
Abstract
This study reports an optically driven platform upon which the manipulation and patterning of carbon nanotubes (CNTs) can be accomplished. A photoconductive layer made of amorphous silicon generates a nonuniform electric field within the developed platform at specific optically illuminated sites, which are usually referred to as “virtual electrodes,” that induces dielectrophoretic forces for manipulating the CNTs. The software-controlled light patterns enable a variety of flexible manipulation modes since it is now possible to dynamically reconfigure the optically projected electrode patterns. This approach allows for real-time manipulation and miscellaneous patterning of CNTs. The sorting and separation of bundled and dispersed CNTs is also demonstrated. This developed platform may be promising for rapid fabrication of CNT-based nanosensors together with nanoelectronics, purification as well as classification of synthesized CNTs and other applications requiring nanoscale manipulation.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The application of nanoscale materials in a variety of fields continues to steadily increase and has made substantial impact. Among them, carbon nanotubes (CNTs) have attracted considerable interest since their discovery in 1991 (Iijima 1991). There has been a tremendous progress in the synthesis of CNTs and other related nanomaterials in the past decade (Pauzauskie and Yang 2006; Xia et al. 2003). CNTs possess unique electrical properties, excellent thermal conductance, and high mechanical strength due to their distinctive quasi-one-dimensional structure made from graphene sheets (Tasis et al. 2006; Jorio et al. 2008). Applications of CNTs in nanoelectronics (Nagahara et al. 2002; Roschier et al. 2002), energy as well as hydrogen storage (Chen et al. 2001; Dillon and Heben 2001), nanosensors (Trojanowicz 2006), field emission devices (Choi et al. 2001), lighting devices, and reinforced materials (Baughman et al. 2002; Jorio et al. 2008) have been extensively investigated recently. To apply CNTs to many practical applications, it is essential to manipulate CNTs efficiently by arranging them at desired sites with a proper density. For instance, in constructing gas sensors, CNTs have to be precisely trapped and patterned across prefabricated electrode arrays to yield reproducible sensing characteristics (Trojanowicz 2006; Suehiro et al. 2003). This function is performed by detecting changes in the electrical resistance of CNTs layer as a result of their interaction with different sorts of analytes, a mechanism which has been usually used for detection of hydrogen, ammonia, nitrogen dioxide, and inorganic vapor. In this case, a proper density of CNTs cannot be arranged at desired sites, thus hindering the sensing characteristics of the nanosensors. Moreover, despite recent advancements in CNT synthesis, existing methods may produce CNTs with impurities. Furthermore, CNTs may be aggregated with different chiralities and electronic properties (Arnold et al. 2006; O’Connell et al. 2005). Therefore, obtaining dispersed, high-purity CNTs requires a tedious purification process before they can be used for practical applications (Grobert 2007). Till now, this still remains a critical issue for purifying and separating synthesized CNTs efficiently.
Some chemical approach has been adopted for manipulation of CNTs. Although CNTs’ exterior walls are not quite chemically reactive, their fullerene-like tips are well known to be reactive so as to make possible terminal functionalization of CNTs. In addition, various methods for modifying CNTs’ surfaces may also lead to self-assembly of ordered structure of single-walled carbon nanotube (SWCNTs) on metal substrates (Liu et al. 2000). Alternatively, optical tweezers (OT) have been intensively studied as an optical-based technique for the manipulation of microscale objects and even CNTs (Grier 2003; Tan et al. 2004). Although OT can accurately manipulate objects with sizes ranging from tens of nanometers to tens of micrometers by using high-power laser beams to trap and move the objects, it also requires high-precision positioning stages for manipulation, thus hindering their practical applications. Furthermore, the experimental setup for an OT system is relatively bulky and costly. Alternatively, dielectrophoresis (DEP) was used to address this issue. By using DEP forces, controlled assembly of single-walled and multi-walled CNTs (SWCNTs and MWCNTs) has been successfully aligned between gold electrodes with ten gaps which were made by microlithography definition (Seo et al. 2005, 2006; Chan et al. 2004). However, this technique requires prefabricated, microscale structures to apply the DEP forces for manipulating CNTs. Besides, the alignment of CNTs achieved for nanosensing and nanocircuiting applications is not uniform and thus variation between sensors is an issue. The DEP force has also been used for purification of postsynthesis CNTs (Yamamoto et al. 1998). In this method, orientation and purification of CNTs was fulfilled in isopropyl alcohol. While CNTs moved toward the electrodes applied with an electric field with a driving frequency ranging from 10 Hz to 10 MHz, carbon particles acting as impurities became more difficult to move with increasing frequencies. Sorting utilizing DEP forces to obtain pure CNTs with a more uniform size distribution and electronic properties has been reported as well (Hersam 2008; Krupke et al. 2003). Recently, accurate and uniform positioning of single cells, microparticles, silver, and silicon nanowires (NWs) has been demonstrated by using optoelectronic tweezers (OET) (Chiou et al. 2005; Jamshidi et al. 2008). Moreover, manipulation of living cells such as blood cells has also been reported by adopting this OET technique (Hwang et al. 2008). In this approach, conventional DEP force was combined with optical operations so that the functions accomplished by the DEP force can be stepped further due to the versatility of optical operation. Based on DEP forces, OET serves as another powerful method for efficiently manipulating some microscale, or even nanoscale objects. Even though this method has been used for manipulation of nanoscale materials such as inorganic NWs, it has never been reported for manipulation or even patterning of CNTs.
