
Abstract
In this study, we consider the shelter location and allocation problem under demand uncertainty. In particular, we seek to improve the disaster preparedness level of Turkey by developing a robust optimization approach for locating shelter areas required after a disastrous earthquake in Istanbul. Our robust modelling framework implements a demand prediction methodology which generates a number of ground shaking scenarios by incorporating the effect of uncertainties in seismic parameters as well as the exposure level of the urban vulnerability. We reformulate the deterministic mixed integer linear programming version of the problem as a robust model. This model leverages the robust nature of the model to account for the uncertainties of parameters within each individual scenario. Our numerical results for the small-scale Kartal district of Istanbul and the large-scale Anatolian side of Istanbul case studies show that the proposed formulation yields solutions that are socially more acceptable and preferable than those obtained by their deterministic and stochastic counterparts. Aiming to produce stable and proper solutions that perform consistently well for any possible occurrence of uncertain parameters, the recommended robust solutions lead to better results by reducing possible regret which cannot be compensated after an earthquake.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Natural disasters and complex emergencies have been affecting people, causing enormous losses of human life as well as economic and material destruction. The considerable costs and impact of such events have become recurring causes of concern for many countries. As natural disasters are becoming more frequent, intense, and costly, the number of affected people has also been growing rapidly (De Haen and Hemrich 2007).
According to the “Natural Disasters-2018” report prepared by the Centre for Research on the Epidemiology of Disasters, there were 315 natural disasters causing 11,804 deaths, more than 68 million people affected, and US$131.7 billion cost across the world in 2018. The report also reveals that earthquakes were the deadliest type of disaster accounting for more than 45% of deaths. Some examples of earthquakes causing massive loss of life and property in the last two decades include the Izmit, Turkey earthquake in 1999 (17,000 deaths), Indian Ocean earthquake and tsunami in 2004 (227,898 deaths), Sichuan, China earthquake in 2008 (87,587 deaths), Haiti earthquake in 2010 (222,500 deaths), Tōhoku, Japan earthquake and tsunami in 2011 (20,896 deaths), and Indonesia earthquake in 2018 (4,340 deaths). Among them, the Indian Ocean earthquake and tsunami in 2004 provided evidence that the performance of an emergency aid response is strongly related to the efficiency of disaster logistics planning (Pettit et al. 2011). Fritz (2005) reported that disorganized and not well-planned structure of relief operations conducted during the tsunami led to large-scale shortages of inventories as well as medical personnel, thereby sparkling considerable interest among researchers and practitioners to the planning and implementation of humanitarian relief operations (Kovács and Spens 2007; Tatham and Christopher 2018).
The main purpose of humanitarian logistics, or humanitarian relief chain, is to alleviate the suffering of vulnerable people by planning, implementing, and controlling an efficient delivery and warehousing of goods, materials, and information, from the point of origin to the affected area and people during a natural disaster or complex emergency (Thomas and Kopczak 2005). The importance of a well-planned logistics management is especially higher for disasters like earthquakes, for which there is no (or limited) warning. The high uncertainties associated with the time, location, magnitude, and intensity of an earthquake strike, and the number of affected people make it extremely challenging for decision-makers to undertake pre-disaster decisions and investments. Therefore, organizations should incorporate Operations Research and Management Science (OR&MS) methodologies to their earthquake disaster preparedness plans to identify the properties of uncertainties and develop effective location and allocation of resources before a disaster hits.
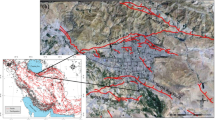
Turkey, located on an active seismic belt at the boundary where the Arabian Plate and the African Plate are moving towards the Eurasian Plate, has suffered from devastating earthquakes in the past years. The most recent significant earthquake experienced in 1999 in Izmit with the magnitude of 7.4 resulted in more than 17,000 fatalities, 44,000 injuries, more than 100,000 collapsed buildings, and some 500,000 people homeless (Bendimerad et al. 2000; Özmen 2000). Devastating the city of Izmit, the earthquake also affected the districts of Istanbul, Sakarya, Yalova and Duzce.
The same fault line (called the North Anatolian Fault Line) is expected to create another disastrous earthquake near Istanbul, Turkey’s most populous city (with over 15 million people) in the near future again (Murru et al. 2016). Research indicates that there is a \(44\pm 18\%\) probability that Istanbul will be hit by a big shock of magnitude \(M > 7.0\) (M stands for magnitude) earthquake by 2030 (Parsons 2004; Kalkan et al. 2008). This prediction is also supported by several reports conducted by the Istanbul Metropolitan Municipality (IMM). Among them, reports IMM (2003, 2009a, 2009b) analyze the impact and risk of a possible earthquake in the region from multiple perspectives, e.g., social, political, economic, and draw attention to the importance of disaster preparedness plans. Indeed, the risks in the city posed by earthquakes have been increasing steadily due to bad construction techniques, inadequate infrastructure, overcrowding, etc. Although urban renewal, redevelopment, and construction activities have gained considerable pace in the last years, there is still a lack of comprehensive plans, complementary strategies, and legal arrangements to cover different aspects of transformation (Koramaz et al. 2018).
According to the report (JICA 2002) prepared by the IMM and Japan International Cooperation Agency (JICA), the relief operations during the 1999 Izmit earthquake were not well organized in the first three days—the most crucial period—to assist and shelter the affected people in the region. In the particular case of Turkey, the Turkish Red Crescent (http://www.kizilay.org.tr/) is responsible for organizing such relief and recovery plans by selecting suitable shelter locations. This is achieved by generating a ranking procedure for all candidate shelter locations by considering a number of assessment criteria such as accessibility of the shelter area, distance to healthcare institutions, topography, slope of the terrain, and infrastructure. Upon ranking the locations, the Turkish Red Crescent simply selects sites starting from the top-scoring candidate location to lower sequentially until the overall capacity of sheltering is enough for accommodating the affected people in the region.
In their paper, Kılcı et al. (2015) described and improved the above methodology by developing a deterministic mathematical model which maximizes the minimum weight of open shelters while ensuring a sufficient level of service and utilization of shelters. In a follow-up study, Kınay et al. (2018) successfully implemented a stochastic modeling framework for the same problem to capture the demand uncertainty. In particular, the authors proposed a maxmin programming model which incorporates probabilistic constraints associated with shelter utilization rates and capacities. Using the data of two real-world cases, one for Kartal district in Istanbul and other for the whole Anatolian side of Istanbul, they showed that their approach can make a full difference in the performance compared to that of the deterministic approach.
Although stochastic programming implementations in disaster relief studies can successfully incorporate uncertainties by minimizing an expected cost over multiple scenarios, they neglect the impact of individual scenarios, which can lead to large relative regret and cast doubt on overall network robustness. Considering that natural disasters happen rarely and access to reliable data is limited in crises, obtaining accurate probability distributions that explain parameter uncertainties is another challenge for planners. Hence, a successful humanitarian relief operation should incorporate a robust relief network design which performs well across all possible scenarios (Ergun et al. 2010; Paul and Wang 2019). This motivates us to implement a robust optimization approach for such earthquake disaster management applications in which infeasibility cannot be accepted at all, and no distributional information is available or the parameter uncertainty is not stochastic.
In this paper, we seek to improve the disaster preparedness level of Turkey by developing a robust optimization approach for the problem of shelter area location and allocation in an effort to provide decision support to the Turkish Red Crescent after an earthquake in Istanbul. Building our paper upon two recent studies (Kılcı et al. 2015; Kınay et al. 2018), we first generate a number of possible ground shaking scenarios for Istanbul which target demand (the number of affected people that need sheltering) uncertainties. Using seismology theory and the results of empirical earthquake risk assessment studies performed for Istanbul, our shelter demand prediction approach allows capturing the effect of uncertainties in seismic parameters as well as the exposure level of the urban vulnerability. Combined with our robust optimization methodology, this approach hedges against parameter uncertainty within scenarios prevalent in humanitarian relief operations which reflect the possible demand to shelter sites in a post-earthquake scenario. In our modelling framework, we also employ a set of closest assignment constraints which assigns each demand to its nearest open shelter area, thereby implicitly capturing the notion of evacuation decisions. Then, we show the performance of our modelling approach using real data for Kartal district and the whole Anatolian side of Istanbul. Additionally, we assess and compare the quality of solutions obtained from the proposed formulation with those of the stochastic approach with respect to the fairness (objective function value), accessibility (mean walking distance to the shelter), satisfaction (feasibility for a scenario), and mean utilization rate performance measures.
We now review a selection of the literature on shelter site selection problems and robust optimization applications in that domain.
1.1 Related work
The shelter site selection and demand allocation problem considered in this study belongs to the large class of facility location problems for disaster relief which has a sizable literature in the context of humanitarian logistics planning. Disaster management is typically carried out through a four-phase cycle which includes mitigation, preparedness, response, and recovery. The first two phases happen before an emergency and the last two after it (Neal 1997). In this paper, we are concerned with the second phase of the cycle, which considers tactical level preparedness to avoid or lessen the impact of disasters. In a more recent study, Farahani et al. (2020) presents an excellent review of OR&MS applications in humanitarian operations performed for responding disasters.
Disaster relief studies are further categorized by Kılcı et al. (2015) as: (i) emergency medical center location problems, (ii) relief material warehouse location problems, and (iii) shelter site location problems. Most studies in the first two categories are covered by existing papers. Therefore, in this section, we give a brief review of studies which tackle the shelter site location–allocation problems. We also focus on studies considering the particular case of pre-disaster planning for a future Istanbul earthquake as well as notable studies that implement robust optimization techniques.
A shelter site is a safe physical space containing shelters, basic services (health care, sanitation, education, etc.), and goods (water, food, clothing, etc.) for hosting people affected by a disaster. The shelter site selection problem considers determining the locations of shelters as well as the allocation of demand to the shelters for improving the post-disaster recovery phase of the affected population.
Among studies which tackle the shelter site selection problem, Pan (2010) proposed a maximal covering location model for determining the locations of shelters in a typhoon-induced disaster scenario. They demonstrated the model performance on a small scale random instance. Coutinho-Rodrigues et al. (2012) developed a multi-objective mixed integer linear programming (MILP) model for determining shelter locations and paths (from affected districts to shelters) in case of a disaster. Considering various objectives such as the minimization of travel distances for primary and backup paths, path and shelter risks, transfer time of people to hospitals, and total number of shelters, they tested their model for a simulated fire situation in the city center of Coimbra, Portugal. Kongsomsaksakul et al. (2005) considered the shelter location problem for flood evacuation planning and posed the problem as a Stackelberg game where the leader (planner) determines shelter locations to minimize the total evacuation time and the follower (evacuees) chooses the shelter and evacuation route.
Chen et al. (2013) approached the problem from a different perspective and categorized shelters into three hierarchical groups as immediate, short-term, and long-term shelters. The authors formulated a MILP model which minimizes the total travel distance during relocation of the population in a post-earthquake scenario among different types of shelters. They discussed that the effectiveness of a relief operation strongly depends on the budgetary constraints on the construction of shelters. Liu et al. (2011) analyzed and defined a number of principles for the problem. They reported that pre-earthquake evaluation of shelter sites as well as environmental, social, and economic impacts likely to arise from an earthquake play a crucial role in the decision process.
