
Abstract
Cooperative hunting is a cognitively challenging activity since individuals have to coordinate movements with a partner and at the same time react to the prey. Domestic dogs evolved from wolves, who engage in cooperative hunting regularly, but it is not clear whether dogs have kept their cooperative hunting skills. We presented pairs of dogs with a reward behind a fence with two openings in it. A sliding door operated by the experimenter could block one opening but not both simultaneously. The dogs needed to coordinate their actions, so that each was in front of a different opening, if one of them was to cross through and get food. All 24 dog pairs solved the problem. In study 1, we demonstrated that dogs understood how the apparatus worked. In study 2, we found that, although the performance of the pairs did not depend on the divisibility of the reward, pairs were quicker at coordinating their actions when both anticipated rewards. However, the dogs did not monitor one another, suggesting that their solutions were achieved by each individual attempting to maximize for itself.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Individuals in numerous species coordinate their actions toward common goals such as building shelters, acquiring food and mates, or protecting conspecifics and the territories that they inhabit (e.g., lions: Heinsohn and Packer 1995; siamangs: Geissmann and Orgeldinger 2000; chimpanzee: Mitani 2006; Magpie-larks: Magrath et al. 2007). Hunting for mobile prey is perhaps one of the most challenging activities from the point of view of coordination since not only do individuals have to coordinate their own movements but they also have to react to (and even anticipate) the prey’s actions (e.g., chimpanzees: Boesch and Boesch-Achermann 2000; wolves: Mech and Boitani 2003; wild dogs: Creel and Creel 2002; lions: Stander 1992; hyenas: Mills 1990; dolphins: Gazda et al. 2005; groupers and moray eels: Bshary and Grutter 2006). For example, chimpanzees of the Tai forest hunting for monkeys coordinate their positions within the trees in order to surround their prey. While one chimpanzee actively pursues the monkey, other chimpanzees take positions in nearby locations that effectively reduce the monkey’s escape routes (Boesch and Boesch-Achermann 2000). Since the success of a chimpanzee hunting alone in the Tai forest is low, it pays for chimpanzees to hunt together (Boesch 1994). Thus, the more chimpanzees hunt together, the better they organize themselves and the higher the rate of success (Boesch and Boesch-Achermann 2000).
One question that arises when animals coordinate their actions is whether they know their partners’ roles and intentions or whether they independently but simultaneously direct similar actions toward the common goal (Melis and Semmann 2010). In particular, when chimpanzees perform different roles, do they realize that they are acting together to achieve a common goal, that is, to catch the monkey? It is conceivable that chimpanzees view their partners as social tools to reach their individual goals (Melis and Semmann 2010; Warneken and Tomasello 2006). It is even possible that group hunts may simply consist of the independent, yet simultaneous, actions of a number of individuals who have little understanding of the roles of others (Melis et al. 2006a, b; Tomasello and Call 1997). Thus, each individual could simply assess the state of the chase at a given moment and decide what it is best for it to do (Tomasello et al. 2005).
A number of recent experimental studies have addressed the question of what animals, and in particular primates, know about their partners’ roles and goals in cooperative tasks. In most of these studies, pairs of subjects are confronted with a food retrieval task in which the food is placed on a platform that is out of reach of the subjects. To be able to get the food, subjects have to cooperate by simultaneously pulling a rope. Chimpanzees can coordinate their pulling efforts, but tolerance acts as an important constraint on their ability to solve this problem. Thus, pairs of chimpanzees that share food outside the test context cooperate much better than chimpanzees that do not share food (Melis et al. 2006a, b). Bonobos are more successful than chimpanzees at solving this problem, and Hare et al. (2007) have proposed that this is due to bonobos’ higher tolerance levels compared with chimpanzees. Moreover, there is strong evidence that chimpanzees have some knowledge about the role of the partner in this cooperative task (Hirata and Fuwa 2007; Melis et al. 2006a, b). They recruit a partner only when solving the problem requires collaboration, and they recruit the best collaborator (Melis et al. 2006a, b). They even coordinate their actions when there is a conflict of interests between partners about which food tray they should take—one with equal payoffs and one with unequal payoffs (Melis et al. 2009).
Recent studies have begun to address the question of animal cooperation from an experimental perspective in non-primates as well. Seed et al. (2008) found that rooks are able to coordinate their actions to pull a string attached to a food platform. However, it was unclear that these rooks knew that they needed a partner to succeed because they did not wait for their partner before pulling and they did not select the appropriate apparatus depending on whether or not the partner was present. Drea and Carter (2009) also found that spotted hyenas coordinate their actions temporally and spatially in a pulling task. As in chimpanzees and rooks, the performance of the hyenas depended on the relationship between partners—it decreased with rank-related aggression. However, unlike rooks, but like chimpanzees, the hyenas attended to each other and experienced cooperators modified their behavior to accommodate naïve subjects (Drea and Carter 2009).