Alternatively, another scheme was used to specifically pattern NWs using contact printing techniques (Yerushalmi et al. 2007; Fan et al. 2008a, b). Highly ordered assembly of various kinds of NWs such as Ge, Si, core/shell Ge/Si, and CdSe has been demonstrated by using the contact printing technique. In an attempt to achieve highly ordered, dense, well-aligned, and regular arrays of NWs, differential roll printing (DRP) has also been adopted to address this issue, in which NWs can be controllably transferred from a planar growth substrate to a target substrate (Si, glass, plastic, paper, etc.). This approach is based on the growth of NWs on a cylindrical roller using vapor–liquid–solid (VLS) process followed by the DRP technique which directionally and regularly transfers as-grown NWs from the roller to the target substrate. Based on this approach, the target substrate should be patterned in advance using a photolithography process to define the desired assembly areas, a procedure required as in those conventional manipulation approaches using DEP forces induced between the fabricated metal electrodes. Since photolithography is inevitable under such circumstances, it is impossible to change the configuration of desired patterns once they have been determined.
In this study, a new scheme to manipulate CNTs in various kinds of layouts such as collection, specific patterning, dynamic movement of developed patterns, and separation of aggregated and well-dispersed CNTs has been accomplished simply by programming the light patterns illuminated on this platform, which has never been reported before. These results should provide a new approach for fabrication of CNTs-based electronic circuits, postsynthesis processing of CNTs, and other applications requiring efficient manipulation of CNTs. This study not only verifies the feasibility of OET system for manipulating CNTs but also demonstrates how powerful this ODEP platform could be used to realize many practical applications, especially for CNTs. Notably, CNTs are more challenging in terms of sample preparation, which has an extremely high tendency to bundle or aggregate together instead of appearing in individual ones. Accordingly, it is quite difficult to obtain evenly dispersed specimen of CNTs in the medium prior to some sophisticated procedures, while it is not the case for inorganic NWs.
Furthermore, NWs and CNTs, both benefiting from their nearly one-dimensional structures, can be both applicable as building blocks for electronic circuitry and reinforced nanocomposites. However, owing to their hollow structures (namely, nanotubes rather than nanowires) and large amounts of π-stacking electrons, CNTs can be potentially integrated for energy and hydrogen storage devices as well as field emission and lighting devices. This is one of the reasons why our ODEP platform for manipulating CNTs can make significant contribution in this field.
In brief, this study enables efficient real-time manipulation and patterning of CNTs within virtual electrodes areas defined simply by software and light projecting system. Furthermore, this unprecedented versatile platform to manipulate CNTs is a promising tool to purify, sort, and to separate postsynthesis CNTs so that application of CNTs in various fields can be advanced.