In our review of the literature pertaining to the location of shelters, we encountered a number of studies which consider multiple objectives simultaneously. For example, Trivedi and Singh (2017) proposed a hybrid multi-objective model which incorporates group decision making with Analytic Hierarchy Process (AHP), fuzzy set theory, and goal programming techniques. Their model incorporates criteria used by the Turkish Red Crescent and considers minimizing risk, travel distance, number of shelters opened and uncovered portion of demand while maximizing a number of qualitative factors. In a follow-up study, Trivedi and Singh (2019) proposed a multi-criteria decision aid framework based on fuzzy sets, AHP, TOPSIS (Technique for Order Preference by Similarity to Ideal Solution) and goal programming to tackle the temporary planning problem. They demonstrated the performance of their model on a case study of the 2015 Nepal earthquake. Later, in Trivedi and Singh (2020), the authors propose another multi-objective shelter site selection model which incorporates the damage uncertainties. Considering the poor performance of multi criteria decision making tools in the presence of inconsistent data, Song et al. (2019) proposed the use of the qualitative flexible multiple criteria (QUALIFLEX) method for the shelter site location problem. They tested the proposed method on a case study of the 2008 Wenchuan County, China earthquake.
Similarly, Xu et al. (2016) proposed a multi-objective model for selecting uncapacitated shelter locations under deterministic demand and formulated it as a variant of the p-median and location set covering models. In another study, Chanta and Sangsawang (2012) proposed a bi-objective MILP formulation that maximizes the coverage portion of victims and minimizes the total distance traveled. They solve the problem for the 2011 flood disaster in Thailand using an \(\epsilon \)-constraint method. Again, focusing on the coverage performance, Wei et al. (2012) proposed an integrated location set covering and maximum covering location model for siting urban shelters in small and medium-sized cities. citenajafi2013multi formulated multi-objective, multi-period, multi-mode, and multi-commodity stochastic and robust models for planning emergency response after an earthquake response in the presence of demand and supply uncertainties. They implemented a scenario-based linear robust model similar to that used in Bertsimas and Sim (2004) and solved by converting the master problem into three sub-problems that optimize the three objectives hierarchically. In Haghi et al. (2017) the authors proposed a multi-objective robust model for locating unreliable relief goods distribution centers and health centers (allowing facility failures due to earthquakes) in emergency logistics settings. Their model attempts to maximize the response level while minimizing the total operational total costs. They formulated the model with a scenario-based approach and solved it with \(\epsilon \)-constraint method and the Nondominated Sorting Genetic Algorithm-II (NSGA-II). Alçada-Almeida et al. (2009), on the other hand, adopted a holistic approach which combines location and evacuation route assignment decisions. They formulated a multi-objective mathematical model integrated with a geographical information system-based decision support system. Their model determines the number and locations of shelters and the optimal path assignments that affected people should use after a major fire disaster. Considering disasters caused by hurricanes, Li et al. (2011) formulated a two-stage stochastic programming model which determines shelter locations and capacities at the first stage and demand allocation in the second stage. The model seeks to minimize the total system cost associated with transportation and shelter locations.
The topic of robust modeling and optimization for planning emergency logistics under uncertainties in demand, transportation time, etc. have received attention both from researchers and policy makers. There exist several studies which propose different robust modeling perspectives for relief and emergency logistics. Among those Ben-Tal et al. (2011) developed a robust optimization approach with min–max criterion and parameter uncertainty for assigning emergency response and evacuation vehicles under demand uncertainty. Considering the problem of locating relief distribution centers, Lu (2013) developed a robust formulation which seeks to minimize the maximum weighted travel time between relief stations and distribution centers. In their robust formulation, the authors used prescribed intervals for parameters, rather than probability distributions and solved it with simulated annealing based heuristic. Liu et al. (2018) first developed a stochastic model for optimal deployment of emergency resources to be used after a catastrophic earthquake in a mountainous areas.
Assuming uncertain demand and travel time, they implemented the scenario-based robust optimization approach proposed by Bertsimas and Sim (2003). Considering emergency logistics operations Du et al. (2020) also proposed a robust optimization model which uses three different parameter uncertainty sets as box set, polyhedral set, and ellipsoid set. The authors formulated the model as three stages with objectives of minimizing fixed cost, transportation cost, and total cost with respect to the needs of secondary disaster relief, respectively. For each uncertainty type, the problem is solved with off-the-shelf solvers. Kamyabniya et al. (2021), on the other hand considered the emergency logistics network which incorporates the flow between blood regional units and emergency shelters. The authors proposed a bi-objective scenario-based robust optimization model and solved it with Lagrangian relaxation and the augmented \(\epsilon \)-constraint method.
Because of the high levels of earthquake hazard, vulnerability, and exposure factors in Istanbul, seismic hazard, risk reduction action, and post-recovery studies have become progressively more important (Ansal et al. 2009). Among studies which consider the particular case of Istanbul, Bayram et al. (2015) developed a second-order conic programming model that is capable of solving real size combined location and evacuation route planning problems to optimality. They showed the performance of the conic model on the shelter location problem for Istanbul. However, they did not incorporate uncertainty in demand and evacuation management. Later, Bayram and Yaman (2018a) developed an exact algorithm utilizing Benders decomposition to solve two-stage stochastic mathematical model which seeks to determine the optimal shelter locations and route assignment. The first stage of their model determines the shelter site and the second stage determines routing decisions via a second-order cone programming. Using JICA (2002) data, the authors test their model on two instances for Istanbul. Bayram and Yaman (2018b) implemented a two-stage stochastic mathematical model on a case study for a potential earthquake in Istanbul and compared the performance of deterministic and stochastic programming solutions.
As another important study tackling the case of Istanbul, Kılcı et al. (2015) considered the problem of selecting temporary shelter site locations and the assignment of demand nodes (affected people) to each open shelter area. The authors proposed a mathematical model which seeks to maximize the minimum weight of open shelter areas while ensuring a sufficient level of service and utilization of shelters. They compared and validated their results for a base case scenario for Kartal district of Istanbul with those obtained from the Turkish Red Crescent’s methodology on shelter site selection. Their modelling approach incorporates deterministic data and assumes that the exact number of affected people for each demand node is known. As also stated by the authors, such data is not immediately available in the aftermath of an earthquake, and to compensate for this drawback, the model should be extended as a robust optimization model. In their follow-up study, Kınay et al. (2018) extended Kılcı et al. (2015)’s work by reformulating the problem as a stochastic model with chance constraints (associated with shelter utilization rates and capacities) that is capable of capturing demand uncertainty. Adopting a continuous uniform distribution assumption, they incorporated the variability by considering three different demand patterns as low, medium and high. They first developed an approximate deterministic equivalent formulation for their chance-constrained model and linearized it by deriving a piecewise linear approximation of the non-linear terms. Next, they solved the resulting MILP model for the Kartal district and the whole Anatolian side of Istanbul. Their numerical results implied that, compared to the deterministic model solutions, those obtained from the stochastic model is likely to improve the solution quality when uncertainty exists. They also showed that different shelter utilization rates or demand patterns may lead to completely different solutions.
The application of robust models to optimize disaster relief operations is not new. Li et al. (2012) considered the evacuation needs for a post-hurricane scenario and proposed a robust scenario-based bi-level mathematical model which seeks to minimize the expected unmet shelter demand and travel time. Their model incorporates the uncertainty of evacuation demand and the effect of shelter location decisions on the traffic dynamics. They demonstrate the performance of their modelling approach on a real-world case study for the state of North Carolina. As another example, Kulshrestha et al. (2011) developed a robust optimization approach for finding the optimal locations of shelters and their capacities under demand uncertainty. The model seeks to minimize total shelter establishment and operating costs while ensuring that all potential evacuees are accommodated. In Boonmee et al. (2016) the authors applied a robust MILP formulation which minimizes the mean and variance of the total travel distance for the problem. They demonstrated the performance of the model on a case study for the Chiang Rai province in Thailand. Yahyaei and Bozorgi-Amiri (2019) proposed a robust MILP model for determining three types of facilities, i.e., shelters, unreliable distribution centers, and supportive distribution centers. The model aims to minimize the overall opening, operating, and transportation cost of the relief network under uncertain demand. In a more recent study, Li et al. (2020) implemented a scenario-based hybrid robust and stochastic modeling approach for designing distribution center and shelter locations for responding catastrophic disasters. They proposed a hedging algorithm based on Lagrangian relaxation and tested it on a case study for the Rio de Janeiro state of Brazil.
Table 1 summarizes the basic characteristics of the aforementioned literature on shelter location studies. The first column introduces the paper, the second column states if the demand is certain (deterministic) or uncertain, the third column displays the modelling approach implemented (i.e., deterministic, stochastic, robust), the fourth column displays how the robustness concept is implemented (e.g. parameter uncertainty, multiple scenarios) for those applying robust modelling, the fifth column states whether evacuation decisions are imposed implicitly by using the closest assignment constraints, the sixth column represents whether the shelters are assumed to have limited capacities or not, the seventh column displays the type(s) of disaster the paper considers, and the last two columns represent the objective(s) and the underlying setting of the study.
The table reveals that, although several studies tackled the shelter site location problem under different objectives and settings, few of them handled the demand uncertainty explicitly by implementing a stochastic or robust optimization approach. Two of the papers applying the robust optimization approach accounted for uncertainty via generating multiple possible scenarios and optimizing over these scenarios. The rest of the papers employing the robust approach focused on the uncertainty inherent in problem parameters such as demand for shelters. To the best of our knowledge, our study is the first one to consider parameter uncertainty in a multiple scenario setting for the shelter site location problem. Moreover, the problem has never been considered from a robust optimization approach under the closest assignment constraints although it makes much sense in our problem setting as will be discussed in more detail below. We also note that the closest assignment constraints are implicitly used to capture the notion of evacuation decisions. Finally, different from previous robust studies, we adopt a more socially preferable goal (in accordance with the goals of the Turkish Red Crescent) and employ a maxmin objective function rather than minimizing cost or travel distance.
1.2 Key features and contributions of the study
We summarize the main features and contributions of our work to the relevant literature as follows:
-
(i) We utilize the basic seismology theory and results obtained from the empirical studies carried out for the North Anatolian Fault Line to derive more realistic shelter demands in the aftermath of a possible earthquake in Istanbul. In particular, our demand prediction methodology allows capturing the effect of uncertainties in (1) seismic parameters, i.e earthquake magnitude, intensity level, and (2) exposure level of the urban vulnerability, i.e. population, distance to the ruptured fault line of a possible earthquake, quality of infrastructure systems.
-
(ii) Different from the previous studies which rely on unverified and theoretical parametric probability distributions for addressing uncertainty in demand for shelter sites, for the first time in the literature, we quantify the uncertainty via seismic parameters which are allowed to vary within distribution-free uncertainty sets that are dictated by the seismology science. In our modelling framework, we take an ensemble of earthquake scenarios consisting of a finite number of equally likely earthquake magnitudes. Integrated with our demand prediction methodology, we take advantage of capturing both the predicted outcome in terms of the number of people who need shelter and the uncertainty inherent in this prediction.
-
(iii) The seismology science asserts that the number of people affected by the earthquake depends on the intensity level. Therefore, rather than perturbing the percentage of people in need of shelter as done in the previous studies, for the first time in the literature, we apply the perturbation to the intensity level which is the actual source of variation in shelter demand. This is a novel and more realistic approach for shelter demand prediction after an earthquake.
