
Abstract
A model for the evaluation of the concentration fluctuation variance is coupled with a one-particle Lagrangian stochastic model and results compared to a wind-tunnel simulation experiment. In this model the concentration variance evolves along the particle trajectories according to the same Langevin equation used for the simulation of the velocity field, and its dissipation is taken into account through a decay term with a finite time scale. Indeed, while the mean concentration is conserved, the concentration variance is not and our model takes into account its dissipation. A simple parametrization for the dissipation time scale is proposed and it is found that it depends linearly on time and on the ratio between the size and the height of the source through a scaling factor of 1 / 3.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Generally, atmospheric dispersion models prescribe the mean concentration field, noting that mean concentration is the key parameter to evaluate air quality for regulatory purposes. However, in a wide range of cases, such as the dispersion of toxic, flammable or chemical reacting gases, evaluating the mean concentration field may not be sufficient and knowledge of the concentration variance is needed.
Lagrangian (single-particle) stochastic models, beginning with the fundamental work of Thomson (1987), have been applied to complex terrain and meteorological conditions (see, for instance, Kaplan and Dinar 1989; Tinarelli et al. 1994). However, these models are not suitable for the simulation of chemical reactions, since they do not provide the second-order moments of the concentration probability density function (p.d.f.). In fact, the concentration fluctuations are needed unless the time scale of chemical reactions is long compared with the time scale of the turbulence, i.e. for a very low Damköhler number (the ratio between the time scales of turbulence and chemical reactions). In this case the turbulent concentration fluctuations are damped and hence do not contribute to the reaction rate (Alessandrini and Ferrero 2009).
It is well-known that the concentration covariances are necessary to reproduce the segregation effect, i.e. the effect of the turbulent mixing, which reduces the reaction rate. When the mixing rate is lower than the reaction rate, the turbulent cascade is unable to bring together the reactants rapidly enough, in which case the turbulence time scale controls the reaction (Sykes et al. 1999). This effect should be considered when the chemical reactions are not in equilibrium and the bulk meandering and the in-plume mixing processes, generated by the turbulent eddies, significantly increase the correlation between the reactants (Vilà-Guerau de Arellano et al. 1995; Galmarini et al. 1997; Yee et al. 2003).
In the last ten years, many models have been developed for the second- or higher-order moments of the concentration p.d.f.. Among these, Thomson (1990) and Borgas and Sawford (1994) proposed the two-particle model, which provides information on the variance of the concentration distribution, but can only be applied in idealized conditions (homogeneous, isotropic and stationary turbulence).
Another approach, the so-called p.d.f. method (Pope 1985; Cassiani et al. 2005) appears promising but, up to now, its application is difficult due to the large amount of computational time required. A simple and effective method for predicting higher concentration moments for the stationary release of contaminant is the fluctuating plume model (Yee et al. 1994; Yee and Wilson 2000; Luhar et al. 2000; Franzese 2003; Mortarini et al. 2009; Ferrero et al. 2013). The basic idea of this approach (Gifford 1959) is that the absolute dispersion can be divided into two independent components: the meandering motion of the centroid and the relative dispersion around it. The meandering plume centroid is usually simulated in a static coordinate system relative to the source; the internal mixing of the plume, i.e. the relative concentration p.d.f., can be parametrized on a relative coordinate system around the centroid as it is locally evaluated. Mortarini et al. (2009) extended the Franzese (2003) approach, applying the fluctuating plume model to the turbulent flow generated in a simulated canopy, while Cassiani and Giostra (2002) proposed a similar model based on a linear compression of the mean concentration p.d.f. that enables the rapid evaluation of the higher-order concentration moments (Bisignano et al. 2014).
In the present study, a single-particle Lagrangian stochastic model has been developed that is able to evaluate the concentration variance field. While the stochastic equations are the classical Thomson (1987) formulation for the single-particle model, which is only able to simulate the mean concentration, the approach proposed by Manor (2014) and used therein allows us to predict also the concentration variance. In fact, the dynamics of the concentration variance is simulated by means of single independent Lagrangian trajectories.
