
Abstract
Sports-related traumatic brain injuries (TBIs) are among the leading causes of head injuries in the world. Use of helmets is the main protective measure against this epidemic. The design criteria for the majority of the helmets often only consider the kinematics of the head. This approach neglects the importance of regional deformations of the brain especially near the deep white matter structures such as the corpus callosum (CC) which have been implicated in mTBI studies. In this work, we develop a dynamical reduced-order model of the skull-brain-helmet system to analyze the effect of various helmet parameters on the dynamics of the head and CC. Here, we show that the optimal head–helmet coupling values that minimize the CC dynamics are different from the ones that minimize the skull and brain dynamics (at some kinematics, up to two times stiffer for the head motion mitigation). By comparing our results with experimental impact tests performed on seven different helmets for five different sports, we found that the football helmets with an absorption of about 65–75% of the impact energy had the best performance in mitigating the head motion. Here, we found that none of the helmets are effective in protecting the CC from harmful impact energies. Our computational results reveal that the origin of the difference between the properties of a helmet mitigating the CC motion vs. the head motion is nonlinear vs. linear dynamics. Unlike the globally linear behavior of the head dynamics, we demonstrate that the CC exhibits nonlinear mechanical response similar to an energy sink. This means that there are scenarios where, at the instant of impact, the CC does not undergo extreme motions, but these may occur with a time delay as it absorbs shock energy from other parts of the brain. These findings hint at the importance of considering tissue level dynamics in designing new helmets.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
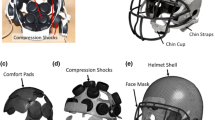
It is estimated that 3.8 million people suffer from sports-related mild traumatic brain injury (mTBI) in the U.S. alone.25,37 This number might be 50% higher since many mTBIs still go uncounted due to the confluence of under-awareness, under-reporting, and misdiagnosis.11,25 The main protective measure against this epidemic is the use of helmets.27 Over the years, similar approaches have been employed in helmet designs to combat mTBIs and have consistently utilized similar, if not identical, materials. The helmets are generally constructed of an outer shell and an inner liner. While the shell is important to prevent skull fracture, the liner is the main contributor to the mitigation of mTBI.50 Traditional expanded polystyrene (EPS) and expanded polypropylene (EPP) liners are primarily designed and manufactured to reduce linear and rotational accelerations, which greatly affect the head motion during direct collisions.10,17,40,44 These types of liners have long been considered in standard helmet design because of their effectiveness in limiting the risk of skull fracture, penetrating injury, and brain injury.2,24 Other materials that are commonly used in helmet design include, but are not limited to, vinyl nitrile (VN) foam,4 polyurethane (PU) foam,45 and collapsible air chambers.33 In addition to the liner, in some helmets another layer is added to specifically optimize the rotation-damping systems by mitigating rotational acceleration.8 These rotation-damping systems include spherical slip interfaces and collapsible and expandable structures.8,10 In bicycle and ski helmets, for instance, Multi-directional Impact Protection System (MIPS) is a relatively new design concept.8 MIPS introduces a thin, low friction layer between the liner and the wearer’s head and aims to mitigate rotational impact forces by allowing the helmet and head to slide during an impact.8 WaveCel is another new technology that has been used in these helmets and has been shown to reduce the rotational acceleration after an impact.10 It employs a collapsible honeycomb structure attached to the EPS liner and seeks to reduce the shear stiffness of the helmet resulting in reduced rotational acceleration.10,24 What these helmets have in common is that they are designed to reduce the head kinematics-based parameters such as linear and rotational accelerations experienced after a head impact. However, recent studies have shown that mitigating head kinematics alone is not the best method to alleviate mTBI.26 Various experimental and computational studies have shown the importance of deep regions of the brain such as corpus callosum (CC) in mTBI pathology.1,26,34,39,41,57 Therefore, special attention to this region is necessary for the design of a better helmet.
Many scientists have taken advantage of the recent advances in imaging techniques and hypothesized that axonal injuries are one of the main contributors of mTBI.5,52 Observing large strains in brain regions with a high density of axonal fibers in mTBI patients further corroborates this hypothesis.32,51 New finite element (FE) models of the brain have also incorporated white matter axonal fibers into their models for better prediction of TBI and the assessment axonal fiber strain as a potential tissue-based injury metric.21,55 CC is one such fiber tract that has often been implicated in mTBI pathology.26,31 Analysis of the dynamics of the brain tissue after an impact has revealed evidence of localized modes35 and strain concentration near CC.1,23 Peak principal strain in CC has also been shown to be the best predictor of mTBI as a result of a head impact.26
Improving helmet designs based on FE simulations of the brain substructure responses rather than head kinematics is a naturally important next step in the process of designing helmets. Satisfying the FE-based helmet design criteria through brute-force simulations, however, is computationally demanding, and performing parameter studies can be computationally more costly.21,56 This raises the need for fast computational models of the brain. One way to address this is through development of new injury metrics based on reduced-order models of the brain.19,36 Diffuse Axonal Multi-Axis General Evaluation (DAMAGE) is one of such injury models that uses a second-order mechanical system (mimicking the brain deformation) to predict the maximum brain strain using rotational acceleration time-histories from a head impact.19 Mojahed et al.41 recently created a dynamical reduced-order model of the human brain which especially focuses on the dynamics of the brain hemispheres and the CC. Their proposed reduced-order model (ROM) is an 8 degree-of-freedom (DOF), i.e., 8 coupled second-order ordinary differential equations (ODEs). This is unlike the FE models which typically possess thousands/millions of degrees of freedom, which makes them significantly slower than the proposed 8 DOF reduced-order model. The significant speedup of the proposed ROM comes at the expense of it not being able to predict the stress fields, displacement fields, etc. corresponding to all the brain substructures in all planes of motion. This, however, is not the goal of the proposed ROM. Its goal is to, by design, predict the displacement/angle of the brain hemispheres and the CC in the coronal plane. Their study and their model showed that the CC behaves nonlinearly owing to its specific geometry.
