
Abstract
The dynamics of a general reaction–diffusion–advection two species model with nonlocal delay effect and Dirichlet boundary condition is investigated in this paper. The existence and stability of the positive spatially nonhomogeneous steady state solution are studied. Then by regarding the time delay \(\tau \) as the bifurcation parameter, we show that Hopf bifurcation occurs near the steady state solution at the critical values \(\tau _n(n=0,1,2,\ldots )\). Moreover, the Hopf bifurcation is forward and the bifurcated periodic solutions are stable on the center manifold. The general results are applied to a Lotka–Volterra competition–diffusion–advection model with nonlocal delay.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the past few decades, the dynamical models in the form of reaction-diffusion equations have been frequently used to solve problems related to spatial ecology and evolution, see [5, 22, 23, 25, 27]. In the real world, due to reproductive maturity or other time lags in biological processes, historical information may have a significant impact on the dynamics of population systems, so many delayed reaction-diffusion equations are used to describe the evolution of population distribution [1, 4, 6, 15, 30].
The dispersal by random diffusion is one of the most basic dispersal strategies. In reality, the movements of species may be a combination of both random and biased ones. Since species are intelligent, many organisms can sense their environment and pay attention to moving in a direction that is favorable to them. Based on this observation, Belgacem and Cosner [2] assumed that the population can exhibit a taxis in the direction of increasing environmental favorability, and studied the reaction–diffusion–advection logistic model
where u(x, t) denotes the species density at location x and time t. In model (1.1), the term \(-d\nabla u\) accounts for random diffusion, \(a u\nabla m(x)\) represents the migration of species along the gradient direction of resource function m(x). The results of Belgacem and Cosner [2] and the subsequent literature [9] show that for single species, migration along the gradient direction of the food distribution of the species will generally contribute to the survival of the species.
We would like to know what spatiotemporal patterns can be indeced by the joint effect of time delays, spatial diffusion, advection, heterogeneous environment and population interaction. In a reaction–diffusion–advection model with time delay effect, the effects of dispersal and time delays are not independent of each other, and an individual that was previously at location x may now not be at the same point in space [3, 6, 12]. Therefore, it is more reasonable to consider the model with nonlocal time delay. Recently, Jin and Yuan [19] investigated the following general delayed reaction–diffusion–advection equation
where \(f(x,0,0)=m(x)\) and the term \(\int _{\varOmega }k(x,y)u(y,t-\tau )\mathrm {d}y\) is called the nonlocal delayed term, which represents the spatial weighted time delays according to distance from the original position. In [19], Jin and Yuan showed the existence of spatially nonhomogeneous steady-state solutions of (1.2) and investigated whether time delay \(\tau \) can induce Hopf bifurcation near the steady-state solution. They also showed the influence of the advection rate a on Hopf bifurcation.
The dynamics of the two-species model has been extensively studied, including the global stability of (non-)constant steady states [7, 10, 17, 20, 24, 26] or Hopf bifurcations induced by time delays at the (non-)constant steady states [13, 18, 29, 31, 33]. For instance, in [14, 15], the authors considered the diffusive two-species model with nonlocal delay effect and investigated the stability of spatially nonhomogeneous positive steady state and the corresponding Hopf bifurcation problem. Recently, Li and Dai [21] have studied the following Lotka–Volterra competition–diffusion–advection model with time delay effect:
They obtained the existence of spatially nonhomogeneous positive steady state and showed that this positive steady state loses its stability for a large delay \(\tau \) and a Hopf bifurcation occurs such that system (1.3) exhibits oscillatory pattern.
Motivated by [6, 14, 19], we can assume that in a two-species model, the per-capita growth rates of two species do not depend on its density at the current positions and time but on all positions in region \(\varOmega \) and previous time \(\tau \). Hence, the localized density-dependent per capita growth rates \(m(x)-a_{11}u(x,t-\tau )-a_{12}v(x,t-\tau )\) and \(m(x)-a_{21}u(x,t-\tau )-a_{22}v(x,t-\tau )\) in (1.3) are not realistic. Instead, it is more reasonable to consider the following general reaction–diffusion–advection two species model with nonlocal delay effect as follows:
Here u(x, t) and v(x, t) denote the species densities at time t and location x, respectively; the two species have the same diffusion rate \(d>0\) and the same advection rate \(a>0\); \(\varOmega \) is a bounded domain in \({\mathbb {R}}^n(1\le n\le 3)\) with smooth boundary \(\partial \varOmega \); \(\tau \) is the time delay representing the maturation time; \(k_{ij}(i,j=1,2)\) are continuous kernel functions on \(\varOmega \times \varOmega \) which describe the dispersal behavior of the populations and
the nonlinear smooth functions \(f_i(x,s_1,s_2)(i=1,2):\varOmega \times {\mathbb {R}}\times {\mathbb {R}}\rightarrow {\mathbb {R}}\) are called the general per capita growth rates and satisfy the condition
-
\(\mathbf{(H_1)}\) \(f_1(x,0,0)=f_2(x,0,0)=m(x)\), where \(m(x)\in C^2({\overline{\varOmega }})\) and \(\max _{{\overline{\varOmega }}}m(x)> 0\).
The Dirichlet boundary conditions imply that the exterior environment is hostile and the two species cannot move across the boundary of environment. We consider model (1.4) with the following initial condition:
where the initial data \(\varphi _1,\varphi _2\in {\mathscr {C}}\triangleq C([-\tau ,0],{\mathbb {Y}})\) with \({\mathbb {Y}}=L^2(\varOmega )\).
For the convenience of analysis, we first make a variable transformation. Letting \({\tilde{u}}=e^{(-a/d)m(x)}u, {\tilde{v}}=e^{(-a/d)m(x)}v, t={\tilde{t}}/d\), denoting \(\lambda =1/d,\alpha =a/d,\tau ={\tilde{\tau }}/d\), and dropping the tilde sign, model (1.4) can be transformed as follows:
where
with \(K_{ij}(x,y)=k_{ij}(x,y)e^{\alpha m(y)}\) for \(i,j=1,2\).
For the simplification of calculation, denote
and
for \(i,j=1,2\). Suppose further the following two assumptions hold:
-
\(\mathbf{(H_2)}\) \((\kappa _{21}-\kappa _{11})(\kappa _{11}\kappa _{22}-\kappa _{12}\kappa _{21})>0\) and \((\kappa _{12}-\kappa _{22})(\kappa _{11}\kappa _{22}-\kappa _{12}\kappa _{21})>0\);
-
\(\mathbf{(H_3)}\) \(\kappa _{11}\kappa _{22}\ge 0\) and \(\kappa _{12}\kappa _{21}\ge 0\).
It follows from [2, 5, 23] that, under the assumption \(\mathbf{(H_1)}\), the following eigenvalue problem
has a positive principal eigenvalue \(\lambda _*\) and the corresponding eigenfunction \(\phi \in C^{1+\delta }({\overline{\varOmega }})\) can be chosen strictly positive in \(\varOmega \), where \(\delta \in (0,1)\). In this paper our main results are in the spirit of [21] for the local growth rate case: under the assumptions \(\mathbf{(H_1)}-\mathbf{(H_3)}\), there exists a \(\lambda ^*\) with \(0<\lambda ^*-\lambda _*\ll 1\), such that for any \(\lambda \in (\lambda _*,\lambda ^*]\), system (1.5) admits a spatially nonhomogeneous positive steady state \((u_{\lambda },v_{\lambda })\) and there exists a sequence of values \(\{ \tau _n(\lambda ) \}_{n=0}^{\infty }\) such that \((u_{\lambda },v_{\lambda })\) is locally asymptotically stable when \(\tau \in [0,\tau _0(\lambda ))\), unstable when \(\tau \in (\tau _0(\lambda ),\infty )\), and for system (1.5), a forward Hopf bifurcation occurs at \(\tau _n(\lambda )\) from the positive steady state \((u_{\lambda },v_{\lambda })\). Moreover, Hopf bifurcation is more likely to occur when adding a term describing advection along the environmental gradients for the diffusive Lotka–Volterra competition model with nonlocal delay. Here, the assumption \(\mathbf{(H_2)}\) is used to guarantee the existence of positive steady-state solutions. \(\mathbf{(H_3)}\) is imposed to make sure the simplicity of pure imaginary eigenvalue and is actually satisfied by many population biological models.
The rest part of this paper is organized as follows. In Sect. 2, we establish the existence of the positive steady state of model (1.5). Sections 3 and 4 are devoted to the stability and Hopf bifurcation of the positive steady state through analyzing the corresponding eigenvalue problem. Then the normal form of Hopf bifurcation is derived in Sect. 5 to determine the bifurcation direction and stability of the bifurcating periodic solutions. In Sect. 6, the general results are applied to a competition–diffusion–advection model with nonlocal delay effect.
