
Abstract
Conventional concrete frames are designed to dissipate the earthquake energy through inelastic deformation of the structural elements. It leads to hefty repairment costs and prolonged down time after earthquakes. Self-centering concrete frames (SCCF) have been introduced to minimize the unrecoverable structural damages and post-earthquake repairment costs. SCCF exhibits predictable yield mechanism and self-centering capacity. This paper presents an energy-based seismic design (EBSD) procedure for SCCFs. Based on a proposed damage model, hysteretic energy demand, EH, is introduced as a key design parameter. The desired damage state and structural deformations can be considered in design process. EBSD allows designers to select various performance objectives at different seismic intensities. A prototype building is designed using the proposed EBSD procedure. The performance of SCCF designed using EBSD is compared with the same prototype structure designed using direct displacement-based design method (DDBD). The results show that SCCF has high performance with low residual drift. The performance of the EBSD designed SCCF exhibits more controlled damage compared with the DDBD designed SCCF.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
It has been observed in recent earthquakes that conventional systems can be designed to avoid collapse from strong earthquake shaking through inelastic deformations in structural members. Such yield mechanism results in hefty repairment costs and prolonged down time. To improve the structural performance and post-earthquake repairability, self-centering structures and components have been conceived. Critical components equipped with post-tensioned (PT) tendons and energy-dissipation devices have been proposed to enhance the structural performance of existing structures. (Barbagallo et al. 2020; Wang et al. 2020, 2021; Cai et al. 2021; Xue et al. 2021; Wu et al. 2021;). Meanwhile, self-centering moment frame structures have been developed (Priestley et al. 1993; Cheok et al. 1994; EL-Sheikh et al. 1999; El-Sheikh et al. 2000; Korkmaz et al. 2005) to upgrade aseismic performance of conventional frames. These systems exhibit excellent performance, where the structures can be functional immediately or shortly after strong earthquake shaking. The self-centering concrete frame (SCCF) originally proposed by Priestley and Tao (1993) is one such system. SCCF uses PT tendons and yielding components at the beam-column connections to dissipate earthquake energy and provide the self-centering mechanism. SCCF is commonly designed using the direct displacement-based design (DDBD) method (Priestley et al. 2002). DDBD focuses on the use of maximum deformation as the main design parameter to satisfy the strength and deformation requirements. Unlike conventional concrete frames, SCCF is more sensitive to the cumulative effect and residual deformation (Zhou et al. 2020a). Hence, it is more rational to utilize an energy-based design approach for SCCF structures.
Energy-balance concept was first introduced by Housner in the first world conference on earthquake engineering (Housner et al. 1959). The input energy from earthquakes, EI, is mainly dissipated through damping energy, ED, and hysteresis energy, EH. While the remaining energy is stored in the system as kinetic energy EK and elastic strain energy Es. Equation (1). shows the energy-balance concept (Uang et al. 1990).
Many researchers have proposed energy-based design methods for different structural systems. Akiyama (1985) illustrated a systematic design procedure based on the energy-balance concept, and it has been implemented in a technological standard for earthquake-resistant calculation method in Japan since 2005 (2005). Fajfar et al. (1996) proposed the N2 method and modified Park-Ang model for the design and performance evaluation for conventional concrete frames. Akbas et al. (2001) conducted statistical analyses to study energy input and dissipation. Since the study was performed based on small sample set and a linear distribution of energy dissipation along structural heights was adopted, energy features could not be evaluated precisely. Chou et al. (2003) studied the distribution of EH via multi-pushover analyses (MPA) method and proposed an energy-based design approach. It has been proved that the seismic energy is not only related to structural features, but also ground motion characteristics, including peak values, frequency and duration (Zhou et al. 2019a). Since the MPA method is a static methodology for structure analyses, it cannot accurately capture the real structural behaviors and responses under seismic actions. Thus, the applicability of MPA still remains to be discussed. Meanwhile, Yang et al. (2018; 2020) proposed an equivalent energy design procedure, which allows designers to select various performance objectives for different seismic intensities. It enables structures achieve desired strength and deformation without iterations in the design procedure.
Since the energy-based design procedure specific to self-centering concrete frame structures is still limited, an energy-based design method to routinely design SCCFs is needed. Several specific subjects, including the energy spectra, the damage evaluation and the energy distribution within SCCFs have been investigated in previous researches (Zhou et al. 2020a, b; Song et al. 2021). In this paper, a newly conceived energy-based seismic design (EBSD) procedure for SCCF structures is presented. Based on the proposed damage model, the hysteretic energy demand EH is introduced as a key design parameter for SCCFs. The proposed design procedure considers not only the deformation and energy demands of SCCFs, but also the desired damage states, which would limit the damage development in the well-designed structures. In addition, it allows designers to select various performance objectives for different seismic intensities satisfying with multiple performance levels.
