
Abstract
Optical-induced dielectrophoresis (ODEP) is a novel technology used in the field of micro-/nanoparticles manipulation. The finite element method was applied for ODEP to research the particles motion in this paper. The potential distribution in the optoelectronic chip, which was induced by the incident light spot, was attained through electric current module in the COMSOL 4.3a. The particles motion was studied by coupling the module of electric current and particle tracing for fluid flow. Compared with molecular dynamics, the method proposed in the paper could effectively simplify the tedious programming. The polystyrene sphere (PS) particles with the radius of 2, 5, 10, and 15 μm were, respectively, used as the objects. The kinetic energy of the PS created by the dielectrophoresis (DEP) forces, the Stokes drag forces, the gravity forces, and the Brownian motion forces was calculated during the whole manipulation process. The simulation results indicated that with the decreasing in the particle size, the time on enrichment of the smaller PS would become longer. It was because that for the smaller PS, the effect of DEP forces would play less important role in the system. The conclusions in this paper could be used as a theoretical guidance in the further research.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The technology of dielectrophoresis (DEP) has been used as a tool to manipulate nanoparticles, such as carbon nanotubes or wires. And most effects of DEP are now being directed toward biomedical application, for example the spatial manipulation and selective separation/enrichment of target cells, bacteria, biosensors, immunoassay, and high-throughput molecular screening (Pethig 2010).
For applied experiment, Chiou et al. (2005) firstly proposed and developed the optical-induced dielectrophoresis (ODEP) technology in 2005. Due to the characteristics of the light-sensitive materials used in the optoelectronic chip, optical virtual electrodes would be generated by the projected light spot, resulting in a non-uniform electric field within the optoelectronic chip. That is to say, ODEP forces would be created, which could be used to manipulate cells or particles. Contrasted with traditional metallic microelectrodes DEP, in this technology, the projected light pattern was conveniently to program. After that, many researchers have paid much attention to use this technology. For example, Ohta et al. (2007) and Hwang et al. (2008), respectively, used He–Ne laser and LCD as light source to research the control of bio-particles. Hwang (Hwang and Park 2008) demonstrated rapid manipulation and selective concentration of microparticles using DEP based on optoelectrofluidic platform in 2008. Lin et al. (2010) presented new methods to accurately separate microparticles with different sizes using ODEP forces. In addition, Lee et al. (2010) could real-time manipulate patterning of carbon nanotubes by using programmed light as virtual electrodes.
Correspondingly, there was less study on the fundamental research of theory. Jones (2003) reported the DEP theory and presented a relational expression of DEP forces and torques when the cellars or particles were suspended in a non-uniform electric field in 1997. The method of molecular dynamics was used by Salonen et al. (2005) to study trajectory of the colloid in 2005. Lin and Aldaeus (2006) combined finite element method (FEM) and molecular dynamics to simulate the motion of the particles. Besides DEP forces, the forces used in the dynamics model also included the particle–particle electrostatic forces, particle–particle interfacial repulsive forces, particle–wall repulsive forces, and the hydrodynamic forces in Stokes flow. Then, Ni’s research group (Ni et al. 2009; Zhu et al. 2012) as well employed molecular dynamics method to research kinds of impact factors involving the particles behavior. The group had begun to make use of non-equilibrium molecular dynamics to analyze the velocity of particles that experienced DEP forces. In 2012, based on FEM and molecular dynamics method, Ni’s group also established a 3D optoelectronic tweezers (OET) model, in which the velocity Verlet algorithm was applied to research the optical ring thickness influences on the effect of positioning and assembling for 5- or 2-μm radius particles.