-
(iv) In our modelling framework, we also implicitly capture the notion of evacuation decisions by employing a set of closest assignment constraints which assigns each demand node to its nearest open shelter area. As another realistic assumption, we do not allow population splitting among shelters and assign all affected people living in the same district to the same opened shelter, which is also the closest one to them.
-
(v) Building our work upon Kılcı et al. (2015) and Kınay et al. (2018) which develop deterministic and stochastic approaches for the same problem in an effort to provide decision support to the Turkish Red Crescent, we propose a robust optimization approach to hedge against the uncertainty inherent in earthquake disasters. The proposed approach incorporates parameter uncertainty in a multiple scenario setting. Our sensitivity analysis and detailed comparison with the solutions obtained from the stochastic approach show that the proposed approach leads to solutions that can better adjust to a real setting. Hence, our results can provide decision support to the Turkish Red Crescent in developing socially more acceptable and preferable solutions for the case of the (expected) Istanbul earthquake.
To sum up, the main motivation and argument of our study is to provide a robust modelling framework which constitutes an alternative approach to the previously published deterministic and stochastic approaches which can potentially generate high regret and/or socially not preferable solutions. Since a realistic plan for such an important strategic decision should compensate for the uncertainty in demand that is inherent in disasters such as earthquakes, we highlight on the superiority of our modelling framework in terms of social acceptability. Having said that, in this study, we propose a novel and more realistic solution approach for a vital real-life problem which directly has an impact on alleviating the human suffering.
The remainder of this article is organized as follows: Sect. 2 introduces the shelter location–allocation problem and explains our solution methodology. Section 3 presents the mathematical formulations of the deterministic model and the proposed robust optimization model. In Sect. 4, we report and discuss the computational studies performed on two case studies, i.e., a small-scale instance for the Kartal district of Istanbul, and a large-scale instance of the whole Anatolian side of Istanbul. Additionally, we provide a detailed comparison analysis of our robust approach with the stochastic approach of Kınay et al. (2018) in this section. Section 5 concludes the paper with a few remarks.
2 The shelter location–allocation problem and solution methodology
In this section, we introduce the shelter location–allocation problem for the case of Istanbul, Turkey and the framework of our solution methodology. For this purpose, we first present the assumptions and definition of the problem in Sect. 2.1. Then, we discuss the basics of our robust optimization approach in Sect. 2.2. Finally, we explain our methodology for predicting the demand for shelters in Sect. 2.3.
2.1 Problem definition and assumptions
We consider the shelter location and allocation problem that is faced by the Turkish Red Crescent in the context of improving the earthquake disaster preparedness level for the case of Istanbul, Turkey. Before an earthquake hits, the Turkish Red Crescent aims to determine the best shelter location combination among several candidate locations to serve districts in the affected region. We denote the set of candidate shelter locations by \(i \in I\) and set of districts by \(j \in J\). Potential shelter areas, which are known in advance, are ranked with respect to the weights determined through several criteria, among which are distance to healthcare institutions, topography of the terrain, sanitary system, etc. The weight of each candidate shelter location \(i \in I\) is represented by \(w_i \in [0,1]\). A shelter area is said to be “open” if it is established and some population is assigned to it.
The objective is determined as maximizing the minimum weight of open shelter locations. Basically, this objective targets the least advantageous victims and aims to fulfill some kind of fairness level perceived among districts. Both Kılcı et al. (2015) and Kınay et al. (2018) addressed the same problem and adopted a number of assumptions in their modelling frameworks. Since we take the deterministic model proposed by Kılcı et al. (2015) as our baseline and compare the performance of our proposed robust solution methodology with that of the stochastic approach of Kınay et al. (2018), we adopt the same assumptions.
-
At least 3.5 square meters living space should be assigned to each person in the shelter area. Additionally, 45 square meter space should be reserved for utilities such as roads, sanitation, health, education, and nutrition in each shelter area.
-
People living in the same district should be allocated to the same shelter location due to keeping the social structure of the society.
-
Each shelter location \(i \in I\) has a maximum capacity \(q_i\) measured in square meters.
-
All shelter locations must be utilized above a rate, \(\beta \in [0,1]\), determined in advance.
-
Each district must be allocated to the closest open shelter.
-
The population of each district is assumed to be concentrated in its centroid.
2.2 Robust optimization approach for shelter site selection
Although facility location problems observed in the private sector and public sector share similar objective functions which seek to maximize some kind of utility subject to a number of organizational and/or technical constraints, they differ in the way that these objectives and constraints are formulated. These differences frequently influence the solutions obtained. In particular, decisions in the private sector usually involve economic concerns and incorporate system costs (or profit) and service quality trade-offs for the private owners. Public facility decisions (e.g., hospitals, fire-fighting, police station, civil defense, search, and rescue operations), on the other hand, tend to serve the society as a whole with the objective of maximizing a benefit or minimizing a cost which is not quantifiable in monetary terms (Revelle et al. 1970). Additionally, the increasing number of catastrophic disasters have forced governments to develop disaster preparedness and emergency response plans (Najafi et al. 2020). In this regard, the problem considered in this study is a public sector problem impacting the disaster management performance of governments. Hence, a successful pre-disaster management plan should prioritize the society benefit by considering the expected results of all possible scenarios. In other words, although an optimal plan which accounts for the “worst-case” may suggest opening more shelters (which potentially yields additional cost), as it is mostly observed in robust approaches, it is often the socially acceptable or socially preferable course of action. Motivated by this concern, we adopt a robust optimization approach which accounts for the whole spectrum of possible earthquake scenarios (including the worst-case) and still ensures a certain level of fairness among the districts of Istanbul.
The concept of robust optimization was first developed to manage various uncertainties and handle noisy data (Mulvey et al. 1995). It aims to generate stable and proper solutions that perform consistently well for any possible occurrence of uncertain parameters and across all scenarios (Erişkin 2021). In other words, it attempts to determine the best solution among those “immunized” against data uncertainty. Robust optimization belongs to a family of scenario-based optimization approaches such as scenario optimization (Dembo 1991) and scenario aggregation (Rockafellar and Wets 1991; Laguna 1998).
An important feature of our optimization model is that it is capable of optimizing over an ensemble of earthquake magnitude forecasts rather than only a single forecast. We start with generating a set of possible ground shaking scenarios for Istanbul, denoted by S where each scenario represents a specific earthquake magnitude denoted by \(M_s\). Next, for each district \(j \in J\) and scenario \(s \in S\), we predict the shelter demand \(d_{js}\) using the methodology described in Sect. 2.3. The robustness aspect of our proposed model is reflected by the scenario index \(s \in S\), that is present on the \(d_{js}\) parameter as well as uncertainty sets of parameters within a scenario which dramatically impact location and allocation decisions.
This modeling approach allows us to ensure that the resulting location–allocation plan performs well in a variety of possible outcomes, rather than tailoring the plan toward a single earthquake magnitude forecast or subjective variability. To quantify the benefits of our robust optimization approach in temporary shelter area location–allocation planning, we firstly examine the performance of two optimization approaches:
-
Deterministic Optimization (DO): This approach corresponds to the deterministic case proposed by Kılcı et al. (2015). It is a simple method for choosing a single scenario over which to optimize. In this approach, the problem is solved with respect to the deterministic single value of the shelter demand, denoted by \(d_j\).
-
Robust Optimization (RO): An ensemble of earthquake forecast set \(s \in S\) is generated with respect to expert opinions (IMM and JICA reports for the case of Istanbul) and principles of seismology. Given an ensemble of earthquake magnitudes \(M_s, \forall s \in S\), for each scenario \(s \in S\) and district \(j \in J\) we calculate \(d_{js}\) as defined in Sect. 2.3 and add uncertainty to the deterministic prediction for each scenario using the maximum deviation of demand from its nominal value. This technique leverages the within scenario-robust nature of the model to account for the uncertainties of parameters within each scenario in the ensemble.
Afterwards, we compare the (RO) approach with the stochastic optimization approach of Kınay et al. (2018) in terms of various performance measures by performing a post-earthquake analysis.
2.3 Shelter demand prediction methodology
In their study, Kılcı et al. (2015) assumed that approximately 12.5% of the population for a particular district would need sheltering in the aftermath of an earthquake disaster in Istanbul. This ratio is called as the Percent Affected Ratio (PAR). This assumption is based on (1) the data set provided by Unal (2010) as part of his Ph.D. thesis where he performed extensive analysis and surveys with experts, and (2) casualty and damage predictions for a possible Istanbul earthquake given by Özmen (2002). Adopting the same assumptions, Kınay et al. (2018) extended the deterministic model by assuming a uniformly distributed uncertainty around the mean value of the 12.5% PAR. However, as also stated by the authors, keeping the PAR value constant for all sub-districts in a relatively large geography is not a reasonable approach when the study involves a large geography. Moreover, in a real earthquake scenario, the PAR value of each district is strongly related to the intensity of the earthquake, which is a function of the earthquake magnitude and distance to the ruptured fault line. As Jonkman et al. (2010) remarks, no general methodology that can be used to estimate casualties for different event types is available. Thus, realistic estimation methods that take into account the nature of the disaster under consideration are required. Having said that, to predict the number of people who will need sheltering in each district in the affected regions of Istanbul more accurately, we implement a novel shelter demand prediction methodology which accounts for uncertainties in seismic parameters, i.e. magnitude, intensity, as well as exposure level of the urban vulnerability, i.e. district population, distance to the ruptured fault line, and quality of infrastructures. Figure 1 displays the main components of our methodology.

Flowchart of shelter demand prediction methodology
Before proceeding with the details of our prediction methodology, we find it useful to provide preliminaries on seismic terms. The intensity of an earthquake can be defined as the effect of an earthquake over a particular area, which is simply a function of the magnitude and distance to the ruptured fault line of the earthquake. In other words, the intensity variable represents the oscillation level of the Earth’s surface during an earthquake. Intensity scales, such as the Medvedev–Sponheuer–Karnik (MSK) scale, Modified Mercalli Scale, and the Rossi-Forel scale, are used to measure the amount of shaking at a particular location. An earthquake causes different intensities of shaking in the area of the epicenter where it occurs, i.e., high intensities near the epicentre and lower intensities further away.
Earthquake magnitude is a measure of the amount of seismic energy released by an earthquake and recorded by seismographs. An earthquake has one magnitude that is measured at its source. The Richter Magnitude Scale (Richter 1935) measures the magnitude of an earthquake as the logarithm of the maximum trace amplitude expressed in thousandths of a millimeter with which the standard short-period torsion seismometer would register that earthquake at an epicentral distance of 100 kilometers (Garnder and Knopoff 1974). In seismology, the term epicenter refers to the point where an earthquake originates. Generally, the greatest damage occurs at the vicinity of the epicenter and the intensity of the earthquake is in a particular district is inversely related to the distance from the epicenter.
As the first step, we associate each scenario s with a specific magnitude \(M_s\). Next, for each district \(j \in J\) and scenario \(s \in S\), we compute the macroseismic intensity level \(IL_{js}\) as a function of the magnitude and the closest distance of the district to the ruptured fault line (in km.), \(R_j\). There exist a number of studies in the literature that attempt to derive this relationship. Among them, Erdik and Eren (1983) focused on the attenuation of earthquake intensities in Turkey and compiled available iso-seismal maps and data. Hence, at the second step, we compute all district-fault line distances and use the following empirical equation proposed by Erdik and Eren (1983) to predict the intensity levels along the regions close to the North Anatolian Fault Line:
where \(\sigma _{IL}\) is the standard deviation of the intensity.