2 Energy-based seismic design procedure
The first step of the proposed EBSD is to determine the EI and EH for the whole structure from the design energy spectra. The second step of EBSD is to quantify the hysteretic energy demand for the critical components EHi. Then, EHi is converted as a key design index. The last step of EBSD is to select the critical design parameters, including the maximum deformation θm, the recoverable deformation θr, the ultimate deformation θu and damage index DI, to achieve multi-performance objectives.
2.1 Energy-dissipation mechanism for SCCF
Figure 1 shows the yield mechanism of SCCF with typical beam-column joints, known as hybrid joints (Cheok et al. 1993; ACI 2003). The hybrid joint has: (a) equal moment strength for top and bottom energy-dissipating mild steels; (b) unbonded PT tendons that connected the beams to the columns through the centroid of the beam. NIST program (Cheok et al. 1993) showed that a well-designed hybrid joint has sufficient strength, stiffness and energy-dissipation capacities, while exhibiting great self-centering behaviors under cyclic loads. The nonlinearity occurred in mild steels can dissipate seismic energy to protect critical components from sever damages. This leads to stable and controllable damage development.

Yielding mechanism of SCCF
2.2 Quantification of E H
The quantification of energy demands includes determining EH and its distribution within structures. Normally, the energy demand for different systems can be derived from input energy spectra and hysteretic energy spectra (Zhou et al. 2019a, b). It has been demonstrated that both the ground motion types and structural features have great effects on EI (Decanini et al. 1998; Chou et al. 2000; Cruz et al. 2000), while the hysteretic model should be considered in determining EH (Zhou et al. 2019b). Therefore, the applicability of existing energy spectra needs to be considered in the quantification of EI and EH for SCCFs. Meanwhile, for implementing the design method into component level, quantification of the energy demands for critical components EHi are needed after determining EH for the whole system.
2.2.1 Energy spectra
Zhou et al. (2020b) proposed a practical design energy spectrum for self-centering systems. The proposed energy spectra are applicable to different site class stipulated in the Chinese code (2016) and can consider the influences of ground motion types and structural characteristics.
Equivalent velocity, Ve, as shown in Eq. (2), is adopted as the input energy per unit mass of structures (Zhou et al. 2020b):
where m represents the mass of the system.
Figure 2 shows the flag-shaped hysteretic model adopted in the study to model seismic responses of self-centering systems (Zhou et al. 2020b). My and θy represent the yield strength and deformation, respectively. K represents the initial stiffness, α represents the post-yield stiffness ratio, η represents the ratio of the yield strength. θu represents the maximum deformation. The ductility factor μ, which defined as θu/θy, was adopted to define the nonlinear behaviors of systems and to construct the constant-ductility spectra.

Flag-shaped hysteretic model
In order to predict Ve of different systems, a benchmark model with η = 0.4, ξ = 0.02, μ = 2 and α = 0.2 is adopted in the study, where ξ is the damping ratio. Design spectrum of the benchmark model is denoted as Vebenchmark. The design spectrum of target systems with different η, ξ, μ and α can be constructed based on Vebenchmark. The proposed design spectra are divided into three portions as a function of the vibration period. Figure 3 illustrates the construction of design spectrum for the benchmark model (Zhou et al. 2020b).

Construction of design spectra for Vebenchmark
Where Vebenchmark, max is the peak value of the design spectrum; T1, T2 are characteristic periods related to ground motion types; γ is the fitting parameter.
It has been demonstrated that input energy spectra closely relate to ground motion features (Zhou et al. 2019a; Zhou et al. 2020b). According to the Chinese code (2016), ground motions are divided into 12 types according to site types (I ~ IV) and design groups (1 ~ 3). Site types are classified based on the shear wave velocity of soil, while design groups are defined by characteristic period. Detailed information can be obtained from the code (2016). Figure 4 illustrates Vebenchmark corresponding to different site types and design groups constructed according to Fig. 3 (Zhou et al. 2020b).

Design spectra for Vebenchmark
Figure 5 illustrates the design input energy spectrum for self-centering systems with different structural features and seismic intensities. It is constructed based on the Vebenchmark presented in Figs. 3 and 4. τ, ρ, φ and λ are the corresponding correction factors related to structural features. detailed information of τ, ρ, φ and λ can be derived from the reference (Zhou et al. 2020b). Results showed that the proposed procedure can reasonably predict the input energy for self-centering systems (Zhou et al. 2020b). EI of the system can be derived from Eq. (2).