2 Materials and methods
2.1 Working principle of ODEP platform
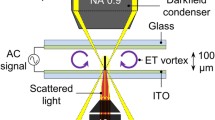
Figure 1a is an illustration showing the working principle behind this optically driven platform for manipulating CNTs. Dielectric materials including CNTs, to some degree, experience charge polarization which induces a dipole once an external electric field is applied. This causes the CNTs to arrange themselves along the direction of the external field. If the external field is not uniform, the CNTs will experience a net force, usually referred to as a DEP force. In this study, hydrogenated amorphous silicon (a-Si, 1 μm thick) is adopted as the photoconductive layer below which molybdenum (Mo, 10 nm thick) is used as a conductive and adhesive layer. CNTs are dispersed in a sodium dodecyl sulfate (SDS) medium and then sandwiched between two indium-tin-oxide (ITO) glass plates. An alternating current (AC) voltage generated by a function generator is applied between the two ITO glass plates to generate a uniform field. When a projected light source illuminates the amorphous silicon layer, electron–hole pairs are excited, which decreases the impedance of the amorphous silicon layer by 4–5 orders of magnitude. When the AC voltage drops across the liquid layer inside the illuminated area, a nonuniform electric field is generated. When CNTs are exposed to this nonuniform electric field, a DEP force will be induced. In this study, a commercial liquid crystal display (LCD) projector is employed as the light source and a commercial animation editing software is used to generate light patterns (FLASH). Also, a ×50 objective lens is used to collect and to collimate the divergent projected light onto the a-Si layer. A major advantage of using this platform is its ability to easily modify the illuminated virtual electrodes with the software, making it capable of real-time and flexible manipulation of CNTs.

a The working principle for manipulation of CNTs by using optically induced dielectrophoresis. The illuminated light pattern excites electron–hole pairs in the photoconductive layer and thus decreases its corresponding electrical impedance, inducing a dielectrophoresis force which is used to manipulate CNTs. b When the light source and an AC voltage are switched on, CNTs will be attracted, trapped, and accumulated within the illuminated areas
2.2 Patterning of CNTs
The DEP force for nanotubes with a radius R, including CNTs, is modified and shown as follows using an elongated ellipsoid model (Jamshidi et al. 2008; Jones 1995):
where l denotes the length of the nanotubes, ε m represents the permittivity of the medium, E is the electric field, and \( \text{Re} ({\overline{K}}) \) is known as the real part of the Clausius–Mossotti (CM) factor.
In light of Eq. 1, whether \( \text{Re} ({\overline{K}}) \) is negative or positive determines the vector direction of the DEP force. In case \( \text{Re} ({\overline{K}} ) \) is a positive number, nanotubes will be attracted toward the place where the electric field intensity is much higher. On the contrary, if \( \text{Re} ({\overline{K}}) \) is a negative number, nanotubes will be repelled against the place having higher electric field intensity. These two kinds of DEP forces are termed positive and negative DEP force, respectively.
Figure 1b shows schematically how patterning of the CNTs is performed. Considering the permittivity of CNTs and the surrounding SDS medium, it is expected that most of the metallic CNTs will be attracted to the projected light patterns, while the semiconducting CNTs and other impurities will be left behind when a moving light pattern is used (Krupke et al. 2003). When the AC voltage is applied across the ITO plates and the light pattern is projected, CNTs in suspension around the illuminated area will experience a positive DEP force and thus align themselves within the pattern as shown in Fig. 1b. Note that both single and bundled CNTs are arranged nearby the illuminated area since it is difficult to obtain well-dispersed CNTs without bundle. As long as the external electric field and the light source continue to be focused on a small spot, the CNTs will accumulate at the spot, thus filling in the light pattern as designed.
2.3 Sorting and separation of CNTs
As mentioned above, CNTs in suspension are susceptible to experiencing a positive DEP force when they are subject to a nonuniform applied electric field. According to Eq. 1, the strength of this induced force is proportional to R 2 or l, indicating that CNTs with higher degree of bundle tend to undergo a stronger DEP force. Accordingly, it implies that postsynthesis CNTs dispersed in solution can be further sorted and separated by their degree of aggregation. A projected line pattern onto the chip is used to function as an optical grating. If CNTs are carried by a steady directional fluid whose speed is well controlled, they are bound to come across the optical grating we define properly in advance. Only CNTs with enough aggregation or bundles can undergo adequate DEP force and thus be attracted and reside at the optical grating, leaving well-dispersed CNTs passing through it. This approach has potential to divide postsynthesis CNTs into groups according to their degree of bundles so that well-dispersed CNTs solution is obtained.