What these ROMs currently lack is the inclusion of skull and helmet in their models. In this study, we use our previously developed reduced-order model of the human brain and further extend it by adding models of the skull (head) and helmet. Through basic elasticity theory, we represent the helmet-head coupling by a linear torsional damper and spring. Then, we consider the maximum strain (i.e., relative angular displacement) of the CC as a kinematic criterion which we aim to minimize by changing the helmet design parameters, i.e., head–helmet coupling for impulsive excitations with different amplitudes and durations. As a baseline for comparison, we perform the same parameter study to minimize the maximum deformation of the head. Furthermore, we superimpose the impact applied to a National Operating Committee on Standards for Athletic Equipment (NOCSAE) headform mounted on a Hybrid III neck, protected by seven different helmets from five different sports. With this, we show that most of the helmets studied in this article are designed to minimize the motion of the head, rather than the motion of the brain or its substructures.
Methods
Reduced-Order Model of the Human Head and Helmet in the Coronal Plane
We begin this section by recalling the dynamical reduced-order model (ROM) of the human brain, modeling the dynamics (response) of the hemispheres and the CC when the skull is subjected to rotational impact-like excitation in the coronal plane. For the purpose of this work, we add to the currently existing model of the human brain additional degrees of freedom to represent the human skull and a helmet protecting the skull-brain system. In the augmented ROM, the brain hemispheres are linearly coupled to the model of the skull (with a mass moment of inertia of \({I}_{\text{s}}\)) by a torsional spring-damper model, \({\kappa }_{\text{g}}\), \({\lambda }_{\text{g}}\), as identified in Mojahed et al.41 Furthermore, the helmet (with a mass moment of inertia of \({I}_{\text{h}}\)) is coupled (attached) to the skull (head) by torsional spring-damper pairs (\({\kappa }_{\text{h}}\) and \({\lambda }_{\text{h}}\)), employing linear elastic elements (we refer to the Supplemental Material for a detailed derivation). The skull (head) itself is grounded via a pair of linear torsional spring-dampers, \({\kappa }_{\text{n}}\) and \({\lambda }_{\text{n}}\), which represents a simplified model of the neck,
where \({\mathbf{p}}={\left[M,m,{m}_{\text{p}},{\kappa }_{\text{g}},{\lambda }_{\text{g}},{\kappa }_{\text{p}},{\lambda }_{\text{p}}, {k}_{\text{l}}, {d}_{\text{l}}, {k}_{\text{r}},{d}_{\text{r}},{I}_{\text{s}},{I}_{\text{h}},{\kappa }_{\text{n}},{\lambda }_{\text{n}},{\kappa }_{\text{h}},{\lambda }_{\text{h}}\right]}^{\text{T}}\) is the vector of parameters of the ROM, \({\mathbf{y}}={\left[{\mathbf{z}},{\dot{\mathbf{z}}}\right]}^{\text{T}}\) and \(z={\left[{\theta }_{\text{s}},{r}_{\text{c}},{\theta }_{\text{c}}, {r}_{\text{pr}},{\theta }_{\text{pr}}, {r}_{\text{pl}},{\theta }_{\text{pl}},{r}_{\text{r}},{r}_{\text{l}},{\theta }_{\text{h}}\right]}^{\text{T}}\). Finally, the ROM, the response of which is governed by Eq. (1), is excited by impact-like (half-sine) force excitation with amplitude \(A\) and duration \({t}_{\text{d}}\) (cf. Fig. 1) applied to the helmet.

(a) A representation of skull–brain–helmet model, forced by an impact, \(F\left(t;A,{t}_{\text{d}}\right)\). The masses M and m are reduced models of the brain hemispheres and the CC, respectively. A more detailed representation of the brain reduced-order model is depicted in (b). (b) The reduced-order model the brain (Note: the x–y coordinate system, i.e., the reference coordinate system, is fixed in space). (c) The time series of the impact force, i.e., a half-sine function of amplitude of \(A\) and duration \({t}_{\text{d}}\).
The parameters of the reduced-order model are listed and defined in Table 1. While all the parameters of the brain portion of the ROM, \(\left\{M,m,{m}_{\text{p}},{\kappa }_{\text{g}},{\lambda }_{\text{g}},{\kappa }_{\text{p}},{\lambda }_{\text{p}}, {k}_{\text{l}}, {d}_{\text{l}}, {k}_{\text{r}},{d}_{\text{r}}\right\}\), are identified in earlier work,41 the skull grounding (neck) parameters, \(\left\{{\kappa }_{\text{n}},{\lambda }_{\text{n}}\right\}\), remain to be identified. The helmet-skull coupling parameters, however, do not need to be exactly identified, since we will be performing a parameter study on \({\kappa }_{\text{h}}\) and \({\lambda }_{\text{h}}\) in the next section. The details of the skull grounding (neck) parameter identification are explained in the Supplemental Material.
Helmet–Head Coupling Parameter Optimization Method and Criteria
To this end, we created a reduced-order model of the human head with a helmet coupled to it. We excite the head–brain–helmet by a half-sine force impact applied to the helmet with an amplitude of \(A\) and duration of \({t}_{\text{d}}\). For the purpose of studying the effect of head–helmet coupling on the dynamics of the head and substructures of the brain, we consider a range of helmet-head coupling stiffnesses at each excitation level (each \(A\) and \({t}_{\text{d}}\)) and then record the maximum motion of the CC and the head:
where \(\theta\) and \(\omega\) are the angle and the angular velocity in the coronal plane of the substructure of interest in the head–brain system. It should be noted that we set the head–helmet coupling damping to \({\lambda }_{\text{h}}=1 \text{Nm}\,{\text{s}}/\text{rad}\), since its effect on the dynamics of the system is trivial, as \({\lambda }_{\text{h}}\) only reduces the maximum strain (maximum angle change) of the head and the brain substructures uniformly (monotonically) as it increases. Hence, we only need to examine the maximum strain of the head and the brain substructures for various values of excitation force amplitude and duration and the linear helmet-head coupling stiffness, \(A\), \({t}_{\text{d}}\) and \({\kappa }_{\text{h}}\). However, for better representation, for each \(A\) and \({t}_{\text{d}}\), we record the \({\kappa }_{\text{h}}\) at which the maximum motion of either the head or the CC is minimized. Next, we are able to plot the optimal value of \({\kappa }_{\text{h}}\), that is, the \({\kappa }_{\text{h}}\) which minimizes the maximum motion (more specifically, angular strain) of the head or the CC, as functions of \(A\) and \({t}_{\text{d}}\).