Design Ve spectrum
As for EH, Zhou et al. (2020b) proposed EH/EI spectra to determine the hysteretic energy demand EH for self-centering systems. Equation (3) gives the method to calculate the target EH / EI spectrum. The results show that the proposed EH / EI spectrum can give a reliable estimation of EH / EI for self-centering systems. EH of the target system can be derived from the EH / EI spectrum. Detailed information can be obtained from the reference.
2.2.2 Distribution of E H in structures
Many theoretical and numerical studies have been conducted to quantify energy distribution in conventional systems (Bojorquez et al. 2008; Lopez-Barraza et al. 2016; Du et al. 2019; Tu et al. 2018). Song et al. (2021) evaluated the distribution of EH in self-centering frame structures with various structural features and heights. Empirical equations were established to quantify the hysteretic energy demands for hybrid joints, as shown in Eq. (4) and Table 1.
where EHi, joint is the hysteretic energy demand of hybrid joints at the i-th floor; EH, joint_all is the energy demand of all hybrid joints; Hi/H is the height of each floor normalized by the total height of the structure; n is the total number of the floor. Meanwhile, the results showed that self-centering parameter λ has non-negligible effects on EHi, joint when PGA ≤ 0.2 g, especially EHi, joint of the top floor, denoted as EHn, joint. A modified method was suggested to estimate EHn, joint / EH, joint_all considering λ, as shown in Eq. (5) and Table 2. It has been demonstrated that the proposed approaches can be adopted to quantify the distribution of EH within SCCFs appropriately (Song et al. 2021).
It should be noted that NZS3101:2006 (2006) uses self-centering parameter λ to consider relations between the self-centering property and the energy-dissipation capacity. It is defined as the ratio of resisting moment attributed from PT tendons MPT to that of mild steels MS, as:
Normally, λ = 1 ~ 2 is adopted as a key index to design the basic relation between self-centering and energy-dissipation capacities for SCCFs (Pampanin et al. 2010). However, as discussed in Sect. 2.2.1 and Fig. 3, η is defined as the ratio of the yield strength to represent the energy-dissipation capacity in the proposed energy spectra, which can be obtained from Eq. (7a) (Pampanin et al. 2010). In order to switch λ and η in design procedures, the relation of λ with η can be given based on Eq. (6) and Eq. (7a) as:
2.3 Conversion of the hysteretic energy demand as a design parameter
In order to consider the effect of the hysteretic energy demand on the structural performance and the damage development, it needs to be converted as a design parameter in EBSD. Zhou et al. (2020a) proposed a damage model composing of structural deformations and the hysteretic energy demand of hybrid joints EHjoint to quantify the damage development in hybrid joints, as shown in Eq. (8).
where EHjoint represents the hysteretic energy demand of hybrid joints under cyclic loads; θm and θr are the maximum and recoverable deformation, respectively; θu represents the ultimate deformation under monotonic loads; My represents the design moment for hybrid joints, which generally corresponds to the state when PT tendons yield; β represents a non-negative factor related to energy-dissipation capacity; θc = θm—θr represents the residual deformation of the structure. Equation (9) can be used to quantify θu for hybrid joints (El-Sheikh et al.2000).
where εcc represents the ultimate strain of the confined concrete; c represents the compression height of the beam; Lcr represents the length of the plastic hinge developed along the beam; β′ is the coefficient corresponding to the concrete compression height; and b″ is the width of the confined concrete.
Equation (8) can be re-written as:
It can be seen that Eq. (10) converts EHjoint as a design parameter by relating My with EHjoint and the deformation responses. Meanwhile, the structural damage state under certain seismic intensities can also be considered by selecting desired damage index DI.
As discussed in the reference (Zhou et al. 2020a), β closely relates to structural features and has great effects on the damage evaluation. Zhou et al. (2020a) proposed Eq. (11) to determine β for hybrid joints.
where ρv represents the stirrup reinforcement ratio at beam ends, fc represents the concrete strength.
2.4 Determination of critical design parameters
To achieve multi-performance objectives, DI, θm, θr, and θc in Eq. (10) need to be quantified corresponding to different requirements. Zhou et al. (2020a) investigated the damage development and suggested damage intervals for hybrid joints, as shown in Table 3. Compared with damage intervals presented by Park–Ang for conventional concrete structures (Park et al. 1985), the damage limits corresponding to different damage states are extended, implying the superiorities in the performance improvement and damage control of self-centering systems (Zhou et al. 2020a). Meanwhile, it has been demonstrated that well-designed hybrid joints can limit structural damages within the joint and prevent other critical components from severe damages.