In all, it was meaningful to research the behavior of particles in ODEP system. Only a few studies of ODEP, however, referred to the trajectory simulation of particles. In this paper, simulations via COMSOL Multiphysics 4.3a software were implemented to study the motion of microparticles on lab-on-a-chip platform. The geometry parameters of the lab-on-a-chip were designed, which could be used to calculate the particle routes with the models of electric current and particle tracing for fluid (FPT). The results indicated that with the proposed method, some tedious and error-prone programming could be avoided. The FPT equations included most of the significant forces, i.e., the DEP forces, the Stokes drag forces, the gravity forces, and the Brownian motion forces. The particles used in the simulations were common polystyrene sphere (PS) beads, whose radii were, respectively, 2, 5, 10, and 15 μm. The results in this paper were helpful to the follow-up experimental studies of PS trapping. What is more, it could be used as a theoretical basis for developing ODEP device.
2 Optoelectronic tweezers structure and micromechanics principles
2.1 Structure of OET
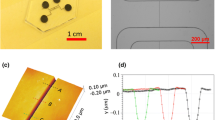
The ODEP technology was used by OET to achieve particles or cells manipulation. OET was invented by Chiou team in 2005 and first to operate the individual particle. Furthermore, the typical structure of an OET was fabricated by plasma-enhanced chemical vapor deposition (PECVD), the working principles of OET as shown in Fig. 1a. It should be pointed out that the size of optical ring in Fig. 1 was with outer radius of 50 μm and width of 10 μm. The ODEP chip size could define separately with height of 100 μm and width of 200 μm. The upper and the lower ends of OET were a transparent indium tin oxide (ITO) electrode (as seen in Fig. 1b). When without the projected light, there was uniform electric field like parallel-plate capacitor. But the spot projected on the photoconductive layer in the OET device was similar to the metal electrode that resulted in distortion electric field lines and formed non-uniform electric field.

Schematic illustration of the operating principle of the ODEP chip: a the structure of OET. b Cross-section view of the OET device and structure of photoconductive layer
The conductivity of photoconductive layer was more sensitive to the light and changed sharply under illumination or dark circumstances. In this condition, the particles within OET domain would be polarized and appeared movements. The material of photoconductivity was composed of three layers, which was separately a 20-nm silicon carbide (SiCx) passivation layer, a 2-μm intrinsic a-Si:H photoconductive layer, and a 50-nm n+ hydrogenated amorphous silicon (n+ a-Si:H) layer from top to bottom, as shown in Fig. 1b. Therefore, the projected spot which can be produced by the digital mirror device (DMD) was substituted for metal electrodes in the DEP application. It was obvious that the ODEP technology may increase flexibility and reduce cost.
2.2 Model for micromechanics principles in OET device
The particles experienced the kinds of forces inside OET device. It was required to think about some of the important forces in system before simulation. In this paper, for the relative research based on the single particle, therefore, the simulation had neglected the effect of particle–particle interaction forces. Thus, the model coupled the rest of the forces, i.e., the DEP forces, the Stokes drag forces, the gravity forces, and the Brownian motion forces. The DEP forces exerted on the polystyrene particles where the expression was as follows:
Here, R p is the radius of particles; ɛ m is the permittivity of solvent. The Re[K(ω)] stands for the real part of Clausius–Mossotti (CM) factor and K(ω) = (ɛ * p − ɛ * m )/(2ɛ * m + ɛ * p ), respectively, where ɛ * p and ɛ * m are the complex permittivity of particles and solution. ɛ * = ɛ − jσ/(2πf), where σ denotes separately the conductivity and f denotes the frequency of the alternating current (AC) signal. In addition, the characteristic parameters \(\vec{u}\) and \(\vec{v}\) are the velocity of PS particles and fluid among stokes drag forces such as Eq. (2), m p is the mass of particles. The parameter τ p is the particle velocity response time, which is τ p = 2ρ p R 2 p /9μ (the fluid viscosity μ is equal to 10−3 Pa s, the density of aqueous solution ρ m is 1,000 kg/m3).