Using the same attenuation function (1) and the MSK scale, Özmen (2002) assessed the expected damage in Istanbul for a possible earthquake in the Marmara region of the North Anatolian Fault. The MSK scale Medvedev and Sponheuer (1969), also referred as MSK-64 scale, is a commonly used scale which assesses the severity of ground shaking with respect to its observed impact to an area during an earthquake. It uses 12 intensity degrees expressed in Roman numerals. Adopting a similar approach in our third step, we predict the shelter demand from each district \(j \in J\) and for each scenario \(s \in S\), denoted by \(d_{js}\), using the empirical building damage level percentages given in Özmen (2002) and casualty estimations as given in Unal (2010). For the sake of completeness, we provide a summary of these assumptions and empirical data below.
Table 2 reports the percentage of buildings damaged (heavy, medium, and light) during the 1999 Izmit Earthquake in the affected areas of different intensities varying between level VI and X. Özmen (2000) reported that, building structures in Istanbul show similar properties with those in Izmit and these ratios can be used to predict the damage ratios for a possible disastrous earthquake in Istanbul. Similarly, Pyper Griffiths et al. (2007) assessed the seismic risk in Istanbul and stated that one should expect the ratio of buildings that may be damaged or collapsed in the southern parts of Istanbul to be the same as that of Izmit and Düzce. We also note that for the fractional \(IL_{js}\) values returned by the equation (1), we calculate their corresponding damage percentages by simply interpolating the data given in Table 2.
Using Table 2 data, Unal (2010) predicted the number of people who are affected and the number of people who need sheltering using the following assumptions:
-
The number of infrastructures of a district is approximately equal to the ratio of district population to the average size of a household, which is taken as 3.75.
-
25% of the population residing in heavily damaged, 0.5% of the population residing in medium damaged, and 0.005% of the population residing in lightly damaged houses are expected to die.
-
75% of the population residing in heavily damaged, 75% of the population residing in medium damaged, and 0.005% of the population residing in lightly damaged houses are expected to be directly affected by the earthquake.
-
50% of the affected population will need sheltering while others will leave the region.

a Intensity levels as a function of magnitude and distance to fault line b resulting PAR values
Figure 2a, b display the intensity levels and resulting PAR values, respectively, calculated for different magnitudes (varying between 6 and 8) and distances to the fault line (varying between 5 and 35 km). Although the direction of the relationship between seismic parameters, the exposure level of vulnerability, and PAR is known, generating a good (or realistic) PAR estimate is a challenge for planners. As can be seen in the figure, PAR value can change significantly depending on the seismic parameters and exposure level of the urban vulnerability. Thus, selecting unverified parametric probability distributions may yield inaccurate demand predictions. Calculated in accordance with the principles described in this section, the individual PAR values predicted for each district and scenario are more realistic to address the uncertainty in demand for shelter after a possible earthquake.
The details of our PAR predictions for the case of Istanbul will be reported in Sect. 4.
3 Problem formulation
In this section, we provide the details of the two modelling approaches (i) deterministic MILP formulation denoted by (DO), and (ii) within scenario robust formulation denoted by (RO).
3.1 Deterministic MILP formulation
Proposed by Kılcı et al. (2015) and later revised by Kınay et al. (2018), the main objective of this formulation is to select the best possible combination of shelter areas while assigning each district to an open shelter area. The objective function considers the weights of the candidate shelter locations and maximizes the minimum weight of open shelters. In the formulation, it is assumed that the exact district demands are known in advance. In this respect, the deterministic model is formulated as a MILP model as follows:
Sets
-
\(i \in I\) : Set of candidate locations
-
\(j \in J\) : Set of districts
Parameters
-
\(w_i\) : Weight of candidate shelter location \(i\in I\), \(w_i\in [0,1]\)
-
\(d_j\) : Total demand of district \(j \in J\) (square meters)
-
\(q_i\) : Capacity of candidate shelter location \(i\in I\) (square meters)
-
\(distSorted_{ij}\) : \(i^{th}\) closest candidate shelter location index to demand node \(j\in J\)
-
\(\beta \) : Threshold value for minimum utilization of open shelters
-
\(dist_{ij}\) : Distance between candidate shelter location \(i\in I\) and district \(j\in J\)
Decision Variables
-
\(x_{i}\) = \({\left\{ \begin{array}{ll} 1, \text { if candidate location }i \in I \text { is chosen as a shelter area } \\ 0, \text { otherwise} \\ \end{array}\right. }\)
-
\(y_{ij}\) = \({\left\{ \begin{array}{ll} 1, \text { if district }j\in J\text { is assigned to location }i \in I \\ 0, \text { otherwise} \\ \end{array}\right. }\)
-
\(w_{min}\) = minimum weight among open shelters
Formulation
The objective function (2a) maximizes the minimum weight of open shelter areas. Together with the objective function, constraints (2b) ensure that \(w_{min}\) takes the minimum weight of the open shelters. Constraints (2c) guarantee that each district is assigned to one and only one shelter location. Constraints (2d) ensure that capacities of the shelter areas are not exceeded. Constraints (2e) define the minimum utilization rate for each shelter location. Constraints (2f) and (2g) provide that each district is assigned to the closest open shelter location. Decision variable domains are defined via constraint sets (2h) and (2i).
Constraints (2f) and (2g) are called as the closest assignment constraints and were initially proposed by Rojeski and ReVelle (1970). There are several other closest assignment constraint alternatives proposed in the discrete location analysis literature. Espejo et al. (2012) identified and discussed the most promising ones. Among those alternatives, Kınay et al. (2018) adopted the constraint set (3) which was originally proposed by Wagner and Falkson (1975), and reported that it is more efficient for large-scale problems in terms of computation time. It was also proved by Espejo et al. (2012) that (3) dominates (2f) and (2g).
In this study, we implemented the closest assignment constraint alternative (4) proposed by Berman et al. (2009). As we will show in Sect. 4.2, this set of constraints presents better performance compared to (2f) and (2g) as well as constraints (3) in terms of computation time.
The closest assignment constraints (4) in the model particularly reflect the human behaviour and implicitly captures routing decisions because after the occurrence of a disaster, individuals instinctively tend to reach to the closest open shelters. The model ensures this requirement along with the indivisibility of demand (2c), capacity constraints (2d), and minimum utilization constraints (2e). In other words, the generated solutions satisfy that, if a candidate shelter location is closest to a demand point (district), and there does not exist any feasible allocation of districts to this location that satisfies the utilization and/or capacity requirements, then the model does not allow this location to be "open" in the solution.
3.2 Robust MILP formulation
In this section, we propose a robust counterpart of the formulation (DO). For the new model formulation, we define the following additional set, parameters and decision variables.
Additional Set
-
\(s \in S\) : Set of scenarios
Additional Parameters
-
\(d_{js}\) : Total demand of district \(j \in J\) in scenario \(s \in S\) (square meters)
-
\({\overline{d}}_{js}\) : Total nominal demand of district \(j \in J\) in scenario \(s \in S\) (square meters)
-
\({\widehat{d}}_{js}\) : Maximum deviation in demand of district \(j \in J\) in scenario \(s \in S\) from its nominal value \({\overline{d}}_{js} \) (square meters)
-
\(\tau _s\) : Uncertainty level of demand in scenario \(s \in S\), \(\tau _s\) \(\in [0,1]\)
Additional Decision Variables
-
\(y_{ijs}\) = \({\left\{ \begin{array}{ll} 1, \text {if district }j \in J\text { is assigned to location }i \in I\text { in scenario }s \in S \\ 0, \text { otherwise} \\ \end{array}\right. }\)
First developed by Bertsimas and Sim (2003, 2004), this modeling technique allows point estimates of uncertain demand to vary in distribution-free uncertainty sets within each scenario to provide within-scenario robustness. Being uncertain by nature, the shelter demand of district j in a scenario s can be defined with the following uncertainty set:
where \({\overline{d}}_{js}\) is the nominal demand value of district j in scenario s, while \({\widehat{d}}_{js}\) represents the maximum deviation of demand of district j from its nominal value \(({\overline{d}}_{js})\) in scenario s. This formulation of uncertainty allows demand to vary in the interval uncertainty set \([ {\overline{d}}_{js}-{\widehat{d}}_{js}, \ {\overline{d}}_{js}+{\widehat{d}}_{js}]\), while amount of deviation from the nominal value (in other words, robustness level of the solution) is controlled by the uncertainty level \(\tau _s\), where \(\tau _s\) \(\in [0,1]\). When \(\tau _s = 0\), the problem reduces to the deterministic version and demands take their nominal values. Conversely, when \(\tau _s = 1\), the problem is solved for the worst case scenario and becomes the most conservative one.
It should also be noted that the formulation of a robust counterpart is strongly connected with the selection of an appropriate uncertainty set. There exist a number of other alternative uncertainty sets, e.g., polyhedral, ellipsoidal, in the literature. In the robust optimization framework, if the uncertainty set defined by the decision-maker covers the whole uncertain space, then it is ensured that the robust solution (if it exists) is feasible for any realization of uncertainty. In this study, we modelled the uncertainty associated with the earthquake magnitude by using an interval uncertainty set. This choice is preferable since it is capable of reflecting the actual variability in the earthquake magnitude level (given in Equation (1)) and covering the whole uncertain space. Additionally, its implementation and analysis in our robust framework is relatively more tractable. Another variation could be to apply a budget of uncertainty which would narrow the total uncertainty within a scenario such that:
where \(\varGamma _s\) represents the uncertainty budget defined for scenario s. When \(\varGamma _s=0\), no uncertainty is allowed for the parameters associated with scenario s, which enforces them to take their nominal values. When \(\varGamma _s=|J|\), on the other hand, Equation (6) becomes redundant and the individual parameter uncertainty level is controlled with Equation (5). As Bertsimas and Thiele (2006) remarked, the main rationale for using a budget of uncertainty is the assumption that some forecasts will exceed their nominal values while others will fall below the estimate, hence, as the number of sources of uncertainty increases it is likely that the aggregated scaled deviation will belong to a much narrower range. Conversely, low probability solutions might involve high-magnitude risks and may not be acceptable for the society. Applying the robust optimization approach to the humanitarian relief logistics, the purpose of which is to alleviate the suffering of vulnerable people, we find it safer not to apply a budget of uncertainty. Accordingly, within scenario robust model formulation is provided below:
The MILP model (RO) considers all scenarios simultaneously and addresses uncertainty in demand within scenarios through constraints (7d) and (7e). The rest of the constraints are the same as those in model (DO) while they are augmented to cover all scenarios under consideration. The model (RO) maximizes the minimum weight of open shelters while the demand of each district is subject to deviation bounded by the uncertainty sets. Note that we only consider the positive deviations from the nominal demand in constraints (7d) and (7e), even though negative deviations are also possible in reality. Keeping in mind that the purpose of humanitarian relief operations is to alleviate the human suffering, we find it socially more preferable to focus on only the positive deviations in demand in our formulation.