One conspicuous difference between studies on human and non-human animals is the virtual absence of communicative exchanges between non-human partners either before or during the task. Thus, chimpanzee dyads tested in a stag hunt game were able to coordinate their actions to obtain the option considered to be of higher value. But instead of communicating to decide what option to select, they used a leader–follower strategy in which one partner took the lead and the other followed (Bullinger et al. 2011). Warneken et al. (2006) also found that chimpanzees participated successfully in cooperative problem-solving activities with an adult human partner. However, when the human stopped participating, the apes did not attempt to reengage him. The authors concluded that the chimpanzees used a coordinated strategy in order to achieve their own goal but had not formed a shared goal with the human (Warneken et al. 2006). Taken together, these findings suggest that when chimpanzees cooperate with others, they take their partners’ role into consideration, but they seem not to form shared goals with others.
Virtually, all experimental studies on animal cooperation have used a method in which the prey is non-reactive, and therefore, the need for communication may be greatly reduced. As a consequence, we investigated whether coordination and, more importantly, communication would appear within pairs of dogs in a task in which the prey was responsive to the behavior of the partners. We selected dogs, because they are social carnivores. A number of social carnivores are reported to hunt cooperatively (see above), especially dogs’ closed living relatives, wolves (Coppinger and Coppinger 2001; Mech 1970; Mech and Boitani 2003). In addition, domestic dogs might have been selected for cooperating with the humans, although it is unclear how much of their cooperative behavior is trained (Miklosi 2007; Naderi et al. 2001; Ruusila and Pesonen 2004).
To investigate how dogs coordinated their actions toward a common goal, we presented pairs of dogs with an apparatus that simulated a hunting situation in which the prey defended itself from the dogs’ advances. Food placed behind a fence could be accessed by two openings in the fence. A sliding door operated by the experimenter could block either opening, but not both simultaneously. As a result, the dogs needed to coordinate their actions in order to bypass the door, reach the other side of the fence through the openings and get the food. We investigated whether (1) dogs could coordinate their actions to solve this problem, (2) their problem-solving abilities depended on the divisibility of the reward, and (3) dogs shared the effort involved in solving the problem.
Experiment 1: “One defense move only”
In Experiment 1, we wanted to investigate whether dogs are able to coordinate their actions to solve the problem and whether they understood how the apparatus worked. To make the task for the dogs as manageable as possible, the sliding door was moved only once.
Methods
Subjects
Twenty-four dogs (13 males and 11 females) of various breeds and ages (range 1–12 year olds) participated in this study (see Table 1). All subjects had been living as pets with their owners and had received the normal obedience training typical for domestic dogs. Dogs were registered in our database, and the owners decided voluntarily to take part in the study. During the test, dog owners were not present and were informed about the design of the study only after their dogs were tested. The 24 dogs were tested in 12 predetermined pairs. The dogs in each pair were familiar with each other. They met each other at least once a week, although in most cases they lived in the same household.
The preconditions for participating in this study were that (1) dogs were comfortable without the owner, (2) both partners of a pair passed the pretest, (3) dogs were within the 1–12 year age range, and (4) no serious fight between the partners occurred during testing.
Materials
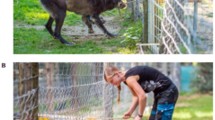
Figure 1a and b depicts the apparatus, consisting of a cage (300 cm × 620 m) with a sliding door and two fences. The walls of this cage were covered with material made of straw so that dogs were not distracted, and the experimenters could look through it in order to move the doors.

Setup for Experiment 1 and 2. In the Non-Shareable condition, there was one food container in the middle (a, b). In the Shareable condition, there were two food containers that stood left and right behind the openings (b)
The cage was divided into two parts by a central fence with two openings that could be blocked by a sliding door. The dog entrance (60 cm × 77 cm) was located on one side of the cage and could be opened from outside the apparatus by the Experimenter 2. The central sliding door could be moved from outside the apparatus by Experimenter 1 with a bar so that one of the openings in the fence could be blocked (but not both simultaneously). An additional dividing fence, perpendicular to the sliding door, increased the distance the dogs needed to cover in order to go from one opening to the other. On the furthest side of the central fence (opposite the dog entrance) was either one container with food in the middle (Non-Shareable condition) or two containers, one left and one right (Shareable condition). Experimenter 1 could enter to bait the containers from this side of the cage. All fencing, including the sliding door and access doors, was made of mesh or Plexiglas and was therefore transparent. To define when a dog was approaching the opening, there was a marking line on the floor, parallel to the central fence, ca. 30 cm away from it. We used dog sausages and dry dog food as a reward.
Procedure
Dominance test
This test had two aims. First, we wanted to know whether one individual within the pair would monopolize the food, and if so, which. Second, we wanted to exclude pairs with aggressive interactions in a food competition context. The dominance test took place before the experimental test sessions began. The two dogs stood opposite each other at a distance of 2 m. Each dog was held by the collar by Experimenter 1 and Experimenter 2. A piece of food was placed on the floor at a point equidistant to both dogs. The dogs were released simultaneously so that they could approach the food. We scored which animal got the food; in the event of an aggressive interaction, the pair was excluded from the study. We conducted this test eight times. The dog that got the food in over half of the trials was considered the dominant individual. There was always a dominant individual, and in most pairs, the dominance was very clear, in as much as the subordinate got nothing or just one piece of food.