Experimental Impact Testing of Sports Helmets
Seven commercially available helmets from five different sports consisting of football (two types), ski, hockey, lacrosse, bicycle (two types) were tested in our study. The helmets were tested with an impact pendulum at different impact intensities (corresponding to different arm angles of 30° to 60° with increments of 5°). Each impact was repeated three times to ensure its accuracy and repeatability.
The pendulum frame is 3.40 m × 1.63 m × 2.44 m and is made of hollow square steel tubing. The pendulum arm consists of three hollow square aluminum tubes, two being 0.9 m long, weighing 4.25 kg each, and the third being 1.91 m long, weighing 9.12 kg. The arm is connected to an aluminum cylinder at the top of the frame that is 1.12 m long and 0.1 m in diameter. At the end of the arm is a steel hammerhead form that is 0.13 m in diameter with a weight of 18.5 kg. At the end of the hammer, a flat and rigid nylon impactor face is added to maximize the repeatability and reproducibility of the tests—cf. Fig. 2. The size and weight of the pendulum arm and hammer were designed to replicate the inertia of the average NFL player’s torso.47 Figure 2a illustrates the full impact pendulum and frame fixture, while Figs. 2b–2h show the NOCSAE headform mounted on a Hybrid-III 50th neck protected by the helmets that were tested, i.e., hockey, lacrosse, ski, 2 bicycle, and 2 football helmets.

Experimental fixture and the tested helmets. (a) Impact pendulum experimental fixture. A medium NOCSAE headform mounted on a Hybrid-III 50th male neck, protected by (b) Hockey, (c) Lacrosse, (d) Ski, (e) Bicycle 1, (f) Bicycle 2, (g) Football 1, and (h) Football 2 helmets.
To test these helmets with the impact pendulum, we put them on a medium NOCSAE headform mounted on a Hybrid-III 50th neck using an adaptor plate to ensure correct anatomical geometry.15 The head–neck assembly was then attached on a sliding mass intended to simulate the effect of the mass of the torso during an impact. The implemented sliding mass is a commercially available slide table commonly used for impact testing (Biokinetics, Ottawa, Ontario, Canada). To measure the head kinematics resulting from each impact test, the head model was instrumented with a 6 degree of freedom sensor package (DTS, Seal Beach, CA) consisting of one tri-axial accelerometer (ACC3 PRO) and three angular rate sensors (ARS PRO-8K 2000 Hz).
We use the recorded responses of the head model in the experimental fixture to compute the energy absorption by each of these helmets by the following formula:
where \(j\) represents the helmet under study, \({t}_{\text{I}}\) is the duration of impact and \({\dot{\theta }}_{\text{head}}\) is the angular velocity of the head without any helmet. Figure 3 shows the efficiency of each helmet across a range of impact intensities, \({\theta }_{0}\) (the angle at which the impact hammer is released).

Performance measure of 7 different helmets from five different sports, tested with impact pendulum experiments, using (2). Values represent the percentage of the impact energy absorbed by the head when protected by each helmet. It shows that all of the helmets except for the Ski helmet and Football helmet 1, according to our defined energy absorption measure, are designed to perform efficiently (i.e., absorb most energy) at energy levels corresponding to an impact hammer released at an initial angle of approximately 45°. (The error bars, representing standard deviation, are plotted in black).
Results
Experimental Impact Tests on Different Types of Helmets
We performed impact pendulum tests—seven different impact intensities corresponding to arm angles of 30° to 60° (5° increments)—on seven different helmets. Each impact was repeated three times to ensure its repeatability and accuracy. Figure 3 shows the percentage of energy absorbed by each helmet, compared to the case where the head is not protected by a helmet.
We observed that, except for the Football helmet 1 and Bicycle helmet 2, the rest of the helmets are each designed to minimize the harm due to impact of the head at an intermediate range of impact intensities—i.e., impact intensities corresponding to \({\theta }_{0} \sim 45^\circ\) (Fig. 3). Overall, we found that while the football helmets had the best performance, absorbing approximately 65–75% of the impact energy across different impact intensities, lacrosse and ski helmets had less desirable performance when compared to the other helmets.
Helmet Padding Parameter Study Based on Head, Brain and Corpus Callosum Motions
In this section, we examine the values and the topology of the contour of \({\kappa }_{\text{h}}\) vs. the forcing amplitude \(A\) (which later will be mapped onto the angular acceleration amplitude numerically), and duration \({t}_{\text{d}}\), which minimizes \(\Delta {\omega }_{\text{peak}}\) for the CC and head.