4 Computational results
In this section, we present application of the robust formulation (RO) on two case studies. In both cases, models are implemented in General Algebraic Modeling System (GAMS 2012) and R (R Core Team 2017) and solved with CPLEX 12.5. All runs are performed on a computer having Intel Xeon E5-2630 2.40 GHz (2 Core) processor and 128 GB of RAM.
4.1 Computational study for the Kartal district
The data set we used for the Kartal district of Istanbul was first generated by Unal (2010)) as part of his Ph.D. thesis, and later used by Kılcı et al. (2015) and Kınay et al. (2018). Having 38.54 square kilometers of area and a population of 425.000, Kartal is one of the 39 districts of Istanbul. There are 25 candidate shelter locations, each having a weight ranging from 0.674 to 0.982 with an average of 0.827 and standard deviation 0.097. Capacities of these shelters range from 24,000 square meters to 150,000 square meters with an average capacity of 49,309. There are 20 sub-districts of Kartal demand points of which are considered as sub-district centroids.
In their study, Kılcı et al. (2015) assumed that approximately \(12.5\%\) of the population would need to stay in the shelter areas after an earthquake. Additionally, they assumed that this percentage is constant for all sub-districts. Emphasizing that a so-called PAR assumption of \(12.5\%\) is not reasonable since this parameter can hardly be known in advance, Kınay et al. (2018) introduced demand variability of PAR by considering three different patterns which essentially correspond to different levels of variability: high, moderate and low. Centering in the original PAR value assumed by Kılcı et al. (2015), Kınay et al. (2018) considered an uniform interval for each pattern t such that \(PAR=12.5\% \times U[a_t,b_t]\) and 10 figures from each variability pattern were drawn to form a sample for demand values. Then, \(\mu _j\) and \(\sigma _j\) are estimated from this sample as the parameters of the demand distribution. The main drawback of this approach is that these uncertainty patterns are subjective and regarding distribution may not represent uncertainty in shelter demand after an earthquake because the number of people that would need shelter area is closely related to the intensity of the earthquake. Additionally, Kınay et al. (2018) assumed that the expected value of the PAR is \(12.5\%\), however, this figure should be calculated based on the probability mass function of earthquake intensities which indeed dictate the number of people that will require shelter along with the exposure level of the urban vulnerability.
To overcome the drawbacks of the previous approaches and calculate more realistic shelter demand values, we generated a number of earthquake scenarios. In particular, the predictions given in JICA (2002) and IMM (2003) considered a number of earthquake scenarios with magnitudes varying between 6.9 and 7.7 depending on the surface length of the North Anatolian Fault Line rupture for a possible earthquake expected to occur in Istanbul until 2030. However, the historical earthquakes occurred in the region reveal that the faults near Istanbul are capable of generating earthquakes with magnitudes up to 7.9. Hence, we define 21 distinct scenarios, each of which corresponds to a different magnitude varying between 6.9 to 7.9, i.e., \(M_s \in \{6.90, 6.95,\ldots ,7.90 \}\). Hinged on the intensity of a given earthquake and the exposure level of the urban vulnerability, the shelter demand of each sub-district of Kartal is predicted in accordance with the procedure explained in Sect. 2.3. Distance between each district and its closest fault line is measured by using the online distance calculator tool in Disaster and Emergency Management Presidency’s interactive web application for Turkey earthquake hazard maps (AFAD 2018). Consequently, average and individual sub-district PAR figures calculated for each scenario \(s \in S\) are displayed in Fig. 3. As seen from the figure, the average PAR values for Kartal vary between \(7.14\%\) to \(17.98\%\). As expected, the intensity and shelter demand is proportional to the magnitude and inversely proportional to the distance from the fault line. For a given scenario, the differences among sub-district PAR quantities are explained by the varying distances between sub-districts and fault lines. For a given sub-district, on the other hand, the differences among scenarios are caused by the effect of earthquake magnitude levels.

PAR values calculated for all 21 scenarios and 20 sub-districts of Kartal. Solid lines with circles represent PAR quantities averaged over all sub-districts. Small circles represent PAR value of each individual sub-district. The dashed and dotted lines display the minimum and maximum PAR values among the 20 sub-districts, respectively
4.1.1 Results of the deterministic model
Firstly, we solve the shelter location–allocation problem for each scenario \(s \in S\) with the (DO) model to obtain their corresponding deterministic solutions for ten different minimum utilization threshold values as \(\beta = \left\{ 0.0, 0.1,\ldots ,0.9\right\} \). Hence, solving each of the 21 scenarios with 10 different \(\beta \) values leads to a total of 210 instances.
Solutions and objective function values obtained for all 210 instances are reported in Table 3. The results reveal that (DO) is capable of finding feasible solutions for all scenarios when \(\beta \le 0.6\). Among all feasible solutions, the objective function values vary between 0.948 and 0.803. As expected, (DO) tends to yield better objective values for smaller demand and utilization threshold values.
The minimum and maximum number of shelters opened are observed as 2 and 9, respectively. Recall that the model forces all affected populations to be assigned to their closest open shelter area while ensuring that the utilization of each shelter opened is greater than the defined \(\beta \) value (see constraint set (2e)). This enforces the model to suggest opening more shelters for higher PAR and smaller \(\beta \) values. However, as \(\beta \) and PAR increase, the model not only returns lower objective function values, but also fails to find feasible solutions when \(PAR>16.34\%\) and \(\beta =0.7\), \(PAR>15.42\%\) and \(\beta =0.8\), and \(PAR>14.25\%\) and \(\beta =0.9\). It can obtain a feasible solution for only 7 out of 21 scenarios when \(\beta =0.9\). Once again, these results emphasize the need for robust models which are capable of compensating the uncertainty in demand.
We also observe that the solutions obtained when \(\beta \) equals 0.7, 0.8 and 0.9 are in harmony with those of Kınay et al. (2018). However, none of the scenarios has a PAR value that is exactly equal to \(12.5\%\). For instance, PAR values of scenario 8 and 9 are \(12.2\%\) and \(12.9\%\), respectively. Deterministic solutions of scenario 8 for \(\beta =0.7\) and \(\beta =0.8\) are the same as those of Kınay et al. (2018), conversely, when \(\beta =0.9\) the model (DO) cannot reach a feasible solution for scenario 8.
4.1.2 Results of the robust model
In the robust optimization model (RO), the nominal shelter demand values of districts \(({\overline{d}}_{js})\) are equal to the deterministic values. These deterministic demand values are calculated by means of Equation (1) which predicts the intensity of an earthquake. As explained in Sect. 2.3, the number of people requiring shelter depends on the intensity. Therefore, rather than perturbing the PAR value itself, we apply the perturbation to the intensity level which is the actual source of variation in shelter demand. Accordingly, we calculated the maximum variability in shelter demand of district j in scenario s \(({\widehat{d}}_{js})\) based on the variability of intensity in that particular scenario s. We considered a maximum variation of \(3\sigma _{IL}\) in intensity, hence, we cover \(99.73\%\) of the cases that can be encountered. As pointed out in Sect. 3.2, the actual variability in shelter demand is controlled with the parameter \(\tau _s\). Therefore, when \(\tau _s=1\) for all scenarios, the model (RO) is said to be \(99.73\%\) robust. Accordingly, for the \(99.73\%\) robust model, the PAR values vary between \(19.46\%\) and \(23.57\%\).
We solve the (RO) model for different values of \(\beta =\left\{ 0, 0.1,\ldots ,0.9\right\} \) and \(\tau =\left\{ 0, 0.1,\ldots ,1\right\} \), yielding a total of 110 instances. Although (RO) has the flexibility to assign specific \(\tau _s\) for each scenario \(s\in S\), without loss of generality, we use the same demand uncertainty level in all scenarios since we have no reason or additional information to do otherwise.
The solutions obtained from the model (RO) are summarized in Table 4. In this table, columns correspond to uncertainty values while rows represent threshold values for the minimum utilization rate. Each cell in the table represents a solution, details of which are given in Table 5. The maximum \(\beta \) value that yields at least one feasible solution is 0.6, in other words, when \(\beta >0.6\) the model (RO) cannot obtain a feasible solution regardless of the value of \(\tau \). Hence, in Table 4, we do not report results for instances with \(\beta \ge 0.7\).
The first column of Table 4 essentially corresponds to the deterministic case where the model (RO) takes nominal demand values of shelters in each scenario and combines them into a single model. In this case up to minimum utilization rate of 0.2 can be achieved for all open shelters. Additionally, when we do not have uncertainty in shelter demands \((\tau =0)\), the maximum objective value we can achieve is 0.809. As uncertainty in shelter demand (in other words the robustness of the model) increases, we obtain feasible solutions for higher \(\beta \) values due to increase in shelter demand of each district. We also observe that as uncertainty in demand increases, solutions F, I and R are observed more frequently among 17 distinct solutions.
Table 5 provides additional information regarding the frequency, objective function value and opened shelters for each of the 17 distinct solutions observed in Table 4. The results reveal that with 19 observations (which accounts for \(35.18\%\) of all solutions) F is the most frequently obtained solution. Additionally, this solution meets relatively higher shelter utilization threshold requirements and achieves the maximum objective function value observed among all solutions. There are other alternative solutions that meet higher utilization threshold values for some uncertainty levels than the solution F; such as solutions M (for \(\tau =0.3\) and 0.5), N (for \(\tau =0.6\)), O (for \(\tau =0.7\)), P (for \(\tau =0.8\)), and R (for \(\tau =0.9\) and 1.0). However, the solution F outperforms these solutions in terms of the objective function value. The solution I follows F with a frequency of 7 which accounts for \(12.96\%\) of all solutions.

a Relative frequencies of solutions, b relative frequencies of shelters opened, c average of maximum and mean utilization rates of 21 scenarios for solution F
We also observe that 16 out of 17 solutions (all solutions except for R)) suggest opening shelter 4. Shelter 4 is followed by 10, 13, and 19 with relative frequencies of \(88.23\%\), \(76.47\%\) and \(70.58\%\), respectively. We also note that, these shelters are open in solution F along with shelters 12 (\(64.70\%\)), 17 (\(41.17\%\)), and 25 (\(58.82\%\)). These are the most frequently opened shelters in solutions. In this respect, relative frequencies of each solution and shelters opened are presented in Fig. 4a, b, respectively. Figure 4c shows averages of maximum and mean utilization rates of 21 scenarios when the solution F is applied for uncertainty levels \(\tau \ge 0.5\). This figure reveals that the solution F ensures relatively high utilization rates over 21 scenarios. As uncertainty level (in other words the robustness level) increases, mean and maximum utilization rates of 21 scenarios increase. When \(\tau =1.0\), which is the worst case scenario, the solution F achieves reasonably high average utilization rates even though threshold for minimum utilization enforced by the model is low. In the light of these findings, we can assert that the model (RO) recommends implementing the solution F which achieves higher utilization levels of shelters and the maximum objective function value among all solutions.
4.1.3 Comparison with the stochastic optimization approach
As a well-known approach, stochastic programming tackles the uncertainty inherent in problem parameters by assuming that the probability distributions governing these parameters are known and can be estimated. Taking advantage of this information, stochastic programming aims to find a solution that is feasible for most of the instances to occur by maximizing over the expectation of the unknown parameters. However, the empirical distributions of parameters pertaining to natural disasters such as floods or earthquake are hardly known, thereby making stochastic optimization approaches more challenging. Assuming an empirical probability distribution which does not properly represent the variation associated with the uncertain parameters may lead to solutions that are socially not acceptable or preferable and cause high regrets, which can not be compensated after the disaster occurs. Considering that uncertain parameters are usually known only within certain bounds, on the other hand, robust optimization hedges against uncertainty by considering the deterministic variability of the parameters and provides versatile solutions that are robust to all possible outcomes to some extent. Having said that, in this section, we compare the solution recommended by our robust model with those of Kınay et al. (2018) which applied stochastic programming approach to the same problem by utilizing chance constraints.