According to Eq. (10), smaller DI indicates less damages in the hybrid joints, which results in bigger My. Designers are free to choose a DI for desired damage states under target seismic intensity.
The damage development and behaviors of 29 hybrid joints under cyclic loads were analyzed to investigate deformation indexes (Zhou et al. 2020a). The results showed that θc under minor damage states were all less than 0.1%, while θm corresponding to a minor earthquake was suggested based on the Chinese building code (2016) (Zhou et al. 2020a). According to the study, θc = 0.2% was adopted for DBE to ensure the minor damage state and structural integrity (Zhou et al. 2020a). Meanwhile, ACI T1.2–03 recommend θm = 3.5% to ensure the stability of force transferring under MCE (ACI 2003). In addition, to satisfy with the repairable performance objective for MCE, θc = 0.4% was adopted to control the damage developed in structures. Zhou et al. (2020a) suggested the damage-based deformation indexes for hybrid joints, as listed in Table 4, where DBE represents the design-based earthquake, MCE represents the maximum considered earthquake. Detailed information can be derived from the reference (Zhou et al. 2020a).
Although θm, θc are suggested in Table 4, designers can select other values for various performance objectives based on reliable analyses.
2.5 Determination of design rotations for hybrid joints
Story drift θi is normally adopted as the design index, which is different from rotations of hybrid joints θn. In this case, θn need to be converted from story drifts θi in the design procedure. The method elaborated in PRESSS Design Handbook (2010) is adopted in this paper to obtain rotations for hybrid joints.
A normalized nonlinear mode deformation δi is adopted to elaborate the deformed shape at the peak displacement response (Pampanin et al. 2010). For frames higher than four floors, an inelastic mode deformation is defined by Priestley et al. (2002), as shown in Eq. (12).
The target displacement at the i-th floor can be given as:
where δc is the normalized displacement of the first floor obtained from Eq. (12); Δc is the displacement of the first floor.
According to the design handbook (2010), the story drift θi can be divided as the sum of the yielding drift θy and the beam rotation θp. Priestley has noted that for frames utilizing unbonded post-tensioned tendons (Priestley 2002), θy can be obtained as:
where Lb and hb are the length and height of beams.
Therefore, the rotation of the hybrid joint θn can be derived from the following equation (Pampanin et al. 2010):
where hc is the height of column sections.
Figure 6 presents the flow chart of the EBSD procedure for SCCF proposed in this paper. The procedure has three steps: determination of design parameters, capacity design for critical components and evaluation of structural performance. It allows designers to select different performance objectives based on desired damage states and deformation responses at target seismic intensities.

Flow chart for EBSD
3 Application of EBSD
To demonstrate the applicability of EBSD, the concrete building presented in the PRESSS Design Handbook (2010) is adopted as the prototype building. A five-story SCCF and an eight-story SCCF are designed using both the EBSD and DDBD procedures under different hazard levels. Seismic performances of the design examples are compared by nonlinear dynamic analyses.
3.1 Prototype building
The prototype building is assumed to be located in areas where the Site Class is classified as II according to the Chinese building code (2016). The characteristic period Tg = 0.4 s. Figure 7a shows the plan view of the prototype building. The building includes two types of seismic force resisting systems: SCCF in the East–West direction and self-centering shear walls in the North–South direction. In this paper, only the SCCF in the East–West direction is designed and examined. The elevation view of the frame is presented in Fig. 7b. Dimensions of beams and columns are 400 mm × 650 mm and 700 mm × 700 mm for both EBSD and DDBD designed structures.

Geometry of the prototype building
In order to validate the applicability of the proposed design procedure, different hazard levels are adopted for different design examples. The five-story SCCF is designed assuming the seismic fortification intensity equaling to 7 degree according to the Chinese building code (2016), while that of the eight-story SCCF is 8 degree. It should be noted that all material and dimension information are the same for both the five-story and eight-story design examples.
Table 5 lists the material properties of the prototype building. They are adopted for both EBSD and DDBD designed structures.
In this paper, the inter-story drift limit is selected as 2% for both design examples in EBSD and DDBD design procedures. λ is chosen as 2 to ensure a full re-centering capacity for the system. Design deformations of two SCCFs are given in Tables 6 and 7. They are adopted in both the EBSD and DDBD procedures. Design rotations of hybrid joints θn at each floor are summarized in Tables 6 and 7. Δi is calculated according to Eq. (12) and Eq. (13). θn is calculated based on Eq. (14) and Eq. (15).