Figures 4a–4c illustrate the optimal values of \({\kappa }_{h}\) which minimize the maximum strain of the CC (\({\kappa }_{\text{h}}^{\text{CC}}\)), the head (\({\kappa }_{\text{h}}^{\text{h}}\)), and the brain (\({\kappa }_{\text{h}}^{\text{b}}\)), respectively, in which the hatched regions in (a), (c) and (d) correspond to scenarios where a nontrivial optimal \({\kappa }_{\text{h}}\) was not found, and the algorithm converged to the trivial minimum, which is an extremely soft helmet-head coupling to avoid transferring energy from helmet to the brain. When comparing (a) and (c) with (b), we observed that, while the optimal \({\kappa }_{\text{h}}\) based on the brain, \({\kappa }_{\text{h}}^{\text{b}}\), and the CC strain, \({\kappa }_{\text{h}}^{\text{CC}}\), are dependent on both the excitation amplitude and duration, the optimal \({\kappa }_{\text{h}}\) based on the head motion, \({\kappa }_{\text{h}}^{\text{h}}\), is only sensitive to the impact duration and not the amplitude (in this context, the word impact refers to the angular acceleration associated with it). Interestingly, the measured optimal \({\kappa }_{\text{h}}\) for these brain regions observed in (a) and (c) topologically align with the iso-strain curves computed by38 implying a physical correspondence between the change of the optimal helmet-head coupling stiffness value as the brain strain level changes. Comparison of the helmet experiment in (a) and (c) with (b) also shows that the current helmet designs, whose kinematics are aligned almost vertically for different impact energies (also see Fig. 6), are either based on linear dynamics assumptions or merely the head motion. We observed that the optimal coupling stiffness value based on minimizing the head strain alone varies linearly with the impact duration and is independent of the impact amplitude (Fig. 4b). This value, however, changes in a nontrivial manner for minimizing the strain in the CC and brain hemisphere and is dependent on both the impact amplitude and the duration (Figs. 4a and 4c). Interestingly, this nontrivial behavior is in accordance and aligned with the iso-strain curves computed by38 as a potential index for mTBI. Additionally, Fig. 4d depicts the ratio between the \({\kappa }_{\text{h}}\) that minimizes the strain in the brain and the optimal coupling stiffness that minimizes the strain in the CC. This contour implies that, generally, a weaker helmet-head coupling (\({\kappa }_{\text{h}}\)) is required to minimize the CC strain compared to the \({\kappa }_{h}\) needed to minimize the strain in the brain. When the impact experiments on different helmets are overlaid on these figures, we observed that almost all of the helmets follow the same trend as in Fig. 4b, which shows that the current helmet designs only aim to mitigate the head kinematics rather than the brain deformation (Fig. 6). A feature of the contour of Fig. 4d is that, for a certain range of impact amplitudes and durations, it possesses higher values (bright regions); however, in other regions, it exhibits lower values (gray and darker regions). The former implies that significantly softer \({\kappa }_{\text{h}}\) is required to minimize the maximum strain in the CC compared to that needed to minimize the maximum strain in the brain. The latter implies that similar values of \({\kappa }_{\text{h}}\) are needed to minimize the maximum strain of either the CC or the brain. This calls for a closer look at these regions. To do so, we selected two points in Figs. 4a and 4d: case I: \({A}_{\text{acc}}=365.2 \text{rad}/{\text{s}}^{2}\), \({t}_{\text{d}}=16.5 \text{ms}\), \({\kappa }_{\text{h}}=1634 \text{Nm}/\text{rad}\); and case II: \({A}_{\text{acc}}=1035.3 \text{rad}/{\text{s}}^{2}\), \({t}_{\text{d}}=22.5 \text{ms}\), \({\kappa }_{\text{h}}=4377 \text{Nm}/\text{rad}\) in the gray/dark and bright regions, respectively. For these cases we plot the angular velocity of the CC relative to the skull, i.e., \({\dot{\theta }}_{\text{CC}}+{\dot{\theta }}_{\text{s}}\) (note that the “plus” sign is due to the choice of the references for \(\theta\)’s), for 30 ms and examine its instantaneous frequency content.

Optimal head–helmet coupling, \({\kappa }_{\text{h}}\), minimizing the maximum strain of (a) the CC (\({\kappa }_{\text{h}}^{\text{CC}}\)), and (b) the head (\({\kappa }_{\text{h}}^{\text{h}}\)), (c) the brain (\({\kappa }_{\text{h}}^{\text{b}}\)), and (d) the ratio between the contour of (c) and (a), over a range of rotational acceleration amplitudes and durations.
Comparison between the magnitudes of the wavelet spectra41 of the relative angular velocity of the CC in cases I and II during helmeted impacts shows major differences (Fig. 5). In Case I, which is the linear case, the optimal helmet stiffness for minimizing CC relative motion is very similar to that for minimizing head motion (\({\kappa }_{\text{h}}^{\text{b}}/{\kappa }_{\text{h}}^{\text{CC}}=1.002\)), as demonstrated by the rather mono-harmonic response of the CC apart from the frequency burst in the initial region due to the impulse. The need for a softer helmet in Case II (\({\kappa }_{\text{h}}^{\text{b}}/{\kappa }_{\text{h}}^{\text{CC}}=2.287\)), is evident in Fig. 5c. The softer helmet dampens the higher frequency harmonic in the CC response, resulting in a damped-frequency transition for the higher harmonic (~ 30 Hz) that converges to the main harmonic response. One can also notice that the overall amplitude (values of the peaks and valleys) of the relative angular velocity of the CC increases in the beginning and then decays. This, along with the fact that the frequency content of the motion of the CC has a time varying mode (that is, the gray region that begins at ~ 30 Hz), indicates the nonlinear dynamical nature of the motion of the CC, which can lead to motion (or energy) localization in the CC.1,53

Plots (a) and (b) show the relative angular velocity of the CC and the magnitude of its wavelet transform for cases I and II, respectively, from the computational model (1). For case I: \({A}_{\text{acc}}=365.2 \text{rad}/{\text{s}}^{2}\), \({t}_{\text{d}}=16.5 \text{ms}\), \({\kappa }_{\text{h}}=1634 \text{Nm}/\text{rad}\). Plots (c) and (d) show the relative angular velocity of the CC and the magnitude of its wavelet transform, respectively, for case II: \({A}_{\text{acc}}=1035.3 \text{rad}/{\text{s}}^{2}\), \({t}_{\text{d}}=22.5 \text{ms}\), \({\kappa }_{\text{h}}=4377 \text{Nm}/\text{rad}\).
