
Abstract
To overcome the problems existing in the application of the traditional stability control method of the surrounding rock of deep shafts, in this paper, a stability control method for the surrounding rock of deep shafts is presented based on the New Austrian Tunnelling Method (NATM) and the Norwegian Method of Tunnelling (NMT), and a support design method of deep shafts is also proposed. In addition, taking a deep shaft construction project as an example, the support design process of a deep shaft is presented: the engineering geology and in situ stress of the deep shaft are collected and processed to evaluate the rock mass quality with the Q-system, rock mass rating (RMR), and geological strength index (GSI). The strength and deformation parameters of the intact rock are obtained via laboratory tests, and the rock mass mechanical parameters are calculated using the generalized Hoek–Brown method. Then, a variety of support design methods based on rock mass classification systems are applied to determine the primary and permanent support, and the support time is obtained on the basis of a convergence-confinement analysis and engineering experience. A two-dimensional plane-strain model is constructed to analyze and evaluate the safety of the proposed support system, incorporating the major geological discontinuities and non-hydrostatic in situ stress state prior to excavation.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
A deep shaft project (denoted XZJ) is being carried out to provide a central ore-lifting facility for various mining areas at the Xincheng gold mine, located in northeastern Laizhou, Yantai, Shandong Province, China (Fig. 1). The shaft is required to have a circular cross section with a finished diameter of 6.7 m and a depth of 1527 m, making it the deepest shaft in China.

Location map and construction site of the XZJ shaft, Shandong Province, eastern China
The stability control method of the surrounding rock of deep shafts is an important part of the construction of deep shafts and has been developed with the surrounding rock pressure theory of underground engineering. The development of the surrounding rock pressure theory of underground engineering can be divided into three periods: the classical surrounding rock pressure theory period, the granule pressure theory period, and the elastoplastic surrounding rock pressure theory period (Zheng 2012). According to the classical theory of surrounding rock pressure, as described by Heim and Rankine, the pressure acting on a support structure is equal to the gravity of the overburden rock (Cai 2002). However, as the depth of the underground engineering increases, the pressure acting on the support structure is no longer only the gravity of the overburden rock because with increasing excavation and support time, the support structure and the surrounding rock separate, some rock masses become loose, collapsing and forming an arch, and the gravity of the loose rock in the arch is the pressure acting on the support structure. This process was the focus of the granule pressure theory period, which was supported by M.M.IIpoтoдьякoнoв and K. Terzaghi (Jia 2010). With the development of support methods and technology, people realized that the surrounding rock pressure was not only the gravity of the loose rock mass in the arch of the surrounding rock but mainly the deformation-induced pressure between the surrounding rock and support. Combined with the development of continuum mechanics and numerical analysis, the development of surrounding rock pressure theory entered the elastoplastic surrounding rock pressure theory period, and its early theoretical foundations were presented by Fenner and Kastner (Bieniawski 1989a).
In the classical surrounding rock pressure theory period and the granule pressure theory period, the surrounding rock of engineering was only used as the load to be controlled by the support, which formed the traditional philosophy of timely and high-strength support to prevent surrounding rock loosening and improve the stability control of the surrounding rock in undergrounding engineering. Under the guidance of this philosophy, as the depth of underground engineering increases, the surrounding rock pressure increases, and the strength and stiffness of the support also increase. However, for deep surrounding rock with a high pressure, technical measures to continuously enhance the support strength and rigidity have achieved poorer stability control and economic gain (Zhao 2018).
The New Austrian Tunnelling Method (NATM) is the most revolutionary and representative method presented during the elastoplastic surrounding rock pressure theory period for the stability control of surrounding rock; it was originally developed for use in the Austrian Alps, where tunnels are commonly excavated at depth and under high in situ stress conditions (Vydrová 2015). Compared with the traditional stability control methods of surrounding rock, the main innovation of NATM is that takes advantage of the self-supporting capability of the surrounding rock, which is accomplished by dual-lining supports (initial and final support) that are intended to allow the rock to deform before the application of the final lining so that the loads on the lining are reduced, provided that detrimental loosening, resulting in a substantial loss of strength, is avoided (Kendorski and Hambley 1992).
