
Abstract
I review progress in the last few years in constructing and analyzing many new classes of black holes that are possible in spacetimes of dimension larger than four.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Had I been invited to give this talk at GR16 in July 2001—the first GR meeting that I attended—it would have been a rather different one. The subtitle “Approximate methods” would not have been there—as only exact solutions were known at the time—and my slides would have included just a description of the higher-dimensional generalization of the Kerr solution obtained by Myers and Perry (MP) fifteen years earlier. I would have finished “that’s it, thank you!”, much earlier than receiving any signal from my chairman.
Twelve years later the situation has changed dramatically. In this period we have uncovered large numbers of qualitatively new solutions, most of them known only through approximate constructions (with virtually no hope of finding almost any of them in closed analytic form), and with good evidence that these are just the proverbial tip of the iceberg. Nowadays we know of: black holes whose horizon topology is not spherical, but rather in the shape of a ring, \(S^1\times S^2\), or of other products of spheres; rotating multi-black hole solutions; horizons of spherical topology but which are ‘rippled’; ‘helical’ horizons, which are much less rigid (much less symmetric) than are the more conventional ones (like the MP family). All these, and more, are novelties that were hardly suspected at the time of GR16, in spite of the fact that higher-dimensional black holes had been en vogue for many years, particularly after the developments in string theory in the 1980’s and 1990’s.
In the following I will present a somewhat impressionistic overview of the progress achieved until July 2013. More detailed analyses, including technical descriptions of the solutions and methods, can be found in the Living Reviews in Relativity article [1] and in the book [2]. In an overview as brief as this one it would be out of place to try to credit all the developments made, and the new solutions found, in a field grown so large as this one by now. Thus I refer the interested reader to those monographs for bibliographical details.
2 Preliminaries
2.1 Why higher \(D\)?
My own main motivation for studying General Relativity in \(D>4\) is that by doing so I expect to gain a better understanding of the theory. This is a strategy that is common in theoretical physics: vary the parameters in a theory, even away from the values that seem physically realizable, in order to see how the theory behaves, what features remain unchanged and which new qualitative behaviors appear, whether the theory simplifies in some limits etc. While this motivation may not satisfy those who would like to quickly see whether all these new features are realized in Nature—and ditch the effort if they are not—there is ample historical encouragement for those who want to proceed notwithstanding such objections.
Still, for those who do not find this motivation strong enough, it is possible to argue that String Theory remains our best hope for a unified theory of all interactions, and it does include naturally both gravity and additional dimensions. And even in case that String Theory failed to be this ultimate theory (or the extra dimensions were too small to allow a classical treatment of higher-dimensional gravity), we would still retain one of its most revolutionary spin-offs: the AdS/CFT correspondence, which has taught us to regard GR as a tool for studying strongly-coupled quantum field theories. Quantum systems in, say, realistic dimensions \(D=2,3,4\) can be described and solved using GR in a higher-dimensional spacetime.
I should also mention that much of the initial impetus for the study of higher-dimensional GR came from models (mostly of brane-world type) with Large Extra Dimensions and quantum gravity at the TeV scale. Needless to say, this motivation is dwindling in the face of data from the LHC, so it is just as well that many of us ceased long ago to name (and think of) this as our primary motivation in this subject.
To keep the subject within bounds, I will mostly concentrate on asymptotically flat vacuum black hole solutions, which solve the equations \(R_{\mu \nu }=0\) in higher dimensions. Occasionally I will also discuss solutions with extended horizons, such as black strings and branes (which strictly are not asymptotically flat), and Anti-deSitter black holes which solve \(R_{\mu \nu }=-|\Lambda |g_{\mu \nu }\).
2.2 Black holes galore in \(D>4\): a very brief history
As I mentioned, the early history of hi-D black holes is rather short: in 1963, Tangherlini found the natural higher-dimensional generalization of the Schwarzschild solution, and in 1986 Myers and Perry, with a lot more effort, did the same for the Kerr solution.