3.2 Structure design
3.2.1 Determination of design parameters
According to Sect. 2 and Fig. 1, the design energy spectrum needs to be determined first. As discussed in Sect. 2.2, the ductility factor μ is adopted for defining nonlinear behaviors of systems and constructing constant-ductility spectra. Priestley (1999) noted that for jointed precast systems, superior ductility can be guaranteed compared with traditional concrete systems. An allowable limit of μ = 6 can be selected for frame structures. For both design examples, θy = 0.51% and θu = 3.4% can be calculated according to Eq. (14), Eq. (15) and Eq. (9). The resultant μ = 6.67. Hence, μ = 6 is adopted to construct energy spectra for both design examples in this case. According to Eq. (7), η = 0.67.
Based on the calculated structural features and the proposed design energy spectra shown in Fig. 5 and Eq. (3), key parameters of the target energy spectra for both the examples are summarized in Table 8. Design energy spectra can be obtained according to procedures elaborated in Sect. 2.2.1. Figure 8 present the design energy spectra for both the five-story and eight-story SCCFs.

Design energy spectra
Table 9 lists the main energy indexes of the two design examples.
As discussed in Sect. 2.2, results of EHi, joint / EH, joint_all for both the five-story and eight-story design examples are listed in Tables 10 and 11. In this paper, the maximum of EHi, joint/EH, joint_all is adopted for hybrid joints at each floor to conservatively design the structure. Thus EHi, joint/EH, joint_all = 0.261 and EHi, joint/EH, joint_all = 0.171 are adopted for the two design examples, respectively. It has been demonstrated that for self-centering frames, the energy demand can be equally distributed among hybrid joints at the same floor (Song et al. 2021). Since there are a total of eight joints per floor, the energy demand is about 1/8 of all joints at the same floor. Thus, the energy demand of each hybrid joint is EHjoint = 72 KN·m in the five-story SCCF, while EHjoint = 109 KN·m in the eight-story SCCF.
According to Tables 3 and 4, DI = 0.5 and θc = 0.4% are selected to limit the damage development for the repairable requirement after seismic actions in both design examples. The recoverable deformation θr = 0.834%.
3.2.2 Capacity design for critical components
Based on Eq. (10), the design moment of hybrid joints can be calculated. Table 12 lists design moments of both design examples using EBSD and DDBD procedures (Priestley 2002).
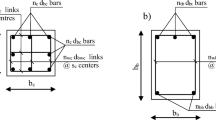
Reinforcement design for hybrid joints is performed according to NZS3101 Appendix B (2006). Detailed reinforcement information for all design examples is presented in Table 13.
Mhybrid—θ responses for a typical hybrid joint can be derived from that contributed by PT tendons MPT and mild steels MS. Four performance points, including decompression, MS yield, PT yield and ultimate limit, can be calculated based on reinforcement properties listed in Table 13. The procedure elaborated in the PRESSS Design Handbook (2010) is adopted to calculate corresponding Mhybrid, MPT and MS. Table 14 and Fig. 9 summarize the moment-rotation co-ordinates of the EBSD and DDBD designed hybrid joints for the two design examples. It can be seen from the table that the EBSD designed structures require higher design moments than that of the DDBD designed structures. Since the cumulative effect is considered in the EBSD, bigger design strength shall be needed in the EBSD designed structures to limit damages developed in structures.

Moment-rotation co-ordinates for hybrid joints
4 Evaluation of seismic performance
4.1 Numerical modeling
Figure 10 shows the modeling of the hybrid joint developed in OpenSees (2000). The hybrid model was developed using zero-length spring element. ElasticMultilinear material in OpenSees was selected to simulate MPT—θ responses. Steel02 material is adopted to model MS—θ responses. The hysteretic behavior of hybrid joints can be obtained by combining two materials with parallel command.

Numerical model for hybrid joints in OpenSees
A displacement-based fiber element is used to model the column. The length of the element, where the plastic hinge formed during earthquakes Lcr, can be calculated according to Eq. (9). Behaviors of mild steels are modeled by Steel02 with CorotTruss elements. Since mild steels are debonded for a length through the lower part of columns, rigid links are used to model relative relations between columns and mild steels. Rayleigh damping model is utilized based on 5% of critical damping ratio to the first and third modes of models. Table 15 shows the first three modal period of the EBSD and DDBD designed structures.