The Norwegian method of tunneling (NMT) is another important method presented during the elastoplastic surrounding rock pressure theory period for the stability control of surrounding rock. It is also based on the philosophy of exerting the self-supporting capability of surrounding rock. Unlike NATM, NMT has good applicability in hard jointed rock mass engineering, and there are great differences in the selection of support types and the determination of support parameters, while its rock mass classification system can be used to predict the mechanical performance of engineering rock masses and support requirements, which can only be achieved by on-site monitoring in NATM (Barton et al. 1992; Barton 1998). Since NATM and NMT were proposed, they have been widely used in various rock engineering projects, such as bridges, mines, and water conservancy construction. A variety of methods based on NATM and NMT applications, such as the Australian methodology, Canadian and Scandinavian methodology, and South African methodology, also have been proposed (Purwanto et al. 2014; Li 2017; Meng et al. 2015).
In China, the stability control method of the surrounding rock and construction technologies for deep shafts have not been proposed; therefore, these methods based on the traditional stability control philosophy of shaft surrounding rock are still being used to sink deep shafts. However, with these methods, the rock mass conditions for rock mass classification are not sufficient, and the variability in different rock mass qualities is small or even absent. All of these factors result in the poor applicability of the rock mass classification method and some limitations of the corresponding support design method in deep shaft construction (Li et al. 2015). The geological conditions of the deep strata are obviously different from those of shallow strata; thus, the empirical value of lining thickness based on the experience of shallow shaft construction is no longer suitable for deep shaft construction. The increasing shaft diameter also renders the design of the shaft lining beyond the application scope of the lining design method of a shallow shaft (Wang 2012). A combined construction operation process of short section excavation and lining, which requires a high-strength rigid concrete lining to be installed immediately after the opening of the shaft front, results in frequent rock bursts and cracking of the shaft lining due to the high surrounding rock pressure (Xiao 2015). In view of this, to take advantage of the self-supporting capability of the surrounding rock (as in NATM and NMT), a new stability control method and support design method of the surrounding rock for deep shafts are proposed and used to design a support system for the XZJ project, which provides a reference for other deep shaft construction.
Stability control method of the surrounding rock of a deep shaft
NATM represents both a design philosophy and a construction method (Golser 1979; Brown 1981; Hagenhofer 1990; Barton and Grimstad 1994). As a construction method, it is more suitable for soft rock tunnel construction, and as a design philosophy, it has a guiding role for most underground engineering. The main principles of NATM are summarized in Karakuş and Fowell (2004). Compared with NATM, NMT is a set of technical systems based on the Q-system of rock mass classification for the stability control of the surrounding rock of underground engineering. Similarly, NMT can be applied to most rock engineering, and its essential characteristics are summarized in Singh and Goel (2011a).
The self-stability of shaft surrounding rock is not considered in traditional theory or methods (Terzaghi 1943; Talobre 1957; Ozturk and Guler 2016; McCreath1980). Only a few researchers have shown the application of the self-stability of surrounding rock in support design and stability analysis of deep shafts, but there is no introduction or explanation of the stability control method of the surrounding rock of deep shafts (Fabich et al. 2015; Hormazabal et al. 2012). Both NATM and NMT emphasize making full use of the self-supporting capability of the surrounding rock. With the opening of the shaft front, the primary support is applied immediately to stabilize the exposed surfaces and allow the rock to deform and release internal stresses, which avoids the problem of a high surrounding rock pressure in the application of the traditional stability control method of surrounding rock in deep shaft construction, greatly reduces the occurrence frequency of rock bursts, prevents the shaft lining from cracking, and reduces the support strength requirement and support cost. Based on NATM and NMT, this paper proposes a stability control method for the surrounding rock of a deep shaft. The details are as follows:
-
(i)
Mobilization of the strength of the rock mass—This method relies on the self-supporting capability of the rock mass being conserved as the main component of shaft support.
-
(ii)
Primary and permanent support—The primary and permanent support are used to allow the rock to deform before the application of the final lining so that the loads on the lining are reduced.
-
(iii)
Primary support—The primary support is used to enable the rock to support itself. The loosening and excessive rock mass deformation is minimized by applying a 25–50-mm layer of sealing shotcrete immediately after opening of the shaft front, and then a flexible but active combination of systematic rock bolts, additional shotcrete, and steel ribs are installed within the stand-up time to allow the rock to deform and release internal stresses.
-
(iv)
Permanent support—The final lining is installed as soon as possible to further strengthen the surrounding rock and form a safety reserve. Theoretical analysis and engineering experience are used to determine the time to install it.