When the particles are inside OET device, the gravity forces are expressed as:
The value of ρ m is the density of aqueous solution and g denotes gravitational constant in the Eq. (3) (ρ m is 1,000 kg/m3; in addition, ρ p is 1,050 kg/m3). The Brownian force is given by Eq. (4), respectively; k B and T are Boltzmann’s constant and absolute fluid temperature (Li and Ahmadi 1992). The interval time Δt is the time step in the solver and unite in \(\zeta\), which is a normally distributed random number with a mean of zero and unit standard variation.
In this case, F B affecting on the trapping of particle could be taken into account in OET device, assuming the temperature to be 300 K.
3 Simulations and analysis
In general, PS can be found in much of microparticles manipulation experiment. Since it was much difficult to store biologic cells, manipulate cells, such as erythrocyte, yeast, and leukocyte and so on (Pethig 2010; Hwang and Park 2008), the simulation of PS can also have a foundation of further study on the development of cells manipulation. The trajectory of the particles was solved by the dual different method for microfluid system. The first one was convection–diffusion–migration (CDM) equation, which described particles, energy, or other physical quantities were transferred inside a physical system due to convection, diffusion, or migration. The equation could be solved from the continuity equation, which stated that the rate of change for a scalar quantity in differential control volume was given by flow and diffusion into and out of the system, such as the literatures (Baylon-Cardiel et al. 2009; Ivory and Srivastava 2011). But CDM method was unable to give detailed research into motion of individual particles in a liquid. For the motion of particles in the solvent, the other way was used by MD method, which was a computer simulation of physical movements of atoms and molecules.
3.1 Simulation of electric field intensity distribution
The top and bottom glasses of OET chip were made of ITO material, which has transparent and conductive properties. While applied voltage V was linked to ITO glasses, the electric field distribution was described by the Laplace equation, which was expressed as Eq. (5) in the OET.
Moreover, the sectional view of correspondingly solving domain and boundary conditions was shown in Fig. 2. For ODEP bio-chip-like sandwiched structure, however, the 2-μm photoconductive film thickness could be modeled. The solution spacer size could define separately 100 μm heighten and 200 μm width. In this typical OET device, V 0 was an AC voltage signal of 10 Vpp at 1 MHz and the conductivity of photoconductive film (a-Si:H) layer was approximately 6.7 × 10−5 S/m in dark environment, but the conductivity of a-Si:H is estimated to increased to 0.2 S/m with strong projected a ring of white light, as shown in Fig. 2. The value V L was voltage drops across the liquid layer within light regions and vice versa; the parameter V D stood for voltage drops in dark regions. The ring-shaped optical pattern which was employed in research model was the most common. Optical virtual electrode with outer radius 50 μm and width 10 μm was designed. The de-ionized water where the relative permittivity and conductivity were, respectively, 80 and 10−3 S/m was used in this analytic sub-domain.

Schematic view of ODEP microfluidic device for two-dimensional computational domain considered for analysis
Consequently, the two-dimension model was adopted to analyze the movements of particles as the research object because two-dimensional simplified model of OET could reduce compute time and compare with later experimental results quickly. Simulations via COMSOL 4.3a Multiphysics software were implemented; meanwhile, free mesh was used to obtain an efficient FEM model, which was 13,416 triangular, 600 edge, and 18 vertex elements. When the microspot hits the photoconductivity layer, therefore, it was obvious to find the inhomogeneous electric filed, as shown in Fig. 3a, which was the results of postprocessing by solving. The voltage numeric value could be obtained from solvent and photoconductivity surface using FEM boundary integral method. Within this area, the maximum or minimum potential was, respectively, equal to 9.997 and 7.995 V in Fig. 3b.