Notice that the elliptic operator in (1.6) is not self-adjoint because of advection term, which causes some technical difficulties. In view of these difficulties we introduce some weighted spaces. The weighted space plays a vital role in the Hopf bifurcation analysis of system (1.5). Throughout the paper, we use the following notations. Denote by \(L^2_w(\varOmega )\) the weighted \(L^2\) space with a weighted norm
Let \(H^k_w(\varOmega )(k\ge 0)\) be the weighted Sobolev space of the \(L^2_w\)-function u(x) defined on \(\varOmega \), and the norm of space \(H^k_w(\varOmega )(k\ge 0)\) is defined by
Define the space \({\mathbb {X}}=H^2_w(\varOmega )\cap H_{0,w}^1(\varOmega )\) and \({\mathbb {Y}}=L^2_w(\varOmega )\), where
For a space Z, we also define the complexification of Z to be \(Z_{{\mathbb {C}}}:=Z\oplus \mathrm i Z=\{ x_1+\mathrm i x_2|x_1,x_2\in Z \}\). Let \({\mathcal {C}}=C([-\tau ,0],{\mathbb {Y}})\) be the Banach space of continuous mapping from \([-\tau ,0]\) into \({\mathbb {Y}}\), and \(\langle \cdot ,\cdot \rangle _w\) be the \(L^2_w\) inner product on complex-valued Hilbert space \({\mathbb {Y}}_{{\mathbb {C}}}\) or \({\mathbb {Y}}_{{\mathbb {C}}}^2\), defined as
2 Existence of Positive Steady State
This section is devoted to the the existence of the positive steady state of model (1.5), which satisfies the following boundary value equation:
To solve problem (2.1), define \(F:{\mathbb {X}}^2\times R^+\rightarrow {\mathbb {Y}}^2\) as
for all \(U=(u,v)^T\). At first, for any fixed \(\lambda \in {\mathbb {R}}^+\), \(F(U,\lambda )\) always has a trivial steady state (0, 0). Denote
which is the Frechét derivative of F with respect to U at \((0,\lambda _*)\). It is easy to check that \({\mathcal {L}}\) is a self-adjoint operator in the sense of weighted inner product, and \({\mathscr {N}}({\mathcal {L}})=\mathrm {span}\{ q_1,q_2 \}\), where \(q_1=(\phi ,0)^T\) and \(q_2=(0,\phi )^T\). Then operator \({\mathcal {L}}:{\mathbb {X}}^2\rightarrow {\mathbb {Y}}^2\) is Fredholm with index zero. Clearly, the Crandall-Rabinowitz bifurcation theorem cannot be applied here to show the existence of positive solution of (2.1) since \(\mathrm {dim}{\mathscr {N}}({\mathcal {L}})=2\). Now, we deal with this situation by implicit function theorem. For later discussion, we decompose the spaces \({\mathbb {X}}^2,{\mathbb {Y}}^2\):
where
Then we have the following result on the existence of positive steady states for system (1.5).
Theorem 1
Suppose that \(\mathbf{(H_1)}-\mathbf{(H_3)}\) hold. Then there exist \(\lambda ^*>\lambda _*\) and a continuously differential mapping \(\lambda \mapsto (\xi _{\lambda },\eta _{\lambda },\beta _{\lambda },c_{\lambda })\) from \([\lambda _*,\lambda ^*]\) to \(X_1^2\times {\mathbb {R}}^+ \times {\mathbb {R}}^+\) such that, for \(\lambda \in (\lambda _*,\lambda ^*]\), system (1.5) has a positive steady state \((u_\lambda (x),v_\lambda (x))\), where
Moreover, for \(\lambda =\lambda _*\),
and \((\xi _{\lambda _*},\eta _{\lambda _*})^T\in X_1^2\) is the unique solution of the following equation
Proof
One can easily have
and then \(\beta _{\lambda _*}\) and \(c_{\lambda _*}\) are well defined and positive. From (2.4), we see that
and hence \(\xi _{\lambda _*}\) and \(\eta _{\lambda _*}\) are also well defined. Now, setting \(u=\beta (\lambda -\lambda _*)[\phi +(\lambda -\lambda _*)\xi ]\) and \(v=c(\lambda -\lambda _*)[\phi +(\lambda -\lambda _*)\eta ]\) into \(F(U,\lambda )=0\), we obtain that \((\beta ,c,\xi ,\eta )\) satisfies
where
with
That is, the existence problem of positive solution of (2.1) is reduced to solving \({\mathcal {F}}(\xi ,\eta ,\beta ,c,\lambda )=0\). Seeing that \(\varOmega \) is a bounded domain in \({\mathbb {R}}^n(1\le n\le 3)\) with smooth boundary, we can deduce that \(X_1^2\) is compactly imbedded into \(C^{\delta }({\overline{\varOmega }}) \times C^{\delta }({\overline{\varOmega }})\) for some \(\delta \in (0,1)\). Then \({\mathcal {F}}(\xi ,\eta ,\beta ,c,\lambda )\) is a function from \(X_1^2\times {\mathbb {R}}^3\) to \({\mathbb {Y}}^2\). From the definition of \(\xi _{\lambda _*},\eta _{\lambda _*},\beta _{\lambda _*},c_{\lambda _*}\), it holds that \({\mathcal {F}}(\xi _{\lambda _*},\eta _{\lambda _*},\beta _{\lambda _*},c_{\lambda _*},\lambda _*)=0\). Let \(D_{(\xi ,\eta ,\beta ,c)}{\mathcal {F}}(\xi _{\lambda _*},\eta _{\lambda _*},\beta _{\lambda _*},c_{\lambda _*},\lambda _*)[\chi ,\kappa ,\rho ,\varsigma ]\) be the Fréchet derivative of \({\mathcal {F}}\) with respect to \((\xi ,\eta ,\beta ,c)\) evaluated at \((\xi _{\lambda _*},\eta _{\lambda _*},\beta _{\lambda _*},c_{\lambda _*},\lambda _*)\). Then a calculation gives that
For applying the implitic function theorem, we will verify that \(D_{(\xi ,\eta ,\beta ,c)}{\mathcal {F}}(\xi _{\lambda _*},\eta _{\lambda _*},\beta _{\lambda _*},c_{\lambda _*},\lambda _*)\) is a bijection from \(X_1^2\times {\mathbb {R}}^2\) to \({\mathbb {Y}}^2\). Since \(\kappa _{11}\kappa _{22}-\kappa _{12}\kappa _{21}\ne 0\) due to assumption \(\mathbf{(H_2)}\), one can deduce that
That is, \(D_{(\xi ,\eta ,\beta ,c)}{\mathcal {F}}(\xi _{\lambda _*},\eta _{\lambda _*},\beta _{\lambda _*},c_{\lambda _*},\lambda _*)\) is injective. Next, we show that it is a surjection. For any \(({\hat{u}},{\hat{v}})^{T}\in {\mathbb {Y}}^2\), we have the following decomposition
By choosing
there holds that
Notice that \((u_2,v_2)^T\in Y_1^2={\mathscr {R}}({\mathcal {L}})\) and \({\mathcal {L}}:X_1^2\rightarrow Y_1^2\) is a bijection, then there is \((\chi _0,\kappa _0)\in X_1^2\) such that
Consequently, \(D_{(\xi ,\eta ,\beta ,c)}{\mathcal {F}}(\xi _{\lambda _*},\eta _{\lambda _*},\beta _{\lambda _*},c_{\lambda _*},\lambda _*)\) is bijective from \(X_1^2\times {\mathbb {R}}^2\) to \({\mathbb {Y}}^2\). Then from implicit function theorem, there exist \(\lambda ^*>\lambda _*\) and a continuously differential mapping \(\lambda \mapsto (\xi _{\lambda },\eta _{\lambda },\beta _{\lambda },c_{\lambda })\) from \([\lambda _*,\lambda ^*]\) to \(X_1^2\times {\mathbb {R}}^+ \times {\mathbb {R}}^+\) such that
Therefore, \((u_{\lambda },v_{\lambda })\) is a positive solution of Eq. (2.1). The proof is completed. \(\square \)
3 Eigenvalue Problems
In this section, we will study the eigenvalue problem associated with the positive steady state \(U_{\lambda }=(u_{\lambda },v_{\lambda })^T\) defined in Theorem 1. Unless otherwise specified, we always assume that \(\lambda \in [\lambda _*,\lambda ^*]\) with \(0<\lambda ^*-\lambda _* \ll 1\), and \(\mathbf{(H_1)}-\mathbf{(H_3)}\) hold. Linearizing system (1.5) at \(U_{\lambda }\), we obtain
where
are the Fréchet derivative of \(f_i(i=1,2)\) about the second term and the third term respectively. Define two linear operators \(A_\lambda :{\mathbb {X}}_{{\mathbb {C}}}^2\rightarrow {\mathbb {Y}}_{{\mathbb {C}}}^2\) and \(B_\lambda :{\mathbb {Y}}_{{\mathbb {C}}}^2\rightarrow {\mathbb {Y}}_{{\mathbb {C}}}^2\) by
and
for \(\psi =(\psi _1,\psi _2)^T\in {\mathbb {Y}}_{{\mathbb {C}}}^2\). Then \(A_\lambda \) is an infinitesimal generator of a compact \(C_0\) semigroup [28]. From [32], the solution semigroup of Eq. (3.1) has an infinitesimal generator \(A_{\tau ,\lambda }\) defined by
with the domain
where \(C_{{\mathbb {C}}}^1=C^1([-\tau ,0],{\mathbb {X}}_{{\mathbb {C}}}^2)\). Now the stability of \((u_{\lambda },v_{\lambda })\) is determined by the point spectrum of \(A_{\tau ,\lambda }\), which is
with
As in [14], we also need to consider the adjoint operator \(A_{\tau ,\lambda }^*\) of \(A_{\tau ,\lambda }\) in the sense of weighted inner product, which is defined as
with the domain
where \(B_\lambda ^*:{\mathbb {Y}}^2 \rightarrow {\mathbb {Y}}^2\) is given by
for \(\psi =(\psi _1,\psi _2)^T\in {\mathbb {Y}}^2\) with \({\widetilde{K}}_{ij}(x,\cdot )=k_{ij}(x,\cdot )e^{\alpha m(x)}\) for \(i,j=1,2\). The spectral set of \(A_{\tau ,\lambda }^*\) is
with
One can easily check that
In the sense of weighted inner product, \({{\tilde{\varLambda }}}(\lambda ,{{\bar{\mu }}},\tau )\) is the adjoint operator of \(\varLambda (\lambda ,\mu ,\tau )\) and they has the same point spectrum, i.e.
which means \(\mu \in \sigma (A_{\tau ,\lambda })\) if and only if \({{\bar{\mu }}}\in \sigma (A_{\tau ,\lambda }^*)\).