Given the four-dimensional precedents, it might have been thought that these solutions exhausted all the possibilities for stationary, asymptotically flat vacuum black holes. In the early 2000s we learned that this is far from being the case. At that time a number of qualitatively new solutions were discovered, notably black rings and inhomogeneous black strings, which made clear that very many new classes of black holes and new phenomena (including in AdS) were possible and ripe for discovery. In the last decade we have seen the realization of many of these hopes.
3 Exact solutions and methods
Before delving into the approximate methods which have become the main source of recent progress, it is worth recalling how far we have been able to get using exact techniques. It has seemed natural to try to extend to \(D\ge 4\) those methods that have been successful in four dimensions, in particular those that allow to systematically obtain the Kerr solution.
In this vein, it is natural to try to generalize the Kerr-Schild ansatz
which effects a kind of linearization of the system. This approach was in fact successfully used by Myers and Perry in their derivation of a family of black hole solutions in any dimension \(D\ge 4\) and with rotation on all possible planes. However, the ansatz has failed to give any other black hole solutions.
Another approach involves inverse-scattering methods, which reduce the task of solving the set of non-linear Einstein equations to an associated linear problem and often boil it down to an algebraic procedure. They have been very well developed in four dimensions in different versions, and the one that has been most fruitfully extended to higher dimensions is the Belinski–Zakharov method. When applied in five dimensions this has yielded many new solutions, including doubly spinning black rings, black Saturns, and multi-ring solutions. However, for the purpose of finding asymptotically flat solutions its utility is reduced to \(D=5\), owing to the large amount of abelian symmetries that it requires.
The idea to restrict to algebraically special solutions was also important in the discovery of the Kerr solution, and thus it is natural to try to extend it to higher dimensions. The higher-dimensional analogue of the Petrov classification has been well developed, but unfortunately it seems to be less powerful than in four dimensions, and this approach has not yielded (yet?) any new black holes.
While it is probably too soon to abandon the search for new exact black hole solutions and new methods to construct them, most of the progress in recent years, and in particular the strongest evidence that there are many more black holes than those found so far in exact form, as well as the means to study them, has come from the development and application of approximation techniques.
4 Approximate solutions and methods: a classification
A rough but useful way to characterize them is as follows:
Analytic methods. These are typically based on a perturbative expansion. The most developed one is the ‘blackfold approach’, which uses ideas from effective field theories.
Semi-analytic methods. Again these are based on perturbative expansions, in particular linearized perturbations of exactly known solutions. These yield eigenvalue problems for linear differential equations, which typically require numerical solution. The numerical methods needed can often be implemented through commercial software (such as Mathematica) and falls under what I call ‘soft’ numerics.
Numerical methods. This is the domain of numerical GR proper, with specifically developed codes: ‘hard’ numerics. They attempt to solve in a non-perturbative way the full non-linear PDEs from the Einstein equations. This is a notoriously difficult probelm, but if the aim is to find stationary solutions, the difficulties of time evolution are absent and one is solving a typically simpler elliptic problem. A number of techniques have been developed and applied in recent times: spectral methods, Newton method, Ricci flow techniques etc. Given my lack of expertise in any of them, I will confine myself to a brief description of highlights in this area.
5 Numerical methods (‘hard’ numerics)
5.1 New solutions
Highlights in the application of these techniques to solve the vacuum equations are the construction of
-
inhomogeneous black strings,
-
black holes localized in Kaluza–Klein circles,
-
a black ring in \(D=6\).
Recently there has been a surge of interest in finding certain classes of solutions in AdS, motivated by the attempt to understand aspects of the CFT dual of Hawking radiation. A first step in this direction was the construction of a black hole localized at the AdS boundary. More recently, there have been ‘black droplet’ solutions where the black hole localized in the boundary is in the presence of a black brane in the bulk—the dual description is as black hole in the presence of a thermal bath, from which it remains thermally isolated—and ‘black funnels’, in which the black brane in the bulk is continuously connected to the horizon at the boundary—in which case the boundary dual view is as a black hole in thermal contact with a surrounding thermal bath, possibly with heat flow between the two systems.