Training and pretest
Training was necessary as previous studies have shown that dogs have some problems solving detour tasks spontaneously, but they can easily learn to approach a reward behind a fence (Mersmann et al. 2011; Pongracz et al. 2003). Dogs were trained individually to acquaint them with the apparatus and the procedure. In the first step, dogs were allowed to explore the apparatus for 10 min. The Experimenter 1 moved the sliding door back and forth and put food into the container. In the second step, the dogs were trained to pay attention to the sliding door while approaching the reward. They were sent into an adjacent cage, outside the apparatus. As in the test, Experimenter 1 baited the food. Then, the dog’s entrance was opened, so that the dog could enter the apparatus and approach the food. In contrast to the test, the door was not moved. This training trial was repeated, and which side of the middle fence was left open was varied. To pass the pretest, the dog had to approach the food directly through the unimpeded opening to four trials in a row, twice through the right side and twice through the left side. The dogs which passed the pretest in this study did so after a mean of 18 trials. Dogs that did not pass the pretest within 38 possible training trials were not included in the study.
Test
At the beginning of each trial, both members of the dog pair waited outside the apparatus in an adjacent cage. From the dogs’ point of view, they could see Experimenter 1 move the sliding door over to their right-hand side leaving the left section of the sliding fence open.
Then, Experimenter 1 entered the apparatus from the human entrance. She went to the unblocked opening, showed the two rewards to the dogs and then put them into the container(s), depending on the condition. In the Shareable condition, Experimenter 1 put two pieces of food in a container behind the central fence on the left-hand side and two pieces in the container on the right-hand side. In the Non-Shareable condition, she put two pieces of food into just one container that stood behind the central fence in a central location.
Experimenter 1 went outside the cage to where she could handle the sliding door. Then, Experimenter 2 opened the dog entrance. As soon as one dog approached the opening, Experimenter 1 blocked it with the sliding fence while simultaneously leaving the other opening accessible. Experimenter 1 only ever operated the sliding fence once. Thus, when a dog approached the left open door, this door was shut. The dog had to run around the perpendicular fence to get to the right door that was open now. A dog approach was defined as crossing a line marked on the floor, that was parallel to and 50 cm away from the sliding fence, in front of the open door. The trial finished either when a dog passed through one of the openings and accessed the reward, or after 70 s had elapsed since the beginning of the trial. If the dogs did not solve the problem within 70 s, Experimenter 2 removed the rewards. After the end of the trials, both dogs were sent back through the dog entrance into the adjacent cage, and the next trial started.
Six of the dog pairs were tested in the Shareable condition, and six pairs were tested in the Non-Shareable condition. Each pair was tested for 60 trials, presented on 3 days so that they received 20 trials per day. After five consecutive trials, there was always a break of at least 10 min in which subjects could leave the testing area.
Data analysis
We scored four dependent variables: success, latency to succeed, food consumed and effort. The behaviors were defined and scored as follows:
Success the number of trials in which at least one dog managed to cross to the other side of the fence within 70 s.
Latency the number of seconds that elapsed from the moment that the dog entrance was opened until the first dog managed to cross the fence.
Eating the number of trials in which each subject ate food by putting the head into the container. For each dog pair, we calculated a food sharing index associated with this measure. This index was computed as the total number of pieces obtained by the partner who obtained the smallest number of pieces divided by the number of total pieces obtained by the other partner.
Effort the number of trials in which each subject elicited the moving and opening of the sliding door by crossing the marking line near the left opening side of the central fence. We also looked for communicative exchanges between dogs, but we detected no behaviors that could be evaluated.
A second independent observer who did not know the purpose of the study scored a randomly selected sample of trials (20 %). Reliability was excellent (Problem solving: Cohen’s κ = 1.00; Latency: Spearman correlation r s = 0.96, N = 178; Eating of the dominant pair member Cohen’s κ = 0.98/of the subordinate pair member Cohen’s κ = 0.98; Effort of the dominant pair member Cohen’s κ = 0.98/of the subordinate pair member Cohen’s κ = 0.97; N = 180 for all Cohen’s κ).
For our statistical analyses, we used the Mann–Whitney U Test, Spearman correlation, Fisher’s omnibus test (see Haccou and Meelis 1994) and Kendall τ coefficient of partial correlation (all two-tailed). With the latter, we correlated the behavior of one pair member with a measure of the pair’s performance, while controlling for the behavior of the other pair member.
Results
Tables 2 and 3 summarize the results. The 12 dog pairs solved the problem in 95 % of the trials. There was no significant difference between conditions in the latency to solve the problem (Mann–Whitney U = 13.0, n1 = 6, n2 = 6, P = 0.485). However, it turned out that some pairs in the Shareable condition did not share the food. There was no significant difference between conditions in the sharing index (Mann–Whitney U = 11.0, n1 = 6, n2 = 6, P = 0.261). We therefore analyzed whether pairs that shared more often (defined by the sharing index) would solve the problem faster (defined by latency), but there was no such correlation (Spearman r s = 0.004, P = 0.991, N = 12).
However, the problem was solved faster the more food was obtained by the subjects who got more food over all trials: the correlation between the number of trials on which these subjects got food and the latency to problem solution was negative and approached significance (Kendall’s partial τ = −0.444, P = 0.053, N = 12). In contrast, the corresponding correlation for the pair member who got less food over all trials was not significant (Kendall’s partial τ = 0.081, P = 0.719, N = 12).