2.4 Fabrication process
As can be seen in Fig. 1a, a 10-nm-thick molybdenum layer, acting as an adhesive and conductive layer, was first deposited onto a 1-mm-thick bottom ITO glass substrate. With the aid of plasma-enhanced chemical vapor deposition (PECVD) process, a 1-μm-thick a-Si was then deposited onto the adhesive layer. The a-Si layer served as a photoconductive material which was the primary element that introduced optical operation capability into our platform. By exploiting the advantages of optical operation, we can then flexibly reconfigure the patterns. The top ITO glass layer was then packaged with the bottom ITO substrate using a double-sided tape as a spacer. The thickness of the tape (approximately 30 μm) determined the gap between the top and bottom ITO layers along with the intensity of the actual electric field exerted within the platform during an AC voltage application. Note that fluidic inlet and outlet holes were fabricated in advance such that samples can be loaded.
2.5 Experimental setup
SDS, an anionic surfactant, has a tail of 12 carbon atoms attached to a sulfate group, giving the molecule the amphiphilic properties required as a surfactant. First, some amount of SDS was prepared and then dissolved in deionized water (DI) in a ratio so that the electrical conductivity of the solution formed was around 730 μS/cm. SWCNTs (Wah Lee Industrial Corporation, Taiwan) with purity not less than 90% were chosen as the solute in this study. SWCNTs of 5 mg (~2 nm in diameter and ~20 μm in length) were dispersed in 10 mL SDS solution. Since commercially available CNTs are hydrophobic and tend to bundle together, it is difficult to achieve well-dispersed CNTs. In an attempt to alleviate this issue, addition of SDS was adopted to enhance CNTs’ solubility in the solution. After mixing, the SWCNTs solution was ultrasonicated for 1 h to obtain more dispersed CNTs. Twenty μL of the solution was then injected into the ODEP chip using a pipette.
A commercial projector was used to illuminate designed light pattern as virtual electrodes onto the platform. Based on this operation, various operations such as collecting, patterning, and sorting of CNTs can be achieved through simply altering the light patterns via software. The experimental setup contained an image acquisition system to observe real-time manipulation of CNTs. To envision the virtual electrodes, a LCD projector (PJ1172, Viewsonic, Japan) with a spatial resolution of 1024 × 768 pixels was used as a light source to excite electron–hole pairs in the a-Si layer and decrease its electrical impedance. A ×50 objective lens (Nikon, Japan) was fixed between the projector and the ODEP chip to focus and collimate the projected light onto the chip to form virtual electrode patterns. A variety of patterns for different manipulation purposes were accomplished using FLASH, a commercial computer software which was generally used for animation production. The image acquisition system was placed on top of the chip to observe manipulation process. It consisted of a charge-coupled device (CCD, SSC-DC80, Sony, Japan) camera, an optical microscope (Zoom 125C, OPTEM, USA), and a computer equipped with an image acquisition interface card. The AC voltage was supplied by a function generator (Model 195, Wavetek, UK) and an amplifier (790 Series, AVC Instrumentation, USA). In this study, an AC power source with a frequency of 100 kHz and a magnitude of 20 Vpp was applied across the top and bottom layers to generate an electrical field.
3 Results and discussion
3.1 Patterning of CNTs in various forms
By changing the patterns through the FLASH software, CNTs can be patterned in any sequence to fill any form. Initially, as shown in Fig. 2a, CNTs are distributed randomly in the SDS medium between the gap. To collect these dispersed CNTs, they are first collected in 12 areas by using slowly advancing light patterns, which individually shrink to square shapes as shown in Fig. 2b. The original squares collectively cover the entire area in Fig. 2a and then slowly shrink to individual ones, ensuring that most CNTs can be collected. The 12 squares are then further moved toward the center and merged into a large square. As a result, the majority of the originally dispersed CNTs are gathered at the middle, as shown in Fig. 2c, while some impurities, which are not sensitive to the DEP forces, are left behind in the peripheral area. It is observed that there are still some CNTs adhering onto the surface. Due to the huge surface area of a CNT and the drag force it experiences when immersed in the SDS medium, some CNTs may develop a large sticky force to the platform surface, which cannot be easily overcome by the ODEP force. Notably, metallic CNTs are more responsive to the DEP force than the semiconducting CNTs (Krupke et al. 2003). Both metallic and semiconducting CNTs are typically grown together as bundles. Moreover, whether an individual CNT is metallic or semiconducting is strongly associated with its chirality, which is a random parameter that cannot be specifically controlled in mass production. Consequently, it is reasonable to expect that the specimen we prepared is composed of mostly metallic and semiconducting CNTs together with some impurities. Since the sample purity is not less than 90%, the fraction of the CNTs unresponsive to the ODEP force is estimated to be 15%.