Based on FEM solving electric field distribution: a distribution of the magnitude and direction of the electric field. The arrow represented the direction of intensify of the electric field. b The Gauss distribution potential between aqueous solvent and photoconductive layer
Beyond that, there were different distributions of the electric field for the particle trap along with ring center of vertical plane. As seen in Fig. 4, the center of optical ring existed in a lower electric field as well as potential energy trap. However, with the high increment, the electric field gradually decreased and became flat. According to the Eqs. (1) and (5), the magnitude of the DEP force was also acquired in different position; for instance, the horizontal DEP forces through solving partial derivative equation \((F_{{{\text{DEP}} - x}} = 4\pi R_{p}^{3} \varepsilon_{m} \text{Re} [K(\omega )]\left[ {\left( {\frac{\partial V}{\partial x} \cdot \frac{\partial }{\partial x}\left( {\frac{\partial V}{\partial x}} \right) + \frac{\partial V}{\partial y} \cdot \frac{\partial }{\partial x}\left( {\frac{\partial V}{\partial y}} \right)} \right)} \right]),\) as shown in Fig. 5, form photoconductive layer 5–25 μm in height. Evaluating the electric field distribution had already been achieved in ODEP system.

The electric field norm in the different height in OET device

The magnitude of DEP force in four different height variations: a F DEP-x horizontal forces and b F DEP-y vertical forces
3.2 Simulation of particle trajectory on different position
For the research of the particle trajectory, the knowledge of MD method can be applied. The MD theory was a computer simulation of physical movements of atoms and molecules, which relied on Newtonian mechanics to analyze for different states for different molecular system on microlevel. This Sect. 2.2 had mainly shown a few forces for the PS particle on aqueous solution. In the second step, FPT model which existed in COMSOL could be utilized to continue mechanical analysis inside ODEP system. The relative motion equation had the two ways, which was Massless or Newtonian formula. In fact, the condition of massless was applied to mathematic particles tracing module, not much physical meanings; for instance, light trails and geometric optics can be calculated and simulated. In this way, the model employed Newtonian equation, which was shown at Eq. (6) because the forces about F SD and F G must take into account m p instead of trying to ignore them.
In the Eq. (6), according to composite force F t , the particle’s motion state and position would be changed for some time. In the FPT model, the wall condition could be considered, which included “bounce”, “freeze”, “stick”,“disappear”, “diffuse scattering”, and “general reflection” equation provided by COMSOL. However, the disappearance condition of wall was unfit for this experiment. Lin (2006) and Zhu (2012) choose short-range force repelling the boundary by a particle in order to avoid them leave the bio-chip. Using “bounce”, “stick”, “diffuse scattering”, or “general reflection” condition for the particles behavior, the options were interest in the total particle conservation of momentum. In the paper, an amount of many simulative results had shown that the particles elastic collision with wall would result in a vast number of computations to be adopted the above wall condition. The simulation generally observed the trajectory of particle inside the solution, hence, so that the freeze condition will be used.
Incorporated with the EC results, the time-dependent solver could be used in which time step and range were set to 10−2 and 0–10 s. The simulation had two categories: the one was particle distribution without electric field, and the other contained electric field and light projecting pattern. The particle of bulk conductivity, K s the surface conductivity, and the relative permittivity were, respectively, 1 × 10−16 S/m, 2 × 10−9 S/m, and 2.53. In fact, dielectrophoretic forces provided by FPT model, the expression ignored the permittivity factor, but the FPT model can provide force equation being flexible programming in most cases. Therefore, the paper still kept DEP forces expression as Eq. (1) and the input AC signal frequency 1 MHz.