Other interesting numerical work in AdS has been devoted to the construction of ‘hairy’ black holes. Some of these provide a holographic description of a superconductor, and have attracted a huge deal of attention in recent years.
5.2 Pros and cons
Pros: Numerical methods naturally take over when the approximations involved in analytic methods break down. In contrast to the latter, they do no need a small parameter to expand in. Very often, they are the only method available. Moreover, they are also very powerful when it comes to performing a stability analysis of a solution.
Cons: Numerical techniques have little heuristic value for discovering qualitatively new solutions. One needs to have a very good idea of what solution to look for: it is impractical, if not a downright waste of time, to ‘shoot in the dark’. So they usually follow an analytic lead. Another drawback is that they may miss unstable, but still interesting, families of solutions.
6 Effective theory methods (blackfolds)
6.1 Method and new solutions
The so-called ‘blackfold approach’ is based on the idea that black \(p\)-branes may have their worldvolume curved into the shape of some submanifold in spacetime.
A black brane solution in vacuum is very easily found as
When \(p=1\) these are called black strings. For general \(p\) their horizons have the geometry of a sphere (from the Schwarzschild part of the metric) times \(\mathbb {R}^p\). Similar extend objects arising from solutions of non-linear equations are familiar in other areas of physics, e.g., solitons (like monopoles) or Abelian Higgs strings. It is known that their dynamics for deformations of a wavelength much larger than the object’s thickness can be efficiently captured by effective theories, such as the Nambu–Goto theory of strings. Actually, effective theories for the dynamics of black objects are well known: the motion of a black hole can be adequately described using a point-particle theory when the acceleration length-scale or the curvature radius of the background in which it moves, call them \(R\), are much larger than the horizon size \(r_0\). One can indeed prove, by performing an expansion of the Einstein equations in the small parameter \(r_0/R\), that the trajectory of the black hole is governed, to leading order, by the equations
and
where \(m\) is the mass of the black hole, \(a^\mu \) its acceleration, and \(\tau \) the proper time along its trajectory. The first equation is of course the geodesic equation, while the second one, which is rarely mentioned, expresses the conservation of mass (energy) along the trajectory.
The idea is to develop a similar effective theory, not for small black holes, but for thin black branes, with thickness \(r_0\) much smaller than the typical curvature radius or wavelength of deformation away from the flat, static black brane. Instead of the black hole mass \(m\), the black brane can be assigned a stress-energy tensor \(T_{ab}\), with indices along its worldvolume. The Einstein equations for deformations of the black brane can be expanded in \(r_0/R\ll 1\) and one obtains, to leading order, the equations
and
In the first one, \(K_{ab}{}^\mu \) is the extrinsic curvature tensor of the brane worldvolume. This equation, first derived by Carter (though not for black branes), is a generalization for an extended object of the equation of geodesic motion—indeed it reduces to it when \(p=0\).
The second equation contains the worldvolume derivative \(D_a\) and it expresses the conservation of the stress-energy tensor. As such, it can be viewed as describing a theory of hydrodynamics on the worldvolume of the brane. This aspect of black brane dynamics connects directly with developments in recent years in the context of the ‘fluid/gravity correspondence’, initially an offshoot of the AdS/CFT correspondence but now part of a larger framework of fluid-dynamical approaches to the effective dynamics of black objects.
The blackfold approach is based on a perturbative expansion of the Einstein equations, for small \(r_0/R\). At the technical level, the equations are solved via a matched asymptotic expansion: one solves them first in a ‘near zone’, involving distances \(r\ll R\), then on a ‘far zone’, where \(r\gg r_0\), and then the two solutions are matched on a common ‘matching zone’ where \(r_0\ll r\ll R\). In this manner the method allows to construct explicitly the metric of the solution in a perturbative way.