Discussion
Regardless of the types of materials used for helmet padding, their properties are selected to affect the head kinematics in order to minimize one or more head kinematics-based injury criteria. Helmets are often tested through various methods such as drop test,9,13 impact pendulum,47 linear impactor,3 as well as reconstruction of head impacts from recorded videos by launching helmeted crash test dummies.18 The dummy head’s motions from these experiments are then recorded and various kinematic-based head injury metrics such as peak translational (or rotational) acceleration magnitude,28,38,42 head injury criterion (HIC),16 rotational injury criterion (RIC),12,30 severity index (SI),6,7,20 peak change in rotational angular velocity,38,43,46 brain injury criterion (BrIC),49 summation of tests for the analysis of risk (STAR),9 etc. are then calculated. All of the mentioned criteria have one feature in common; that is, they only consider the kinematics of the head. This means that the kinematics and dynamics of the brain and its substructures are neglected, which is a deficiency of the current helmet design criteria. This methodology neglects the importance of FE-based head injury metrics such as peak principal strain in the CC,14,32 peak principal strain in the brain,14,32 Cumulative Strain Damage Measure (CSDM),49 and others26,48,54 have often been shown to be more predictive of mTBI.26 To address this, some recent studies have analyzed the effect of helmets on the deformation of the brain tissue.3,13 Diffuse axonal multi-axis general evaluation (DAMAGE) which predicts the brain strain from rotational head acceleration is a recently proposed injury metric which was recently used to analyze the performance of football helmets.3 In another study, equestrian helmets were tested using two different testing standards, and maximum principal strain, \({\text{CSDM}}_{10}\), and von Mises stress of the brain as a result of these impacts were measured.13. However, the effect of different helmet properties on the response of the brain tissue has not been yet analyzed.
The extended head–brain–helmet ROM presented in this work addresses this issue and enables us to study the effects of the helmet-head coupling on the head and brain substructures. This is important because it allows us to design new helmets utilizing FE-based injury criteria, even though the model only considers motion of the brain substructure(s) in the coronal plane (In order to extend the model further and more complicated models are required. This is one of our future works in this area). Among the various kinematic and FE-based injury metrics, peak principal strain in the CC was found to be the strongest predictor of mTBI.26 Various studies have also implicated deep white matter regions of the brain and especially the CC in mTBI pathology.1,29,34,35 Diffusion tensor imaging (DTI) of TBI patients showed that the white matter tracts such as CC, fornix, thalamus, cerebral peduncles, and hippocampus are among the most common brain regions with abnormal fractional-anisotropy in patients who suffered from TBI.29 Development and design of new helmets based on the deformation of these critical substructures acquired from FE simulations, however, would be computationally demanding and parameter studies even more so. Therefore, by using the newly-developed ROM, determination of helmet design parameters that minimize the substructure deformation (the CC in this work) becomes tractable.
Comparison between the optimized head–helmet coupling \({\kappa }_{\text{h}}\) that minimizes the strain of the head, brain, and CC, revealed substantially different patterns of helmet-head coupling stiffness values for these cases. Our simulations showed that to mitigate the motion of the head, a softer padding (lower \({\kappa }_{\text{h}}\)) is suitable at higher impact durations (Fig. 4b). However, they also showed that there is no correlation between impact amplitude and \({\kappa }_{\text{h}}\). On the other hand, as depicted in Figs. 4a and 4c, \({\kappa }_{\text{h}}\) suitable for minimizing the CC and the brain strains has nontrivial \({A}_{\text{acc}}\)–\({t}_{\text{d}}\) relations. To gain more insight into the likely inadequacies of current helmet design approaches, we superimposed the amplitude-duration characteristics of the helmeted impact tests on the acquired optimal \({\kappa }_{\text{h}}\) values (Figs. 4a–4c and 6). By comparing the contour of Fig. 4b and the experimental data points, we observe that the experimental data points for all the helmets (except the football helmets to some extent) approximately line up vertically, similar to the topology of the optimal \({\kappa }_{\text{h}}\) minimizing the maximum strain of the head (Figs. 4b and 6). This further supports the fact that the current helmet design criteria and approaches are based on the kinematics of the head rather than the brain and its substructures. In contrast, the experimental data points did not follow the contour patterns of the optimal \({\kappa }_{\text{h}}\) minimizing the maximum strain of either the CC or the brain. For further comparison, we superimposed on the contours of Fig.s 4 and 6 the iso-strain curves determined by Ref. 38 for 5, 10, and 15% strain levels in the brain. Comparing the contours in Fig. 4 with these iso-strain curves confirms our previous observation on the topological difference of \({\kappa }_{\text{h}}\) variation with respect to \(A\) and \({t}_{\text{d}}\) in Fig. 4b compared to those depicted in Figs. 4a and 4c. The iso-strain curves show that they are approximately aligned with contour lines of Figs. 4a and, especially, 4c. This is expected behavior, since \({\kappa }_{\text{h}}\) in these cases is optimized to protect the brain and the CC from large strains. However, in Fig. 4b we observe that the optimized \({\kappa }_{\text{h}}\) behavior is not relevant to the iso-strain curve. This infers that a helmet designed based on minimizing head motion only cannot protect the brain and its substructures against large impacts. Next, Fig. 4d depicts the difference between Figs. 4c and 4a by plotting the ratio of the optimal \({\kappa }_{h}\) that minimizes the strain in the brain to that of the CC. The contour (except for the extremely dark region) possesses values that are greater than unity. This implies that, despite the similarity between the topologies of Figs. 4a and 4c, the \({\kappa }_{\text{h}}\) needed to minimize the brain strain is usually stiffer than the \({\kappa }_{\text{h}}\) that minimizes the CC strain. This by itself implies that the CC is more susceptible to damage than the brain hemispheres under similar impact scenarios, leading to the observation that softer helmet-head coupling stiffness results in less transfer of impact energy to the brain and consequently the CC, which in turn decreases the strain in the CC. In practice, softening the helmet-head coupling stiffness comes at a price. More specifically, as \({\kappa }_{\text{h}}\) decreases, it becomes more possible for the relative motion of the helmet and the head to increase. As a result, a balance between the value of \({\kappa }_{\text{h}}\) and the maximum relative motion between the helmet and the heard must be considered in the design process. Another approach to address this potential problem is to utilize helmet paddings that possess elements that can buckle upon impact.22
As noted earlier, the contour of Fig. 4b shows that \({\kappa }_{\text{h}}\) varies only with the duration of excitation in the case of head strain minimization, because the dynamics of the head is dominated by linear effects—cf. Eq, (S1) in the Supplemental Material. However, examining Figs. 4a and 4c, we observe that the optimal \({\kappa }_{\text{h}}\) (which minimizes the maximum strain of the CC and the brain, respectively) is affected by both the amplitude and the duration of the excitation, because the motion of the CC and brain possess nonlinear dynamics. The nonlinear behavior of the CC has been previously verified in several works.1,35,41 In this specific scenario, we show and compare the angular velocity of the CC for two excitation cases: case I: \({A}_{\text{acc}}=365.2 \text{rad}/{\text{s}}^{2}\), \({t}_{\text{d}}=16.5 \text{ms}\), \({\kappa }_{\text{h}}=1634 \text{Nm}/\text{rad}\); and case II: \({A}_{\text{acc}}=1035.3 \text{rad}/{\text{s}}^{2}\), \({t}_{\text{d}}=22.5 \text{ms}\), \({\kappa }_{\text{h}}=4377 \text{Nm}/\text{rad}\).