-
(v)
Rock mass classification—The participation of geologists is very important as the primary support, and the further design of supports during the excavation of rock requires the classification of the rock mass.
-
(vi)
Dynamic design—The design is dynamic during shaft construction. Classification of the rock mass at every shaft front opening is performed, and the supports are selected accordingly.
Deep shaft support design method
The design methods can be divided into three main groups, namely, empirical, analytical, and numerical methods. According to the stability control method of the surrounding rock of a deep shaft, support design methods based on rock mass classification—a kind of empirical method—are recommended; they are flexible, convenient, and applicable. However, the NATM classification and its support design method are based on the engineering performance of the surrounding rock (John 1980). This approach evaluates the rock mass quality and suggests support measures in the process of the excavation of rock, which reflects NATM’s dynamic design philosophy and cannot be used in preliminary support design for deep shafts. The Q-system of rock mass classification and its support design method adopted by NMT can predict the rock mass quality and support requirements, which is one of the essential characteristics of NMT, and can be used in shaft preliminary support design. Many similar rock mass classification methods and their support design methods, such as RMR and RQD, are also recommended to avoid errors due to the characteristic limitations in the application of a single method. The estimation method of lining pressure based on RMR is recommended. Combined with engineering experience, reasonable support parameters of shaft linings can be determined with this approach. The convergence-confinement method is an important analysis method of NATM. According to the convergence-confinement analysis of the shaft surrounding rock and support, we can determine the appropriate time to cast the concrete lining, which can result in a stable and economic lining design. The numerical simulation method can fully consider various factors affecting the stability of the surrounding rock and support system and simulate and predict the actual performance of the shaft surrounding rock and support system to evaluate the safety and support effect of the proposed support system. Figure 2 shows the process of shaft support design.

Flow chart for ground support and shaft lining design
Geological conditions
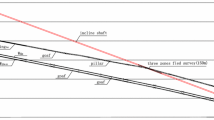
For the efficient design of reliable supports for deep shafts, a thorough geological exploration of the site is necessary, including rock mass identification. Figure 3 shows a 156–336 cross section of the study site containing the axis of the XZJ shaft, two geotechnical boreholes, and the geotechnical units, as interpreted from available geotechnical information at depths of approximately −930 to −1494.3 m.

Vertical profile with an orientation from 156 ~ 336° containing the axis of the XZJ shaft, ZCK-1; the geological units were interpreted from the available geotechnical data
The shaft top was located at +32.7 m; the shaft was initially designed to reach a depth of −1295 m. ZCK-1 and ZCK-2 represent boreholes; borehole ZCK-1 was located at the center of the XZJ shaft and drilled from the surface to a depth of −1331.7 m. Its azimuth is 336° ± 10°, its dip angle is 89.85° ± 0.5°, and the total slant distance is 3.39 m. After ZCK-1 was finished, the XZJ shaft was deepened to −1494.3 m. The sinking of the XZJ shaft was performed without detailed geotechnical information from −1331.7 m to −1494.3 m. To provide this geotechnical information, another borehole, ZCK-2 with a distance of 20 m from ZCK-1, was drilled from −930 m to −1570 m. ZCK-2 has an azimuth of 70° ± 15° and dip angle is 89.92° ± 0.4°, and the total slant distance is 2.7 m. The data between −930 m and −1494.3 m were considered in this study because they provide sufficient geological and geotechnical information. Based on these evaluation indexes of the Q-system and RMR, the geological and geotechnical data obtained from the cores of ZCK-1 and ZCK-2 were analyzed, and the results are summarized as follows.
(1) The main geotechnical unit is a granodiorite unit. Based on the integrity of the rock core, this unit is subdivided into original granodiorite, semiclastic granodiorite, and cataclastic granodiorite. (2) Two or three sets of critical joints with an average joint spacing of 0.1 ~ 0.8 m are observed, and a number of randomly distributed joints are also found in the rock cores. (3) The main type of joint surface is planar, with a few undulating or discontinuous joints. (4) The critical joint sets are smooth or slightly rough, and the separation between the joint walls is 1 ~ 5 mm. Small parts of the joint walls are slightly altered by groundwater, and no fracture-filling material is found in the core samples. (5) Although there are signs of a large water inflow or of high-pressure groundwater, their distribution was limited and concentrated at certain depths; therefore, the rock core can generally be regarded as dry.