Theorem 2
Under assumptions \(\mathbf{(H_1)}-\mathbf{(H_3)}\), for \(\lambda \in [\lambda _*,\lambda ^*]\) and \(\tau \ge 0\), 0 is not an eigenvalue of \(A_{\tau ,\lambda }\).
Proof
Suppose to the contrary that 0 is an eigenvalue of \(A_{\tau ,\lambda }\), then there exists \(\psi \in {\mathbb {X}}_{{\mathbb {C}}}^2\setminus \{(0,0)\}\) such that
By the decomposition \({\mathbb {X}}^2={\mathscr {N}}({\mathcal {L}}_{\lambda _*})\oplus X_1^2\), \(\psi \) takes the following form
where \({\tilde{a}}(\lambda )\in {\mathbb {R}}^2\) and \(b(\lambda ,\cdot )\in X_1^2\). Then substituting (3.8) to (3.7) gives
Since \((u_{\lambda },v_{\lambda })\rightarrow (0,0)\) as \(\lambda \rightarrow \lambda _*\), then \(r^{i\lambda }_j(x)\rightarrow r^i_j(x)\) uniformly in \(\varOmega \) as \(\lambda \rightarrow \lambda _*\). A straightforward calculation yields
where
in which \({\widetilde{k}}_{ij}\) is defined as in (2.7). By expanding \({\tilde{a}}(\lambda )\) and \(b(\lambda ,x)\) near \(\lambda _*\), we obtain
Note that \(\varLambda (\lambda _*,0,\tau )={\mathcal {L}}\), where \({\mathcal {L}}\) is defined as (2.2). Then from (3.9) and (3.10) we see that
Calculating the weighted inner product of above equation with \(\phi \), we have \(\varrho \widetilde{{\mathcal {K}}} {\tilde{a}}_0=0\). Due to the positivity of \(\beta _{\lambda _*},c_{\lambda _*}\) and the assumption \(\mathbf{(H_2)}\), we can deduce that \({\tilde{a}}_0=0\). Since \({\mathcal {L}}_{\lambda _*}|_{X_1^2}: X_1^2 \rightarrow Y_1^2\) is invertible, then \(b_0(x)=0\) for all x. Likewise, considering the term of \((\lambda -\lambda _*)^i(i\ge 1)\), we still have that \({\tilde{a}}_i=0\) and \(b_i(x)=0\) for all x. Consequently, \(\psi =0\) is the unique solution of \(\varLambda (\lambda ,0,\tau )\psi =0\), a contradiction with \(\psi \in {\mathbb {X}}_{{\mathbb {C}}}^2\setminus \{(0,0)\}\). The proof is completed. \(\square \)
In the following, we show the situation when \(A_{\tau ,\lambda }\) has a pair of purely imaginary eigenvalues \(\mu =\pm i\omega (\omega >0)\) for some \(\tau >0\). From previous argument, \(\mu =i\omega \in \sigma _p(A_{\tau ,\lambda })\) for some \(\tau >0\) if and only if
is solvable for some value of \(\omega >0, \theta \in [0,2\pi )\) and \(\psi \in {\mathbb {X}}_{{\mathbb {C}}}^2\setminus \{(0,0)\}\), where \(\theta :=\omega \tau \). We first show the following lemma for further discussion.
Lemma 1
Recall that \(\lambda _*\) is the principal eigenvalue of problem (1.6), the following results hold:
-
(i)
if \(z\in {\mathbb {X}}_{{\mathbb {C}}}\) and \(\langle \phi ,z \rangle _w=0\), then \(|\langle Lz,z \rangle _w|\ge \lambda _2\Vert z\Vert _{{\mathbb {Y}}_{{\mathbb {C}}}}^2\), where the operator \(L:{\mathbb {X}}\rightarrow {\mathbb {Y}}\) is defined by
$$\begin{aligned}L=e^{-\alpha m(x)}\nabla \cdot [e^{\alpha m(x)}\nabla ]+\lambda _*m(x)\end{aligned}$$and \(\lambda _2\) is the second eigenvalue of operator \(-L\);
-
(ii)
if \((\omega ,\theta ,\psi )\) is a solution of Eq. (3.11) with \(\omega >0,\theta \in [0,2\pi )\) and \(\psi \in {\mathbb {X}}_{{\mathbb {C}}}^2\setminus \{(0,0)\}\), then \(\dfrac{\omega }{\lambda -\lambda _*}\) is bounded for \(\lambda \in (\lambda _*,\lambda ^*]\).
Proof
Part (i) can be proved as in [8, Lemma 2.3]. We only discuss part (ii). By calculating the weighted inner product of Eq. (3.11) with \(\psi \), one can obtain
Choose some \(\theta _0\in [0,2\pi )\) such that
Note that \(A_{\lambda }\) is self-adjoint in the sense of weighted inner product, then \(\big \langle \psi ,A_{\lambda } \psi \big \rangle _w\) is real. Separating the real and imaginary parts of (3.12) gives that
Therefore,
where
Since \((u_{\lambda },v_{\lambda })\) is bounded for \(\lambda \in (\lambda _*,\lambda ^*]\), then there is a constant \(M>0\) such that \(\Vert r^{i\lambda }_j\Vert _{\infty }<M (i,j=1,2)\). Now, the boundedness of \(\dfrac{\omega }{\lambda -\lambda _*}\) for \(\lambda \in (\lambda _*,\lambda ^*]\) can be obtained from the continuity of \(\lambda \mapsto (\beta _{\lambda }, c_{\lambda }, \Vert \xi _{\lambda }\Vert _{\infty }, \Vert \eta _{\lambda }\Vert _{\infty })\). The proof is finished. \(\square \)
By the decomposition \({\mathbb {X}}^2={\mathscr {N}}({\mathcal {L}}_{\lambda _*})\oplus X_1^2\), for \(\lambda \in (\lambda _*,\lambda ^*]\), ignoring a scalar factor, we can rewrite \(\psi =(\psi _1,\psi _2)^T\) in (3.11) as the form
Setting \(h:=\omega /(\lambda -\lambda _*)\), and substituting (2.3), (3.13) and \(\omega =(\lambda -\lambda _*)h\) into Eq. (3.11), then Eq. (3.11) can be transformed as the following equivalent system:
where \(h_i(\xi _{\lambda },\eta _{\lambda },\beta _{\lambda },c_{\lambda },\lambda )\) is defined in (2.6), and the operator L is defined as in Lemma 1. Define \(G:X_1^2\times {\mathbb {R}}^4\times {\mathbb {R}}\rightarrow {\mathbb {Y}}_{{\mathbb {C}}}^2\) by
Now, we show that \(G(z_1,z_2,p_1,p_2,h,\theta ,\lambda )=0\) is uniquely solvable when \(\lambda =\lambda _*\).
Lemma 2
Under assumptions \(\mathbf{(H_1)}-\mathbf{(H_3)}\), the equation
has a unique solution \((z_{1\lambda _*},z_{2\lambda _*},p_{1\lambda _*},p_{2\lambda _*},h_{\lambda _*},\theta _{\lambda _*})\) satisfying that \(p_{2\lambda _*}=0, \theta _{\lambda _*}=\dfrac{\pi }{2}\), \(p_{1\lambda _*}\) is the positive root of the following equation
and
and \((z_{1\lambda _*},z_{2\lambda _*})^T\in X_{1{\mathbb {C}}}^2\) is the unique solution of
where \({\mathcal {L}}\) is defined as (2.2)
Proof
When \(\lambda =\lambda _*\), we have
Then
is solvable if and only if
That is,
From (3.15), we see that \(p_1+ip_2\) is a root of
Due to assumptions \(\mathbf{(H_2)},\mathbf{(H_3)}\) and \(p_1\ge 0\), there holds that \(p_2=p_{2\lambda _*}=0\) and \(p_1=p_{1\lambda _*}\) is the unique positive root of above quadratic equation. Now, it can be derived from (3.15) that \(\theta =\theta _{\lambda _*}=\frac{\pi }{2}\) and
The proof is finished. \(\square \)
In what follows, we will provide the solvability result of the equation \(G=0\) for \(\lambda \) near \(\lambda _*\) by applying the implicit function theorem.
Theorem 3
Assume that the assumptions \(\mathbf{(H_1)}-\mathbf{(H_3)}\) hold, then the following statements are true:
-
(i)
there exist \({{\tilde{\lambda }}}^*>\lambda _*\) and a continuously differentiable mapping \(\lambda \mapsto (z_{1\lambda },z_{2\lambda },p_{1\lambda },p_{2\lambda },h_{\lambda },\theta _{\lambda })\) from \([\lambda _*,{{\tilde{\lambda }}}^*]\) to \(X_{1{\mathbb {C}}}^2\times {\mathbb {R}}^4\) such that \(G(z_{1\lambda },z_{2\lambda },p_{1\lambda },p_{2\lambda },h_{\lambda },\theta _{\lambda },\lambda )=0\);
-
(ii)
if \((z_1^{\lambda },z_{2}^{\lambda },r_1^{\lambda },r_2^{\lambda },h^{\lambda },\theta ^{\lambda })\) with \(h^{\lambda }>0,\theta ^{\lambda }>0\) solves \(G(\cdot ,\lambda )=0\) for \(\lambda \in [\lambda _*,{{\tilde{\lambda }}}^*]\), then \((z_1^{\lambda },z_2^{\lambda },r_1^{\lambda },r_2^{\lambda },\) \(h^{\lambda },\theta ^{\lambda })=(z_{1\lambda },z_{2\lambda },r_{1\lambda },r_{2\lambda },h_{\lambda },\theta _{\lambda })\).