In the model, the source term of the concentration variance is proportional to the mean concentration field. The particles emitted from each source of concentration variance are dispersed in the computational domain solving the same Lagrangian stochastic equation used to calculate the mean concentration field. A quantity of concentration variance is assigned to each particle. Further, as in previous works (see, for instance, Lewellen 1977; Sykes et al. 1984; Galperin 1986; Manor 2014), the dissipation of the concentration variance is simulated with an exponential decay term, whose time scale is parametrized and applied to the particles at each timestep. In order to compare the model with the Fackrell and Robins (1982) experiment a new parametrization for this time scale is proposed.
We stress that the model is a simple single-particle Lagrangian stochastic model, and so the implementation of the proposed methodology is straightforward and does not demand excessive computer time. Furthermore, it can be applied to non-homogeneous turbulence.
The model is described in detail in Sect. 2, where the new parametrization for the dissipation time scale is presented. The numerical results and experimental data are compared in Sect. 3, while in Sect. 4 the main conclusions are summarized.
2 The Model
2.1 The Stochastic Equations
The model is based on the Lagrangian stochastic equations (Thomson 1987) (Langevin equation),
where \(u_{i}\) are the turbulent velocity components, among which that along the wind direction is added to the mean velocity U and \(\text {d}W_{j}(t)\) is an incremental Wiener process with zero mean and variance \(\text {d}t\).
In stationary turbulence Eq. 1 becomes
where the diffusion coefficients, \(b_{ij}(\mathbf{x })\), are equal for the three components and depend only on z,
where \(C_{0}\) is a constant and \(\epsilon (z)\) the mean dissipation rate of the turbulent kinetic energy (TKE). The drift coefficients \(a_i\) are
where \(\sigma _{u_{i}}\) are the velocity components standard deviations and \(T_{\mathrm{L}_{i}}\) are the Lagrangian time scales on the three axes that can be obtained, following Hinze (1975), as
Substituting Eqs. 3 and 4 in Eq. 2 we obtain the Langevin equation for Gaussian non-homogeneous and stationary turbulence,
This equation is used in the model to drive the particles through the turbulent flow and, as proposed by Manor (2014), to drive the concentration variance as well. The Manor (2014) approach considers the concentration variance as a passive tracer whose dispersion can be simulated in a Lagrangian frame by independent trajectories calculated using the Langevin equation. In addition, since the mean concentration is conserved along the particle trajectory, while the concentration variance is not, we seek for a proper concentration variance dissipation term.
We note that the Manor (2014) approach is very simple compared to other models for concentration fluctuations such as the two-particle, p.d.f. and the fluctuating plume models, and less demanding of computer time. It yielded satisfactory results in an urban environment (Manor 2014), and for these reasons we test the model against the Fackrell and Robins (1982) wind-tunnel experiment in order to verify its reliability in such controlled conditions. Furthermore, we seek a new parametrization of the fluctuation dissipation term.
2.2 Source of the Concentration Variance
Manor (2014) suggested that the source of variance can be determined as proportional to the mean concentration gradient,
This choice can be justified looking at the Eulerian steady-state equation for the concentration variance, adopting the K-closure (Sykes et al. 1984; Manor 2014),
where C is mean concentration, \(c^{\prime }{}\) is the concentration fluctuation and \(K^{(v)}_{i}\) is the diffusion coefficient. Here I is the homogeneous transport, II is the turbulent transport, III is the source and IV is the dissipation. It is worth noting that Eq. 8 is an Eulerian equation and is shown here only to show how the source of variance can be determined, but it is not used in the model. Thus the sources of variance depend on the gradients of the mean concentration.
Several Lagrangian models use an Eulerian grid to store the concentrations, e.g. the p.d.f. models (Pope 1985; Cassiani et al. 2005). Hybrid (Lagrangian/Eulerian) models were also developed by Alessandrini and Ferrero (2009) and Kaplan (2014), where the mean concentrations can be either calculated at one time if stationary conditions are assumed, or over the run-time. It should be noted that a fixed grid may not have sufficiently high resolution close to the source, and higher resolution than necessary far from it. However, adaptive grids can be used to better represent the wide range of scales but this is beyond the scope of the present work. It is worth stressing that in a Lagrangian particle model the mean field is always calculated using a spatial mean over several Eulerian grid cells.