Kınay et al. (2018) obtained solutions for three different variability patterns as low, moderate, and high, and three different \(\beta \) values as 0.7, 0.8, and 0.9, as briefly explained in Sect. 4.1. Utilizing chance constraints which allow them to violate hard constraints enforcing utilization thresholds and capacity requirements, they reached a number of solutions for a set of violation probabilities. The solutions and their characteristics are summarized in Table 6. We denote their 6 unique solutions as AS,BS,CS,DS,ES,FS. As can be inferred from the table, they did not achieve a feasible solution for high variability pattern when \(\beta =0.8\) and 0.9 and obtained multiple solutions for some variability patterns due to different constraint violation probabilities.
Most of the humanitarian relief decisions are naturally a priori and made under uncertainty before a disaster occurs. After the disaster takes place, the veil of uncertainty disappears and a posteriori decisions follow which are constrained with a priori decisions. In the shelter location–allocation problem, for instance, locations of the shelters as well as allocation of demands to these shelters are determined a priori, however, allocation or routing decisions are tailored based on the given outcome of the earthquake. We based our comparison on this fact and considered 21 scenarios generated with our realistic demand prediction methodology as the omniscient cases. Assuming that an earthquake with a particular intensity has already happened, we make optimal allocations of the resulting demands to the shelters established a priori by both the recommended solution of the model (RO) and those obtained by Kınay et al. (2018). Since an earthquake has already happened and the shelters were established before an earthquake, we do not impose utilization thresholds and make allocations based on the assumptions given in Sect. 2.1, including the closest assignment constraint.
Even though our primary comparison measure is the objective function value, which essentially represents the fairness of the solution due to targeting the least advantageous districts by maximizing the minimum shelter weight, we also considered three additional measures. Proposed by Kınay et al. (2018), the accessibility measure is based on mean walking distance, providing an evaluation of how much people walk on average to reach to the nearest open shelters. Satisfaction measure represents if a solution is feasible for a realization of a particular scenario. As the last performance measure, we examine the mean utilization rates of open shelters.
We evaluated the performance of stochastic and robust modelling approaches for the realization of three different uncertainty levels: \(\tau =0\), 0.5 and 1.0. As explained previously, \(\tau =0\) corresponds to the case where demand values of scenarios take their nominal values while \(\tau =1.0\) represents the most conservative case. \(\tau =0.5\), on the other hand, represents a medium level of uncertainty. A detailed comparison of the solutions with respect to the performance measures are given in Tables 7, 8, 9, 10.
We observe from these tables that stochastic optimization solutions can not generate a feasible allocation of demands to the open shelters for none of the scenarios when \(\tau =1.0\), and for 19 scenarios out of 21 when \(\tau =0.5\). For the nominal demand case where \(\tau =0\), none of the solutions meets the capacity demands of scenarios 12 through 21. This result is to be expected due to the fact that stochastic programming optimizes over the expectation of the unknown parameters while ignoring individual scenarios. The infeasibility mainly stems from the lack of enough capacity to meet the demand, while there are a few cases where a feasible allocation can not be made in accordance with problem assumptions even though the total capacity of open shelters are enough to cover the total demand. This result can be observed from Table 9 where the figures in the table show the percentage of demand that can be met with the capacity provided by the open shelters without considering the problem assumptions such as indivisibility of demand and closest assignment in the allocation.
In terms of the fairness performance measure reported in Table 7, the robust solution F outperforms all stochastic solutions but solutions AS and DS, while objective function values of solutions F and DS are the same. This result shows that the robust solution F not only yields a feasible solution for all possible earthquake scenarios but also provides fair solutions for the people that are in need of shelter by opening high quality shelters. When we consider the accessibility performance measure reported in Table 8, we observe that the solution F outperforms all stochastic solutions by enabling the minimum mean walking distances for all scenarios. This performance measure is particularly important on the eve of an earthquake because a long walking distance to the shelters would be unbearable for the survivors, some of whom might even be injured.
As we stated, we do not seek utilization thresholds when allocating demands to the shelters after an earthquake disaster, because whether to open a shelter is a priori decision and once opened, people move to the closest shelters. Nonetheless, we computed the resulting utilization rates of the shelters in accordance with the allocation made based on the problem assumptions. Table 10 reveals that utilization rates of the solution F is relatively low with respect to stochastic solutions while improves as uncertainty level increases, as expected. When the uncertainty level is the highest, utilization rates of the solution F are reasonably high where stochastic counterparts can not achieve a feasible solution at all.
As a consequence, all these measures clearly show that the solution recommended by the model (RO) is not only feasible for all possible scenarios but also socially more acceptable and preferable than stochastic counterparts in terms of fairness and accessibility.
The robust model (RO) proposes opening more shelters than the stochastic model to be on the “safe” side, in return for a decrease in the utilization rate. Conversely, there exists a trade-off between the feasibility and the utilization rate of a solution. In other words, as the feasibility percentage of the solution increases, the utilization rate decreases. In this regard, this trade-off for the robust solution F is visualized in Fig. 5 for different robustness levels. Being a robust solution, solution F has enough capacity to meet the shelter demand requirements of all scenarios for the highest uncertainty \((\tau =1)\) with a mean utilization rate of \(72\%\), however, as the robustness level decreases, utilization rate decreases to a mean level of \(57\%\) for \(\tau =0.5\) and to a mean level of \(42\%\) for \(\tau =0\). Moreover, as the earthquake scenario worsens (i.e., the intensity of the earthquake increases), the feasibility percentage of the solution decreases while the utilization rate increases due to an increase in shelter demand.

Trade-off between the feasibility and utilization percentages of solution F for different robustness levels with respect to different scenarios
4.1.4 Summary of the computational study for the Kartal district
In this subsection, we highlight the main findings of the computational study conducted for the Kartal district. Firstly, we would like to emphasize that the computational study does not assert that the robust optimization approach always outperforms the stochastic optimization approach. The proposed robust model is preferable when a reliable information on the probability distribution of the uncertain parameter (i.e., the intensity of the earthquake) is not available and/or a strongly credible performance is sought without facing infeasible solutions and high regrets even in extreme scenarios. In the computational study, we aim to show that robust model can outperform the stochastic optimization approach in such cases. In this regard, the main findings can be summarized as follows:
-
(i) As uncertainty in shelter demand (in other words the robustness of the model) increases, the model (RO) obtains feasible solutions for higher \(\beta \) values due to the increase in shelter demand of each district.
-
(ii) Among 19 distinct solutions generated by the model (RO) with respect to different \(\beta \) and \(\tau \) values, the solution F has the maximum frequency. Moreover, this solution meets relatively higher shelter utilization threshold requirements and achieves the maximum objective function value observed among all solutions.
-
(iii) Stochastic optimization solutions can not generate a feasible allocation of demands to the open shelters for none of the scenarios when \(\tau =1.0\), and for 19 scenarios out of 21 when \(\tau =0.5\). For the nominal demand case where \(\tau =0\), none of the solutions meets the capacity demands of scenarios 12 through 21. The infeasibility mainly stems from the lack of enough capacity to meet the demand, while there are a few cases where a feasible allocation can not be made in accordance with problem assumptions even though the total capacity of open shelters are enough to cover the total demand.
-
(iv) In terms of the fairness performance measure, the solution F outperforms all stochastic solutions but solutions AS and DS, while the objective function values of solutions F and DS are the same. This result shows that the robust solution F not only yields a feasible solution for all possible earthquake scenarios but also provides fair solutions for people that are in need of shelter by opening high quality shelters.
-
(v) When we consider the accessibility performance measure, we observe that the solution F outperforms all stochastic solutions by enabling the minimum mean walking distances for all scenarios.
-
(vi) Mean utilization rates of the solution F is relatively low with respect to stochastic solutions, while improving as the uncertainty level increases. When the uncertainty level is the highest, the utilization rates of the solution F are reasonably high where stochastic counterparts can not achieve a feasible solution at all.
4.2 Computational study for the Anatolian side of Istanbul
In an effort to present the behavior of our model on a large-scale example, we consider the data which corresponds to the whole Anatolian side of Istanbul. This side is the part of Istanbul which lies in the Asia continent. The instance data consists of 230 candidate shelter locations and 270 sub-districts of 12 districts. The population of sub-districts varies between 339 and 72,907. The average and individual district PAR quantities calculated for each scenario \(s \in S\) are displayed in Fig. 6. The figure reveals that the average PAR values for the Anatolian case vary between \(4.99\%\) to \(16.67\%\). Similar to the Kartal case, for a given scenario, there is high variability among sub-district values due to their different proximities to the North Anatolian fault line. For example, considering scenario 21, the the sub-district Hacı Kasım located in Şile (the northmost district of Istanbul) has an individual \(PAR=9.50\%\), whereas the the sub-district Cami located in Tuzla (the southmost district of Istanbul) has an individual \(PAR=21.61\%\). All information, e.g. population, shelter area weights, distances, PAR values and affected population for each district, etc. can be made available upon request to the corresponding author.

PAR values calculated for all 21 scenarios and 270 districts of the whole Anatolian side of Istanbul. Solid lines with circles represent PAR quantities averaged over all districts. Small circles represent PAR value of each individual district. The dashed and dotted lines display the minimum and maximum PAR values among the 270 districts, respectively
Considering the enormous size of the model (RO) formulation in terms of number of constraints (1,319,661) and decision variables (1,304,332), we first experimented using three alternative closest assignment constraint sets, namely, constraints (2f)–(2g), (3), and (4) on the model (DO) in order to observe their computing time efficiencies. The CPU times required to solve the Anatolian side instance with the model (DO) with each of these constraints are given in Table 11. As seen from this table, constraints (4) proposed by Berman et al. (2009) provides an improvement of 30% over constraints (3) and 91% over constraints (2f)-(2g) in terms of CPU time. Hence, in our case study-2 experiments we incorporated constraint set (4) to the models (DO) and (RO) as the closest assignment constraints.
For the (RO) approach, we relaxed the utilization constraints and solved the model considering 21 scenarios by ignoring the uncertainty, i.e. \(\beta =0\) and \(\tau =0\). Our model obtained the optimal solution in 833.61 hours (34.7 days) of CPU time. Due to this excessive time, we solved the model (RO) only for a single parameter combination. The solution recommended opening 43 shelters and yielded an objective function value of 0.702316, i.e., the minimum weight among all open shelters. The details of our solution are reported in Table 12.
Since we do not enforce minimum utilization rates for open shelters, we observe that the mean and maximum utilization figures of shelters over 21 scenarios are relatively small, as expected. The minimum of mean and maximum utilization figures belong to shelter 138 (indicated in bold in Table 12) which also determines the objective function value. When we examine the utilization rates of all open shelters in 21 scenarios, we see that the rates increase with demand, as shown in Fig. 7. For the worst case scenario (scenario 21) shelters 50 and 72 are utilized at rate 0.99, being the maximum among all open shelters.