Proof
Denote by \(T=(T_1,T_2): X_{1{\mathbb {C}}}^2\times {\mathbb {R}}^4\rightarrow {\mathbb {Y}}_{{\mathbb {C}}}^2\) the Fréchet derivative of G with respect to \((z_1,z_2,p_1,p_2,h,\theta )\) evaluated at \((z_{1\lambda _*},z_{2\lambda _*},p_{1\lambda _*},p_{2\lambda _*},h_{\lambda _*},\theta _{\lambda _*},\lambda _*)\). A direct calculation gives
Next, we show that T is a bijection from \(X_{1{\mathbb {C}}}^2\times {\mathbb {R}}^4\) to \({\mathbb {Y}}_{{\mathbb {C}}}^2\). We first prove T is injective. If \(T(\chi _1,\chi _2,\nu _1,\nu _2,\epsilon ,\vartheta )=0\), then
It can be seen from (3.15) that
This result combined with (3.16) leads to that
Then from assumption \(\mathbf{(H_2)},\mathbf{(H_3)}\), (3.17) and the definitions of \(\beta _{\lambda _*},c_{\lambda _*}\) and \(h_{\lambda _*}\), we obtain that
which implies that \(i\nu _1-\nu _2=0\), i.e. \(\nu _1=\nu _2=0\). Substituting \(i\nu _1-\nu _2=0\) into (3.16), we must have \(\epsilon =0\) and \(\vartheta =0\). Consequently, \(\chi _1=\chi _2=0\). So, T is injective from \(X_{1{\mathbb {C}}}^2\times {\mathbb {R}}^4\) to \({\mathbb {Y}}_{{\mathbb {C}}}^2\). By a similar manner to the proof of \(D_{(\xi ,\eta ,\beta ,c)}{\mathcal {F}}(\xi _{\lambda _*},\eta _{\lambda _*},\beta _{\lambda _*},c_{\lambda _*},\lambda _*)\) in Theorem 1, we can also prove T is surjective. Now, we have prove T is bijective. Therefore, part (i) can be obtained from the implicit function theorem immediately.
To show part (ii), we will check that if \(G(z_1^{\lambda },z_2^{\lambda },p_1^{\lambda },p_2^{\lambda },h^{\lambda },\theta ^{\lambda },\lambda )=0\) for \(h^{\lambda }>0,\theta ^{\lambda }\in [0,2\pi )\), then
as \(\lambda \rightarrow \lambda _*\) in the norm of \(X_{1{\mathbb {C}}}^2\times {\mathbb {R}}^4\). First, it follows from Lemma 1 (ii) that \(\{h^{\lambda }\}\) is bounded. As in Theorem 2.4 of [4], due to the boundedness of \(\{h^{\lambda }\},\{\theta ^{\lambda }\},\{\beta _{\lambda }\},\{c_{\lambda }\},\{\xi _{\lambda }\},\{\eta _{\lambda }\}\), there are \(M_1,M_2,M_3>0\) such that
where \(\lambda _2\) is defined in Lemma 1 (i). By setting \(0<{{\tilde{\lambda }}}^*-\lambda \ll 1\), we see that
for some constants \(M_4,M_5>0\). On the other hand, note that \(\langle \phi , L z_1^{\lambda } \rangle _w=0\), then it follows from the first equation of (3.14) that
By separating the real and imaginary parts of the above identity, we have
for some constants \(M_6,M_7>0\). Since \(0<{{\tilde{\lambda }}}^*-\lambda _* \ll 1\), then from (3.19) and (3.20) we get the boundedness of \(\{z_1^{\lambda }\}, \{z_2^{\lambda }\}, \{p_1^{\lambda }\}, \{p_2^{\lambda }\}\). Recall that the operator L has a bounded inverse from \(X_{1{\mathbb {C}}}\) to \(Y_{1{\mathbb {C}}}\). By acting \(L^{-1}\) on \(g_1\left( z_1^{\lambda },z_2^{\lambda },p_1^{\lambda },p_2^{\lambda },h^{\lambda },\theta ^{\lambda },\lambda \right) =0\) and \(g_2\left( z_1^{\lambda },z_2^{\lambda },p_1^{\lambda },p_2^{\lambda },h^{\lambda },\theta ^{\lambda },\lambda \right) =0\), we obtain that \(\{z_1^{\lambda }\}, \{z_2^{\lambda }\}\) are also bounded in \(X_{1{\mathbb {C}}}\) and hence \(\left\{ \left( z_1^{\lambda },z_2^{\lambda },p_1^{\lambda },p_2^{\lambda },h^{\lambda },\theta ^{\lambda } \right) :\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*] \right\} \) is precompact in \({\mathbb {Y}}_{{\mathbb {C}}}^2\times {\mathbb {R}}^4\) due to the embedding theorem. Let \(\left\{ \left( z_1^{\lambda ^n},z_2^{\lambda ^n},p_1^{\lambda ^n},p_2^{\lambda ^n},h^{\lambda ^n},\theta ^{\lambda ^n} \right) \right\} \) be any convergent subsequence satisfying
By taking the limit of equations
and
as \(n\rightarrow \infty \), there holds that
and \(G(z_1^{\lambda _*},z_2^{\lambda _*},p_1^{\lambda _*},p_2^{\lambda _*},h^{\lambda _*},\theta ^{\lambda _*},\lambda _*)=0\). Now we can oatain from the unique solvability of \(G(\cdot ,\lambda _*)=0\) in Lemma 2 that
This completes part (ii). \(\square \)
Now, Theorem 3 implies the following theorem immediately.
Theorem 4
Under assumptions \(\mathbf{(H_1)}-\mathbf{(H_3)}\), for \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\), the eigenvalue problem
has a solution \((\omega ,\tau ,\psi )\), or equivalently, \(i\omega \in \sigma (A_{\tau ,\lambda })\) if and only if
where e is a nonzero constant and \(\left( z_{1\lambda },z_{2\lambda },p_{1\lambda },p_{2\lambda },h_{\lambda },\theta _{\lambda }\right) \) is defined as in Theorem 3.
From Theorem 4, we know that \(i\omega _{\lambda } \in \sigma (A_{\tau _n,\lambda })\) with the associated eigenvector \(\psi _{\lambda }e^{i\omega _{\lambda }(\cdot )}\), which implies that \(-i\omega _{\lambda } \in \sigma (A_{\tau _n,\lambda }^*)\) and the corresponding adjoint equation
or equivalently,
is solvable for \({{\tilde{\psi }}} \in {\mathbb {X}}_{{\mathbb {C}}}^2\setminus \{(0,0)\}\). Similarly, ignoring a scalar factor, \({{\tilde{\psi }}}=({{\tilde{\psi }}}_1,{{\tilde{\psi }}}_2)^T\) can also be taken as the form
Substituting (2.3), (3.23) and \(\omega _{\lambda }=(\lambda -\lambda _*)h_{\lambda }\) into Eq. (3.22), we have the following equivalent system to Eq. (3.22):
Define \({\tilde{G}}:{\mathbb {X}}_{{\mathbb {C}}}^2\times {\mathbb {R}}^2\times {\mathbb {R}}\rightarrow {\mathbb {Y}}_{{\mathbb {C}}}^2\) as
By a similar argument as in Theorem 3 and 4 , we can prove the following conclusions.
Theorem 5
Assume that \(\mathbf{(H_1)}-\mathbf{(H_3)}\) hold. Then the following statements are true:
-
(i)
there exists a continuously differentiable mapping \(\lambda \mapsto ({\tilde{z}}_{1\lambda },{\tilde{z}}_{2\lambda },{\tilde{p}}_{1\lambda },{\tilde{p}}_{2\lambda })\) from \([\lambda _*,{{\tilde{\lambda }}}^*]\) to \(X_{1{\mathbb {C}}}^2\times {\mathbb {R}}^2\) such that \({\tilde{G}}({\tilde{z}}_{1\lambda },{\tilde{z}}_{2\lambda },{\tilde{p}}_{1\lambda },{\tilde{p}}_{2\lambda },\lambda )=0\) with \({\tilde{p}}_{2\lambda _*}=0\), \({\tilde{p}}_{1\lambda _*}\) is the positive root of the following equation
$$\begin{aligned} \kappa _{21}(\kappa _{21}-\kappa _{11})p^2+(\kappa _{11}\kappa _{12}-\kappa _{22}\kappa _{21})p-\kappa _{12}(\kappa _{12}-\kappa _{22})=0, \end{aligned}$$and \(({\tilde{z}}_{1\lambda _*},{\tilde{z}}_{2\lambda _*})^T\in X_{1{\mathbb {C}}}^2\) is the unique solution of
$$\begin{aligned} {\mathcal {L}}\begin{pmatrix} {\tilde{z}}_{1\lambda _*} \\ {\tilde{z}}_{2\lambda _*} \end{pmatrix}&=-(m(x)+ih_{\lambda _*})\phi \begin{pmatrix} 1 \\ {\tilde{p}}_{1\lambda _*} \end{pmatrix} -\lambda _*\phi \begin{pmatrix} \beta _{\lambda _*}r^1_1(x){\widetilde{k}}_{11}(x)+r^1_2(x){\widetilde{k}}_{12}(x) \\ {\tilde{p}}_{1\lambda _*}\big ( \beta _{\lambda _*}r^2_1(x){\widetilde{k}}_{21}(x)+r^2_2(x){\widetilde{k}}_{22}(x) \big ) \end{pmatrix} \\&\quad \, \, -i\lambda _* \begin{pmatrix} \beta _{\lambda _*}\int _{\varOmega }r^1_1(x){\widetilde{K}}_{11}(x,\cdot )\phi ^2(x)\mathrm {d}x+{\tilde{p}}_{1\lambda _*}c_{\lambda _*}\int _{\varOmega }r^2_1(x){\widetilde{K}}_{21}(x,\cdot )\phi ^2(x)\mathrm {d}x \\ \beta _{\lambda _*}\int _{\varOmega }r^1_2(x){\widetilde{K}}_{12}(x,\cdot )\phi ^2(x)\mathrm {d}x+{\tilde{p}}_{1\lambda _*}c_{\lambda _*}\int _{\varOmega }r^2_2(x){\widetilde{K}}_{22}(x,\cdot )\phi ^2(x)\mathrm {d}x \end{pmatrix}, \end{aligned}$$where \({\mathcal {L}}\) is defined as (2.2). Moreover, if there is \(({\tilde{z}}_1^{\lambda },{\tilde{z}}_{2}^{\lambda },{\tilde{p}}_1^{\lambda },{\tilde{p}}_2^{\lambda })\) such that \({\tilde{G}}({\tilde{z}}_1^{\lambda },{\tilde{z}}_2^{\lambda },{\tilde{p}}_1^{\lambda },{\tilde{p}}_2^{\lambda },\lambda )=0\), then \(({\tilde{z}}_1^{\lambda },{\tilde{z}}_2^{\lambda },{\tilde{p}}_1^{\lambda },{\tilde{p}}_2^{\lambda })=({\tilde{z}}_{1\lambda },{\tilde{z}}_{2\lambda },{\tilde{p}}_{1\lambda },{\tilde{p}}_{2\lambda })\).