2.3 Concentration Variance Dissipation
Once the sources of variance are determined, the Lagrangian Eq. 2 of the turbulent velocities can be used to simulate the dispersion of the concentration variance. However, as already noted, the concentration fluctuations are not conserved along the flow. Hence the dissipation of variance should be modelled. In analogy with the Eulerian Eq. 8 the concentration variance dissipation, to be introduced in the Lagrangian equation in order to determine the decrease of the concentration variance at each timestep, can be evaluated as,
where \(t_\mathrm{d}\) represents a characteristic time scale. The determination of this time scale is the key point in simulating the concentration variance dispersion. A first attempt to predict \(t_\mathrm{d}\) was made by Lewellen (1977) who calculated this parameter through the plume standard deviations. However, Sykes et al. (1984) observed that the variance dissipation is controlled by eddies with length scales of the order of the plume size. They also suggested that, while the outer scale becomes rapidly independent of the source, as also shown by Fackrell and Robins (1982), the total concentration variance depends on the inner scale \(\lambda _\mathrm{c}\). As a matter of fact, the plume can be divided into inner and outer scales. The outer scale corresponds to the scale over which the plume meanders and the inner scale is the relative spread of the plume. As a consequence, Sykes et al. (1984) prescribed an inner scale from which they determined the dissipation time scale \(t_\mathrm{d}\). In particular they showed, as also stated by Sawford (1982), that \(\lambda _\mathrm{c}\) should be initially proportional to the time t and then to \(t^{\frac{3}{2}}\). However, in these works, the time scale is obtained from both the length scale and a velocity scale, and the velocity scale actually depends on the length scale. Galperin (1986) showed that the dissipation time scale grows linearly with time, and if we consider the dissipation time scale as the lifetime of the fluctuations, it should be smaller close to the source where the intense mixing causes rapid development and dissipation of the fluctuations. Thus, we considered the following function,
where \(T_{\mathrm{L}_{w_\mathrm{s}}}^\mathrm{s}\) is the value of the vertical component of the Lagrangian time scale at the source height, \(t_{*}=z_i/U\) (\(z_i\) is the boundary-layer depth and U is the freestream velocity) and \(\alpha _1\), \(\alpha _2\), are two constants; \(d_\mathrm{s}\) is the source diameter, \(h_\mathrm{s}\) is the source height. As \(t \rightarrow 0\), Eq. 10 becomes a constant depending on the Lagrangian time scale and the ratio between source diameter and height. The proportionality between \(t_\mathrm{d}\) and the integral time scale was proposed by Bèguier et al. (1978) and Warhaft and Lumley (1978), and used by Andronopoulos et al. (2002) and Milliez and Carissimo (2008). A similar relationship between \(t_\mathrm{d}\) and the integral scale can be found in Yee et al. (2009). Since the results of the Fackrell and Robins (1982) experiments showed that the concentration variance dispersion depends both on the source size and height, we introduced this dependency in the parametrization for \(t_\mathrm{d}\). The exponent 1/3 was found to give the optimum smoothing to this relation; \(\alpha _1=1.3\) and \(\alpha _2=1.25\) were determined by tuning their values with the experimental data. The parametrization is similar to the expression derived in Appendix of Sykes et al. (1984) except that the source-size ratio has a 1/3 power rather than 2/3. Thus different results might be obtained whether our model or Sykes et al. (1984) model is used. However, we stress that, when changing the power of the exponential in Eq. 10, the comparison with some experiments corresponding to given sources can be better reproduced but may also worsen others.
3 Comparison with Wind-Tunnel Data
We compared the model results obtained using the parametrization given by Eq. 10 with the Fackrell and Robins (1982) wind-tunnel experiment, and simulated both the mean concentration and concentration variance using the Lagrangian model presented in Sect. 2.1. The mean field was determined on an Eulerian grid. The comparison is made in terms of mean and concentration variance vertical profiles, normalized with their maxima, and fluctuation intensity.