The columns and beams are capacity designed to remain elastic, while all the nonlinearities are concentrated at the joint zones and at the base of columns at the first floor. Therefore, only nonlinearities of the joints and column based are modeled, while beams and columns are constructed with elastic elements. Post-processing has been performed to guarantee these elements remain elastic after seismic actions.
The experimental data of M-P-Z4 and O-P-Z4 specimens obtained from the NIST program (Cheok et al. 1993) are adopted to validate the modeling approaches discussed above. Four mild steels were installed in M-P-Z4 specimen, while O-P-Z4 specimen had six mild steels. Detailed information of specimens can be obtained from the reference (Cheok et al. 1993). Figures 11 and 12 present the moment—rotation curves of the tested hybrid joints from the experimental data and numerical results. It shows that the strength, stiffness and the flag-shaped hysteretic behavior of hybrid joints with different mild steels under cyclic loads can be modeled well using the proposed numerical model.

Comparison of the numerical result with the test data of M-P-Z4

Comparison of the numerical result with the test data of O-P-Z4
4.2 Ground motions
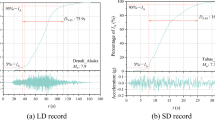
Table 16 shows the summary of the 22 set far-field ground motions adopted in this study (FEMA 2009). Each set has 2 ground motion records in different directions. Thus, a total of 44 ground motion records were used in analyses.
4.3 Structural performance
To compare structural responses DI, θc, and θm with the design targets, nonlinear dynamic analyses are conducted on both the EBSD designed structures with 44 ground motions. According to the Chinese building code (2016), ground motions are scaled as PGA = 220 gal for the five-story SCCF and 400 gal for the eight-story SCCF, respectively. The results of DI, θc, and θm of all hybrid joints are listed in Table 17.
In the design procedure, DI = 0.5 was selected to limit the damage development for the repairable requirement after seismic actions. For the five-story SCCF, DI from all seismic actions is less than 0.5 except for three specific ground motion records, which satisfies with the repairable limit defined in Table 3. Meanwhile, damages developed in the eight-story SCCF surpass the repairable limit under only four ground motions. The mean values of DI under 44 seismic actions are 0.306 and 0.415, respectively. They are both smaller than the design target. Since the maximum of EHi, joint/EH, joint was adopted in this paper to conservatively design the structure, the actual energy demand of each floor is less than the design value. As shown in Eq. (8), DI decreases with smaller ∫dE, which leads to the numerical results less than design expectation. Nevertheless, according to Table 3, DI = 0.306 and 0.415 represent the moderate damage state, implying good agreement with the desired damage development. Meanwhile, θc and θm well match the target objectives determined during the EBSD design process. According to the standard deviations listed in Table 17, the discrepancy of quantified damages in hybrid joints is relatively bigger than that of deformation indexes. It indicates that damages developed in structures not only relate to structural features, but also ground motion characteristics. Damages formed in structures might vary greatly under different seismic actions.
Figure 13 presents statistical results of EHi, joint/EH, joint under 44 scaled ground motions for the EBSD designed five-story and eight-story SCCFs. It can be seen that the mean values of EHi, joint / EH, joint are in good agreement with the predicted energy distribution listed in Tables 10 and 11. It indicates that the proposed method can reasonably quantify the distribution of energy demand in self-centering frame structures. On the other hand, great discrepancy in the energy distribution under different seismic actions can be observed according to statistical results (STD, MEAN + STD and MEAN–STD). It implies that the energy factor depends on both the structure features and earthquake characteristics.

Comparison of energy dissipation
Seismic fragility analyses are conducted on both examples designed using the EBSD and DDBD procedures. Figure 14 shows fragility curves of two designed structures corresponding to three limit states, including Immediate Occupancy (IO), Life Safety (LS) and Collapse Prevention (CP). These limit states are defined with the maximum deformation in accordance with minor earthquakes, DBE and MCE given in Table 4. It can be seen that for the same Sa(T1, 5%), DDBD has higher probability of exceedance than EBSD on all three states considered in both design examples. This means that DDBD designed structures are likely to have more damages than the EBSD designed structures. Similarly, the differences of 50% exceedance probability between EBSD and DDBD designed five-story structure for IO, LS and CP are 0.12 g, 0.13 g, and 0.14 g, respectively for the five-story SCCF, while that of the eight-story structure are 0.9 g, 0.11 g and 0.14 g. This shows DDBD designed structures are more vulnerable. Since structural damages gradually develop and accumulate with bigger earthquakes, cumulative damages will have more significant effects on structural performance. Therefore, the EBSD designed structures exhibit better aseismic capacity, which results from the hysteretic energy considered in EBSD.