-
(ii)
for \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\), the eigenvalue problem
$$\begin{aligned} {{\tilde{\varLambda }}}(\lambda ,-i\omega ,\tau ){{\tilde{\psi }}}=0,\ \omega >0,\ \tau \ge 0,\ {{\tilde{\psi }}}\in {\mathbb {X}}_{{\mathbb {C}}}^2\setminus \{(0,0)\} \end{aligned}$$has a solution \((\omega ,\tau ,\psi )\), or equivalently, \(-i\omega \in \sigma (A_{\tau ,\lambda }^*)\) if and only if
$$\begin{aligned} \begin{aligned}&\omega =\omega _{\lambda }=(\lambda -\lambda _*)h_{\lambda },\ \ \tau =\tau _n=\frac{\theta _{\lambda }+2n\pi }{\omega _{\lambda }},\ n=0,1,2,\ldots , \\&\quad {{\tilde{\psi }}}={\tilde{e}}{{\tilde{\psi }}}_{\lambda } ={\tilde{e}} \begin{pmatrix} \phi +(\lambda -\lambda _*){\tilde{z}}_{1\lambda } \\ ({\tilde{p}}_{1\lambda }+i{\tilde{p}}_{2\lambda })\phi +(\lambda -\lambda _*){\tilde{z}}_{2\lambda } \end{pmatrix}, \end{aligned} \end{aligned}$$(3.25)where \({\tilde{e}}\) is a nonzero constant and \(\left( {\tilde{z}}_{1\lambda },{\tilde{z}}_{2\lambda },{\tilde{p}}_{1\lambda },{\tilde{p}}_{2\lambda }\right) \) is defined in part (i), \((h_{\lambda },\theta _{\lambda })\) is defined in Theorem 3.
Remark 1
Theorem 5 shows that \(-i\omega _{\lambda } \in \sigma (A_{\tau _n,\lambda }^*)\) with the associated eigenvector \({{\tilde{\psi }}}_{\lambda }e^{-i\omega _{\lambda }(\cdot )}\).
4 Stability and Hopf Bifurcation
Notice that system (1.5) always has the steady state (0, 0). Then we first consider the stability of (0, 0). Linearizing system (1.5) at (0, 0), we obtain the linear eigenvalue problem
It follows from [5] that \(\sigma <0\) if and only if \(\lambda <\lambda _*\). Therefore, the stability result of the trivial steady state (0, 0) is as follows.
Lemma 3
Assume that \(\mathbf{(H_1)}\) holds. Then the trivial solution (0, 0) of system (1.2) is locally asymptotically stable when \(\lambda <\lambda _*\) and unstable when \(\lambda >\lambda _*\).
In the following, we pay attention to the stability and associated Hopf bifurcation of the positive steady state \(U_{\lambda }=(u_{\lambda },v_{\lambda })^T\) of Eq. (1.5) by regarding the parameter \(\tau \) as the bifurcation parameter. Firstly, we show the stability of \(U_{\lambda }\) for \(\tau =0\).
Theorem 6
Assume that assumptions \(\mathbf{(H_1)}-\mathbf{(H_3)}\) hold, then for each \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\), all the eigenvalues of \(A_{\tau ,\lambda }\) have negative real parts when \(\tau =0\). That is, the positive steady state \((u_{\lambda },v_{\lambda })\) of Eq. (1.5) is locally asymptotically stable when \(\tau =0\).
Proof
Suppose to the contrary that there exists a sequence \(\{\lambda ^n\}_{n=1}^{\infty }\) such that \(\lambda ^n>\lambda _*\) for \(n\ge 1\), \(\lim \limits _{n\rightarrow \infty }\lambda ^n=\lambda _*\), and for every n, the eigenvalue equation
admits an eigenvalue \(\mu _{\lambda ^n}\) with nonnegative real part, whose corresponding eigenfunction \(\psi _{\lambda ^n}\) satisfies \(\Vert \psi _{\lambda ^n}\Vert _{{\mathbb {Y}}_{{\mathbb {C}}}}=1\). We can take \(\psi _{\lambda ^n}\) as \(\psi _{\lambda ^n}=s_{\lambda ^n}U_{\lambda ^n}+V_{\lambda ^n}\) for each \(n\ge 1\), where \(U_{\lambda }^{n}\) is the positive steady state of Eq. (1.5) with \(\lambda =\lambda ^n\), \(s_{\lambda ^n}\in {\mathbb {C}}\) and \(V_{\lambda ^n}=(V_{1\lambda ^n},V_{2\lambda ^n})^T\in {\mathbb {X}}_{{\mathbb {C}}}^2\) satisfy that
Notice that
then by substituting \(\psi _{\lambda ^n}=s_{\lambda ^n}U_{\lambda ^n}+V_{\lambda ^n}\) and \(\mu =\mu _{\lambda ^n}\) into the first equation of Eq. (4.2), and computing the weighted inner product with \(\psi _{\lambda ^n}\), there holds that
Furthermore,
where
Define the operator \(A_{i\lambda }: {\mathbb {X}}_{{\mathbb {C}}}\rightarrow {\mathbb {Y}}_{{\mathbb {C}}}(i=1,2)\) by
for \(\varphi \in {\mathbb {X}}_{{\mathbb {C}}}\). Since 0 is the principal eigenvalue of \(A_{1\lambda ^n}\) (resp. \(A_{2\lambda ^n}\)) with the corresponding eigenfunction \(u_{\lambda ^n}\) (resp. \(v_{\lambda ^n}\)), we get that
This result leads to
and hence
From the fact that \(\left| \big \langle V_{i\lambda ^n},A_{i\lambda ^n}V_{i\lambda ^n} \big \rangle _w\right| \ge |\lambda _2^{(i)}(\lambda ^n)|\cdot \Vert V_{i\lambda ^n}\Vert _{{\mathbb {Y}}_{{\mathbb {C}}}}^2\) (the proof of this inequality is similar to that of Lemma 1 (i)), where \(\lambda _2^{(i)}(\lambda ^n)\) is the second eigenvalue of \(A_{i\lambda ^n}\), we obtain
in which \(\gamma ^n=\min \left\{ \lambda _2^{(1)}(\lambda ^n),\lambda _2^{(2)}(\lambda ^n) \right\} \). In view of (4.4), using the limit \(\lim \limits _{n\rightarrow \infty }\left| \big \langle \psi _{\lambda ^n},B_{\lambda ^n} \psi _{\lambda ^n} \big \rangle _w \right| =\lim \limits _{n\rightarrow \infty }|\mu _{\lambda ^n}|=0\), we see that \(\lim \limits _{n\rightarrow \infty }\Vert V_{\lambda ^n}\Vert _{{\mathbb {Y}}_{{\mathbb {C}}}}=0\).
Since \(\psi _{\lambda ^n}=s_{\lambda ^n}U_{\lambda ^n}+V_{\lambda ^n}\) and \(\Vert \psi _{\lambda ^n}\Vert _{{\mathbb {Y}}_{{\mathbb {C}}}}=1\), we see that
which means \(\lim _{n\rightarrow \infty }|s_{\lambda ^n}|(\lambda ^n-\lambda _*)=\dfrac{1}{\sqrt{\beta _{\lambda _*}^2+c_{\lambda _*}^2}\Vert \phi \Vert _{{\mathbb {Y}}_{{\mathbb {C}}}}}>0\), where \(\phi \) is the eigenfunction of eigenvalue problem (1.6) with the principal eigenvalue \(\lambda _*\). We now calculate that
where
It follows from Hölder inequality that
Then by using the limit \(\lim \limits _{n\rightarrow \infty }\Vert V_{\lambda ^n}\Vert _{{\mathbb {Y}}_{{\mathbb {C}}}}=0\), there holds that
We also have that
The above argument implies that there exists \(N_*\in {\mathbb {N}}\) such that
Consequently,
which is a contradiction with that \(\mathrm {Re}(\mu _{\lambda ^n})\ge 0\) for \(n\ge 1\). That is to say, \(A_{\tau ,\lambda }\) has no eigenvalue with nonnegative real parts when \(\tau =0\). The proof is finished. \(\square \)
Lemma 4
Assume that \(\mathbf{(H_1)}-\mathbf{(H_3)}\) hold. Then for each \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\), \(\mu =i\omega _{\lambda }\) is a simple eigenvalue of \(A_{\tau _n,\lambda }\) for \(n=0,1,2,\ldots \).