The collection and manipulation of CNTs patterning with various illuminated layouts is performed. a–c The originally dispersed CNTs are collected in multiple square areas. The side of each square is around 30 μm. d Six lines composed of CNTs are formed. The width of each CNT lines is 8–10 μm. e Four letters, “NCKU”, are formed based on manipulation of CNTs. f Dense-distributed CNTs are gathered at the grid intersections
In addition to using square patterns, moving CNTs into different layouts can be performed by simply changing the light patterns. For example, in Fig. 2d, six illuminated lines form six lines of CNTs. The width of each line is approximately 8–10 μm. The density of CNTs patterning can be indirectly estimated. In sample preparation, 5 mg of CNTs was dispersed in 10 mL SDS medium and then sonicated for mixing. Twenty μL of the formed solution was then loaded into the ODEP chip. The area of the channel for manipulation is 24 mm × 3 mm (7.2 × 10−5 m2). The actual manipulation area, which is defined by the illuminated light spot on the platform, is 7.9 × 10−7 m2, which accounts for only 1.1% of the whole channel area. In the foregoing paragraph, we have estimated that 15% of the prepared CNTs specimen is unresponsive to the ODEP force. Therefore, there are 1.56 × 10−5 mg CNTs participating in the formation of each line pattern in Fig. 2d. The area of each line pattern is approximately 231 μm × 9 μm, which results in 2.079 × 10−9 m2. The density is then calculated to be 7.504 × 10−9 mg/μm2.
More complicated patterns can be also formed by using a similar approach. For instance, Fig. 2e shows the letters “NCKU” each with a line width of about 5 μm. It is also found that an intersecting checkerboard pattern will produce a higher density of CNTs collected at the overlapping sites due to the elevated electric field gradient, as shown in Fig. 2f. These results may enable fabrication of integrated CNTs circuits and CNTs sensor arrays featuring uniform and well-controlled CNT line alignment. Note that the ODEP platform allows for a parallel alignment if multiple light patterns are projected simultaneously, which may be a promising approach for high-throughput assembly and patterning of the CNTs. However, whether the image of CNTs patterns could be reserved after removing the liquid solution is a critical issue concern before it can be used for many practical applications. It was reported that the position and orientation of the OET-trapped NWs can be reserved by using photocurable polymers (Jamshidi et al. 2008). After exposure of UV light on the manipulation area, the trapped NWs will be immobilized in the polymer matrix within seconds. Similar approach may be adopted to tackle this issue for CNTs.
The minimum line width defined by this ODEP platform is approximately 5 μm. By adopting a higher power projector and better optical setup to define the pattern, this minimum line width can be lowered.
3.2 Dynamic movement of CNTs patterning
In addition to patterning of the CNTs, this ODEP platform is also capable of real-time movement of specific assembled patterns as well. Figure 3a shows four CNTs patterns. Specifically, a square, a star, a circle, and a triangle are formed using the ODEP force. Note that this photograph is taken when the light source is blocked. The four light patterns are then rotated clockwise to force those CNTs trapped in the original patterns to move accordingly. The speed of this rotation process needs to be well controlled; otherwise, the CNTs are not able to follow the movement of the patterns. To compensate for the viscous dragging force on the CNTs, the rotation speed is optimized at around 3 μm/s. Once the rotation speed is higher than this value, CNTs cannot follow the movement and will thus be left behind. As shown in Fig. 3c, these four CNTs patterns are shifted clockwise from their previous locations. Figure 3d and e presents the final results of this rotation process. When the light source is blocked for tens of seconds, the established patterns disappear and the CNTs are again dispersed randomly in the medium as shown in Fig. 3f.