We then looked at the correlations within individual pairs between latency to success and trial number; these are included in Tables 2 and 3. Note that here we included also the trials in which the problem was not solved, in which case we scored 70 s latency. We found three different patterns. Four pairs grew significantly slower at solving the problem (two in each condition) and two pairs grew faster at solving the problem (one in each condition). For the other pairs, we found no correlations, some of them being very fast in nearly all trials (for example, Bajo–Ali who solved the problem within 6 s on average) or showed irregular patterns (for example, Wilbur–Bruno). Fisher’s omnibus test (χ 2 = 77.65, df = 24, P < 0.001) showed that the distribution of these correlations differed from the null hypothesis that all correlations were zero.
We looked additionally at whether the problem was solved faster depending on the effort (approaching and waiting at one door so that the sliding door was moved and the other subject could get through the other door) of each member of the pair. We found that the latency to solve the problem depended on how much effort was invested by the individual that invested more effort in a pair. Thus, the problem was solved faster the more often this individual opened the door (number of trials with effort for the member with more effort versus latency: Kendall’s partial τ = −0.670, P = 0.002, N = 12). Only one pair shared the effort equally (Alina–Franzel), whereas in 7 pairs one partner opened the door in most of the trials.
Interestingly in the Non-Shareable condition, 11 out of 12 subjects sometimes opened the door for themselves when the partner did not approach the food immediately. In that case, these subjects went to the left open door so that it was shut and then went to the right door and grabbed the food before the partner approached. Thus, it was possible for them to solve the problem without a partner because the door only moved once.
Discussion
All pairs of dogs were able to solve the problem and get the reward in nearly all trials. The pairs showed different patterns independent of whether the food was shareable or not. Surprisingly, they did not solve the problem better (i.e., faster and more often) when they shared more food. However, as the door was moved only once it was possible to open the door without a partner. In some pairs, especially in the Non-Shareable condition, one subject stopped participating and did not enter the apparatus after a few trials in which she/he did not get the food. But then the other subject started to open the door for herself and solved the problem without the partner. Moreover, after a few trials, most dogs hesitated when it came to crossing the marking line in front of the open door. They approached the open door slowly and often stopped before the marking line and ran back to the—still closed—door. This suggests that they had learned that the sliding door would move. These two facts that dogs hesitated at the marking line in front of the open door and that they sometimes opened the door for themselves suggest that they knew how the apparatus worked. Whether subjects also understood the role of the partner (for example, that the partner could approach the reward earlier when the subject paid the effort) remains an open question.
Interestingly, the distribution of effort between the dogs in a pair was generally unequal. In most trials with a given pair, it was the same subject who approached the left door so that the sliding door was moved. However, it is impossible to draw the conclusion that pairs did not share the effort equally, because it was also possible for both partners to commit the same amount of effort (when both approached the left door) or for one dog to make the effort, but also take the whole reward, as she/he opened the door for her/himself.
Experiment 2: “Variable defense moves”
In Experiment 2, we changed the procedure so that the problem could not be solved without a partner.
Methods
Subjects
Twenty-four dogs (10 males and 14 females) of various breeds and ages (range 1–7 year olds) that were not tested in Experiment 1 participated in Experiment 2 (see Table 1). The preconditions for participating in this study were the same as in Experiment 1: subjects had been living as pets, owners were not present during the test, the dogs were tested in 12 pairs, and the pair members were familiar with each other.
Materials
We used the same apparatus as in Experiment 1 (See Fig. 1).
Dominance test, training and pretest
The procedure of the dominance test, training and pretest were the same as in Experiment 1.
Procedure
The basic procedure was the same as in Experiment 1.
There were two differences: First, at the beginning of the trial, the sliding door could either be on the left side so that the right side of the central fence was open or be on the right side so that the left side of the central fence was open. Second, by moving the sliding door back and forth, Experimenter 1 tried to prevent the dogs from crossing the central fence. As soon as one dog approached the opening by crossing the line on the floor (that was parallel and 50 cm away from the sliding fence), Experimenter 1 blocked it with the sliding fence, which simultaneously left the other opening accessible. When both dogs crossed the line simultaneously on both sides, the sliding door was moved once so that the door was closed in front of the dog that had approached the open side, which meant that the other dog could slip through the opening. Dogs could only solve the problem by coordinating with each other so that each approached the central fence on a particular side.
As in Experiment 1, the problem was solved when one dog managed to pass through the central fence. Experimenter 1 then stopped moving the sliding door so that the other dog could approach the reward. A trial was over once the dogs had solved the problem or after 70 s. Again, there were the same two conditions. Six of the pairs were tested in the Shareable condition, and six pairs were tested in the Non-Shareable condition, and all pairs received 60 trials.
Data analysis
As in Experiment 1, we scored Problem solving, Latency, and Eating and Effort, and we used the same definitions. In addition, we looked for communicative behavior of the dogs directed at each other, but we could not detect any behaviors for evaluation.