Proof
From Theorem 4, we see that \({\mathscr {N}}[A_{\tau _n,\lambda }-i\omega _{\lambda }]=\mathrm {Span}[e^{i\omega _{\lambda }s}\psi _{\lambda }]\), where \(s\in [-\tau _n,0]\) and \(\psi _{\lambda }\) is defined as in Theorem 4. Suppose that \(\mu =i\omega _{\lambda }\) is not a simple eigenvalue, then there exists \({{\hat{\phi }}} \in {\mathscr {N}}[A_{\tau _n,\lambda }-i\omega _{\lambda }]^2\), i.e.,
Hence, we can pick a constant a such that \([A_{\tau _n,\lambda }-i\omega _{\lambda }]{{\hat{\phi }}}=ae^{i\omega _{\lambda }s}\psi _{\lambda }\). Then there holds that
In view of the first equation of Eq. (4.5), we obtain that
It follows from the second equation of (4.5) and (4.6) that
where we have used the identity \({{\hat{\phi }}}(-\tau _n)={{\hat{\phi }}}(0)e^{-i\theta _{\lambda }}-a\tau _n e^{-i\theta _{\lambda }}\psi _{\lambda }\). From (3.6), we have
Let \(\lambda \rightarrow \lambda _*\), then it follows that
which implies that \(S_{n\lambda }\ne 0\) and hence \(a=0\). Therefore, \({\hat{\phi \in }} {\mathscr {N}}[A_{\tau _n,\lambda }-i\omega _{\lambda }]\). By induction it can be derived that
and \(\mu =i\omega _{\lambda }\) is a simple eigenvalue of \(A_{\tau _n,\lambda }\) for \(n=0,1,2,\ldots \). \(\square \)
Now it can be inferred from the implicit function theorem that there is a neighborhood \(O_n\times D_n\times H_n^2\subset {\mathbb {R}}\times {\mathbb {C}}\times {\mathbb {X}}_{{\mathbb {C}}}^2\) of \(\left( \tau _n,i\omega _{\lambda },\psi _{\lambda } \right) \) and a continuous differential function \((\mu ,\psi ):O_n\rightarrow D_n\times H_n^2\) satisfying \(\mu (\tau _n)=i\omega _{\lambda }\) and \(\psi (\tau _n)=\psi _{\lambda }\) such that, for each \(\tau \in O_n\), \(A_{\tau _n,\lambda }\) in \(D_n\) has the unique eigenvalue \(\mu (\tau )\) with its associated eigenvector \(\psi (\tau )e^{\mu (\tau )(\cdot )}\) and there holds that
In the following, we verify the transversality condition for Hopf bifurcation.
Lemma 5
Under the assumptions \(\mathbf{(H_1)}-\mathbf{(H_3)}\), for \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\),
Proof
Firstly, by differentiating Eq. (4.8) with respect to \(\tau \) at \(\tau =\tau _n\), we have
Then calculating the weighted inner product of above equation with \({{\tilde{\psi }}}_{\lambda }\) gives that
where \(S_{n\lambda }\) is defined as in (4.7),
Direct computation yields
which implies that
The proof is finished. \(\square \)
From Theorems 4, 6 and Lemmas 4, 5, we can now conclude the stability result of the positive steady state \(U_{\lambda }\) and the associated Hopf bifurcation of Eq. (1.5) as follows.
Theorem 7
Assume that \(\mathbf{(H_1)}-\mathbf{(H_3)}\) hold. For \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\), the following statements are ture:
-
(i)
there exists an increasing sequence \(\{\tau _n\}_{n=0}^{\infty }\) such that all the eigenvalues of \(A_{\tau ,\lambda }\) have negative real parts when \(\tau \in ( 0,\tau _0 )\), \(A_{\tau ,\lambda }\) has a pair of purely imaginary eigenvalues \(\pm i\omega _{\lambda }\left( \omega _{\lambda }>0 \right) \) when \(\tau =\tau _n\), and \(A_{\tau ,\lambda }\) has exactly \(2(n+1)\) eigenvalues with positive real parts when \(\tau \in ( \tau _n,\tau _{n+1} ], n=0,1,2,\ldots \);
-
(ii)
the positive steady state \(U_{\lambda }\) of Eq. (1.5) is locally asymptotically stable when \(\tau \in [0,\tau _0)\), and unstable when \(\tau \in (\tau _0,\infty )\);
-
(iii)
Hopf bifurcation occurs as the delay \(\tau \) increasingly crosses through each \(\tau _n(n=0,1,2,\ldots )\), and there exist \(\varepsilon _0>0\) and a continuous family of periodic orbits of (1.5) in form of
$$\begin{aligned} \left\{ \left( \tau _n(\varepsilon ),u_n(x,t,\varepsilon ),v_n(x,t,\varepsilon ),T_n(\varepsilon ) \right) :\varepsilon \in (0,\varepsilon _0) \right\} , \end{aligned}$$where \((u_n(x,t,\varepsilon ),v_n(x,t,\varepsilon ))^T\) is a \(T_n(\varepsilon )\)-periodic solution of (1.5) with \(\tau =\tau _n(\varepsilon )\), and \(\tau _n(0)=\tau _n,\) \(\lim \limits _{\varepsilon \rightarrow 0^+}(u_n(x,t,\varepsilon ),v_n(x,t,\varepsilon ))^T=(u_\lambda ,v_\lambda )^T\) and \(\lim \limits _{\varepsilon \rightarrow 0^+}T_n(\varepsilon )=2\pi /\omega _{\lambda }\).
5 The Properties of Hopf Bifurcation
In this section, we will compute the normal form of the Hopf bifurcation to determine the direction and stability of bifurcating periodic solutions emerging from \((U_{\lambda },\tau _n)\) by applying the methods in Faria [11] and Hassard et al. [16]. At first, we let \({\tilde{U}}(t)=(U_1(t),U_2(t))^T=(u(\cdot ,t)-u_{\lambda },v(\cdot ,t)-v_{\lambda })^T,\gamma =\tau -\tau _n\) such that the steady state \(U_{\lambda }=(u_{\lambda },v_{\lambda })^T\) and parameter \(\tau \) is translated to the origin. Re-scale the time \({\tilde{t}}= t/\tau \) and drop the tilde signs for simplification of notations. Thus, \(\gamma =0\) is the Hopf bifurcation value. For the simplicity of writing, we define
Then we can rewrite Eq. (1.5) as the following abstract functional differential equation
where \(U_t=U(t+s)\in {\mathcal {C}}=C([-\tau ,0],{\mathbb {Y}}^2)\), and
and \(F(U_t)=(F_1(U_t),F_2(U_t))^T\) is defined by
in which h.o.t stands for “high order terms”. Denote by \({\mathcal {A}}_{\tau _n}\) the infinitesimal generator of the linearized equation
Then from [32], we have
with the domain
where \({\mathcal {C}}_{{\mathbb {C}}}^1=C^1([-1,0],{\mathbb {Y}}_{{\mathbb {C}}}^2)\). So, we can rewrite Eq. (5.1) in the abstract form:
where
On the other hand, let
where \({\mathcal {C}}_{{\mathbb {C}}}^*=C([0,1],{\mathbb {Y}}_{{\mathbb {C}}}^2),({\mathcal {C}}_{{\mathbb {C}}}^*)^1=C^1([0,1],{\mathbb {Y}}_{{\mathbb {C}}}^2)\). Define a formal duality \(\langle \langle \cdot ,\cdot \rangle \rangle \) by
for \({{\tilde{\varPsi }}}\in {\mathscr {D}}({\mathcal {A}}_{\tau _n}^*)\) and \(\varPsi \in {\mathscr {D}}({\mathcal {A}}_{\tau _n})\). Then \({\mathcal {A}}_{\tau _n}^*\) and \({\mathcal {A}}_{\tau _n}\) satisfy
for \({{\tilde{\varPsi }}}\in {\mathscr {D}}({\mathcal {A}}_{\tau _n}^*)\) and \(\varPsi \in {\mathscr {D}}({\mathcal {A}}_{\tau _n})\). The above equality means that \({\mathcal {A}}_{\tau _n}^*\) and \({\mathcal {A}}_{\tau _n}\) are adjoint operators under the bilinear form (5.4).
It can be seen from Theorem 4 that \({\mathcal {A}}_{\tau _n}\) has a pair of simple purely imaginary eigenvalues \(\pm i\omega _{\lambda }\tau _n\). Then the eigenfunction corresponding to \(i\omega _{\lambda }\tau _n\) (resp. \(-i\omega _{\lambda }\tau _n\)) is \(p(s)=\psi _{\lambda }e^{i\omega _{\lambda }\tau _ns}\) (resp. \({\overline{p}}(s)={\overline{\psi }}_{\lambda }e^{-i\omega _{\lambda }\tau _ns}\)) for \(s\in [-1,0]\), where \(\psi _{\lambda }\) is defined as in (3.21). At the same time, it follows from Theorem 5 and Remark 1 that \(\pm i\omega _{\lambda }\tau _n\) are also a pair of simple purely imaginary eigenvalues of the operator \({\mathcal {A}}_{\tau _n}^*\) and the eigenfunction associated with \(-i\omega _{\lambda }\tau _n\) (resp. \(i\omega _{\lambda }\tau _n\)) is \(q({\tilde{s}})={{\tilde{\psi }}}_{\lambda }e^{i\omega _{\lambda }\tau _n{\tilde{s}}}\) (resp. \({\overline{q}}({\tilde{s}})=\overline{{{\tilde{\psi }}}}_{\lambda }e^{-i\omega _{\lambda }\tau _n{\tilde{s}}}\)) for \({\tilde{s}}\in [0,1]\), where \({{\tilde{\psi }}}_{\lambda }\) is defined in Theorem 5. Following from [32], the center subspace of Eq. (5.1) is \(P=\mathrm {span}\{ p(s),{\overline{p}}(s) \}\), and the formal adjoint subspace of P with respect to the bilinear form (5.4) is \(P^*=\mathrm {span}\{ q({\tilde{s}}),{\overline{q}}({\tilde{s}}) \}\). Let \(\varPhi (s)=(p(s),{\overline{p}}(s)),\varPsi ({\tilde{s}})=\left( \dfrac{q({\tilde{s}})}{\overline{S_{n\lambda }}},\dfrac{{\overline{q}}({\tilde{s}})}{S_{n\lambda }} \right) ^T\). It is easy to verify that \(\langle \langle \varPsi ,\varPhi \rangle \rangle =I\), where \(I\in {\mathbb {R}}^{2\times 2}\) is a identity matrix. Actually, we can decompose \({\mathcal {C}}_{{\mathbb {C}}}\) as \({\mathcal {C}}_{{\mathbb {C}}}=P\oplus Q\), where
Following the idea of Hassard et al. [16], the formulas determining the bifurcation direction and stability are all relative to \(\gamma =0\). In the remainder of this section, we take \(\gamma =0\) and define
Then we obtain a center manifold \(\mathbf{C}_0\):
where z and \({\overline{z}}\) are local coordinates for the center manifold \(\mathbf{C}_0\) in the direction of q and \({\overline{q}}\). From (5.5), for \(\gamma =0\), we see that
Then,
We now calculate that
where \({\mathcal {T}}_1\) is given by
\({\mathcal {T}}_2=({\mathcal {T}}_2^{(1)},{\mathcal {T}}_2^{(2)})^T\) is given by
\({\mathcal {T}}_3=({\mathcal {T}}_3^{(1)},{\mathcal {T}}_3^{(2)})^T\) is given by
and \({\mathcal {T}}_4=({\mathcal {T}}_4^{(1)},{\mathcal {T}}_4^{(2)})^T\) is given by
for \(\varphi _i=(\varphi _i^{(1)},\varphi _i^{(2)})^T\in {\mathbb {Y}}^2,i=1,2,3\). From (5.8), we see that there are only \(W_{20}(s)\) and \(W_{11}(s)\) in \(g_{21}\) left to calculate.