The nonlinearity of Eq. (1) and the wavelet transforms shown in Fig. 5 lead to the conclusion that the CC behaves nonlinearly. In mechanical systems, a nonlinear attachment with small mass (such as the CC in this case) can absorb and store (localize) a significant portion of the energy of the system, which can result in large values of strain and strain rate. Based on this observation, we hypothesize that because of this behavior, the CC can experience unexpectedly large strains (and strain rates) not at the moment of impact, but at later times as a result of absorbing energy from different parts of the brain structure. This nonlinear response, in turn, results in changes to the optimal helmet properties minimizing CC response (Fig. 5c).
In this work, we attempted to extend the present criteria for protective helmet design by augmenting the previously developed reduced-order model of the human brain with a model of the skull and helmet, where the coupling between the head and helmet was derived through linear elasticity theory. For this study, we considered the maximum strain of the CC in scenarios where the head is excited by a non-ideal impact force of amplitude \(A\) and duration \({t}_{\text{d}}\). Next, we considered the variation of the optimal head–helmet coupling stiffness which minimized the maximum motion of the CC and the head. The comparison between the topology of the contour of the CC and brain deformation-based optimal stiffness with that of the head motion-based optimal stiffness revealed a completely different pattern for CC and brain motion-based optimal head–helmet coupling stiffness. We identified the source of this difference to be the linear vs. nonlinear nature of the dynamics of the head and the CC (and brain). This finding was further validated by performing impact tests on seven different helmets for five different sports. Here, we showed that the characteristics of the impacts, i.e., acceleration amplitudes and durations, felt by the dummy head protected by the helmets, aligned with the contour topology of the head motion-based optimal head–helmet coupling stiffness identified by our ROM. This verified that most current helmet design criteria are based on head kinematics, while our study showed that when the nonlinear kinematics of the CC is considered in head–helmet coupling design, completely different coupling stiffness values are found to minimize the motion of the CC. This work suggests that designing helmets based on more sophisticated criteria to protect certain substructures of the brain, rather than considering only the kinematics of the head, may be advantageous. The importance of this work is that not only does it reveal the nonlinearity of the dynamics of the CC, but also it demonstrates how head–helmet coupling is affected by the dynamics of the CC over a range of impact forces. This is in contrast with the apparent insensitivity of the head–helmet coupling stiffness to excitation characteristics when only the kinematics of the head is considered.
References
Abderezaei, J., W. Zhao, C. L. Grijalva, et al. Nonlinear dynamical behavior of the deep white matter during head impact. Phys. Rev. Appl. 12:014058, 2019.
Andena, L., F. Caimmi, L. Leonardi, et al. Towards safer helmets: characterisation, modelling and monitoring. Procedia Eng. 147:478–483, 2016.
Bailey, A. M., E. J. Sanchez, G. Park, et al. Development and evaluation of a test method for assessing the performance of American football helmets. Ann. Biomed. Eng. 48:2566–2579, 2020.
Bailly, N., Y. Petit, J.-M. Desrosier, et al. Strain rate dependent behavior of vinyl nitrile helmet foam in compression and combined compression and shear. Appl. Sci. 10:8286, 2020.
Bazarian, J. J., T. Zhu, J. Zhong, et al. Persistent, long-term cerebral white matter changes after sports-related repetitive head impacts. PLoS ONE. 9:e94734, 2014.
Beckwith, J. G., J. J. Chu, and R. M. Greenwald. Validation of a noninvasive system for measuring head acceleration for use during boxing competition. J. Appl. Biomech. 23:238, 2007.
Beckwith, J. G., R. M. Greenwald, and J. J. Chu. Measuring head kinematics in football: correlation between the head impact telemetry system and Hybrid III headform. Ann. Biomed. Eng. 40:237–248, 2012.
Bland, M. L., C. McNally, and S. Rowson. Differences in impact performance of bicycle helmets during oblique impacts. J Biomech Eng. 2018. https://doi.org/10.1115/1.4040019.
Bland, M. L., C. McNally, D. S. Zuby, et al. Development of the STAR evaluation system for assessing bicycle helmet protective performance. Ann. Biomed. Eng. 48:47–57, 2020.
Bliven, E., A. Rouhier, S. Tsai, et al. Evaluation of a novel bicycle helmet concept in oblique impact testing. Accid. Anal. Prev. 124:58–65, 2019.
Buck, P. W. Mild traumatic brain injury: a silent epidemic in our practices. Health Soc. Work. 36:299–302, 2011.
Caccese, V., J. Ferguson, J. Lloyd, et al. Response of an impact test apparatus for fall protective headgear testing using a Hybrid-III head/neck assembly. Exp. Techn. 40:413–427, 2016.