From a structural geology point of view, 4 sets of faults (Fig. 3 and Table 1) are expected to be encountered during the construction of the XZJ shaft. The faults will affect the stability of the shaft surrounding rock and the support system considered in this paper.
In situ or pre-excavation stresses are of primary importance while undertaking any major underground excavation stability problem (Sheorey 1994). There is no stress disturbance from other mining excavations adjacent to the XZJ shaft at the study site; only the in situ stress is considered in this paper. The related in situ stresses are calculated from Cai et al. (2000), Li et al. (2012), and Zhao et al. (2007); the stress directions are the same as the directions suggested by Cai et al. (2000); and the mean value of the calculated stresses at a depth is selected as the in situ stress of XZJ at this depth. The corresponding results are presented as follow:
where \({\sigma }_{H}\) is the major horizontal principal stress, trending approximately 90–270°; \({\sigma }_{h}\) is the minor horizontal principal stress, trending approximately 0–180; \({\sigma }_{v}\) is the vertical stress; and \(\mathrm{H}\) is the depth (in m).
Geomechanic classification and properties of a rock mass
Rock mass classification systems are important for estimating rock mass behavior and developing countermeasures to ensure safe and economic mining operations (Aksoy 2008). According to the support design method of deep shafts, the RQD (Deere et al. 1967), RMR (Bieniawski 1989b), and Q-system (Grimstad and Barton 1993) are used in this paper. If the 1989 version of Bieniawski’s RMR system is used, then the geological strength index (GSI) is determined by the equation GSI = RMR1989 −5, where RMR1989 has a groundwater rating of 15 and the adjustment for the joint orientation is set to zero (Hoek and Brown 1997). The rating results of the rock mass quality for the rock surrounding the XZJ shaft are listed in Table 2.
Determining the strength of a rock mass is difficult since the representative specimens are too large for laboratory testing. This difficulty can be overcome by using the generalized Hoek–Brown method (Hoek et al. 2002). The following intact rock parameters are obtained using unconfined tests (5 sets and 15 samples), triaxial tests (11 sets and 33 samples), and Brazil split tests (5 sets and 15 samples) of rock cores at different depths (Table 3): the Hoek–Brown intact rock parameter (mi), the unconfined compressive strength (σci), the tensile strength (σti), the deformation modulus (Ei), Poisson’s ratio (μ), and the bulk density (γ).
The drilling and blasting method is preselected as the shaft sinking method, which resulted in severe blast-induced damage to the surrounding rock of the XZJ shaft in the shallow section (Fig. 4). Due to the differences in rock strength and integrity at different depths, the damage of the surrounding rocks of the deep shaft section may be more or less than the damage of the shallow shaft section. However, the shallow shaft surrounding rock is severely damaged, and the deep shaft surrounding rock may be conservatively predicted as severely damaged. The disturbance factor D is associated with blast-induced damage in the surrounding rocks and thus assigned a conservative value of 0.8 for the deep section of the XZJ shaft, according to the method proposed by Marinos and Hoek (2000).

The damage of surrounding rock at shallow section of XZJ shaft
And the rock mass parameters, such as the Hoek–Brown rock mass parameters (mb, s, and α), the deformation modulus (Erm), the tensile strength (σt), the cohesion (c), and the friction angle (Φ), are calculated and listed in Table 4.
Temporary support for the XZJ shaft
According to the stability control method of the surrounding rock for deep shafts, temporary support is directed to enable the rock to support itself, which means allowing the shaft surrounding rock to deform before loosening and excessive rock mass deformation occurs. In view of this, temporary support components are required to have sufficient support and deformation capacities, where the support components can deform as the rock deforms while still providing sufficient support to ensure the stability of the shaft surrounding rock during shaft sinking. These support components may include rock bolts, steel wire mesh, steel ribs, or shotcrete. Certainly, a 25–50-mm layer of sealing shotcrete should be applied immediately after the opening of a shaft front. However, the use of additional shotcrete that may result in the transition from flexible temporary support to rigid support is not recommended in this paper.