Solution containing PS beads was chosen 5 μm in this study. The real part of colloid’s CM factor was −0.4767 according to K(ω) = (ɛ * p − ɛ * m )/(2ɛ * m + ɛ * p ) equation, so the PS beads can be exerted by negative DEP forces and pushed to the weak electric filed area. In the end, there were to place randomly PS particles, which the total number of N was 12 in the 2D fluidic chamber as shown in Fig. 6a. It was intuitive to displace the trajectory of PS beads after simulation. Setting radius scale factor 3,000, although it disproportionate for the inherent size of LOC; however, it look clear. When there is no electric field, the particles will move slowly under the action of F SD , F G , and F B forces, and 10 s later all particles tend to accumulate at the bottom of the fluidic chamber. It should be noted that, the trajectory of particles was not a straight line because of that there exist a Brownian motion forces F B , which were caused by the randomly collision of atom (considering that the temperature T was 300 K). The particle can be pushed toward the lower electric field when DEP phenomenon occurred , but the particles outside the edge of optical ring would be pushed to the position that was 40 μm away from the center of the optical ring after DEP forces being applied. The maximum horizontal DEP forces which located at the boundary of the illumination and dark area could push the particles toward the center of optical ring or around, as illustrated in Fig. 6f. And the vertical FDEP-y can act on the particles so that they would be motion of acceleration toward subsidence because the particles do not completely precipitate during in 10 s without DEP forces in Fig. 6d. The results were roughly consistent with Zhu (2012) or Liang (2011) and provided a theoretical guidance for the further research.

The simulation of the particle motion with FPT: a the 2D view of the initial distribution of microparticles with 5 μm radius. b The schematic of mesh-based particle release. c Without the input of the AC signal and light spot, the motion trajectory of particles in 2.1 s. d Without the input of the AC signal and light spot, the motion trajectory of particles in 10 s. e With the input of the AC signal and light spot, the motion trajectory of particles in 2.1 s. f With the input of the AC signal and light spot, the motion trajectory of particles in 10 s
3.3 Simulation of particle motion with different sizes
In this section, for the different radius PS beads used in FPT model, it was useful to utilize DEP forces to do interesting and relevant work on the aggregation of the particles. The single particle had been placed at the left of light ring, which was (−40, 50 μm) the coordinate far away from photoconductivity layer 50 μm distance. In this research, for single PS beads with different radii, a single particle of simulation could effectively reduce the amount of calculation. The simulative enrichment phenomenon of single PS beads can be shown in Fig. 7 for different radii during 10 s. On the other hand, the much larger PS particle moved to the center of optic ring in the short time. To analyze the size effects on enrichment of time, the theoretical results were in agreement with the experimental ones as Salonen et al.’s (2005) or Ni et al.’s (2009) literature. The collection of smaller particles would be slow due to the weak DEP force and strong Brownian forces. Since the DEP force is related to the size of particles, the smaller the particles are, the weaker the DEP force is, and thus the longer the time will be taken for the particles moving to the optical ring under the action of DEP force.

The motion of different radius particle in the same position during 10 s
The particles with radius of 10 and 15 μm reached the center of light ring in 0.57 and 0.26 s. However, the much smaller the particle, the longer time it took to gather a large number of particles into ring area, namely DEP force was proportional to the cube of the radius of the particle in Eq. (1). Based on this conclusion, Ni (2009) proposed the solutions by increasing applied potential energy or shortening light spot in order to strengthen the electric field. Then, the kinetic energy of the particle, which is shown in Fig. 8, can be calculated. The larger the particle, the much greater the kinetic energy would be generated. Due to the freeze wall condition, the particle position no longer changed and the particle velocity kept the same value after contacted with the wall. If the R p was equal to 2 μm, the kinetic energy was shown in much greater fluctuation feature because of the higher probability for molecular collision.

The kinetic energy changed curve from 0 to 10 s: a R P = 2 μm; b R P = 5 μm; c R P = 10 μm; d R P = 15 μm
4 Conclusions
In this paper, the electric field distribution and the particles trajectory in OET device were simulated and analyzed via COMSOL 4.3a Multiphysics numerical software. First of all, the electric field intensity under the incident light spot was researched with the help of EC model. Then, incorporated with FPT model, the motion of particle due to the DEP forces was predicted. The proposed method could effectively simplify the tedious programming of MD method. In this simulation, the forces included DEP forces, Stokes drag forces, gravity forces, and Brownian forces, respectively, impacted on the PSs with different radii of 2, 5, 10, and 15 μm. The results indicated that it was difficult to gather the smaller PS beads because DEP force played less important role in the system, which was agreed with the experimental results in the literatures of Lin et al. (2010), Zhu et al. (2012), and Liang et al. (2011). To make the model as simple as possible, only the effect of a few main forces was considered. Other forces, like the particle–particle electrostatic forces, particle–particle interfacial repulsive forces, Joule heating, and electroosmosis, will be considered in the subsequent studies.