Clark, J. M., T. B. Hoshizaki, A. N. Annaidh, et al. Equestrian helmet standards: do they represent real-world accident conditions? Ann. Biomed. Eng. 2020. https://doi.org/10.1007/s10439-020-02531-y.
Coats, B., S. A. Eucker, S. Sullivan, et al. Finite element model predictions of intracranial hemorrhage from non-impact, rapid head rotations in the piglet. Int. J. Dev. Neurosci. 30:191–200, 2012.
Cobb, B. R., A. M. Zadnik, and S. Rowson. Comparative analysis of helmeted impact response of Hybrid III and National Operating Committee on Standards for Athletic Equipment headforms. Proc. Inst. Mech. Eng. Part P J. Sports Eng. Technol. 230:50–60, 2016.
Eppinger, R., M. Kleinberger, and S. Kuppa et al: Development of improved injury criteria for the assessment of advanced automotive restraint systems, 1998.
Fernandes, F. A., R. J. Alves de Sousa, M. Ptak, et al. Helmet design based on the optimization of biocomposite energy-absorbing liners under multi-impact loading. Appl. Sci. 9:735, 2019.
Funk, J. R., R. Jadischke, A. Bailey, et al. Laboratory reconstructions of concussive helmet-to-helmet impacts in the national football league. Ann. Biomed. Eng. 48:2652–2666, 2020.
Gabler, L. F., J. R. Crandall, and M. B. Panzer. Development of a second-order system for rapid estimation of maximum brain strain. Ann. Biomed. Eng. 47:1971–1981, 2019.
Gadd, C. W. Use of a weighted-impulse criterion for estimating injury hazard. In: Vol SAE Technical Paper, 1966.
Ghazi, K., S. Wu, W. Zhao, et al. Instantaneous whole-brain strain estimation in dynamic head impact. J. Neurotrauma. 38:1023–1035, 2021.
Giudice, J. S., A. Caudillo, S. Mukherjee, et al. Finite element model of a deformable American football helmet under impact. Ann. Biomed. Eng. 48:1524–1539, 2020.
Gurdjian, E. S., V. R. Hodgson, L. M. Thomas, et al. Significance of relative movements of scalp, skull, and intracranial contents during impact injury of the head. J. Neurosurg. 29:70, 1968.
Hansen, K., N. Dau, F. Feist, et al. Angular Impact Mitigation system for bicycle helmets to reduce head acceleration and risk of traumatic brain injury. Accid. Anal. Prev. 59:109–117, 2013.
Harmon, K. G., J. Drezner, M. Gammons, et al. American Medical Society for Sports Medicine position statement: concussion in sport. Clin. J. Sport Med. 23:1–18, 2013.
Hernandez, F., L. C. Wu, M. C. Yip, et al. Six degree-of-freedom measurements of human mild traumatic brain injury. Ann. Biomed. Eng. 43:1918–1934, 2015.
Hinton-Bayre, A. D., G. Geffen, and P. Friis. Presentation and mechanisms of concussion in professional Rugby League football. J. Sci. Med. Sport. 7:400–404, 2004.
Holbourn, A. H. S. Mechanics of head injuries. Lancet. 242:438–441, 1943.
Hulkower, M. B., D. B. Poliak, S. B. Rosenbaum, et al. A decade of DTI in traumatic brain injury: 10 years and 100 articles later. Am. J. Neuroradiol. 34:2064–2074, 2013.
Kimpara, H., and M. Iwamoto. Mild traumatic brain injury predictors based on angular accelerations during impacts. Ann. Biomed. Eng. 40:114–126, 2012.
Kleiven, S. Evaluation of head injury criteria using a finite element model validated against experiments on localized brain motion, intracerebral acceleration, and intracranial pressure. Int. J. Crashworthiness. 11:65–79, 2006.
Kleiven, S. Predictors for traumatic brain injuries evaluated through accident reconstructions. The Stapp Association, 2007.
KrzeminskI, D. E., J. T. Goetz, A. P. Janisse, et al. Investigation of linear impact energy management and product claims of a novel American football helmet liner component. Sports Technol. 4:65–76, 2011.
Kumar, R., R. K. Gupta, M. Husain, et al. Comparative evaluation of corpus callosum DTI metrics in acute mild and moderate traumatic brain injury: its correlation with neuropsychometric tests. Brain Injury. 23:675–685, 2009.
Laksari, K., M. Kurt, H. Babaee, et al. Mechanistic insights into human brain impact dynamics through modal analysis. Phys. Rev. Lett. 120:138101, 2018.
Laksari, K., L. C. Wu, M. Kurt, et al. Resonance of human brain under head acceleration. J. R. Soc. Interface. 12:20150331, 2015.
Langlois, J. A., W. Rutland-Brown, and M. M. Wald. The epidemiology and impact of traumatic brain injury: a brief overview. J. Head Trauma Rehabil. 21:375–378, 2006.
Margulies, S. S., and L. E. Thibault. A proposed tolerance criterion for diffuse axonal injury in man. J. Biomech. 25:917–923, 1992.
McAllister, T. W., J. C. Ford, S. Ji, et al. Maximum principal strain and strain rate associated with concussion diagnosis correlates with changes in corpus callosum white matter indices. Ann. Biomed. Eng. 40:127–140, 2012.
McIntosh, A. S., K. Curtis, T. Rankin, et al. Associations between helmet use and brain injuries amongst injured pedal-and motor-cyclists: a case series analysis of trauma centre presentations. J. Austral. Coll. Road Saf. 24:11, 2013.
Mojahed, A., J. Abderezaei, M. Kurt, et al. A nonlinear reduced-order model of the corpus callosum under planar coronal excitation. J. Biomech Eng. 2020. https://doi.org/10.1115/1.4046503.
Ommaya, A. K., F. Faas, and P. Yarnell. Whiplash injury and brain damage: an experimental study. JAMA. 204:285–289, 1968.