It can be deduced from (5.3) and (5.5) that
Meanwhile, W also satisfies that
on the center manifold \(\mathbf{C}_0\) near the origin. Combining the above equation with Eq. (5.9), we have
and
To compute \(W_{20}\), from (5.10), we have
Note that \(p(s)=\psi _{\lambda }e^{i\omega _{\lambda }\tau _ns}\), then there holds that
Especially, Eqs. (5.10) and (5.12) imply that
or equivalently,
Notice that \(2i\omega _{\lambda }\) is not the eigenvalue of \(A_{\tau _n,\lambda }\) for \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\). Then
Similarly, we can derive from (5.11) that, for \(s \in [-1,0)\),
and when \(s=0\), F satisfies
Thus, we obtain
Lemma 6
Let E and F be defined in (5.13) and (5.15), respectively. Assume that \(\mathbf{(H_1)}-\mathbf{(H_3)}\) hold, then for \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\),
where \(U_{\lambda }=(u_{\lambda },v_{\lambda })^T\) is defined in (2.3), \(\varphi _{\lambda }\) and \({{\tilde{\varphi }}}_{\lambda }\) satisfy
and the constant \(\rho _{\lambda }\) satisfies
Proof
We only show the estimate for E, and that for F can be proved in a similar manner. Since \(A_{\lambda }U_{\lambda }=0\), by substituting E, defined as in (5.16), into Eq. (5.13), we obtain
Calculating the weighted inner product of Eq. (5.17) with \(U_{\lambda }\) gives that
By calculating the weighted inner product of Eq. (5.17) with \(\varphi _{\lambda }\), we see
Recall that
Then we have
Hence from Eq. (5.18), there exist constants \({{\tilde{\lambda }}}^*>\lambda _*\) and \(M_1,M_2>0\) so that for any \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*)\),
Similar to the proof of Lemma 2.3 of [4], we have
where \(\lambda _2(\lambda )\) is the second eigenvalue of \(-A(\lambda )\). On the other hand, we can also obtain from (5.19), (5.20) and (5.21) that there exist constants \(M_3,M_4>0\) such that for any \(\lambda \in (\lambda _*,{{\tilde{\lambda }}})\),
Note that \(\lim \limits _{\lambda \rightarrow \lambda _*}\lambda _2(\lambda )=\lambda _2>0\), where \(\lambda _2\), defined as in Lemma 1 (i), is the second eigenvalue of \(-L\), then \(\lim \limits _{\lambda \rightarrow \lambda _*}\Vert \varphi _{\lambda }\Vert _{{\mathbb {Y}}_{{\mathbb {C}}}^2}=0\). Now, we can derive from (5.18) that
The proof is finished. \(\square \)
From (5.8), we see that each \(g_{kl}\) is determined by the parameters of original system (1.5). Notice that
Then we can compute that
which combined with (5.12) and (5.14) yields
Consequently, we have obtained the normal form (5.6) restricted on the center manifold \(\mathbf{C}_0\) by computing the coefficients \(g_{20},g_{11},g_{02}\) and \(g_{21}\). Denote
Then, we have
which determine the properties of bifurcating periodic solutions at critical value \(\tau _n\), that is,
-
(i)
\(\mu _2\) determines the direction of the Hopf bifurcation: if \(\mu _2>0(<0)\), then the direction of the Hopf bifurcation is forward (backward) and the bifurcating periodic solutions exist for \(\tau > \tau _n(\tau < \tau _n)\);
-
(ii)
\(\beta _2\) determines the stability of the bifurcating periodic solutions: if \(\beta _2 <0( >0)\), then the bifurcating periodic solutions are orbitally asymptotically stable (unstable) on the center manifold;
-
(iii)
\(T_2\) determines the period of bifurcating periodic solutions: if \(T_2 >0(< 0)\), then the period of the bifurcating periodic solutions increases (decreases).
Under assumptions \(\mathbf{(H_2)}\) and \(\mathbf{(H_3)}\), there holds that
Now, the following result is obtained.
Theorem 8
Assume that \(\mathbf{(H_1)}-\mathbf{(H_3)}\) hold, and \(\lambda \in (\lambda _*,\lambda ^*]\) with \(0<\lambda ^*-\lambda _*\ll 1\). Let \(\tau _n(\lambda )\) given as in (3.21) be the Hopf bifurcation points for Eq. (1.5) where spatially nonhomogeneous periodic orbits of Eq. (1.5) emerge from \((\tau _n,u_{\lambda },v_{\lambda })\). Then for \(n\in {\mathbb {N}} \cup \{0\}\), the direction of the Hopf bifurcation at \(\tau =\tau _n\) is forward and the bifurcating periodic solutions are orbitally asymptotically stable on the center manifold. Especially, there exist \(\varepsilon _0>0\) such that (1.5) has a locally asymptotically stable spatially nonhomogeneous periodic solution for \(\tau \in (\tau _0,\tau _0+\varepsilon _0)\).
6 A Lotka–Volterra Competition–Diffusion–Advection Model with Nonlocal Delay
In this section we choose the following Lotka–Volterra competitive system as examples
where \(a_{11},a_{22},a_{12},a_{21}>0\) and k(x, y) is a continuous nonnegative function on \(\varOmega \times \varOmega \). Then (6.1) is a competitive system. Similar to Eq. (1.5), we can also obtain an equivalent model of Eq. (6.1) as follows:
where \(\lambda =1/d,\alpha =a/d\) and \(K(x,y)=k(x,y)e^{\alpha m(y)}\). Here m(x) satisfies the assumption \(\mathbf{(H_1)}\).
Suppose that (u, v) is a positive steady state of (6.2) satisfying
Multiplying the first equation of (6.3) by \(e^{\alpha m(x)}\phi \) and integrating the result over \(\varOmega \), we have
Therefore, the problem (6.2) has no positive steady state if \(\lambda <\lambda _*\).
Let
Suppose that \(\frac{a_{11}}{a_{21}}>1>\frac{a_{12}}{a_{22}}\). Then one can easily check that \(\mathbf{(H_2)}\) and \(\mathbf{(H_3)}\) are satisfied. According to Lemma 3, Theorems 1, 7 and 8 , we obtain the following conclusions for (6.2) which is competitive:
-
(i)
When \(0<\lambda <\lambda _*\), the trivial steady state (0, 0) is the unique nonnegative steady state of (6.2), which is locally asymptotically stable;
-
(ii)
When \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\) with \(0<{{\tilde{\lambda }}}^*-\lambda _*\ll 1\), system (6.2) admits a spatially nonhomogeneous positive steady state \((u_{\lambda },v_{\lambda })\);
-
(iii)
For \(\lambda \in (\lambda _*,{{\tilde{\lambda }}}^*]\), there exists a critical point \(\tau _0\) such that the positive steady state \((u_{\lambda },v_{\lambda })\) is locally asymptotically stable if \(\tau \in [0,\tau _0)\), and unstable if \(\tau \in (\tau _0,\infty )\);
-
(iv)
System (6.2) undergoes a supercritical Hopf bifurcation at the positive steady state \((u_{\lambda },v_{\lambda })\) when \(\tau =\tau _0\), and there exists a locally stable spatially nonhomogeneous time-periodic solution for \(\tau \in (\tau _0,\tau _0+\varepsilon _0)\), where \(\varepsilon _0>0\) is small.
It follows from Lemma 2 and Theorem 4 that
where \(p_{1\lambda _*}\) is the positive root of the equation
and the first Hopf bifurcation value satisfies
Since \(\frac{a_{11}}{a_{21}}>1>\frac{a_{12}}{a_{22}}\), we have \(\frac{(a_{22}-a_{12})(a_{11}+a_{12}p_{1\lambda _*})}{(a_{11}a_{22}-a_{12}a_{21})}>0\). By the similar argument to [8, Proposition 4.7], we can derive that \(h_{\lambda _*(\alpha )}(\alpha )\) is strictly increasing with respect to \(\alpha \in [0,\infty )\). Then we show how the advection rate affects the Hopf bifurcation value with respect to sufficiently small \(\alpha >0\).