References
Baylon-Cardiel JL, Lapizco-Encinas BH, Reyes-Betanzo C, Chávez-Santoscoy AV, Martínez-Chapa SO (2009) Prediction of trapping zones in an insulator-based dielectrophoretic device. Lab Chip 9:2896–2901
Chiou PY, Ohta AT, Wu MC (2005) Massively parallel manipulation of single cells and microparticles using optical images. Nature 436:370–372
Hwang H, Park JK (2008) Rapid and selective concentration of microparticles in an optoelectrofluidic platform. Lab Chip 9:199–206
Hwang H, Choi YJ, Choi W, Kim SH, Jang J, Park JK (2008) Interactive manipulation of blood cells using a lens-integrated liquid crystal display based optoelectronic tweezers system. Electrophoresis 29:1203–1212
Ivory CF, Srivastava SK (2011) Direct current dielectrophoretic simulation of proteins using an array of circular insulating posts. Electrophoresis 32:2323–2330
Jones TB (2003) Basic theory of dielectrophoresis and electrorotation. Eng Med Biol Mag IEEE 22:33–42
Lee M-W, Lin Y-H, Lee G-B (2010) Manipulation and patterning of carbon nanotubes utilizing optically induced dielectrophoretic forces. Microfluid Nanofluid 8:609–617
Li A, Ahmadi G (1992) Dispersion and deposition of spherical particles from point sources in a turbulent channel flow. Aerosol Sci Technol 16:209–226
Liang WF, Wang SE, Qu YL, Dong ZL, Lee GB, Li WJ (2011) An equivalent electrical model for numerical analyses of ODEP manipulation. In: Proceedings of IEEE international conference on Nano/Micro Engineered and Molecular System (NEMS), pp 825–830
Lin Y, Aldaeus F, Amberg G, Roeraade J (2006) Simulation of dielectrophoretic motion of microparticles using a molecular dynamics approach. In: Proceedings of ICNMM 2006
Lin W-Y, Lin Y-H, Lee G-B (2010) Separation of micro-particles utilizing spatial difference of optically induced dielectrophoretic forces. Microfluid Nanofluid 8:217–229
Ni Z, Zhang X, Yi H (2009) Separation of nanocolloids driven by dielectrophoresis: a molecular dynamics simulation. Sci China Ser E: Technol Sci 52:1874–1881
Ohta AT, Chiou PY, Han TH, Liao JC, Bhardwaj U, McCabe ERB, Yu F, Sun R, Wu MC (2007) Dynamic cell and microparticle control via optoelectronic tweezers. Microelectromech Syst J 16:491–499
Pethig R (2010) Review article—Dielectrophoresis: status of the theory, technology, and applications. Biomicrofluidics 4:022811
Salonen E, Terama E, Vattulainen I, Karttunen M (2005) Dielectrophoresis of nanocolloids: a molecular dynamics study. Eur Phys J E: Soft Matter Biol Phys 18:133–142
Zhu X, Yin Z, Ni Z (2012) Dynamics simulation of positioning and assembling multi-microparticles utilizing optoelectronic tweezers. Microfluid Nanofluid 12:529–544
Acknowledgments
This work was supported in part by the National Natural Science Foundation of China under Grant No. 61203206 and 61273059, and the Fundamental Research Funds for the Central Universities under Grant No. 110204002, 110604009, and 110804003.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zhao, Y., Hu, S. & Wang, Q. Simulation and analysis of particle trajectory caused by the optical-induced dielectrophoresis force. Microfluid Nanofluid 16, 533–540 (2014). https://doi.org/10.1007/s10404-013-1246-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10404-013-1246-1