The important parameters to be determined for the temporary support are those of the rock bolts. Here, resin bolts are used, and the main bolt parameters are the length and spacing. Support design methods based on the rock mass quality in the Q-system, RMR, and RQD were used to determine these bolt parameters for shaft temporary support (Grimstad and Barton 1993; Merritt 1972; Deere and Deere 1988; Bieniawski 1984). Table 5 summarizes the results of the temporary support design, where L is the length of the rock bolts and determines the maximum value of the empirical design, while the bolt spacing determines the minimum value of the empirical design. Adjacent regions with similar support parameters and short distances can be combined into one region, and the most conservative values of their support parameters can be selected as the support parameters of the combined region because it is unreasonable to change the support parameters for sinking shafts over short distances.
Permanent support for the XZJ shaft
Concrete lining is a common type of permanent support for mine shafts and has many advantages compared to other types of support. The concrete lining provides an anchor for utility hangers and shaft steel, and the regular dimensions of the shaft allow the standardization of the shaft steel and hardware. The smooth surface of the concrete lining, compared to rough shafts of the same diameter, greatly reduces ventilation loss. This type of support is also useful for assisting in the control and collection of groundwater in wet shafts, resulting in dry walls. According to the stability control method of the surrounding rock of a deep shaft, the concrete lining is required to only achieve the safety reserve, and it does not need to be very thick, especially when unavoidable overbreak occurs.
To design a shaft concrete lining, the lining pressure should be determined. Traditional methods of estimating the lining pressure without taking the self-supporting capacity of shaft surrounding rock into account assume a rigid lining. A trial lining thickness is selected, and the resulting lining safety factor is calculated. This process is repeated until the desired safety factor is obtained. Using a traditional design method, a high lining pressure is obtained; for a deep shaft, this results in a very thick concrete lining (McCreath 1980).
According to the stability control method of the surrounding rock of a deep shaft, the lining pressure and thickness are different when the casting concrete time is different, but surrounding rock-lining equilibrium with a designated safety reserve can always be achieved. There are no quantitative criteria for shaft lining design, but some recommended values of lining thickness obtained from engineering experience are used. In South Africa, unreinforced concrete linings 0.23 ~ 0.30 m thick are generally accepted as sufficiently strong for virtually all rock formations (Holl and Fairon 1973). A permanent concrete liner of at least 0.5 m was also established based on a practice used in civil engineering tunnel projects (Hormazabal et al. 2012). However, the specific value of lining thickness cannot be obtained due to its wide range of empirical values. Taking the control of the loosed shaft surrounding rock as the calculation principle of lining pressure, a calculation method based on RMR1989 is used to calculate the lining pressure, and then the lining thickness is calculated (Oztork 2000). The calculated lining thickness results can be used as a reference, and a reasonable lining thickness is selected in combination with the recommended empirical lining thickness value in this paper.
Equation (4) is used to determine the concrete lining pressure:
Here, \(\mathrm{h}\mathrm{t}\) is the rock-load height (m) determined from Eq. (5), \({\gamma }\) is the unit weight of the rock material (0.027 MN/m3), and \(\mathrm{T}\mathrm{S}\) is the support constant, which changes between 1 and 2.25.
where \(\mathrm{B}\) is the shaft diameter and \(\mathrm{S}\) is the stress factor. Equation (6) is used for calculating \(\mathrm{S}\). If the RMR1989 value is less than 40, which is usually the case for weakly stratified and clay-bearing rock, then Unal’s mRMR index value (Unal 1996) should be used.
where \(k\) is the ratio of the major to minor horizontal principal stresses; \({\sigma }_{ci}\) is the uniaxial compressive strength of the intact rock (MPa); \({P}_{v}\) is the vertical in situ stress (MPa); and A, B, C, and D are the constants presented in Table 6.
The thickness of the concrete lining can be represented by Eq. (7) or Eq. (8) (Unrug 1992):
where \({f}_{c}\) is the uniaxial compressive strength of the concrete (25 MPa), \(P\) is the external pressure (MPa), \(\mathrm{r}\) is the inner radius of the circular shaft (m), \(\mathrm{t}\) is the thickness of the concrete lining (m), and \(FS\) is the safety factor with respect to failure (in compression) of the concrete lining. In this study, a safety factor of 2.5 for the concrete lining (for static loading and dry shaft wall rock) is judged as appropriate (Obert et al. 1959; Pariseau 2017).