Mean and maximum utilization rates of open shelters in 21 scenarios for the whole Anatolian side of Istanbul
Kınay et al. (2018) solved the same problem instance by applying a low variability to the demand while keeping \(\beta =0\) and setting \(PAR=12.5\%\). Hence, they relaxed the minimum utilization threshold constraint. Under these assumptions, their solution yielded an objective function value of 0.781146 by opening 26 shelters. In the same fashion, we compared the solution of the model (RO) with stochastic optimization solution of Kınay et al. (2018) (hereafter (SO)) in terms of fairness, accessibility, satisfaction, and mean utilization rate measures. Similarly, we take the nominal demand values of 21 scenarios of the Anatolian side instance as the omniscient cases and conducted a posteriori analysis where optimal allocations are made in compliance with the problem assumptions for a given set of open shelters yielded by the solutions. The resulting performance measures are given in Table 13.
Table 13 depicts that, although the total capacity of open shelters is adequate to cover the total demand of districts, the (SO) approach is not capable of providing feasible allocations for scenarios 12 through 21 (as can be seen in the satisfaction column). This stems from the fact that, problem constraints such as closest assignment and the indivisibility of district demands make it impossible to find a feasible allocation for the scenario. Conversely, the (RO) yields feasible solutions for all scenarios. In terms of fairness measure, the (SO) outperforms the (RO) by a small margin, which we consider admissible. Accessibility measure reveals that under the solution (RO), people walk approximately 0.6 km. less than those subjected to the solution (SO). As emphasized previously, this performance measure is particularly important in the post-earthquake phase. As expected, mean utilization rates of the model (RO) are relatively low with respect to those of (SO) while they improve for more demanding scenarios in which the (SO) does not even yield a feasible solution. Consequently, the comparison analysis for the Anatolian case of Istanbul promotes our previous conclusion that the solutions yielded by the model (RO) are not only feasible for all possible scenarios but also socially acceptable and preferable.
4.3 Managerial insights
Our computational studies for the Kartal district and Anatolian side of Istanbul also provide managerial insights and a valuable decision support to the decision-makers in terms of observing the consequences of adapting particular solutions once different earthquake scenarios are realized. Significant managerial insights that can be derived from our computational studies are summarized below:
-
(i) A successful pre-disaster management plan should prioritize the society benefit by considering the expected results of all possible scenarios. In other words, although an optimal plan which accounts for the worst-case may suggest opening more shelters (which potentially yields additional cost), as it is mostly observed in robust approaches, it is often the socially acceptable or socially preferable course of action.
-
(ii) The uncertainty in demand should be quantified via realistic estimation methods which consider the dynamics of the earthquake. To that end, assuming an empirical probability distribution which does not properly represent the variation associated with the uncertain parameters may lead to solutions that are socially not acceptable or preferable and cause high regrets, which can not be compensated after the disaster occurs.
-
(iii) Although stochastic programming implementations in disaster relief studies can successfully incorporate uncertainties by minimizing an expected cost over multiple scenarios, they neglect the impact of individual scenarios, which can lead to large relative regret and cast doubt on the overall network robustness.
-
(iv) Although optimal solutions are generated with respect to the objective function under consideration, other performance measures (such as accessibility and utilization) that might provide different perspectives for comparing alternative solutions should also be taken into account.
-
(v) Solving the robust model (RO) for different robustness levels and utilization rates provides a holistic decision support to the decision-maker in terms of comparing multiple solutions generated by the model. Conversely, within this analysis, taking into account the most frequently opened shelters provides insight regarding the fitness of a shelter in terms of being part of a good solution.
-
(vi) The robust model (RO) proposes opening more shelters than the stochastic model to be on the safe side, in return for a decrease in the utilization rate. As our computational study reveals, there exists a trade-off between the feasibility and the utilization rate of a solution for different robustness levels. Hence, when comparing alternative solutions, these trade-offs can provide efficient decision support to the decision-maker.
-
(vii) If there exists no further information regarding the uncertainty levels (\(\tau _s\)) of particular scenarios, it would be a good practice to assume the same uncertainty levels in all scenarios.
5 Conclusion and future work
In this study, we consider the shelter area location and allocation problem for an earthquake disaster for the case of Istanbul, Turkey. The most challenging aspects of this problem are the uncertainty in the intensity and the different exposure levels of vulnerability for districts in the affected area, which directly determine the number of affected people requiring shelter in the aftermath of a disastrous earthquake. Being part of the disaster management operations that aim to improve the preparedness level and mitigate human suffering, shelter location and allocation decisions should be robust to uncertainties associated with earthquake disasters. Hence, in this research, we aim to improve the disaster preparedness level by developing a robust optimization model for this problem.
Our computational experiments and comparison analyses clearly showed that the solutions yielded by the model (RO) are not only feasible for all possible scenarios but also socially more acceptable and preferable than the deterministic and stochastic counterparts in terms of fairness and accessibility. As a result, the robust optimization approach allows us to hedge against uncertainty more efficiently and lead to better solutions by reducing possible regret, which cannot be compensated after an earthquake.
We can briefly summarize the contributions of our study as follows: First, we utilize basic seismology theory and results from empirical studies for determining realistic shelter demands after a possible earthquake. At this step, we build our demand prediction methodology on the fact that the number of affected people requiring shelter depends on seismic parameters that quantify the intensity of an earthquake and the exposure level of the urban vulnerability (i.e. population, distance to the ruptured fault line, quality of the infrastructure systems). Second, rather than relying on unverified and theoretical parametric probability distributions for addressing uncertainty in demand for shelter sites, we attempt to quantify the uncertainty via seismic parameters. In order to take into account the uncertainty in demand, our (RO) model utilizes distribution-free uncertainty sets that are dictated by the seismology science. Hence, instead of adopting unrealistic assumptions which cannot be verified with empirical data particularly in the context of humanitarian logistics, we allow uncertain parameters to vary in predefined ranges in each scenario while controlling the level of conservatism of the parameters. Additionally, we implicitly capture the notion of evacuation decisions by enforcing the closest assignment constraints. Finally, we believe that the robust modelling approach for planning such extraordinary or emergency service facilities is a socially preferable approach that constitutes the key step in the transition from private to public sector models.
There are two aspects of the problem that can be addressed as future work. One research direction is the objective function. The objective functions adopted in the three models ((DO), (SO), and (RO)) maximize the minimum weight of open shelters. This particular objective function was first used by Kılcı et al. (2015) and later by Kınay et al. (2018) because the main aim of these studies was to provide decision support to the Turkish Red Crescent which seeks for a solution that maximizes the minimum weight of open shelters. It is evident that this objective function is not versatile enough to reflect different aspects of humanitarian relief logistics such as deprivation costs (i.e., distance from shelters to hospitals or main roads, walking distance from districts to shelters) or supply and medical equipment shortages. Therefore, a future study may consider implementing alternative objective functions that allow diversified solutions and consider different aspects of humanitarian relief logistics.
Another research direction of this study would be to develop a heuristic algorithm to solve the model (RO) for large scale instances such as Anatolian side of Istanbul case. Considering the enormous size of such problems, efficient heuristics can be utilized to obtain solutions with reasonable computation times.
References
AFAD. (2018). Interactive web application for Turkey earthquake hazard maps (Türkiye deprem tehlike haritaları İnteraktif web uygulaması-TDTH). https://tdth.afad.gov.tr/TDTH/main.xhtml. Retrieved December 2, 2019.
Alçada-Almeida, L., Tralhao, L., Santos, L., & Coutinho-Rodrigues, J. (2009). A multiobjective approach to locate emergency shelters and identify evacuation routes in urban areas. Geographical Analysis, 41(1), 9–29.
Ansal, A., Akinci, A., Cultrera, G., Erdik, M., Pessina, V., Tönük, G., & Ameri, G. (2009). Loss estimation in Istanbul based on deterministic earthquake scenarios of the Marmara Sea region (Turkey). Soil Dynamics and Earthquake Engineering, 29(4), 699–709.
Bayram, V., & Yaman, H. (2018). Shelter location and evacuation route assignment under uncertainty: A benders decomposition approach. Transportation Science, 52(2), 416–436.
Bayram, V., & Yaman, H. (2018). A stochastic programming approach for shelter location and evacuation planning. RAIRO-Operations Research, 52(3), 779–805.
Bayram, V., Tansel, B. Ç., & Yaman, H. (2015). Compromising system and user interests in shelter location and evacuation planning. Transportation Research Part B: Methodological, 72, 146–163.
Ben-Tal, A., Do Chung, B., Mandala, S. R., & Yao, T. (2011). Robust optimization for emergency logistics planning: Risk mitigation in humanitarian relief supply chains. Transportation Research Part B: Methodological, 45(8), 1177–1189.
Bendimerad, F., Johnson, L., Coburn, A., Rahnama, M., & Morrow, G. (2000). Event report, Kocaeli, Turkey earthquake. RMS reconnaissance team.
Berman, O., Drezner, Z., Tamir, A., & Wesolowsky, G. O. (2009). Optimal location with equitable loads. Annals of Operations Research, 167(1), 307–325.
Bertsimas, D., & Sim, M. (2003). Robust discrete optimization and network flows. Mathematical Programming, 98(1–3), 49–71.
Bertsimas, D., & Sim, M. (2004). The price of robustness. Operations Research, 52(1), 35–53.
Bertsimas, D., & Thiele, A. (2006). Robust and data-driven optimization: modern decision making under uncertainty. In: Models, methods, and applications for innovative decision making, INFORMS (pp. 95–122).
Boonmee, C., Naotaka, I., Takumi, A., & Mikiharu, A. (2016). Multi-model optimization for shelter-site selection: A case study in Banta municipality, Thailand. Proc of Infrastructure Planning in Japan Society of Civil Engineers, 53, 2175–2181.
Chanta, S., & Sangsawang, O. (2012). Shelter-site selection during flood disaster. Lecture Notes in Management Science, 4, 282–288.
Chen, Z., Chen, X., Li, Q., & Chen, J. (2013). The temporal hierarchy of shelters: A hierarchical location model for earthquake-shelter planning. International Journal of Geographical Information Science, 27(8), 1612–1630.
Coutinho-Rodrigues, J., Tralhão, L., & Alçada-Almeida, L. (2012). Solving a location-routing problem with a multiobjective approach: The design of urban evacuation plans. Journal of Transport Geography, 22, 206–218.
De Haen, H., & Hemrich, G. (2007). The economics of natural disasters: Implications and challenges for food security. Agricultural Economics, 37, 31–45.
Dembo, R. S. (1991). Scenario optimization. Annals of Operations Research, 30(1), 63–80.
Du, J., Ji, Y., Qu, D., Wu, X., & Yang, D. (2020). Three-stage mixed integer robust optimization model applied to humanitarian emergency logistics by considering secondary disasters. IEEE Access, 8, 223255–223270.
Erdik, M., & Eren, K. (1983). Attenuation of intensities for earthquake associated with the North Anatolian fault. Technical Report: Middle East Technical University Earthquake Engineering Research Center, Ankara.
Ergun, O., Karakus, G., Keskinocak, P., Swann, J., & Villarreal, M. (2010). Operations research to improve disaster supply chain management. Wiley encyclopedia of operations research and management science.