A second independent observer who did not know the purpose of the study scored a randomly selected sample of trials (20 %). Reliability was excellent (Problem solving: Cohen’s κ = 0.97; Latency: Spearman correlation r s = 0.97; Eating of the dominant pair member Cohen’s κ = 0.98/of the subordinate pair member Cohen’s κ = 0.96; Effort of the dominant pair member Cohen’s κ = 0.96/of the subordinate pair member Cohen’s κ = 0.98; N = 180 for all measures). We used the same statistical analyses as in Experiment 1.
Results
The 12 pairs solved the problem in 90 % of the trials within 70 s. Tables 4 and 5 summarize the results. There was no significant difference between conditions in the latency to solve the problem (Mann–Whitney U = 11.0, n1 = 6, n2 = 6, P = 0.310). As in Experiment 1, some pairs in the Shareable condition often failed to share. However, in contrast to Experiment 1, they shared significantly more often in the shareable compared with the Non-Shareable condition (sharing index: Mann–Whitney U = 4.0, n1 = 6, n2 = 6, P = 0.026). But surprisingly it was not the case that pairs that shared more solved the problem significantly faster (sharing index versus latency: Spearman r s = −0.55, P = 0.067, N = 12).
In nearly all pairs, one partner usually invested the effort by approaching and waiting at one door so that the sliding door moved and the other subject could get through the open door (for two pairs even in 100 % of the trials). The latency to solve the problem depended on how much effort was invested by the individual that tended to invest more effort in a pair. The problem tended to be solved significantly faster the more often this individual opened the door (number of trials with effort for the member with more effort versus latency: Kendall’s partial τ = −0.427, P = 0.053, N = 12), but the corresponding correlation for the pair member who invested less effort over all trials was not significant (Kendall’s partial τ = 0.209, P = 0.351, N = 12).
Moreover, pairs solved the problem faster the more often one individual took on the responsibility for engaging more in effort (effort of one pair member divided by effort of both members versus latency: Spearman r s = 0.58, P = 0.049, N = 12).
We then looked whether dominance had an effect on the performance of the subjects. Overall, dominant individuals did not get more food than subordinates (Wilcoxon T = 45.5, N = 12, P = 0.224, see Fig. 2). Although subordinate subjects got food in more trials in the Shareable condition than in the Non-Shareable condition (Mann–Whitney U = 0.0, n1 = 6, n2 = 6, P = 0.002), condition did not matter for the dominant individuals (Mann–Whitney U = 11.5, n1 = 6, n2 = 6, P = 0.310). Figure 3 shows that the problem was solved significantly faster the more trials the dominant subject got food (number of trials the dominant got food versus latency: Kendall’s partial τ = −0.576, P = 0.007, N = 12), but this was not true for the subordinate (number of trials the subordinate got food versus latency: Kendall’s partial τ = −0.120, P = 0.610, N = 12). In addition, subordinates invested significantly more effort than dominants (Wilcoxon T = 64.0, N = 12, P = 0.050, see Fig. 2).

Mean number of trials in which dominants and subordinates got food and invested effort in Experiment 2

Correlation of number of trials in which dominants and subordinates got food versus latency to solve the problem in Experiment 2
Finally, we looked at the correlations within individual pairs between latency to success and trial number; see Tables 4 and 5 for Spearman correlations for each pair. Interestingly, three pairs in the Shareable condition became significantly faster at solving the problem, whereas two pairs in the Non-Shareable condition became significantly slower. For the other pairs, there were no correlations. (Note that here we included trials in which the problem was not solved, in which case we scored 70 s latency.) Fisher’s omnibus test (χ 2 = 69.37, df = 24, P < 0.001) showed that the distribution of these correlations differed from the null hypothesis that all correlations were zero.
Discussion
Again, all pairs were able to solve the problem in the majority of the trials. It turned out that the problem was solved faster the more trials the dominant subject got food. This indicates that at least dominant subjects’ motivation to participate in the task may decrease when they have not been reinforced in previous trials. That is supported by the fact that two pairs in the Non-Shareable condition became slower at solving the problem over trials. In contrast, three pairs in the Shareable condition became faster at solving the problem, suggesting that the subjects learned to coordinate better over trials.
Interestingly, effort was not shared equally. In all pairs, it was usually the same partner that approached the open door so that the sliding door was moved and the partner could cross the fence. Oldfield-Box (1967) tested groups of rats that could feed themselves by pressing a lever. The lever and the tray were on different sides of the cage. So as in the current study, the animal that invested the most effort and took the initiative was less likely to get the reward. Similar to the dogs, rats did not share the effort: usually one animal pressed the lever and received less food than the others. Oldfield-Box (1967) raised the question of why one animal kept pressing the lever (i.e., approaches the open door in case of the dogs) despite receiving least food than its partners. In the current study, mainly the subordinates paid the effort. Indeed, pairs coordinated their actions better the more often subordinates invested the effort.