Comparison of fragility curves
5 Conclusions
To improve structural performance and optimize post-earthquake repairable capacity, self-centering frame structures have been developed. These systems exhibit excellent aseismic performance and resilient capacities, whereas existing design procedures cannot consider the effects of cumulative damages. This paper presents an energy-based seismic design (EBSD) procedure for self-centering concrete frame structures. Based on a proposed damage model, hysteretic energy demand EH is introduced as a key design parameter to consider the effects of cumulative damages on structures. In addition, the damage state and structural deformation under the target earthquake intensity can be assigned. EBSD allows designers to select performance objectives for different seismic intensities corresponding to different structural performance targets. The detailed derivation of EBSD is illustrated in the paper. To demonstrate the applicability of EBSD, two SCCFs with different heights and hazard levels are designed and analyzed by nonlinear dynamic analyses. The results show that the EBSD designed structures exhibit better performance and more controlled damage than the DDBD. Meanwhile, the damage state and deformation responses well match the objectives determined during the EBSD design process. The results show that the well-designed structures satisfy with the repairable performance objective, which indicates significant source savings and downtime reduction for the structure after earthquakes.
References
ACI Innovation Task Group 1 (2003) Special hybrid moment frames composed of discretely jointed precast and post-tensioned concrete members: ACI T1.2–03. Farmington Hill: American Concrete Institute
Akbas B, Shen J, Hao H (2001) Energy approach in performance-based seismic design of steel moment resisting frames for basic safety objective. Struct Des Tall Spec Build 10(3):193–217
Akiyama H (1985) Earthquake resistant limit state design for building. University of Tokyo Press, Tokyo, p 1985
Barbagallo F, Bosco M, Floridia A, Marino EM, Rossi PP (2020) Design for seismic upgrading of existing RC frames by friction dampers. Ingegneria Sismica 37(1):5–18
Bojorquez E, Ruiz SE, Teran A (2008) Reliability-based evaluation of steel structures using energy concepts. Eng Struct 30(6):1745–1759
Cai X, Pan Z, Zhu Y, Gong N, Wang Y (2021) Experimental and numerical investigations of self-centering post-tensioned precast beam-to-column connections with steel top and seat angles. Eng Struct 226:111397
Cheok G, Stone W, Lew HS (1993) Performance of 1/3-scale model precast concrete beam–column connections subjected to cyclic inelastic loads—report no. 3. NISTIR 5246, National Institute of Standards and Technology, NIST, Gaithersburg
Cheok G, Stone W (1994) Performance of 1/3-scale model precast concrete beam–column connections subjected to cyclic inelastic loads—report no. 4. NISTIR 5436, National Institute of Standards and Technology, NIST, Gaithersburg
Chou CC, Uang CM (2000) Establishing absorbed energy spectra – an attenuation approach. Earthq Eng Struct Dyn 29(10):1441–1455
Chou CC, Uang CM (2003) A procedure for evaluating seismic energy demand of framed structures. Earthq Eng Struct Dyn 32(2):229–244
Code for Seismic Design of Buildings [GB 50011–2010 (2016 Edition)] (2016) Ministry of Housing and Urban-rural Construction of the People’s Republic of China
Cruz MF, Lopez OA (2000) Plastic energy dissipated during an earthquake as a function of structural properties and ground motion characteristics. Eng Struct 22(7):784–792
Decanini LD, Mollaioli F (1998) Formulation of elastic earthquake input energy spectra. Earthq Eng Struct Dyn 27(12):1503–1522
Du B, He Z, Huang GH (2019) An estimate on distribution of hysteretic energy demand in seismic precast concrete frame structures. J Earthq Eng. https://doi.org/10.1080/13632469.2019.1605950
El-Sheikh M, Sause R, Pessiki S, Lu LW (1999) Seismic behavior and design of unbonded post-tensioned precast concrete frames. PCI J 44(3):54–71
El-Sheikh M, Pessiki S, Sause R, Lu LW (2000) Moment rotation behavior of unbonded post-tensioned precast concrete beam–column connections. ACI Struct J 1:122–132
Fajfar P, Gaspersic P (1996) The N2 method for the seismic damage analyses of RC buildings. Earthq Eng Struct Dyn 25(1):31–46