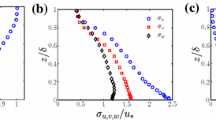
Many authors used the dataset gathered in this experiment to test their models for concentration fluctuations (Sykes et al. 1984; Mortarini and Ferrero 2005; Cassiani et al. 2005; Cassiani 2012; Kaplan 2014). The Fackrell and Robins (1982) wind-tunnel boundary layer was characterized by a height \(H= 1.2\) m, a friction velocity \(u_{*}=0.188\) m s\(^{-1}\), a roughness length \(z_0=2.4 \times 10^{-4}\) m and an asymptotic velocity \(U_e=4\) m s\(^{-1}\). The experiments were carried out with two different source heights: an elevated source at \(h_\mathrm{s}=0.228\) m and a ground-level source. For the ground-level source three different source diameters \(d_\mathrm{s}\) were used (3, 9, 15 mm), while for the elevated source five source sizes were used, viz. \(d_\mathrm{s}=3, 9, 15, 25, 35\) mm. Initial measurements were also performed with \(d_\mathrm{s}= 8.5\) mm. Besides these parameters, the mean flow, U(z), the standard deviation \(\sigma _{u_{i}}(z)\), and the mean TKE dissipation, \(\epsilon (z)\), are required to run the Lagrangian model. An interpolation of the Fackrell and Robins (1982) experimental data provided us with these quantities.

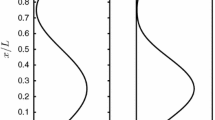
Comparison between simulated (lines) and measured (points) plume mean concentration vertical profiles, normalized with their maxima, for the elevated source and \(d_\mathrm{s}= 8.5\) mm
As explained above, our model uses the mean concentration field to calculate the source term for the concentration variance, hence we first evaluated it with the stochastic Langevin equation, Eq. 6. The results are shown in Fig. 1, where the vertical profiles of the simulated and measured mean concentrations at different distances from the source are compared for the elevated source and \(d_\mathrm{s}= 8.5\) mm. It can be seen that the observed profiles are reproduced well by the model even though a slight underestimation in values can be observed at the largest distances.
Then, after having calculated the mean field on an Eulerian grid, we were able to estimate the sources of variance given by Eq. 7. Given that the sources of variance depend on the gradient of the mean concentration, they may vary when using different grid size. Thus we performed a series of simulations with different space steps in the three directions, and found that changing the grid spacing in the direction along the flow does not result in remarkable differences in the variance concentrations. The model results are sensitive to variations in the grid resolution for the vertical and crossflow directions, since the gradients along these directions are larger. However, for the vertical direction, these variations are smaller for grid spacing \(\le \)0.01 m, which corresponds to 0.0083 when normalized with the boundary-layer height H. The results we present in the following were all obtained with these values: \(\Delta x =0.18\) m (\(\Delta x/H=0.15\)), \(\Delta y =0.04\) m (\(\Delta x/H=0.033\)), \(\Delta z =0.01\) m (\(\Delta x/H=0.0083\)).

Comparison between simulated (lines) and measured (points) plume concentration variance vertical profiles, normalized with their maxima, for the elevated source and \(d_\mathrm{s}= 8.5\) mm
The concentration variance evolution was simulated with the same stochastic equation, Eq. 6, and with the same turbulence parameters used to evaluate the mean concentration field. On each trajectory the concentration variance decay followed Eq. 9. The comparison between simulated and measured normalized concentration variance vertical profiles for the elevated source with \(d_\mathrm{s}= 8.5\) mm is presented in Fig. 2. It can be seen that the agreement is satisfactory for all distances from the source apart from a slight overestimation near the ground at \(x/H=3.83\) and \(x/H=4.79\). However the agreement at the last distance is very good. It can be stressed that, as noted by Fackrell and Robins (1982), the height of the concentration variance maximum increases with the distance from the source. The results confirm the linear dependence of the dissipation time scale on time, proposed by Galperin (1986). The general behaviour of the dissipation rate is captured by the model and, in particular, by the parametrization of the dissipation term. The ability of the model to reproduce the dependence of the concentration variance field on the source size can be tested. It is important to note that the source-size dependence not only enters the model through the mean field, but also through the concentration variance dissipation term (Eq. 10). Figure 3 shows the comparison between the modelled and the measured fluctuation intensity as a function of the normalized distance for the different source diameters and the source height equal to 0.228 m. The fluctuation intensity is defined as the maximum concentration standard deviation over the maximum mean concentration, \(i_\mathrm{c}=\frac{\sqrt{(\overline{c^{\prime ^2}})_{\max }}}{C_{\max }}\).