A series of photographs showing the real-time movement of specific CNT patterns. a Four CNTs patterns, specifically a square, a star, a circle, and a triangle, are formed using the ODEP. b Light patterns are projected onto the CNTs patterns. c–e These patterns are rotated clockwise. f Once the light source is blocked, the established CNTs patterns slowly disappear due to diffusion
3.3 Sorting and separation of CNTs using optical grating
Another promising application of this ODEP platform is sorting and separation of CNTs by using various characteristics of CNTs such as their electronic structure (Hersam 2008; Krupke et al. 2003) or the degree of aggregation. In this study, well-dispersed and aggregated CNTs can be separated. As shown in Fig. 4a, CNTs with different levels of aggregation are first distributed randomly in the medium. A line pattern is projected as an optical grating. Then a steady fluid flow is applied so that the CNTs are driven downward. The more aggregated they become, the higher the ODEP force they experience. Once they reach the line pattern, only CNTs above an aggregation threshold are trapped and confined within the line as shown in Fig. 4b. As the process continues, nearly all aggregated CNTs reside at the optical grating, while other well-dispersed CNTs pass through the grating as shown in Fig. 4c. The flow speed is then progressively decreased, and this continues to bring CNTs above the light to undergo the separation process. An illuminated circle is used to collect well-dispersed CNTs below the line. As observed in Fig. 4d, the originally well-dispersed and invisible CNTs below the line are gathered within the illuminated circle until they eventually become visible. This approach may be promising for further purification of postsynthesis CNTs since many existing methods for CNT synthesis produce impurities and the sizes and properties of the resulting CNTs vary significantly.

A series of photographs showing the separation process for dispersed and aggregated CNTs. a The CNTs are initially dispensed in the medium. b The ODEP force is applied by the projected line to collect aggregated CNTs when a downward fluid flow is applied. The aggregated CNTs experience larger ODEP forces and can be trapped with the line. c The flow speed is progressively decreased which continues to bring CNTs above the light to undergo the separation process. The illuminated circle is used to collect well-dispersed CNTs below the line. d The originally well-dispersed and invisible CNTs below the line are gathered within the illuminated circle and eventually accumulate to a point where they become visible
The trapping power required for the accumulation experiments is dependent on several parameters. First, the higher the flow speed is, the higher trapping power it requires to attract and trap the moving CNTs. Initially, a syringe pump is used to inject the CNTs specimen into the ODEP chip. The gap (spacer) between the top ITO layer and the bottom a-Si layer, which is determined by a double-sided tape, is 30 μm. The width of the channel is around 3 mm. The cross-sectional area is thus 3 mm × 30 μm (9 × 104 μm2). The flow rate of the syringe pump is set at 2,000 μL/h. Therefore, the flow speed can be directly calculated to be ~6.17 μm/s. As expected, the amount of CNTs accumulation will be reduced if the flow speed is increased without enhancement of the trapping power. For aggregated CNTs, they experience higher ODEP force when compared with dispersed CNTs. Accordingly, to trap well-dispersed CNTs, much higher trapping power should be provided.
The required trapping power for CNTs accumulation can be calculated from the threshold ODEP force needed to attract and trap CNTs when a flow speed is supplied. The ODEP force can be adjusted by altering the optical intensity of the system, the AC voltage and the frequency applied across the ODEP chip, and the permittivity of the suspension medium. The intensity of full-powered white light from the projector, which is a sum of RGB signals, is measured to be 6.82 W/cm2 right after the objective lens. In an attempt to generate maximum ODEP force to manipulate CNTs, the full-powered white light is used to illuminate patterns on the platform. The induced ODEP force is increased with the increasing applied AC voltage. It is found that the applied frequency should be kept at a low value to ensure a higher ODEP force. Since the hydrolysis occurs at a frequency less than 80 kHz, the driving frequency and applied voltage have been determined to be 100 kHz and 20 Vpp, respectively. These parameters have been optimized to obtain maximum ODEP force. The light intensity required to trap CNTs is then characterized as a function of the flow speed, as shown in Fig. 5. It is found that the required light intensity (and ODEP force) increases with the increasing flow speed.