FEMA P695 (2009) Quantification of building seismic performance factors Federal Emergency Management Agency Washington, DC
Housner GW (1959) Limit design of structures to resist earthquakes. Proceedings of the first world conference on earthquake engineering
Korkmaz HH, Tankut T (2005) Performance of a precast concrete beam-to-beam connection subject to reversed cyclic loading. Eng Struct 27(9):1392–1407
Lopez-Barraza A, E. Ruiz S, Reyes-Salazar A, Bojorquez E, (2016) Demands and distribution of hysteretic energy in moment resistant self-centering steel frames. Steel Compos Struct 20(5):1155–1171
NZS3101: 2006 (2006) Concrete Structures Standard: Part I - The design of concrete structures. Standards New Zealand, Wellington
NZS3101: 2006 (2006) Appendix B: special provisions for the seismic design of ductile jointed precast concrete structural systems. Standards New Zealand, Wellington
Pampanin S, Marriott D, Palermo A (2010) PRESSS design handbook. New Zealand Concrete Society Industry, Auckland
Park YJ, Ang HS (1985) Mechanistic seismic damage model for reinforced concrete. J Struct Eng 111(4):722–739
PEER (2000) Open system of earthquake engineering simulation (OpenSees). University of California, Berkeley, CA, Pacific Earthquake Engineering Research Center
Priestley MJN, Tao J (1993) Seismic response of precast prestressed concrete frames with partially debonded tendons. PCI J 38(1):58–69
Priestley MJN, Sritharan S, Conley JR, Pampanin S (1999) Preliminary results and conclusions from the PRESSS five-story precast concrete test building. PCI J 44(6):42–67
Priestley MJN (2002) Direct displacement-based design of precast/prestressed concrete buildings. PCI J 47(6):66–78
Song G, Yang TY, Zhou Y (2021) Distribution of hysteretic energy demands in self-centering concrete frame structures. Soil Dynam Earthq Eng 148:106828
Xue D, Bi K, Dong H, Qin H, Han Q, Du X (2021) Development of a novel self-centering slip friction brace for enhancing the cyclic behaviors of RC double -column bridge bents. Eng Struct 232:111838
The building Center of Japan (2005) Technological standard for earthquake-resistant calculation method for buildings based on energy balance. (in Japanese)
Tu BB, Zhao D (2018) Distribution of accumulated irrecoverable hysteretic energy in MDOF structures. Multidiscip Model Mater Struct 14(2):202–215
Uang CM, Bertero VV (1990) Evaluation of seismic energy in structures. Earthq Eng Struct Dyn 19(2):77–90
Wang B, Zhu S, Chen K, Huang J (2020) Development of superelastic SMA angles as seismic-resistant self-centering devices. Eng Struct 218:110836
Wang B, Nishiyama M, Zhu S, Tani M, Jiang H (2021) Development of novel self-centering steel coupling beams without beam elongation for earthquake resilience. Eng Struct 232:111827
Wu H, Sui Y, Zhou T, Huang B, Li X (2021) A novel self-centering energy-dissipating wall panel with framed beams as boundaries. Eng Struct 232:111864
Yang TY, Tung D, Li YJ (2018) Equivalent energy-based design procedure for earthquake resilient fused structures. Earthq Spectra 34(2):1–21
Yang TY, Atkinson J, Tobber L, Tung DP, Neville B (2020) Seismic design of outrigger systems using equivalent energy design procedure. Struct Des Tall Spec Build 29(10):e1743
Zhou Y, Song G, Huang SM, Wu H (2019a) Input energy spectra for self-centering SDOF systems. Soil Dynam Earthq Eng 121:293–305
Zhou Y, Song G, Tan P (2019b) Hysteretic energy demand for self-centering SDOF systems. Soil Dynam Earthq Eng 125: 105703
Zhou Y, Song G, Huang W (2020a) Performance-based damage evaluation of hybrid joints. B Earthq Eng 18:3781–3816
Zhou Y, Song G (2020b) Design energy spectra for self-centering SDOF systems. Earthq Eng Eng Dynam 40(2):1–12 ((in Chinese))
Acknowledgements
The authors are grateful for the financial support received from the National Key Research and Development Program of China (Grant No. 2016YFC0701101), National Natural Science Foundation of China (Grant No. 52025083, Grant No. 51778486), Shanghai Committee of Science and Technology (Grant No. 19DZ1201200) and China Scholarship Council during a visiting study in University of British Columbia (No.201906260206).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Song, G., Yang, T.Y. & Zhou, Y. Energy-based seismic design for self-centering concrete frames. Bull Earthquake Eng 19, 5113–5137 (2021). https://doi.org/10.1007/s10518-021-01157-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-021-01157-2