Erişkin, L. (2021). Point coverage with heterogeneous sensor networks: A robust optimization approach under target location uncertainty. Computer Networks, 198, 108416.
Espejo, I., Marín, A., & Rodríguez-Chía, A. M. (2012). Closest assignment constraints in discrete location problems. European Journal of Operational Research, 219(1), 49–58.
Farahani, R. Z., Lotfi, M., Baghaian, A., Ruiz, R., & Rezapour, S. (2020). Mass casualty management in disaster scene: A systematic review of or & MS research in humanitarian operations. European Journal of Operational Research.
Fritz,. (2005). Logistics and the effective delivery of humanitarian relief. http://www.fritzinstitute.org/PDFs/Programs/tsunamiLogistics0605.pdf. Retrieved December 6, 2019.
GAMS. (2012). Release 24.0.1. GAMS Development Corporation, Washington, DC, USA.
Garnder, J., & Knopoff, L. (1974). Bulletin of the seismological society of America. Bulletin of the Seismological Society of America, 64(5), 1271–1302.
Haghi, M., Ghomi, S. M. T. F., & Jolai, F. (2017). Developing a robust multi-objective model for pre/post disaster times under uncertainty in demand and resource. Journal of Cleaner Production, 154, 188–202.
IMM. (2003). Earthquake Master Plan for Istanbul. Istanbul Metropolitan Municipality (IMM), Directorate of Soil and Earthquake.
IMM. (2009a). Possible Earthquake Lost Predictions for Istanbul. Istanbul Metropolitan Municipality (IMM), Directorate of Soil and Earthquake.
IMM. (2009). An update on the Possible Earthquake Lost Predictions for Istanbul (Istanbul Earthquake Scenario). Istanbul Metropolitan Municipality (IMM), Directorate of Soil and Earthquake: Executive Summary.
JICA. (2002). The Study on A Disaster Prevention/Mitigation Basic Plan in Istanbul including Seismic Micronization in the Republic of Turkey. Istanbul Metropolitan Municipality (IMM) and Japan International Cooperation Agency (JICA).
Jonkman, S. N., Lentz, A., & Vrijling, J. (2010). A general approach for the estimation of loss of life due to natural and technological disasters. Reliability Engineering & System Safety, 95(11), 1123–1133.
Kalkan, E., Gülkan, P., Öztürk, N. Y., & Çelebı, M. (2008). Seismic hazard in the Istanbul metropolitan area: A preliminary re-evaluation. Journal of Earthquake Engineering, 12(S2), 151–164.
Kamyabniya, A., Noormohammadzadeh, Z., Sauré, A., & Patrick, J. (2021). A robust integrated logistics model for age-based multi-group platelets in disaster relief operations. Transportation Research Part E: Logistics and Transportation Review, 152, 102371.
Kılcı, F., Kara, B. Y., & Bozkaya, B. (2015). Locating temporary shelter areas after an earthquake: A case for tTurkey. European Journal of Operational Research, 243(1), 323–332.
Kınay, Ö. B., Kara, B. Y., Saldanha-da Gama, F., & Correia, I. (2018). Modeling the shelter site location problem using chance constraints: A case study for Istanbul. European Journal of Operational Research, 270(1), 132–145.
Kınay, Ö. B., Saldanha-da Gama, F., & Kara, B. Y. (2019). On multi-criteria chance-constrained capacitated single-source discrete facility location problems. Omega, 83, 107–122.
Kongsomsaksakul, S., Yang, C., & Chen, A. (2005). Shelter location-allocation model for flood evacuation planning. Journal of the Eastern Asia Society for Transportation Studies, 6, 4237–4252.
Koramaz, E. K., Koramaz, T. K., & Özer, Ö. (2018). Urban transformation through property-led regeneration: A case of building renewals in Istanbul.
Kovács, G., & Spens, K. M. (2007). Humanitarian logistics in disaster relief operations. International Journal of Physical Distribution & Logistics Management, 37(2), 99–114.
Kulshrestha, A., Wu, D., Lou, Y., & Yin, Y. (2011). Robust shelter locations for evacuation planning with demand uncertainty. Journal of Transportation Safety & Security, 3(4), 272–288.
Laguna, M. (1998). Applying robust optimization to capacity expansion of one location in telecommunications with demand uncertainty. Management Science, 44(11–part–2), S101–S110.
Li, A. C., Nozick, L., Xu, N., & Davidson, R. (2012). Shelter location and transportation planning under hurricane conditions. Transportation Research Part E: Logistics and Transportation Review, 48(4), 715–729.
Li, L., Jin, M., & Zhang, L. (2011). Sheltering network planning and management with a case in the gulf coast region. International Journal of Production Economics, 131(2), 431–440.
Li, Y., Zhang, J., & Yu, G. (2020). A scenario-based hybrid robust and stochastic approach for joint planning of relief logistics and casualty distribution considering secondary disasters. Transportation Research Part E: Logistics and Transportation Review, 141, 102029.
Liu, Q., Ruan, X., & Shi, P. (2011). Selection of emergency shelter sites for seismic disasters in mountainous regions: Lessons from the 2008 Wenchuan MS 8.0 earthquake, China. Journal of Asian Earth Sciences, 40(4), 926–934.
Liu, Y., Lei, H., Zhang, D., & Wu, Z. (2018). Robust optimization for relief logistics planning under uncertainties in demand and transportation time. Applied Mathematical Modelling, 55, 262–280.
Lu, C. C. (2013). Robust weighted vertex p-center model considering uncertain data: An application to emergency management. European Journal of Operational Research, 230(1), 113–121.
Medvedev, S., & Sponheuer, W. (1969). Scale of seismic intensity. In Proceedings of IV World conference of the earthquake engineering, Santiago, Chile, A-2 (pp 143–153).
Mulvey, J. M., Vanderbei, R. J., & Zenios, S. A. (1995). Robust optimization of large-scale systems. Operations Research, 43(2), 264–281.
Murru, M., Akinci, A., Falcone, G., Pucci, S., Console, R., & Parsons, T. (2016). \(\text{ M }\ge 7\) earthquake rupture forecast and time-dependent probability for the sea of Marmara region, Turkey. Journal of Geophysical Research: Solid Earth, 121(4), 2679–2707.
Najafi, M., Eshghi, K., & Dullaert, W. (2013). A multi-objective robust optimization model for logistics planning in the earthquake response phase. Transportation Research Part E: Logistics and Transportation Review, 49(1), 217–249.
Najafi, M., Eshghi, S., & Eshghi, K. (2020). A framework for earthquake emergency response in Iran. Scientia Iranica, 27(5), 2604–2620.
Neal, D. M. (1997). Reconsidering the phases of disasters. International Journal of Mass Emergencies and Disasters, 15(2), 239–264.
Ozbay, E., Çavuş, Ö., & Kara, B. Y. (2019). Shelter site location under multi-hazard scenarios. Computers & Operations Research, 106, 102–118.
Özmen, B. (2000). 17 Ağustos 1999 İzmit Körfezi Depreminin Hasar Durumu (rakamsal verilerle), TDV/DR 010-53.
Özmen, B. (2002). Istanbul ili için deprem senaryosu (Earthquake scenario for Istanbul). Türkiye Mühendislik Haberleri, 427, 23–28.
Pan, A. (2010). The applications of maximal covering model in typhoon emergency shelter location problem. In 2010 IEEE international conference on industrial engineering and engineering management, IEEE (pp. 1727–1731).
Parsons, T. (2004). Recalculated probability of \(\text{ m }\ge 7\) earthquakes beneath the sea of marmara, turkey. Journal of Geophysical Research: Solid Earth 109(B5).
Paul, J. A., & Wang, X. J. (2019). Robust location–allocation network design for earthquake preparedness. Transportation Research Part B: Methodological, 119, 139–155.
Pettit, S. J., Beresford, A. K. C., Whiting, M., & Banomyong, R. (2011). The 2004 Thailand tsunami reviewed: lessons learned. Meeting the challenge of preparing for and responding to disasters. In M. C. P. Tatham (Ed.), Humanitarian logistics (pp. 103–119). Kogan Page, London.
Pyper Griffiths, J. H., Irfanoglu, A., & Pujol, S. (2007). Istanbul at the threshold: An evaluation of the seismic risk in Istanbul. Earthquake Spectra, 23(1), 63–75.
R Core Team. (2017). R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing, Vienna, Austria. https://www.R-project.org/.
Revelle, C., Marks, D., & Liebman, J. C. (1970). An analysis of private and public sector location models. Management Science, 16(11), 692–707.
Richter, C. F. (1935). An instrumental earthquake magnitude scale. Bulletin of the seismological society of America, 25(1), 1–32.
Rockafellar, R. T., & Wets, R. J. B. (1991). Scenarios and policy aggregation in optimization under uncertainty. Mathematics of Operations Research, 16(1), 119–147.
Rojeski, P., & ReVelle, C. (1970). Central facilities location under an investment constraint. Geographical Analysis, 2(4), 343–360.
Song, S., Zhou, H., & Song, W. (2019). Sustainable shelter-site selection under uncertainty: A rough qualiflex method. Computers & Industrial Engineering, 128, 371–386.
Tatham, P., & Christopher, M. (2018). Humanitarian logistics: Meeting the challenge of preparing for and responding to disasters. Kogan Page Publishers.
Thomas, A. S., & Kopczak, L. R. (2005). From logistics to supply chain management: The path forward in the humanitarian sector. Fritz Institute, 15, 1–15.
Trivedi, A., & Singh, A. (2017). A hybrid multi-objective decision model for emergency shelter location-relocation projects using fuzzy analytic hierarchy process and goal programming approach. International Journal of Project Management, 35(5), 827–840.
Trivedi, A., & Singh, A. (2019). Shelter planning for uncertain seismic hazards using multicriteria decision approach: A case of Nepal earthquake. Journal of Multi-Criteria Decision Analysis, 26(3–4), 99–111.
Trivedi, A., & Singh, A. (2020). A multi-objective approach for locating temporary shelters under damage uncertainty. International Journal of Operational Research, 38(1), 31–48.
Unal, G. (2010). A mathematical model based decision support system for emergency operations. Ph.D. thesis, Turkish Military Academy Defense Sciences Institutes.
Wagner, J., & Falkson, L. (1975). The optimal nodal location of public facilities with price-sensitive demand. Geographical Analysis, 7(1), 69–83.
Wei, L., Li, W., Li, K., Liu, H., & Cheng, L. (2012). Decision support for urban shelter locations based on covering model. Procedia Engineering, 43, 59–64.
Xu, J., Yin, X., Chen, D., An, J., & Nie, G. (2016). Multi-criteria location model of earthquake evacuation shelters to aid in urban planning. International Journal of Disaster Risk Reduction, 20, 51–62.
Yahyaei, M., & Bozorgi-Amiri, A. (2019). Robust reliable humanitarian relief network design: An integration of shelter and supply facility location. Annals of Operations Research, 283(1), 897–916.
Acknowledgements
This work was supported by the Scientific and Technological Research Council of Turkey (TÜBİTAK), Grant #: 121M850.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Disclaimer
The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of any affiliated organization or government.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Eriskin, L., Karatas, M. Applying robust optimization to the shelter location–allocation problem: a case study for Istanbul. Ann Oper Res 339, 1589–1635 (2024). https://doi.org/10.1007/s10479-022-04627-1
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10479-022-04627-1