If the surrounding rock pressure is suddenly applied to the concrete lining, then the concrete lining will exhibit elastic behavior, and the “thick wall” formula (Eq. 7) should be selected. If a high shaft wall rock pressure is slowly applied to the concrete lining, then the concrete lining will exhibit plastic behavior, and the Huber formula (Eq. 8) should be used (Vergne 2003). In this section, we assume the elastic concrete lining behavior and use the thick wall formula to calculate the thickness of the concrete lining. The thick wall formula is more conservative than the Huber formula, and designers often find the notion of the plastic behavior of concrete linings to be unintuitive.
The lining pressure depends on the strength of the rock mass, the shaft radius, and the in situ stress, so the calculation results in Table 7 vary from 0.57 to 0.77. The corresponding calculation results of lining thickness for the XZJ shaft are 0.2 ~ 0.3 m. A concrete lining thickness of 0.3 m was determined to be suitable throughout the whole study section of the XZJ shaft combined with the recommended empirical values of lining thickness.
Support time
The primary support allows limited deformation but prevents loosening of the rock mass. In the initial stage, very small forces are required to prevent the rock mass from shifting inward, but once movement starts, large forces are required (Singh and Goel 2011b). Therefore, primary support should be installed within the stand-up time to prevent movement. The stand-up time depends upon the unsupported span of the shaft, which is defined as the distance between the shaft front and the last support. The stability evaluation chart (Bieniawski 1984) shows the relationship between the stand-up time and unsupported span for various rock mass RMR classes and is used to give the unsupported span and its corresponding stand-up time for the surrounding rock of the XZJ shaft with different RMR values. The results are summarized in Table 8. It is reasonable for that shaft to be excavated with an unsupported span of 4 m when considering the stability of the shaft wall rock and the shaft construction technology, in which the 4-m unsupported span is coincident with the excavation advance in each blasting cycle, and its corresponding stand-up time (at least 10,000 h) is enough for the installation of the primary support.
The convergence-confinement method was used to determine the appropriate support time based on the support requirements or calculate the safety factor of the support system according to the designated support time (Duncan-Fama 1993; Panet 1993, 1995; Carranza-Torres and Fairhurst 2000). The three basic components of the convergence-confinement method are the longitudinal deformation profile (LDP), the ground reaction curve (GRC), and the support characteristic curve (SCC). The GRC is the theoretical basis of NATM and describes the relationship between the stresses and deformations around the openings (Bieniawski 1989c). Three constitutive models based on the postfailure behavior of a rock mass, namely, the elastic-perfectly plastic model (GSI < 25), the strain-softening model (25 < GSI < 75), and the elastic-brittle model (GSI > 75), are used to calculate GRC (Hoek and Brown 1997; Alejano et al. 2009). Different constitutive models are used, and the theoretical methods for establishing GRC are also different (Salencon 1969; Wang 1996; Brown et al. 1983; Duncan-Fama 1993; Gumusoglu et al. 1987). The GSI values of the surrounding rock of the XZJ shaft are between 25 and 75, and the strain-softening model should be used to establish the GRC. However, there are no widely accepted parameters for the strain-softening model (Youn-Kyou and Pietruszczak 2008), and the corresponding theoretical methods for establishing GRC are more complex than the other two models. Therefore, the elastic-perfectly plastic model is used in this paper.
The implementation of the convergence-confinement method is described by Carranza-Torres and Fairhurst (2000), which is used as reference for the analysis of the XZJ shaft. A “butterfly-shaped” or “non-butterfly-shaped” failure zone usually develops around a circular opening. For the case of a non-butterfly-shaped failure zone, Carranza-Torres and Fairhurst (2000) suggested that the non-hydrostatic stress field could be transformed into hydrostatic stress field to define a GRC. That is, the XZJ shaft is assumed to pass through the rock mass that is initially subjected to a hydrostatic stress field of a magnitude equal to the mean value of the horizontal principal stresses, as calculated through Eqs. (1) and (2). The theoretical method described in Carranza-Torres and Fairhurst (2000) is used to establish a GRC. For another case, the finite element software, Phase2, a two-dimensional numerical program is used to calculate the GRC in this paper. Detailed process of numerical simulation is systematically described in Rocscience Inc. (2013). In situ stresses calculated through Eqs. (1), (2), and (3) are directly applied to the numerical model. Additionally, the rock bolt with a diameter of 22 mm is made of HRB500 steel with a tensile strength of 500 MPa, and the safety factor is set to 1.2 (Obert et al. 1959; Pariseau 2017). Seven shaft cross sections corresponding to depths of − 980 m, − 1060 m, − 1080 m, − 1250 m, − 1310 m, − 1450 m, and − 1500 m are analyzed. These sections are selected to cover the advance of the shaft through the geotechnical units listed in Table 2.
