construct a subsolution and a supersolution of (1.1) which exchange rotation numbers. Unfortunately, it’s not hard to see that Angenent’s discussion relies on a concept of intersections (See Definition 2.1), and this concept could only be applied in the situation that \(k=l=1\).
In order to deal with general cases, we need to introduce a ‘new intersection’ in Section 3 to develop the concept of intersections. Taking advantage of the ‘new intersection’, we could construct by the monotonicity hypothesis (H1) a subsolution and a supersolution of (1.1) exchanging rotation numbers, and a periodic solution of (1.1) with a certain period. We stress that these constructions forms the basis for the proof of our main conclusion.
For our main result, we shall use generalized Birkhoff solutions defined in Sect. 3, which are generalizations of Birkhoff solutions.
MainTheorem
Assume that \(p,q\in {\mathbb {N}}\) are relatively prime. If (1.1) has a (p, q)-periodic solution \({\textbf{x}}\) which is not a generalized Birkhoff solution, then the following conclusions hold:
-
(i)
\(\varphi _\Delta \) has positive topological entropy.
-
(ii)
The Farey interval \(I(p/q)\subseteq \rho (\Delta )\).
In addition, we conclude from the remark following Definition 3.1 that (p, q)-periodic generalized Birkhoff solutions are exactly Birkhoff solutions for \(k=l=1\). Since (1.1) with \(k=l=1\) will induce a monotone twist map and (p, q)-periodic Birkhoff solutions of (1.1) correspond to (p, q)-periodic Birkhoff orbits of the map, our main theorem can be regarded as an extension of the results in [2, 6, 7, 10].
2 Preliminaries
In this section, we set up basic notation and terminology, and then present some necessary propositions used in later sections.
We consider the configuration space \({\mathbb {R}}^{{\mathbb {Z}}}\) equipped with the product topology and define a family of translations \(\{\tau _{m,n}\,|\, (m,n)\in {\mathbb {Z}}^{2}\}\) on \({\mathbb {R}}^{\mathbb {Z}}\) by
Next, we state two kinds of configurations both with bounded action and rotation numbers.
A configuration \({{\textbf{x}}}=(x_i)\) is called (p, q)-periodic if \(\tau _{p,q}{{\textbf{x}}}={{\textbf{x}}}\), i.e., \(x_{i-q}+p=x_i\) for all i. It’s easy to check that (p, q)-periodic configurations are configurations with bounded action and rotation number p/q. We note that (p, q)-periodic solutions of (1.1) correspond to the (p, q)-periodic orbits of \(F_{\Delta }\) generated by (1.1).
Another kind of well-known configurations are called Birkhoff configurations. We begin with the definition of intersections [1, 2, 5].
Definition 2.1
We say \({{\textbf{x}}}=(x_i)\) and \({{\textbf{y}}}=(y_i)\) intersect at the integer j if either
or
Let \({{\textbf{x}}}\in {\mathbb {R}}^{\mathbb {Z}}\). \({{\textbf{x}}}\) is said to be Birkhoff if \({{\textbf{x}}}\) and its any translation \(\tau _{m,n}{\textbf{x}}\) do not intersect. The following lemma reflects the principle features of Birkhoff configurations [15, 20, 21].
Lemma 2.2
Let \({{\textbf{x}}}=(x_i)\) be a Birkhoff configuration. Then it has a rotation number \(\rho \) with
Moreover, the map \({{\textbf{x}}}\mapsto \rho (\mathbf {{{\textbf{x}}}})\) is continuous in the product topology.
It follows immediately from Lemma 2.2 that Birkhoff configurations have bounded action and rotation numbers. It is noted that Birkhoff solutions of (1.1) correspond to Birkhoff orbits of the induced high-dimensional cylinder map [2].
Definition 2.3
If two configurations \({\underline{{{\textbf{x}}}}}=({\underline{x}}_i)\) and \({\overline{{{\textbf{x}}}}}=({{\overline{x}}}_i)\) satisfying
then they are called a subsolution and a supersolution of (1.1), respectively. For \(\omega _1<\omega _2\), it is said that they exchange rotation numbers \(\omega _1\) and \(\omega _2\) if
Finally, we give some relevant propositions, their proofs can be found in [2] and is omitted here.