This finding raises several key questions: Do the subordinates understand that they invested more effort than their partners but could potentially receive less food than dominant dogs as they reached the food bowl later than them? What do dogs at all understand about the role of the other dog in this task? Do they understand that—in contrast to the rats in the studies of Oldfield-Box (1967)—they need their partner and that she/he is paying in effort when she/he is approaching the open door? Whether animals compare their own efforts and payoffs with those of others is a hotly debated topic (Bräuer and Hanus 2012; Bräuer et al. 2006, 2009; Brosnan and de Waal 2003; Brosnan et al. 2005; Dindo and de Waal 2007; Dubreuil et al. 2006; Jensen et al. 2006, 2007; Roma et al. 2006; Takimoto et al. 2010). Although there is conflicting evidence about whether animals react against inequity and are sensitive to the outcomes of others, there is no evidence that they are able to evaluate the relative effort committed by a partner (Fontenot et al. 2007; Range et al. 2009; van Wolkenten et al. 2007).
Range et al. (2009) have argued that dogs might lack the cognitive abilities to show sensitivity to the degree of effort in relation to the outcome of others. In the current study, there is again no evidence that the dogs compare their own efforts with those of their partner. Otherwise those dogs that invested the effort in opening the door in most of the trials should have stopped doing so and shared the work with the partner. One would also expect that pairs sharing the effort would solve the problem better. But the opposite was the case: pairs that did not share the effort were successful faster.
However, there is one—rather unlikely—alternative hypothesis. Subordinate dogs invested significantly more effort than dominants. Moreover, the problem was solved faster the higher the number of trials in which the dominants got the food. In a study of Bräuer et al. (2006), apes were less likely to accept low-quality food when they were dominant over a partner that was getting high-quality food than when they were subordinate. The authors have argued that subordinates may be more predisposed to accept any kind of food because they would always be displaced from a monopolizable food in competition with a dominant individual. In the same way, subordinate dogs might be similarly resigned to always contributing the effort. According to this hypothesis, dogs in the current study were able to compare their own increased effort with that of their partner, but they nevertheless accepted it. However, this explanation is not plausible as we found no behavior (such as aggressive displacement) that would indicate the dominant individuals were prepared to force the subordinate to approach the open door. Moreover, Bradshaw et al. (2009) have questioned the traditional concept of dominance in dogs as they could not detect an overall hierarchy in a group of domestic dogs.
General discussion
The current two experiments show that domestic dogs can coordinate their actions in a hunting-like paradigm. A crucial question is how dogs learned to coordinate their actions. One possibility is that dogs relied on knowledge about their partner’s role. However, it is also possible that dogs simply learned to be in the right place at the right time without fully understanding the role of the partner. Regardless of the type of knowledge underlying dogs’ responses, the result was coordinated behavior with a high success rate. It is conceivable that the group hunts of wolves and wild dogs (Coppinger and Coppinger 2001; Creel and Creel 2002; Mech 1970; Mech and Boitani 2003) may also consist of the independent actions of the individuals who have learned what it is best for them with little knowledge about their partners’ roles (Tomasello et al. 2005).
This is supported by the fact that dogs’ abilities to solve that problem do not depend on the divisibility of the reward (defined by the condition). Dogs could share within a trial only in the Shareable condition, but even in the Non-Shareable condition, they could share across trials, so that they got the food alternately. We found that dogs solve the problem faster the more food the dominant subject receives. Somewhat different results were found in other species that cooperated to pull a food platform. Pairs’ ability to solve the pulling task was correlated with the possibility of sharing, and their tendency to share food (de Waal and Davis 2003; Melis et al. 2006a, b; Seed et al. 2008). This implies that animals decide to cooperate based on their chances of obtaining a reward. In the present study, especially the dominant individual dog is trying to cross the fence to get the reward. When the dominant dog fails to obtain reward over several trials because the partner gets everything, she/he stops participating and no longer approaches the doors. Interestingly, the motivation to continue participating without receiving a reward varies widely between individuals. Whereas Aimee approached the door 46 times without getting food, other dogs stopped doing so after a few trials.
One could argue that sharing might be a consequence of coordinated behavior. In other words, dogs might be better at sharing the food when they have solved the problem together faster. Boesch and Boesch (1989) reported that chimpanzee hunters get more of the prey meat than non-hunters and that good hunters receive most meat (but see Gilby et al. 2008). However, we did not find that dogs were better at sharing the food after they coordinated themselves better. It is unclear whether they understood the role of the partner at all. First, they usually did not share the effort. Second, we did not observe any intentional communication between dogs to coordinate their actions. Like chimpanzees, dogs did not produce communicative attempts to mobilize or reengage their partner (Bullinger et al. 2011; Melis et al. 2006a, b; Warneken et al. 2006). They did not force their partner to go to the other side of the central fence so that the problem could be solved.
Moreover, we did not find behavior that indicated that the dogs attended to each other. In contrast to chimpanzees and hyenas, the dogs seemed not to monitor the partner so as to promote coordination (Drea and Carter 2009; Melis et al. 2006a, b, 2009). Dogs seemed to show less sensitivity to their partner than another social carnivore, the hyena. There are three possible hypotheses for this. First, it is possible that the problem the dogs were trying to solve was too easy, and therefore, attending to each other was simply not necessary. Indeed, all pairs solved the problem in the majority of trials. The second hypothesis is that the dogs may have lost this skill during the domestication process. Indeed, some authors have considered dogs as omnivorous scavengers rather than carnivores (Serpell 1995; Miklosi 2007). Food is either provided by humans or dogs scavenge, so they do not have to hunt together in order to survive. In that case, one could argue that it is even disadvantageous for dogs to cooperate or to share food. So it is an interesting question, whether wolves, which are carnivores and dogs’ closest relatives, would behave differently in an identical test situation. Third, dogs might attend to the partner and maybe even communicate with her when it is a human. A number of studies have shown that dogs prefer humans as social partners (Gacsi et al. 2005; Miklosi et al. 2003; Topal et al. 2005). This hypothesis is supported by the observation that dogs often approached the side of the apparatus from which the experimenter moved the sliding door and barked at her.