Comparisons between simulated and measured fluctuation intensity as a function of the normalized distance for the different source diameters. Symbols refer to experimental data lines to model results. Elevated source: \(d_\mathrm{s}= 3\) mm red, \(d_\mathrm{s}= 9\) mm blue, \(d_\mathrm{s}= 15\) mm green, \(d_\mathrm{s}= 25\) mm magenta, \(d_\mathrm{s}= 35\) mm yellow. Ground level source: black, solid lines \(\alpha _1=1.3\), dashed line \(\alpha _1=7\)

Comparison between simulated (lines) and measured (points) plume mean concentration vertical profiles, normalized with their maxima, for the ground level source and \(d_\mathrm{s}= 15\) mm
Generally, the overall agreement is satisfactory. The model results for \(d_\mathrm{s}=3\) mm underestimate the maximum and reproduce correctly the measurements at the furthest distances. In the case of \(d_\mathrm{s}=9\) mm the discrepancy between the calculated and simulated maxima is remarkable, while reducing for \(d_\mathrm{s}=15\) mm. More satisfactory results are found with larger source diameters. It is worth noting that these results are comparable with those obtained by, e.g. Cassiani et al. (2005), Cassiani (2012), Kaplan (2014) using more sophisticated and time-demanding models. It can be seen that the quantities in Figs. 2 and 3 are different since in Fig. 2 the concentration variance is normalized with its maximum, while Fig. 3 represents the fluctuation intensity. Thus, it is not surprising that the good agreement of Fig. 2 profiles does not correspond to a similar behaviour of the 9-mm source experiments in Fig. 3.

Comparison between simulated (lines) and measured (points) plume concentration variance vertical profiles, normalized with their maxima, for the ground-level source and \(d_\mathrm{s}= 15\) mm
As described in Sect. 2.3, the parametrization of the variance dissipation we propose herein depends both on the size and the height of the source. Hereafter we show the results of the simulations performed with the ground-level source (placed 7 mm above the domain bottom). In Fig. 4 the comparison between modelled and experimental mean concentrations, for the case of \(d_\mathrm{s}= 15\) mm, is shown. The agreement can be considered satisfactory at all distances except for the closest one to the source where the model overestimates the experimental data. As for the elevated source case, the concentration mean field of the ground-level source was used to calculate the sources of variance. The concentration variance dispersion was then evaluated through Eqs. 6 and 9. The comparison between simulated and measured normalized concentration variance vertical profiles for the ground-level source with \(d_\mathrm{s}= 15\) mm is presented in Fig. 5. In this case, the agreement is not completely satisfactory as in the case of the elevated source. Only at \(x/H=5\) do the simulated profiles reproduce the measurements well, while closer to the sources values are overestimated, near the ground. This can be partially due to the Lagrangian model and the boundary conditions (perfect reflection), since the mean concentrations are not perfectly reproduced close to the source. As a matter of fact, in this case the particles are emitted at a very small distance from the bottom, thus generating an asymmetric source shape. However, the poor results for the concentration variance profiles at the two first distances might indicate a numerical limit of the method that calculates the sources of variances as proportional to the mean concentration gradient. This estimation may be imprecise when very large gradients are calculated and the model resolution can be inadequate for the purpose. It can be noted that the experimental points in Fig. 5 are the same in all panels. As a matter of fact, Fackrell and Robins (1982) observed that the different profiles collapse onto a unique curve in the case of the ground-level source. In Fig. 3 the fluctuation intensity as a function of the normalized distance for the different source diameters is depicted also for ground-level source. While the results are satisfactory for the elevated source, even with some limitation, in the case of the ground-level source the model underestimates. In this case improved results are obtained by modifying \(\alpha _1=7\) in Eq. 10. This last result is similar to that of Galperin (1986) who used two different constants in the parametrization of the dissipation length scale for the elevated and ground-level sources respectively.