The relationship between the required light intensity to trap CNTs and the corresponding flow speed. As predicted, the higher the flow speed is, the higher light intensity is required to attract and trap the CNTs
The ODEP platform is particularly suitable for manipulation of nanoscale materials, especially CNTs. First of all, most of the cases concerning the nanomaterials applications are involved with extremely tiny electrodes for arrangement, meaning that a considerable electric field gradient, that is, nonuniformity, can be generated at specific sites on the chip when an external electric potential is applied. The light patterns designed through FLASH, acting as virtual electrodes, are just the counterpart of conventional electrodes used for CNTs arrangement. Achieving large amount of nonuniformity around the illuminated areas, these small virtual electrodes produce much greater DEP force to manipulate CNTs in suspension. Second, the nearly one-dimensional constructive structure of CNTs makes them especially prone to polarization along the long axis. These two aspects can be used to enhance the power of the ODEP platform for transporting, arranging, positioning, sorting, and separating CNTs.
4 Conclusions
In this study, we have demonstrated a versatile, optically driven platform which can efficiently manipulate CNTs using a DEP force. The major advantage of this platform over other conventional approaches engaged with CNTs manipulation is that, by using programmed light patterns as virtual electrodes, several modes of real-time manipulation and patterning of CNTs can be realized without the need for fabricating metal electrodes. The developed platform can be further extended for patterning of CNT-based nanosensors and nanocircuits, postsynthesis processing of CNTs, and other applications requiring efficient manipulation of CNTs.
Abbreviations
- a-Si:
-
Hydrogenated amorphous silicon
- AC:
-
Alternating current
- CCD:
-
Charge-coupled device
- CM:
-
Clausius–Mossotti
- CNTs:
-
Carbon nanotubes
- DEP:
-
Dielectrophoretic
- DI:
-
Deionized
- E :
-
Intensity of the applied electric field
- F dep :
-
Dielectrophoretic force
- ITO:
-
Indium-tin-oxide
- \( \overline{K} \) :
-
Clausius–Mossotti factor
- LCD:
-
Liquid crystal display
- MWCNTs:
-
Multi-walled carbon nanotubes
- ODEP:
-
Optically induced dielectrophoretic
- OET:
-
Optoelectronic tweezers
- OT:
-
Optical tweezers
- PECVD:
-
Plasma-enhanced chemical vapor deposition
- R :
-
Radius of the submicron spherical particle
- SDS:
-
Sodium dodecyl sulfate
- SWCNTs:
-
Single-walled carbon nanotubes
- l :
-
Length of the nanotubes
- ε m :
-
Electrical permittivity of the surrounding buffer
References
Arnold MS, Green AA, Hulvat JF, Stupp SI, Hersam MC (2006) Sorting carbon nanotubes by electronic structure using density differentiation. Nat Nanotechnol 1:60–65
Baughman RH, Zakhidov AA, de Heer WA (2002) Carbon nanotubes—the route toward applications. Science 297:787–792
Chan RHM, Fung CKM, Li WJ (2004) Rapid assembly of carbon nanotubes for nanosensing by dielectrophoretic force. Nanotechnology 15:S672–S677
Chen Y, Shaw DT, Bai XD, Wang EG, Lund C, Lu WM, Chung DDL (2001) Hydrogen storage in aligned carbon nanotubes. Appl Phys Lett 78:2128–2130
Chiou PY, Ohta AT, Wu MC (2005) Massively parallel manipulation of single cells and microparticles using optical images. Nature 436:370–372
Choi WB, Jin YW, Kim HY, Lee SJ, Yun MJ, Kang JH, Choi YS, Park NS, Lee NS, Kim JM (2001) Electrophoresis deposition of carbon nanotubes for triode-type field emission display. Appl Phys Lett 78:1547–1549
Dillon AC, Heben MJ (2001) Hydrogen storage using carbon adsorbents: past, present and future. Appl Phys A 72:133–142
Fan Z, Ho JC, Jacobson ZA, Yerushalmi R, Alley RL, Razavi H, Javey A (2008a) Wafer-scale assembly of highly ordered semiconductor nanowire arrays by contact printing. Nano Lett 8(1):20–25