Further studies are needed to distinguish which of these three hypotheses is the best explanation for the dogs’ behavior. Testing dogs with human partners, testing wolves and increasing the complexity of the task may help to answer the question of what dogs understand when they coordinate their action and how this skill may have evolved. Moreover, it would be interesting to compare the performance of familiar pairs with non-familiar ones. It is conceivable that—as in studies with other species—the kind of relationship between the two members of a pair might influence the performance of that pair.
In conclusion, we were able to show that dogs coordinate their actions in a new paradigm that models a possible situation during a cooperative hunt. They were faster at solving the problem the more food the dominant subject got. Moreover, dogs did not share the effort required to solve the problem—the subordinate invested the majority of effort. In contrast to other species, dogs did not monitor each other, suggesting that this coordination problem can be solved effectively without communication and without even attending to each other.
References
Boesch C (1994) Cooperative hunting in wild chimpanzees. Anim Behav 48:653–667
Boesch C, Boesch H (1989) Hunting behavior of wild chimpanzees in the Taï National Park Ivory Coast. Am J Phys Anthropol 78:547–573
Boesch C, Boesch-Achermann H (2000) The chimpanzees of the Tai Forest. Univ Press, Oxford
Bradshaw JWS, Blackwell EJ, Casey RA (2009) Dominance in domestic dogs—useful construct or bad habit? J Vet Behav 4:135–144
Bräuer J, Hanus D (2012) Fairness in non-human primates? Soc Justice Res 25:256–276
Bräuer J, Call J, Tomasello M (2006) Are apes really inequity averse? Proc R Soc B 273:3123–3128
Bräuer J, Call J, Tomasello M (2009) Are apes inequity averse? New data on the token-exchange paradigm. Am J Primatol 71:175–181
Brosnan SF, de Waal FB (2003) Monkeys reject unequal pay. Nature 425:297–299
Brosnan SF, Schiff HC, Waal FBMd (2005) Tolerance for inequity may increase with social closeness in chimpanzees. Proc R Soc B 272:253–258
Bshary R, Grutter AS (2006) Image scoring and cooperation in a cleaner fish mutualism. Nature 441:975–978
Bullinger AF, Wyman E, Melis AP, Tomasello M (2011) Coordination of chimpanzees (Pan troglodytes) in a stag hunt game. Int J Primatol 32(6):1296–1310. doi:10.1007/s10764-011-9546-3
Coppinger R, Coppinger L (2001) Dogs: a startling new understanding of canine origin, behavior, and evolution. Scribner, New York
Creel S, Creel NM (2002) The African wild dog: behavior, ecology, and conservation. Princeton University Press, Princeton
de Waal FBM, Davis JM (2003) Capuchin cognitive ecology: cooperation based on projected returns. Neuropsychologia 41:221–228
Dindo M, de Waal FBM (2007) Partner effects on food consumption in brown capuchin monkeys. Am J Primatol 69:448–456
Drea CM, Carter AN (2009) Cooperative problem solving in a social carnivore. Anim Behav 78:967–977
Dubreuil D, Gentile MS, Visalberghi E (2006) Are capuchin monkeys (Cebus apella) inequity averse? Proc R Soc B 273:1223–1228
Fontenot MB, Watson SL, Roberts KA, Miller RW (2007) Effects of food preferences on token exchange and behavioural responses to inequality in tufted capuchin monkeys, Cebus apella. Anim Behav 74:487–496
Gacsi M, Gyori B, Miklosi A, Viranyi Z, Kubinyi E, Topal J, Csanyi V (2005) Species-specific differences and similarities in the behavior of hand-raised dog and wolf pups in social situations with humans. Dev Psychobiol 47:111–122
Gazda SK, Connor RC, Edgar RK, Cox F (2005) A division of labour with role specialization in group-hunting bottlenose dolphins (Tursiops truncatus) off Cedar Key, Florida. Proc R Soc B London 272:135–140
Geissmann T, Orgeldinger M (2000) The relationship between duet songs and pair bonds in siamangs, Hylobates syndactylus. Anim Behav 60:805–809
Gilby IC, Eberly LE, Wrangham RW (2008) Economic profitability of social predation among wild chimpanzees: individual variation promotes cooperation. Anim Behav 75:351–360
Haccou P, Meelis E (1994) Statistical analyses of behavioural data. University Press, Oxford
Hare BA, Melis AP, Woods V, Hastings S, Wrangham RW (2007) Tolerance allows bonobos to outperform chimpanzees on a cooperative task. Curr Biol 17:619–623
Heinsohn R, Packer C (1995) Complex cooperative strategies in group-territorial African lions. Science 269:1260–1262
Hirata S, Fuwa K (2007) Chimpanzees (Pan troglodytes) learn to act with other individuals in a cooperative task. Primates 48:13–21