The simplest example of this technique is the construction of black rings in any \(D\ge 5\). One starts from a black string, with horizon \(\mathbb {R}\times S^{D-3}\), and bends it into a circle. In order to satisfy the Eq. (5) one finds that the circular black string must rotate along the direction of the circle, at a specific speed. Physically, this correspond to the rotational centrifugal force necessary to balance the tendency of the circular string to collapse under its onw tension. The equation is actually very easy to solve, being a very simple algebraic equation, and the properties of the resulting black ring, which are also straightforward to obtain, match perfectly with the results that one obtains in \(D=5\) by expanding the known exact black ring to first order in \(r_0/R\), where now \(R\) is the radius of the ring circle.
Further applications have yielded solutions for which no previous example was known. For instance, it has been found that black strings can take the shape not only of circles but also of any spatial isometry \(\zeta \) of the background. In a higher-dimensional spacetime this isometry can be along two independent rotation angles,
and this results into a helical black ring. The construction can be made in any \(D\ge 5\), and the solutions are such that the horizon has only one rotational symmetry, among the \(\lfloor (D-1)/2 \rfloor \) that are possible in \(D\) spacetime dimensions. This is the minimum symmetry that the horizon can have, according to higher-dimensional rigidity theorems.
The blackfold Eqs. (5), (6), can also be reduced to simple algebraic equations for configurations that generalize the above construction of circular black rings to the bending of black \(p\)-branes. For instance, one can easily find that starting from a black 3-brane with horizon \(\mathbb {R}^3\times S^{D-5}\), the \(\mathbb {R}^3\) of the worldvolume can be bent into a round \(S^3\) to form a black hole with horizon \(S^3\times S^{D-5}\). Balance of the brane requires that the \(S^3\) rotates at a particular velocity along the two possible rotation planes that it admits. The construction is easily generalized to obtain solutions with horizons involving any product of odd-spheres (times the ‘small’ sphere of the black brane in directions transverse to the worldvolume),
with \(n=D-p-3\).
6.2 Pros and cons
Pros: These methods have a large heuristic value. They conform to physical intuition, which can give a very good idea of what kind of solutions may or not be possible. In this manner they have easily yielded large classes of qualitatively new solutions. As mentioned, the method is very physically motivated, and treats black holes in much the same footing as many other objects such as monopoles, strings or branes. In addition, it is often very simple to solve the equations analytically: in many non-trivial instances they reduce to algebraic equations, in others to ODEs which can be readily solved with e.g., NDSolve in Mathematica. Further cases involve simple PDEs, but at present these have not been studied in any detail.
Cons: The main limitation comes from the perturbative nature of the method: configurations where the parameter \(r_0/R\) is of order one fall beyond its range of applicability. This includes ‘fat’ black rings and blackfolds. The limitation is important insofar as it does not allow to study the interesting regimes where bifurcations and mergers in solution space occur. Also, as mentioned above, the solution of the equations for configurations that are not highly symmetric (e.g., ellipsoidal worldvolumes instead of round spheres) cannot be found fully analytically and in these cases, where differential equations must be solved numerically, the method should be described as ‘semi-analytic’ (very ‘soft’ numerics).
7 Perturbation methods (zero modes)
7.1 Method and new solutions
A zero mode is a zero-frequency linear perturbation of a known stationary solution. The zero-frequency property means that the perturbation is invariant under the stationary Killing action. In a static black hole solution, a zero mode is a static perturbation. In a rotating black hole, a zero mode is a perturbation that co-rotates with the black hole.
Zero modes allow to construct new solutions since they lead to bifurcations in solution space. One instance is the zero mode perturbation of black strings (the zero mode of the Gregory-Laflamme instability) which indicates a bifurcation into a branch of inhomogeneous black strings. This has also been applied to rotating black holes. It has been proven that there is no zero mode for the four-dimensional (non-extremal) Kerr solution, and no zero modes have been found for the five-dimensional Myers-Perry solutions. However, many zero modes are expected, and several have been already found, for the Myers-Perry black holes in \(D\ge 6\).
Zero modes are typically associated to the onset of instabilities. The reason is simple: a stable perturbation with real frequency \(\omega ^2>0\) which becomes an unstable perturbation with imaginary frequency \(\omega ^2<0\) will, by continuity, pass through a static perturbation with \(\omega ^2=0\).