Proposition 2.4
(Theorem 4.2 and Addendum 4.4 in [2]) Let \({\underline{{{\textbf{x}}}}}=({\underline{x}}_i),\ {\overline{{{\textbf{x}}}}}=({{\overline{x}}}_i)\) be a subsolution and a supersolution of (1.1), respectively, satisfying \({\underline{x}}_i\le {{\overline{x}}}_i\) for all \(i\in {\mathbb {Z}}\). If \({\underline{{{\textbf{x}}}}}\) or \({\overline{{{\textbf{x}}}}}\) is (p, q)-periodic, then there exists a (p, q)-periodic solution \({{\textbf{x}}}=(x_i)\) satisfying \({\underline{x}}_i\le x_i\le {{\overline{x}}}_{i}\) for all \(i\in {\mathbb {Z}}\).
Proposition 2.5
(Theorem 6.1 and Theorem 7.1 in [2]) Let \(\omega _1<\omega _2\). If (1.1) have a subsolution \({\underline{{{\textbf{x}}}}}=({\underline{x}}_i)\) and a supersolution \({\overline{{{\textbf{x}}}}}=({{\overline{x}}}_i)\) exchanging rotation numbers \(\omega _1\) and \(\omega _2\), then \(\varphi _\Delta \) has positive topological entropy and for each \(\rho \in (\omega _1,\omega _2)\), there is a Birkhoff solution with rotation number \(\rho \).
It should be pointed out that Proposition 2.5 has provided great convenience for judging whether the system has positive topological entropy, which has been applied in [2,3,4, 16, 19, 22, 23, 25] under different background and conditions.
3 Intersections of Type (k, l)
In this section, we will define a new type of intersections for solutions of (1.1), which lead to the definition of generalized Birkhoff solutions. Later, we shall show our main lemmas by utilizing this type of intersections.
Definition 3.1
We say \({{\textbf{x}}}=(x_i)\) and \({{\textbf{y}}}=(y_i)\) have an intersection of type (k, l) if they intersect at \(j,j'\in {\mathbb {Z}}\) with
and

Intersection of type (k, l)
Remark
Let \(k=l=1\) in (1.1) and \({{\textbf{x}}},{{\textbf{y}}}\) be two solutions of (1.1) with the same periodicity. It’s obvious that they intersect if and only if they have an intersection of type (k, l), which means these two definitions are equivalent in this case.
Furthermore, we shall define generalized Birkhoff solutions for monotone recurrence relation (1.1).
Definition 3.2
A solution \({{\textbf{x}}}\) of (1.1) is called a generalized Birkhoff solution if \({{\textbf{x}}}\) and its any translation \(\tau _{m,n}{\textbf{x}}\) do not have an intersection of type (k, l).
It is easily seen that each Birkhoff solution is a generalized Birkhoff solution. We now proceed to divide this section into two subsections, each subsection consists of an essential lemma.
3.1 Constructions of Subsolutions and Supersolutions
Lemma 3.3
Assume \({{\textbf{x}}}\) is a (p, q)-periodic solution of (1.1) and \(a/b<c/d\) with \(b,d>0\). If \(\tau _{b,a}{{\textbf{x}}}\), \(\tau _{d,c}{{\textbf{x}}}\) have an intersection of type (k, l) with \({{\textbf{x}}}\), respectively, then there exist a subsolution and a supersolution exchanging rotation numbers a/b and c/d.
Proof
We may assume without loss of generality that \(b,d>k+l\) for simplicity of presentation and proofs for \(b,d\le k+l\) can be obtained by similar arguments. Our first goal is to construct a subsolution \(\underline{{{\textbf{x}}}}=(\underline{x}_{i})\) with forward rotation number a/b and backward rotation number c/d.
Since \(\tau _{d,c}{{\textbf{x}}}\) have an intersection of type (k, l) with \({{\textbf{x}}}\), there exists \(j\in {\mathbb {Z}}\) such that \(\tau _{d,c}{{\textbf{x}}}\) intersects with \({{\textbf{x}}}\) at j satisfying
and
Let \(\underline{x}_{i}=x_{i}\) for \(j-d\le i\le j-1\), and for \(s\ge 1\), \(1\le t\le d\), define
Claim. \(\delta _{i}:=\Delta (\underline{x}_{i-k},\cdots ,{\underline{x}_{i}},\cdots ,\underline{x}_{i+l})\ge 0\) for all \(i<j-l\).