4 Conclusion
A model for the concentration fluctuations is proposed using the Lagrangian single-particle stochastic model for the concentration variance developed by Manor (2014). The model calculates the sources of concentration variance from the previously simulated mean field, after which the particles emitted from these sources are dispersed in the flow using the Langevin equation for single-particle trajectories, which is the same as that used for simulating the mean concentration. A value of the concentration variance is assigned to each particle, and depends on the source strength and the number of particles emitted. However, unlike the mean concentration that is conserved, the variance is dissipated along the trajectories and an appropriated parametrization for the dissipation term has to be considered. In analogy with the Eulerian diffusion equation for the concentration variance, this dissipation term is given by the ratio between the variance itself and a dissipation time scale that is to be parametrized. While Manor (2014) suggested that the dissipation may be proportional to the Lagrangian time scale using an ad hoc coefficient, we present a different parametrization scheme, which depends on the Lagrangian time scale and grows linearly with time, as suggested by Galperin (1986). Furthermore, following Fackrell and Robins (1982) and Sykes et al. (1984), we require that the dissipation time scale should also depend on both the size and the height of the source. In order to assess its reliability we applied the model to the Fackrell and Robins (1982) wind-tunnel experiment reproducing the dispersion from sources of different sizes and heights. The fluctuation variance production term is based on the K-theory that could be a rough approximation for short time dispersion. The poor results for the vertical profiles near the ground-level source demonstrate this incorrectness. On the other hand the furthest profiles show a better agreement between simulation results and measurements confirming that the turbulent flux can only be represented by K-closure at large time. The results regarding the elevated source seem to suggest that the K-hypothesis also applies for small times in this case. This could be due to the larger eddy involved in the mixing process far from the ground. The results show that the model can reproduce the Fackrell and Robins (1982) experiments, at least as far as the elevated sources are considered. While to simulate the ground-level source experiments the value of the constant \(\alpha _1\) should be modified. The model results also demonstrate that it can be applied in some situations in which the hypothesis we have made are valid (farthest distances, elevated sources) while it should be less trusted when very short times and ground-level sources are accounted for. In these cases more sophisticated choices should be made to ensure the correctness of the model and the accuracy of the results. However, there are many real cases in which this model could be applied.
References
Alessandrini S, Ferrero E (2009) A hybrid Lagrangian–Eulerian particle model for reacting pollutant dispersion in non-homogeneous non-isotropic turbulence. Physica A Stat Mech Appl 388:1375–1387
Andronopoulos S, Grigoriadis D, Robins A, Venetsanos A, Rafailidis S, Bartzis JG (2002) Three-dimensional modeling of concentration fluctuations in complicated geometry. Environ Fluid Mech 1:415–440
Bèguier C, Dekeyser I, Launder BE (1978) Ratio of scalar and velocity dissipation time scales in shear flow turbulence. Phys Fluids 21:307–310
Bisignano A, Mortarini L, Ferrero E, Alessandrini S (2014) Analytical offline approach for concentration fluctuations and higher order concentration moments. Int J Environ Pollut 55:58–66
Borgas MS, Sawford BL (1994) A family of stochastic models for particle dispersion in isotropic homogeneous stationary turbulence. J Fluid Mech 279:69–99
Cassiani M (2012) The volumetric particle approach for concentration fluctuations and chemical reactions in Lagrangian particle and particle-grid models. Boundary-Layer Meteorol 146:207–233
Cassiani M, Giostra U (2002) A simple and fast model to compute concentration moments in a convective boundary layer. Atmos Environ 36:4717–4724
Cassiani M, Franzese P, Giostra U (2005) A pdf micromixing model of dispersion for atmospheric flow. Part I: development of the model, application to homogeneous turbulence and to neutral boundary layer. Atmos Environ 39:1457–1469
Fackrell JE, Robins AG (1982) Concentration fluctuations and fluxes in plumes from point sources in a turbulent boundary. J Fluid Mech 117:1–26
Ferrero E, Mortarini L, Alessandrini S, Lacagnina C (2013) Application of a bivariate gamma distribution for a chemically reacting plume in the atmosphere. Bound-Layer Meteorol 147(1):123–137