Ommaya, A. K., and A. E. Hirsch. Tolerances for cerebral concussion from head impact and whiplash in primates. J. Biomech. 4:13–21, 1971.
Ouckama, R. and D. Pearsall. Projectile impact testing of ice hockey helmets: headform kinematics and dynamic measurement of localized pressure distribution. Proceedings, IRCOBI conference, 2014
Ramirez, B. J., and V. Gupta. Evaluation of novel temperature-stable viscoelastic polyurea foams as helmet liner materials. Mater. Des. 137:298–304, 2018.
Rowson, S., S. M. Duma, J. G. Beckwith, et al. Rotational head kinematics in football impacts: an injury risk function for concussion. Ann. Biomed. Eng. 40:1–13, 2012.
Rowson, B., S. Rowson, and S. M. Duma. Hockey STAR: a methodology for assessing the biomechanical performance of hockey helmets. Ann. Biomed. Eng. 43:2429–2443, 2015.
Shafiee, A., M. T. Ahmadian, H. Hoursan, et al. Effect of linear and rotational acceleration on human brain. Modares Mech. Eng. 15:248–260, 2015.
Smith, D. H., M. Nonaka, R. Miller, et al. Immediate coma following inertial brain injury dependent on axonal damage in the brainstem. J. Neurosurg. 93:315, 2000.
Sproule, D. W., E. T. Campolettano, and S. Rowson. Football helmet impact standards in relation to on-field impacts. Proc. Inst. Mech. Eng. Part P J. Sports Eng. Technol. 231:317–323, 2017.
Sullivan, S., S. A. Eucker, D. Gabrieli, et al. White matter tract-oriented deformation predicts traumatic axonal brain injury and reveals rotational direction-specific vulnerabilities. Biomech. Model. Mechanobiol. 14:877–896, 2015.
Tt, M., A. Ne, L. Be, et al. Functionally-detected cognitive impairment in high school football players without clinically-diagnosed concussion. J. Neurotrauma. 31:327–338, 2014.
Vakakis, A. F., O. V. Gendelman, L. A. Bergman, et al. Nonlinear Targeted Energy Transfer in Mechanical and Structural Systems. Dordrecht: Springer, 2008.
Ward, C., M. Chan, and A. Nahum. Intracranial pressure—a brain injury criterion. SAE Trans. 89:3867–3880, 1980.
Wu, T., A. Alshareef, J. S. Giudice, et al. Explicit modeling of white matter axonal fiber tracts in a finite element brain model. Ann. Biomed. Eng. 47:1908–1922, 2019.
Wu, S., W. Zhao, K. Ghazi, et al. Convolutional neural network for efficient estimation of regional brain strains. Sci. Rep. 9:17326, 2019.
Zhang, K., B. Johnson, D. Pennell, et al. Are functional deficits in concussed individuals consistent with white matter structural alterations: combined FMRI & DTI study. Exp. Brain Res. 204:57–70, 2010.
Acknowledgments
This work was supported in part by National Science Foundation Grant No. CMMI-17-1727761 and CMMI-17-1728186. Any opinions, findings, and conclusions or recommendations expressed in this work are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Author information
Authors and Affiliations
Corresponding author
Additional information
Associate Editor Stefan M. Duma oversaw the review of this article.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Appendix
Appendix
Experimental Impact amplitude–Duration Relation for Various Helmets
In Fig. 4, we showed the variation of the optimal helmet-head coupling stiffness (based on minimization of either head, brain or the CC strain) as a function of duration and amplitude of the impact applied to the head. Moreover, for the sake of brevity, we superimposed the experimental impact amplitude-relation resulted from several impact tests done only on a football and a cycling helmet. Here, in Fig. 6, we depict Fig. 4, but with all tested helmets superimposed on the optimal \({\kappa }_{\text{h}}\) contours.

Optimal head–helmet coupling, \({\kappa }_{\text{h}}\), minimizing the maximum strain of (a) the CC (\({\kappa }_{\text{h}}^{\text{CC}}\)), and (b) the head (\({\kappa }_{\text{h}}^{\text{h}}\)), (c) the brain (\({\kappa }_{\text{h}}^{\text{b}}\)), and (d) the ratio between the contour of (c) and (a), over a range of rotational acceleration amplitudes and durations.
When comparing (a) and (c) with (b), we observed that while the optimal \({\kappa }_{h}\) based on the brain, \({\kappa }_{\text{h}}^{\text{b}}\), and the CC strain, \({\kappa }_{\text{h}}^{\text{CC}}\), are dependent on both the excitation amplitude and duration, the optimal \({\kappa }_{\text{h}}\) based on the head motion, \({\kappa }_{\text{h}}^{\text{h}}\), is only sensitive to the impact duration and not the amplitude. Interestingly, our measured optimal \({\kappa }_{\text{h}}\) for these brain regions observed in (a) and (c), topologically align with the iso-strain curves computed by Ref. 38, hinting at a physical correspondence between the change of the optimal helmet-head coupling stiffness value as the brain strain level changes. Comparison of the helmet experiments in (a) and (c) with (b) also shows that the current helmet designs, with kinematics aligned nearly vertically for different impact energies, are either based on linear dynamics assumptions or merely the head motion. (The hatched regions in (a), (c) and (d) correspond to scenarios where nontrivial optimal \({\kappa }_{\text{h}}\) was not found and the algorithm converged to the trivial minimum, which is extremely soft helmet-head coupling to avoid transferring energy from helmet to brain). Figure 6 better illustrates that the impact amplitude–duration relation for all the helmets except football align vertically, which correlates with the contour A1b. This further confirms that most of helmets are designed to minimize the strain of the head rather than the brain or any of its substructures.
Rights and permissions
About this article

Cite this article
Mojahed, A., Abderezaei, J., Ozkaya, E. et al. Predictive Helmet Optimization Framework Based on Reduced-Order Modeling of the Brain Dynamics. Ann Biomed Eng 50, 1661–1673 (2022). https://doi.org/10.1007/s10439-022-02908-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10439-022-02908-1