Indeed, it suffices to consider \(i=j-l-d,\cdots ,i=j-l-1\) by periodicity, and we shall prove it as follows due to the monotonicity hypothesis (H1).
For \(i=j-l-d\) (See Fig. 2), we obtain by (3.2) with \(n=0\) that
For \(i=j-d-1\), we derive by (3.2) with \(n=0,\cdots ,l-1\) that
For \(i=j-d\), we derive by (3.2) with \(n=-k,\cdots ,-1\) that
For \(i=j-d+k-1\), we have by (3.1) with \(n=-1\) that
For \(i=j-d+k\), we have
For \(i=j-l-1\), we have
Consequently, the claim is true.
Since \(\tau _{b,a}{{\textbf{x}}}\) have an intersection of type (k, l) with \({{\textbf{x}}}\) and \({{\textbf{x}}}\) is (p, q)-periodic, there exists \(m\gg j\) such that \(\tau _{b,a}{{\textbf{x}}}\) intersects with \({{\textbf{x}}}\) at \(m+b\) satisfying
and
Let \(\underline{x}_{i}=x_{i}\) for \(j\le i\le m+b-1\). Moreover, we define
Note that
To obtain \(\underline{{{\textbf{x}}}}\) is a subsolution, we only have to show
Taking the periodicity into consideration, it is sufficient to verify by (H1) the above inequalities hold for \(i=m+k,\cdots ,m+k+b-1\).
For \(i=m+k\), we have
For \(i=m+b-l-1\), we have
For \(i=m+b-l\), we derive by (3.4) with \(n=0\) that
For \(i=m+b-1\), we deduce from (3.4) with \(n=0,\cdots ,l-1\) that
For \(i=m+b\) (See Fig. 2), we deduce from (3.3) with \(n=-k,\cdots ,-1\) that
For \(i=m+b+k-1\), we have by (3.3) with \(n=-1\) that
In conclusion, we have constructed a subsolution \(\underline{{{\textbf{x}}}}=(\underline{x}_i)\) with forward rotation number a/b and backward rotation number c/d. Analogously, we can also construct a supersolution \(\overline{{{\textbf{x}}}}=(\overline{x}_i)\) with forward rotation number c/d and backward rotation number a/b. This completes the proof of Lemma 3.3. \(\square \)

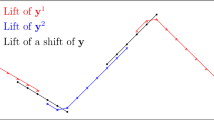
\(\underline{{{\textbf{x}}}}\) at \(i=j-l-d\) and \(i=m+b\)
3.2 Constructions of (r, s)-Periodic Solutions
Lemma 3.4
Let \(r\in {\mathbb {Z}}\), \(s\in {\mathbb {N}}\) and \({{\textbf{x}}}\) be a solution of (1.1). If \(\tau _{s,r}{{\textbf{x}}}\) and \({{\textbf{x}}}\) have an intersection of type (k, l), then there exists a (r, s)-periodic solution of (1.1).