Franzese P (2003) Lagrangian stochastic modeling of a fluctuating plume in the convective boundary layer. Atmos Environ 37:1691–1701
Galmarini S, Vilà-Guerau de Arellano J, Duynkerke P (1997) Scaling the turbulent transport of chemically reactive species in a neutral and stratified surface-layer. Q J R Meteorol Soc 123:223–242
Galperin B (1986) A modified turbulence energy model for diffusion from elevated and ground point sources in neutral boundary layer. Bound-Layer Meteorol 37:245–262
Gifford F (1959) Statistical properties of a fluctuating plume dispersion model. Adv Geophys 6:117–137
Hinze J (1975) Turbulence. McGraw-Hill, New York
Kaplan H (2014) An estimation of a passive scalar variances using a one-particle Lagrangian transport and diffusion model. Physica A Stat Mech Appl 393:1–9
Kaplan H, Dinar N (1989) Diffusion of an instantaneous cluster of particles in homogeneous turbulence field. J Fluid Mech 203:273–287
Lewellen WS (1977) Use of invariant modelling. In: Handbook of turbulence, vol 180. Plenum Press, New York
Luhar A, Hibberd M, Borgas M (2000) A skewed meandering-plume model for concentration statistics in the convective boundary layer. Atmos Environ 34:3599–3616
Manor A (2014) A stochastic single particle lagrangian model for the concentration fluctuation in a plume dispersing inside an urban canopy. Boundary-Layer Meteorol 150:327–340
Milliez M, Carissimo B (2008) Computational fluid dynamical modeling of concentration fluctuations in an idealized urban area. Boundary-Layer Meteorol 127:241–259
Mortarini L, Ferrero E (2005) A Lagrangian stochastic model for the concentration fluctuations. Atmos Chem Phys 5:1–10
Mortarini L, Franzese P, Ferrero E (2009) A fluctuating plume model for concentration fluctuations in a plant canopy. Atmos Environ 43:921–927
Pope S (1985) Pdf methods for turbulent reactive flows. Prog Energy Combust Sci 11:119–192
Sawford BL (1982) Comparison of some different approximations in the statistical theory of relative dispersion. Q J R Meteorol Soc 108:191–208
Sykes RI, Lewellen WS, Parker SE (1984) A turbulent-transport model for concentration fluctuations and fluxes. J Fluid Mech 139:193–218
Sykes RI, Parkera SF, Henna DS, Lewellenb WS (1999) Turbulent mixing with chemical reaction in the planetary boundary layer. J Appl Meteorol Climatol 33:829–834
Thomson D (1987) Criteria for the selection of stochastic models of particle trajectories in turbulent flows. J Fluid Mech 180:529–556
Thomson DJ (1990) A stochastic model for the motion of particle pairs in isotropic high-Reynolds-number turbulence, and its application to the problem of concentration variance. J Fluid Mech 210:113–153
Tinarelli G, Anfossi D, Brusasca G, Ferrero E, Giostra U, Morselli MG, Moussafir J, Tampieri F, Trombetti F (1994) Lagrangian particle simulation of tracer dispersion in the lee of a schematic twodimensional hill. J Appl Meteorol 33:744–756
Vilà-Guerau de Arellano J, Duynkerke P, Zeller K (1995) Atmospheric surface layer similarity theory applied to chemically reactive species. J Geophys Res 100:1397–1408
Warhaft Z, Lumley JL (1978) An experimental study of the decay of temperature fluctuations in grid-generated turbulence. J Fluid Mech 88:659–684
Yee E, Wilson DJ (2000) A comparison of the detailed structure in dispersing tracer plumes measured in grid-generated turbulence with a meandering plume model incorporating internal fluctuations. Boundary-Layer Meteorol 94:253–296
Yee E, Chan R, Kosteniuk PR, Chandler GM, Biltoft CA, Bowers JF (1994) Incorporation of internal fluctuations in a meandering plume model of concentration fluctuations. Boundary-Layer Meteorol 67:11–38
Yee E, Gailis R, Wilson D (2003) The interference of higher-order statistics of the concentration field produced by two point sources according to a generalized fluctuating plume model. Boundary-Layer Meteorol 106(2):297–348
Yee E, Wang BC, Lien FS (2009) Probabilistic model for concentration fluctuations in compact-source plumes in an urban environment. Boundary-Layer Meteorol 130:169–208
Acknowledgements
We acknowledge the CINECA award under the ISCRA initiative, for the availability of high performance computing resources and support. HPCEFM16—High Performance Computing for Environmental Fluid Mechanics 2016 (Italian National HPC Research Project); instrumental funding based on competitive calls (ISCRA-C project at CINECA, Italy); 2016; Amicarelli A. (P.I.), G. Agate, G. Curci, S. Falasca, E. Ferrero, A. Bisignano, G. Leuzzi, P. Monti, F. Catalano, S. Sibilla, E. Persi, G. Petaccia.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ferrero, E., Mortarini, L. & Purghè, F. A Simple Parametrization for the Concentration Variance Dissipation in a Lagrangian Single-Particle Model. Boundary-Layer Meteorol 163, 91–101 (2017). https://doi.org/10.1007/s10546-016-0218-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10546-016-0218-x