Zero modes are found by solving linear perturbation equations. One can often make some headway analytically. Ideally, one finds a decoupled master ODE for the perturbations (which depends on a radial coordinate \(r\)); more often, and less ideally, what one obtains is a set of coupled linear PDEs in radial and angular coordinates \((r,\theta )\). These equations are then solved numerically in a computer using ‘soft’ numerical techniques. The solution of the linear PDEs requires rather less ‘soft’ techniques than simply using NDSolve.
The main new solutions that have been found with these methods are deformed rotating black holes, which are axisymmetric deformations of Myers-Perry black holes which can be thought of as having ‘pinched’ horizons. Such pinched black holes have been obtained, with a single rotation, in \(D=6\) to \(11\). They have also been solved for two (out of three possible) rotations in \(D=7\). In \(D=9\), it has been found that black holes with all possible spins turned on, all with equal values—this makes the solution have cohomogeneity one, which means that the perturbations will be ODEs in a radial variable—admit a 70-parameter (!) family of deformations (in contrast, none of these deformations has been found in \(D=5,7\) with equal spins). This is a strikingly large family of solutions, but even larger families are naturally expected in higher odd \(D\).
7.2 Pros and cons
Pros: The method naturally deals, by definition, with bifurcations in solution space, which are important phenomena associated with phase transitions and instabilities. Compared to full non-linear numerical approaches, this method is simpler and allows greater control over the numerical solution. It can also be useful as providing an entry point to ‘hard’ numerical approaches, which are needed if one wants to explore larger (instead of only linearized) deformations which may lead into topology-changing points in solution space.
Cons: A main disadvantage of the approach is that it only goes infinitesimally away from known solutions. This implies that the new solutions have the same horizon topology as the undeformed ones. Furthermore, it is usually difficult to determine in which direction (in solution space) the new branch is heading. Also, as with all approaches in which numerical solution is involved, one loses the large generality of analytical results. For instance, one cannot find solutions that are valid for arbitrary \(D\) but must instead proceed painstakingly case by case.
8 A new method: the large-\(D\) expansion
When a GR problem can be formulated for arbitrary values of \(D\), it seems natural to consider what simplifications one can get by expanding around the limit where \(D\) grows infinitely large, i.e., an expansion in \(1/D\). Recently it has been shown to lead to drastic simplifications, allowing to solve in analytic form problems that previously required numerical solution.
Within the context of this talk, the technique may naturally be applied to the construction of new black hole solutions, but this has not been done yet.
9 Putting it all together: phase diagrams in \(D=5\) and \(D\ge 6\)
As an illustration of the progress that has resulted from the combination of the approaches described above, I will now describe the understanding we have gained of the phase diagram of singly-spinning black holes in \(D=5\) and \(D\ge 6\). At present, it seems likely that the most important qualitative propreties of these phase diagrams have been identified. Let emphasize that at the time of GR16 none of this was even hinted at.
In order to set the stage let me first describe the phase diagram in \(D=4\). In vacuum gravity we can always set the total mass to \(M=1\). The phase diagram can then be taken to represent the horizon area of the black hole as a function of its angular momentum \(J\). In four dimensions the only solutions are the family of Kerr black holes, with spins in the range \(J\le M^2\), terminating at the extremal limit \(J=M^2\), which has a regular horizon (Fig. 1).

Phase diagram of four-dimensional black holes: it contains only the Kerr solution
9.1 Phase diagram in \(D=5\)
Besides the Myers–Perry black hole and the black ring, the inverse-scattering method allows to construct in an exact manner other solutions with a single rotation parameter. This has been done explicitly for the black Saturn and black di-ring, but no obstruction of principle appears for extending the construction to solutions with arbitrarily many black rings. It seems quite possible, although a rigorous mathematical proof is still lacking, that these exhaust all the stationary black holes in \(D=5\) with a single rotation.