Proof
For convenience, we may assume \(s>k+l\) as in Lemma 3.3. Since \(\tau _{s,r}{{\textbf{x}}}\) and \({{\textbf{x}}}\) have an intersection of type (k, l), there exist \(j,j'\in {\mathbb {Z}}\) satisfying:
and
Our task is now to construct by (3.5) and (3.6) a (r, s)-periodic subsolution \(\underline{{{\textbf{x}}}}=(\underline{x}_i)\). We define
Then \(\underline{{{\textbf{x}}}}\) is (r, s)-periodic, and it remains to prove by (H1) that
Indeed, for \(i=j-s\) (See Figure 3), we conclude from (3.5) with \(n=-k,\cdots ,-1\) that
For \(i=j-s+k-1\), we conclude from (3.5) with \(n=-1\) that
For \(i=j-s+k\), we get
For \(i=j-l-1\), we get
For \(i=j-l\), we get from (3.6) with \(n=0\) that
For \(i=j-1\), we have by (3.6) with \(n=0,\cdots ,l-1\) that
Therefore, we have constructed a (r, s)-periodic subsolution \({\underline{{{\textbf{x}}}}}\) of (1.1). Using the similar argument as above, we can obtain by (3.7) and (3.8) a (r, s)-periodic supersolution \(\overline{{{\textbf{x}}}}\) of (1.1). Because both \({\underline{{{\textbf{x}}}}}\) and \(\overline{{{\textbf{x}}}}\) are (r, s)-periodic, we can assume, by making an integer translation if necessary, that \({\underline{x}}_i\le \overline{x}_i\) for all i. It follows from Proposition 2.4 that there is a (r, s)-periodic solution of (1.1). \(\square \)

\(\underline{{{\textbf{x}}}}\) at \(i=j-s\)
4 Proof of Main Theorem
By means of preceding lemmas, we are now in a position to present the proof of Main Theorem.
Proof of Main Theorem:
Since \({{\textbf{x}}}\) is a (p, q)-periodic solution which is not a generalized Birkhoff solution, there exist \(0<m<q\) and \(n\in {\mathbb {Z}}\) such that \(\tau _{m,n}{{\textbf{x}}}\) and \({{\textbf{x}}}\) have an intersection of type (k, l).
Let \(m'=q-m, n'=p-n\). Since p, q are relatively prime, we obtain \(n/m\ne n'/m'\). Otherwise, a simple calculation gives that \(p/q=n/m\). Then there exists \(N\ge 1\) such that \((n,m)=N(p,q)\), which contradicts to \(0<m<q\).
Now we denote
while
By definition, p/q is between n/m and \(n'/m'\). As a result, \(p/q\in (a/b,c/d)\) and \(I(p/q)\subseteq [a/b,c/d]\).
Note that \(\tau _{m,n}{{\textbf{x}}}\) and \({{\textbf{x}}}\) have an intersection of type (k, l). It follows that \({{\textbf{x}}}\) and \(\tau _{-m,-n}{{\textbf{x}}}\) have an intersection of type (k, l) as well. We derive by periodicity that
hence \(\tau _{m',n'}{{\textbf{x}}}\) and \({{\textbf{x}}}\) have an intersection of type (k, l).
Due to (4.1) and (4.2), \(\tau _{b,a}{{\textbf{x}}}\) and \(\tau _{d,c}{{\textbf{x}}}\) have an intersection of type (k, l) with \({{\textbf{x}}}\), respectively. It follows from Lemma 3.3 that there exist a subsolution and a supersolution exchanging rotation numbers a/b and c/d, which yields \(\varphi _\Delta \) has positive topological entropy (We finish the proof of (i)) and each \(\rho \in (a/b,c/d)\) can be realized by a Birkhoff solution according to Proposition 2.5. As a consequence, \((a/b,c/d)\subseteq \rho (\Delta )\).
In order to verify \(I(p/q)\subseteq \rho (\Delta )\), what is left is to show \(a/b,c/d\in \rho (\Delta )\), and it is a straightforward result from Lemma 3.4 (The proof of (ii) is complete). \(\square \)
Data Availability
Not applicable.