Fan Z, Ho JC, Jacobson ZA, Razavi H, Javey A (2008b) Large-scale, heterogeneous integration of nanowire arrays for image sensor circuitry. Proc Natl Acad Sci USA 105:11066–11070
Grier DG (2003) A revolution in optical manipulation. Nature 424:810–816
Grobert N (2007) Carbon nanotubes—becoming clean. Mater Today 10:28–35
Hersam MC (2008) Progress towards monodisperse single-walled carbon nanotubes. Nat Nanotechnol 3:387–394
Hwang H, Choi YJ, Choi W, Kim SH, Jang J, Park JK (2008) Interactive manipulation of blood cells using a lens-integrated liquid crystal display based optoelectronic tweezers system. Electrophoresis 29:1203–1212
Iijima S (1991) Helical microtubules of graphitic carbon. Nature 354:56–58
Jamshidi A, Pauzauskie PJ, Schuck PJ, Ohta AT, Chiou PY, Chou J, Yang P, Wu MC (2008) Dynamic manipulation and separation of individual semiconducting and metallic nanowires. Nat Photonics 2:86–90
Jones TB (1995) Electromechanics of particles. Cambridge University Press, Cambridge
Jorio A, Dresselhaus G, Dresselhaus MS (2008) Carbon nanotubes. Springer, Berlin
Krupke R, Hennrich F, von Löhneysen H, Kappes MM (2003) Separation of metallic from semiconducting single-walled carbon nanotubes. Science 301:344–347
Liu Z, Shen Z, Zhu T, Hou S, Ying L, Shi Z, Gu Z (2000) Organizing single-walled carbon nanotubes on gold using a wet chemical self-assembly technique. Langmuir 16:3569–3573
Nagahara LA, Amlani I, Lewenstein J, Tsui RK (2002) Directed placement of suspended carbon nanotubes for nanometer-scale assembly. Appl Phys Lett 80:3826–3828
O’Connell MJ, Eibergen EE, Doorn SK (2005) Chiral selectivity in the charge-transfer bleaching of single-walled carbon-nanotube spectra. Nat Mater 4:412–418
Pauzauskie PJ, Yang P (2006) Nanowire photonics. Mater Today 10:36–45
Roschier L, Tarkiainen R, Ahlskog M, Paalanen M, Hakonen P (2002) Manufacture of single electron transistors using AFM manipulation on multiwalled carbon nanotubes. Microelectron Eng 61–62:687–691
Seo HW, Han CS, Choi DG, Kim KS, Lee YH (2005) Controlled assembly of single SWNTs bundle using dielectrophoresis. Microelectron Eng 81:83–89
Seo HW, Han CS, Jang WS, Park J (2006) Manipulation of carbon nanotubes and nanowires. Curr Appl Phys 6S1:e216–e219
Suehiro J, Zhou G, Hara M (2003) Fabrication of a carbon nanotube-based gas sensor using dielectrophoresis and its application for ammonia detection by impedance spectroscopy. J Phys D Appl Phys 36:L109–L114
Tan S, Lopez HA, Cai CW, Zhang Y (2004) Optical trapping of single-walled carbon nanotubes. Nano Lett 8:1415–1419
Tasis D, Tagmatarchis N, Bianco A, Prato M (2006) Chemistry of carbon nanotubes. Chem Rev 106:1105–1136
Trojanowicz M (2006) Analytical applications of carbon nanotubes: a review. Trends Anal Chem 25:480–489
Xia Y, Yang P, Sun Y, Wu Y, Mayers B, Gates B, Yin Y, Kim F, Yan H (2003) One-dimensional nanostructures: synthesis, characterization, and applications. Adv Mater 15:353–389
Yamamoto K, Akita S, Nakayama Y (1998) Orientation and purification of carbon nanotubes using ac electrophoresis. J Phys D Appl Phys 31:L34–L36
Yerushalmi R, Jacobson ZA, Ho JC, Fan Z, Javey A (2007) Large scale, highly ordered assembly of nanowire parallel arrays by differential roll printing. Appl Phys Lett 91:203104
Acknowledgments
The authors would like to thank the National Science Council in Taiwan for their financial support. Valuable discussion regarding the preparation of CNT samples with Dr. Wen J. Li is greatly appreciated.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lee, MW., Lin, YH. & Lee, GB. Manipulation and patterning of carbon nanotubes utilizing optically induced dielectrophoretic forces. Microfluid Nanofluid 8, 609–617 (2010). https://doi.org/10.1007/s10404-009-0492-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10404-009-0492-8