Let us metion that when the two possible rotations are turned on (the phase diagram would plot the horizon area of allowed solutions as a function of \((J_1, J_2)\)), the inverse scattering method allows to construct solutions that preserve two unbroken spatial \(U(1)\) isometries. However, as discussed above, we have also identified the existence of helical black rings which preserve only one \(U(1)\). These can also be incorporated into the picture. It is tempting to propose that there are no other families of solutions than all these ones (Fig. 2).

Phase diagram of five-dimensional singly-spinning black holes. All these solutions are known in exact form
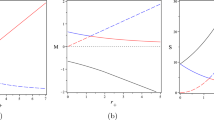
9.2 Phase diagram in \(D=6\)
If the diagram in \(D=5\) already shows a much richer complexity than in \(D=4\), things get still more interesting in \(D\ge 6\). The curve of MP black holes extends to arbitrarily large values of \(J\), for fixed mass \(M=1\)—this is their ‘ultraspinning’ regime. Next come into the picture thin black rings, which have been constructed in the blackfold approach, and zero-mode perturbations that produce a branching-off, from the MP curve, of pinched black holes. It is natural to expect that the branch of black rings will continue until it merges, in a topology-changing point, with the branch of ‘centrally-pinched’ black holes. A hard-numerical construction of black rings in \(D=6\), although it has not been continued until this merger point, appears to be consistent with this possibility. The singular geometry at the topology-changing transition is understood, as it involves critical self-similar behavior.
It is now natural and simple to incorporate, following a similar pattern, branches of black Saturns and multi-rings (which at large \(J\) can be readily constructed as blackfolds) which connect with branches of pinched black holes, with one or several pinches. The whole picture provides a simple and coherent way of putting together all the currently available information, even if many portions of the diagram have not been constructed explicitly and therefore are quantitatively uncertain (Fig. 3).

Phase diagram of \(D\ge 6\) singly-spinning black holes. Only the MP black holes are known in exact form
10 Where do we stand now?
10.1 \(D=5\)
It seems quite possible that in \(D=5\) we are close to having a complete characterization of all stationary, asymptotically flat vacuum black holes: we know what are their main features, qualitatively and often quantitaively, and how the different branches of solutions relate to each other and connect between themselves. We have
-
MP black holes (exact)
-
Planar black rings (exact)
-
Helical black rings (approximate)
-
Combinations of the above into black Saturns, multi-rings etc.
It does not appear too far-fetched that a complete classification will be achieved soon, and the main open problems are (i) a more detailed description (at least qualitatively) of how helical black rings connect to other phases, and (ii) determining the stability of black rings. It is known that ‘fat’ black rings are unstable, and also sufficiently thin black rings are unstable (to a different kind of instability). But it is not known yet whether a window of instability exists in between these two extremes.
10.2 \(D\ge 6\)
For solutions with a single spin in \(D\ge 6\), we seem to have identified the general patterns of the phase diagram. The one qualitative aspect that remains to be determined is whether the branchings and mergers occur as first-order or second-order phase transitions.
Much less is known for black holes with several spins. Some overall patterns are emerging: many new large-\(J\) phases have been uncovered as blackfold constructions, and zero-mode analysis has led to new multi-parameter families of solutions. However, it is very clear that many more phases are still not understood or even identified at all. There is ample room for progress in this direction.
References
Emparan, R., Reall, H.S.: Black holes in higher dimensions. Living Rev. Rel. 11, 6 (2008) [arXiv:0801.3471 [hep-th]]
Horowitz, G.T. (ed.): Black holes in higher dimensions. Cambridge Univ. Press, Cambridge (2012)
Author information
Authors and Affiliations
Corresponding author
Additional information
Work supported by MEC FPA2010-20807-C02-02, AGAUR 2009-SGR-168 and CPAN CSD2007-00042 Consolider-Ingenio 2010.
This article belongs to the Topical Collection: The First Century of General Relativity: GR20/Amaldi10.
Rights and permissions
About this article
Cite this article
Emparan, R. Higher-dimensional black hole solutions: approximate methods. Gen Relativ Gravit 46, 1686 (2014). https://doi.org/10.1007/s10714-014-1686-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10714-014-1686-2