References
Angenent, S.: The periodic orbits of an area preserving twist map. Commun. Math. Phys. 115, 353–374 (1988)
Angenent, S.: Monotone recurrence relations, their Birkhoff orbits and topological entropy. Ergodic Theory Dyn. Syst. 10, 15–41 (1990)
Angenent, S.: A remark on the topological entropy and invariant circles of an area preserving twist map, in Twist Mappings and Their Applications, IMA Volumes in Mathematics, Vol. 44, pp. 1-5, R. McGehee and K. R. Meyer Eds., Springer, (1992)
Baesens, C., MacKay, R.S., Qin, W.-X., Zhou, T.: Depinning transition of travelling waves for particle chains. Nonlinearity 36, 878–901 (2023)
Bangert, V.: Mather sets for twist maps and geodesics on tori, in Dynamics Reported, Vol. 1 (1988), pp. 1-56, U. Kirchgraber and H. O. Walther eds., New York: Wiley
Boyland, P.L.: Braid types and a topological method of proving positive entropy, Boston University, (1984)
Boyland, P.L.: Invariant circles and rotation bands in monotone twist maps. Commun. Math. Phys. 113, 67–77 (1987)
Boyland, P.L., Hall, G.R.: Invariant circles and the order structure of periodic orbits in monotone twist maps. Topology 26, 21–35 (1987)
Boyland, P.L.: Rotation sets and Morse decompositions in twist maps. Ergodic Theory Dyn. Syst. 8, 33–61 (1988)
Boyland, P.L.: Rotation sets and monotone periodic orbits for annulus homeomorphisms. Comment. Math. Helvetici 67, 203–213 (1992)
Boyland, P.L.: The rotation set as a dynamical invariant, in Twist Mappings and Their Applications, IMA Volumes in Mathematics, Vol. 44, pp. 73-86, R. McGehee and K. R. Meyer Eds., Springer (1992)
Casson, A., Bleiler, S.: Automorphisms of surfaces after Nielsen and Thurston. Cambridge University Press, Cambridge (1988)
Fathi, A., Laudenbach, F., Poenaru, V.: Travaux de Thurston sur les surfaces, Asterisque, Vol. 66-67 (1979)
Franks, J.: Recurrence and fixed points of surface homeomorphisms. Ergodic Theory Dynam. Syst. 8, 99–107 (1988)
Golé, C.: Symplectic twist maps: Global variational techniques. World Scientific, Singapore (2001)
Guo, L., Miao, X.-Q., Wang, Y.-N., Qin, W.-X.: Positive topological entropy for monotone recurrence relations. Ergodic Theory Dynam. Syst. 35, 1880–1901 (2015)
Hardy, G.H., Wright, E.M.: An introduction to the theory of numbers. Oxford University Press, Oxford (1979)
Hall, G.R.: A topological version of a theorem of Mather on twist maps. Ergodic Theory Dyn. Syst. 4, 585–603 (1984)
Marò, S.: Chaotic dynamics in an impact problem. Ann. Henri Poincaré 16, 1633–1650 (2015)
Mramor, B., Rink, B.: Ghost circles in lattice Aubry-Mather theory. J. Differ. Equs. 252, 3163–3208 (2012)
Mramor, B., Rink, B.: On the destruction of minimal foliations. Proc. Lond. Math. Soc. 108, 704–737 (2014)
Qin, W.-X., Shen, B.-N., Sun, Y.-L., Zhou, T.: Zero entropy and stable rotation sets for monotone recurrence relations. Ergodic Theory Dyn. Syst. 43, 1737–1759 (2023)
Shen, B.-N., Zhou, T., Qin, W.-X.: Stable rotation numbers and Birkhoff ordered circles for monotone recurrence relations, submitted
Thurston, W.: On the geometry and dynamics of diffeomorphisms of surfaces. Bull. Am. Math. Soc. 19, 417–431 (1988)
Zhou, T., Qin, W.-X.: Pseudo solutions, rotation sets, and shadowing rotations for monotone recurrence relations. Math. Z. 297, 1673–1692 (2021)
Acknowledgements
The author would like to thank Wen-Xin Qin for the helpful discussions and is grateful to the anonymous referee for his/her valuable suggestions.
Funding
National Natural Science Foundation of China, 12201446. Natural Science Foundation of the Jiangsu Higher Education Institutions of China, 22KJB110005. Shuangchuang Program of Jiangsu Province, JSSCBS20220898
Author information
Authors and Affiliations
Contributions
Tong Zhou wrote and reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
Not applicable.
Ethical Approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supported by the National Natural Science Foundation of China(12201446), the Natural Science Foundation of the Jiangsu Higher Education Institutions of China(22KJB110005), and the Shuangchuang Program of Jiangsu Province (JSSCBS20220898).
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhou, T. Periodic Generalized Birkhoff Solutions and Farey Intervals for Monotone Recurrence Relations. J Dyn Diff Equat (2024). https://doi.org/10.1007/s10884-024-10364-9
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10884-024-10364-9
Keywords
- Rotation set
- Generalized Birkhoff solution
- Topological entropy
- Farey interval
- Monotone recurrence relation