Proposition 1
Assume that \(\frac{a_{11}}{a_{21}}>1>\frac{a_{12}}{a_{22}}\) and the non-constant function m(x) satisfies \(\mathbf{(H_1)}\) and
Then there exist \(\delta _1,\delta _2>0\) such that \(\tau _0(\lambda ,\alpha )\) is strictly decreasing with respect to \(\alpha \in [0,\delta _1)\) for \(\lambda \in (\lambda _*(0),\lambda _*(0)+\delta _2)\).
Remark 2
Proposition 1 implies that Hopf bifurcation is more likely to occur when adding a term describing advection along the environmental gradients for the diffusive Lotka–Volterra competition model with nonlocal delay. One can use an argument similar to [19, Theorem 5.1] to prove Proposition 1.
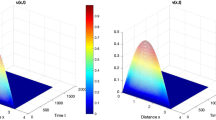
In the following we give some numerical simulations to verify our analysis results. In order to maintain the real time scale, we will simulate the original competitive system (6.1), then the critical value for stability switch is \(\tau _0/d\). We take \(\varOmega =(0,\pi )\), the space step as \(\pi /50\) and the time step as 0.001. In numerical simulations, different types of patterns are observed and we have found that the distribution of species u and v is always of the same type. For the sake of simplicity, only the patterns of the distribution of species u are given here for instance. Choose the following parameter set:
and initial condition:

Numerical simulations of (6.1) for \(d=1,a=0.01\) with parameter set (P) and initial condition (IC). Left: \(\tau =0\); Right: \(\tau =2\)

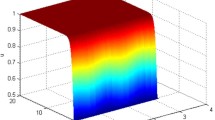
Numerical simulations of (6.1) for \(d=0.06,a=0.01\) with parameter set (P) and initial condition (IC). Left: \(\tau =1.5\); Right: \(\tau =2\)

Numerical simulations of (6.1) for \(d=0.06,a=1\) with parameter set (P) and initial condition (IC). Left: \(\tau =0.2\); Right: \(\tau =1.5\)

Numerical simulations of (6.1) for discrete delay case with \(d=0.06\), parameter set (P) and initial condition (IC). Here \(a=0.01\). Left: \(\tau =1.5\); Right: \(\tau =2\)
It follows from previous argument that system (6.1) admits no positive steady state if \(d>1/\lambda _*\). Then we choose \(d=1\) in Fig. 1, and observe that the solution of (6.1) converges to trivial steady state (0, 0) both when \(\tau =0\) and \(\tau =2\).
The influence of the time delay \(\tau \) on the solution of (6.1) can be observed clearly in Fig. 2. We first set \(d=0.06,a=0.01\). According to our theoretical analysis, when \(\tau <\tau _0/d\), the positive steady state \((u_d,v_d)=(e^{am(x)/d}{\tilde{u}}_{\lambda },e^{am(x)/d}{\tilde{v}}_{\lambda })\) of (6.1) is locally asymptotically stable, while if \(\tau >\tau _0/d\) a forward Hopf bifurcation occurs, the positive steady state \((u_d,v_d)\) loses its stability and the bifurcation periodic solution is stable. The left graph in Fig. 2 show the existence of stable nonhomogeneous positive steady state and the right graph in Fig. 2 depicts the occurrence of stable periodic solutions with obvious oscillation. In Fig. 3, letting \(a=1\), we see that the solution of (6.1) converges to a positive steady state when \(\tau =0.2\); when \(\tau =1.5\), the solution of (6.1) converges to a time-periodic solution. Then Figs. 2, 3 show that, the critical Hopf bifurcation value for stability switch decreases as the advection rate a increasing.
In Fig. 4, we show the simulation for the discrete delay case that \(k(x,y)=\delta (x-y)\) in (6.1), which has been studied in [21]. By comparing Figs. 2 and 4, we see that the nonlocal delay makes the positive steady state and time-periodic solution smaller. In biology, this means that the nonlocal delay causes the intraspecific and interspecific competitions more fiercely.
References
Arino, O., Hbid, M.L., Ait Dads, E.: Delay Differential Equations and Applications, pp. 477–517. Springer, Berlin (2006)
Belgacem, F., Cosner, C.: The effects of dispersal along environmental gradients on the dynamics of populations in heterogeneous environment. Can. Appl. Math. Q. 3(4), 379–397 (1995)
Britton, N.F.: Spatial structures and periodic travelling waves in an integro-differential reaction–diffusion population model. SIAM J. Appl. Math. 50(6), 1663–1688 (1990)
Busenberg, S., Huang, W.: Stability and Hopf bifurcation for a population delay model with diffusion effects. J. Differ. Equ. 124(1), 80–107 (1996)
Cantrell, R.S., Cosner, C.: Spatial Ecology via Reaction–Diffusion Equations. Wiley, Chichester (2003)
Chen, S., Shi, J.: Stability and Hopf bifurcation in a diffusive logistic population model with nonlocal delay effect. J. Differ. Equ. 253(12), 3440–3470 (2012)
Chen, S., Shi, J.: Global dynamics of the diffusive Lotka–Volterra competition model with stage structure. Calculus Var. Partial Differ. Equ. 59, 33 (2020)
Chen, S., Lou, Y., Wei, J.: Hopf bifurcation in a delayed reaction–diffusion–advection population model. J. Differ. Equ. 264(8), 5333–5359 (2018)
Cosner, C., Lou, Y.: Does movement toward better environments always benefit a population? J. Math. Anal. Appl. 277, 489–503 (2003)
Dockery, J., Hutson, V., Mischaikow, K., Pernarowski, M.: The evolution of slow dispersal rates: a reaction–diffusion model. J. Math. Biol. 37, 61–83 (1998)
Faria, T.: Normal forms and Hopf bifurcation for partial differential equations with delays. Trans. Am. Math. Soc. 352(5), 2217–2238 (2000)
Gourley, S.A., So, J.W.-H.: Dynamics of a food-limited population model incorporating nonlocal delays on a finite domain. J. Math. Biol. 44(1), 49–78 (2002)
Guo, S.: Stability and bifurcation in a reaction–diffusion model with nonlocal delay effect. J. Differ. Equ. 259, 1409–1448 (2015)
Guo, S., Yan, S.: Hopf bifurcation in a diffusive Lotka–Volterra type system with nonlocal delay effect. J. Differ. Equ. 260, 781–817 (2016)
Han, R., Dai, B.: Hopf bifurcation in a reaction-diffusive two-species model with nonlocal delay effect and general functional response. Chaos Soliton Fract. 96, 90–109 (2017)
Hassard, B.D., Kazarinoff, N.D., Wan, Y.: Theory and Applications of Hopf Bifurcation. Cambridge University Press, Cambridge (1981)
He, X., Ni, W.-M.: Global dynamics of the Lotka-Volterra competition-diffusion system: diffusion and spatial heterogeneity I. Commun. Pure Appl. Math. 69, 981–1014 (2016)
Hu, R., Yuan, Y.: Spatially nonhomogeneous equilibrium in a reaction–diffusion system with distributed delay. J. Differ. Equ. 250, 2779–2806 (2011)
Jin, Z., Yuan, R.: Hopf bifurcation in a reaction–diffusion–advection equation with nonlocal delay effect. J. Differ. Equ. 271, 533–562 (2021)
Li, Z., Dai, B., Dong, X.: Global stability of nonhomogeneous steady-state solution in a Lotka–Volterra competition–diffusion–advection model. Appl. Math. Lett. 107, 106480 (2020)
Li, Z., Dai, B.: Stability and Hopf bifurcation analysis in a Lotka–Volterra competition–diffusion–advection model with time delay effect. Nonlinearity 34, 3271–3313 (2021)
Lou, Y.: On the effects of migration and spatial heterogeneity on single and multiple species. J. Differ. Equ. 223, 400–426 (2006)
Lou, Y.: Some Challenging Mathematical Problems in Evolution of Dispersal and Population Dynamics, pp. 171–205. Springer, Berlin (2007)
Lou, Y., Zhou, P.: Evolution of dispersal in advective homogeneous environment: the effect of boundary conditions. J. Differ. Equ. 259, 141–171 (2015)
Murray, J.D.: Mathematical Biology, II: Spatial Models and Biomedical Applications. Springer, New York (2003)
Ni, W., Shi, J., Wang, M.: Global stability and pattern formation in a nonlocal diffusive Lotka–Volterra competition model. J. Differ. Equ. 264, 6891–6932 (2018)
Okubo, A., Levin, S.A.: Diffusion and Ecological Problems: Modern Perspectives, 2nd edn. Springer, New York (2001)
Pazy, A.: Semigroups of Linear Operators and Applications to Partial Differential Equations. Springer, New York (1983)
Song, Y., Han, M., Peng, Y.: Stability and Hopf bifurcations in a competitive Lotka–Volterra system with two delays. Chaos Solitons Fract. 22, 1139–1148 (2004)
Smith, H.: An Introduction to Delay Differential Equations with Applications to the Life Sciences. Springer, New York (2011)
Tang, Y., Zhou, L.: Hopf bifurcation and stability of a competitive diffusion system with distributed delay. Publ. Res. Inst. Math. Sci. 41, 579–597 (2005)
Wu, J.: Theory and Applications of Partial Functional Differential Equations. Springer, New York (1996)
Zhou, L., Tang, Y., Hussein, S.: Stability and Hopf bifurcation for a delay competition diffusion system. Chaos Solitons Fract. 14, 1201–1225 (2002)
Acknowledgements
Z. Li is supported by the Fundamental Research Funds for the Central Universities of Central South University (No. 2020zzts040), B. Dai is supported by the National Natural Science Foundation of China (No. 11871475) and R. Han is supported by the Youth Foundation of Zhejiang University of Science and Technology (No. XJ2021003203).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Li, Z., Dai, B. & Han, R. Hopf Bifurcation in a Reaction–Diffusion–Advection Two Species Model with Nonlocal Delay Effect. J Dyn Diff Equat 35, 2453–2486 (2023). https://doi.org/10.1007/s10884-021-10046-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10884-021-10046-w