Jensen K, Hare B, Call J, Tomasello M (2006) What’s in it for me? Self-regard precludes altruism and spite in chimpanzees. Proc R Soc B 273:1013–1021
Jensen K, Call J, Tomasello M (2007) Chimpanzees are rational maximizers in an ultimatum game. Science 318:107–109
Magrath RD, Pitcher BJ, Dalziell AH (2007) How to be fed but not eaten: nestling responses to parental food calls and the sound of a predator’s footsteps. Anim Behav 74:1117–1129
Mech L (1970) The Wolf: the ecology and behavior of an endangered species. University of Minnesota Press, Minneapolis
Mech LD, Boitani L (2003) Wolves: behavior, ecology, and conservation. University of Chicago Press, Chicago
Melis AP, Semmann D (2010) How is human cooperation different? Philos T R Soc B 365:2663–2674
Melis AP, Hare B, Tomasello M (2006a) Chimpanzees recruit the best collaborators. Science 311:1297–1300
Melis AP, Hare B, Tomasello M (2006b) Engineering cooperation in chimpanzees: tolerance constraints on cooperation. Anim Behav 72:275–286
Melis AP, Hare B, Tomasello M (2009) Chimpanzees coordinate in a negotiation game. Evol Hum Behav 30:381–392
Mersmann D, Tomasello M, Call J, Kaminski J, Taborsky M (2011) Simple mechanisms can explain social learning in domestic dogs (Canis familiaris). Ethology 117(8):675–690
Miklosi A (2007) Dog behaviour, evolution, and cognition. Oxford University Press, Oxford
Miklosi A, Kubinyi E, Gacsi M, Viranyi Z, Csanyi V (2003) A simple reason for a big difference: wolves do not look back at humans but dogs do. Curr Biol 13:763–766
Mills MGL (1990) Kalahari Hyaenas: comparative behavioral ecology of the two species. Unwin Hyman, London
Mitani JCC (2006) Demographic influences on the behavior of chimpanzees. Primates 47:6–13
Naderi S, Miklósi Á, Doka A, Csányi V (2001) Co-operative interactions between blind persons and their dogs. Appl Anim Behav Sci 74:59–80
Oldfield-Box H (1967) Social organization of rats in a “social problem” situation. Nature 213:533–534
Pongracz P, Miklosi A, Kubinyi E, Topal J, Csanyi V (2003) Interaction between individual experience and social learning in dogs. Anim Behav 65(3):595–603
Range F, Horn L, Viranyi Z, Huber L (2009) The absence of reward induces inequity aversion in dogs. Proc Natl Acad Sci USA 106:340–345
Roma PG, Silberberg A, Ruggiero AM, Suomi SJ (2006) Capuchin monkeys, inequity aversion, and the frustration effect. J Comp Psychol 120:67–73
Ruusila V, Pesonen M (2004) Interspecific cooperation in human (Homo sapiens) hunting: the benefits of a barking dog (Canis familiaris). Ann Zool Fennici 41:545–549
Seed AM, Clayton NS, Emery NJ (2008) Cooperative problem solving in rooks (Corvus frugilegus). Proc R Soc B 275:1421–1429
Serpell JE (1995) The domestic dog: its evolution, behaviour and interactions with people. Cambridge University Press, Cambridge
Stander PE (1992) Cooperative hunting in lions: the role of the individual. Behav Ecol Sociobiol 29:445–454
Takimoto A, Kuroshima H, Fujita K (2010) Capuchin monkeys (Cebus apella) are sensitive to others’ reward: an experimental analysis of food-choice for conspecifics. Anim Cogn 13:249–261
Tomasello M, Call J (1997) Primate cognition. Oxford University Press, New York
Tomasello M, Carpenter M, Call J, Behne T, Moll H (2005) Understanding and sharing intentions: the origins of cultural cognition. Behav Brain Sci 28:675–735
Topal J, Gacsi M, Miklosi A, Viranyi Z, Kubinyi E, Csanyi V (2005) Attachment to humans: a comparative study on hand-reared wolves and differently socialized dog puppies. Anim Behav 70:1367–1375
van Wolkenten M, Brosnan SF, de Waal FBM (2007) Inequity responses of monkeys modified by effort. Proc Natl Acad Sci USA 104:18854–18859
Warneken F, Tomasello M (2006) Altruistic helping in human infants and young chimpanzees. Science 311:1301–1303
Warneken F, Chen F, Tomasello M (2006) Cooperative activities in young children and chimpanzees. Child Dev 77:640–663
Acknowledgments
We thank the dogs’ owners for agreeing to participate in this study. We also want to thank Katrin Schumann for her help with the data collection and Julia Steinbrück und Jacqueline Rose for data scoring for inter-observer reliability purposes. We thank Roger Mundry for statistical advice.
Conflict of interest
We declare that the experiments comply with the current laws of Germany. We also declare that we have no conflict of interest.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Bräuer, J., Bös, M., Call, J. et al. Domestic dogs (Canis familiaris) coordinate their actions in a problem-solving task. Anim Cogn 16, 273–285 (2013). https://doi.org/10.1007/s10071-012-0571-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10071-012-0571-1