A portion of the maximum radial displacement at a point on the shaft excavation boundary occurs before the shaft front advances past the specific point. The excavation boundary continues to shift inward until it reaches its maximum as the shaft front advances beyond the point. To determine the appropriate displacement before the concrete lining is installed, the LDP, which represents the relationships between the shaft wall displacement and the distance from the shaft front, is established for each of the 7 shaft cross sections (Fig. 5). The shaft cross section at a depth of − 980 m is used to illustrate the analysis procedure of the convergence-confinement method in Fig. 6. The convergence of the wall before installing bolts and casting concrete are obtained and listed in Table 9 with respect to a given safety factor (e.g., \({P}_{i}/{P}_{s}^{\mathrm{m}\mathrm{a}\mathrm{x}}=2.5\) for the concrete lining in Fig. 6).

Longitudinal displacement profiles obtained from Phase2 axisymmetric models for the 7 shaft cross sections

Application of the convergence-confinement method for the XZJ shaft at a 980-m depth
The advance of the concrete lining normally lags behind the advancing shaft front to allow for the relaxation of the surrounding rock. Failure to choose an appropriate lag distance is likely to result in the failure of the support. In shaft engineering, a distance of 2 ~ 3 times the diameter of the shaft is widely accepted and applied (Vergne 2003). Table 9 shows that a distance of less than 8 m is required to relax the shaft surrounding rock for all the shaft cross sections analyzed above; however, the time it takes to sink 8 m is not sufficient for the ground reaction or the relaxation of the shaft surrounding rock, and 16 m (approximately 2 times the shaft diameter and 4 times the excavation advance in each blasting cycle) without the concrete lining was determined according to the recommended values mentioned above. Figure 6 also shows that the greater the deformation capacity of the rock bolts is, the earlier the rock bolts should be installed to attain the same safety factor, which contributes to the stability of the shaft surrounding rock and the safety of the sinkers. Therefore, bolts with a high deformation capacity are recommended.
Stability analysis of the proposed shaft support
The shaft support design proposed above is based on the assumption of stress isotropy and rock mass continuity. However, physical discontinuities (such as faults, joints, and bedding planes) are present in rock masses, and joints usually account for a large number of discontinuities. In underground excavation design, joints are generally considered in the calculation of the rock mass strength, while the effect of discontinuities (such as faults and bedding planes) on stress also should be evaluated. The FE analysis using Phase2 is carried out to evaluate the influence of these conditions on the performance of the support system.
Figure 7 shows the numerical model with two faults. The element type of the model is 3-node triangles, and the number of elements is 6715. The displacement in the x, y, and z directions at the model boundary are restricted. The major horizontal principal stress (\({\sigma }_{H}\)) and the minor horizontal principal stress (\({\sigma }_{\mathrm{h}}\)) are applied in the x and y directions of the model, respectively, and the intermediate principal stress (\({\sigma }_{\mathrm{v}}\)) is applied in the z direction. The values of principal stress are calculated through Eqs. (1), (2), and (3). Details of the discontinuities used in this section are shown in Table 1 and Fig. 3. The Mohr–Coulomb criterion is selected as the slip criterion. It is too difficult to obtain the fault properties (tensile strength, cohesion, friction angle, and stiffness), and the weakest fault, for which all property values are assigned to 0, is used to conservatively evaluate the shaft stability. The displacement before the concrete lining is installed is summarized in Table 9; the numerical simulation procedure of the stress relaxation can be found in the Phase2 Tutorials (Rocscience Inc. 2013).

Two-dimensional plane-strain model with two faults
Figure 8 shows the two-dimensional plane-strain model of the shaft section at − 1266-m depth. The support elements, major discontinuities, and plastic zones are visible in the model. The different colors in Fig. 8 show the failure degree of the shaft wall rock after excavation and the installation of all the support elements. To gain good support from the bolts, they should be long enough to pass through the plastic zone that develops around the shaft and should be anchored in the elastic zone, as demonstrated in Fig. 8.

Two-dimensional plane-strain model showing shaft section at depth of − 1266 m. The numbered lines represent the supporting bolts, and the red lines are rock discontinuities
The loads imposed on all the supporting components should be analyzed under the action of the major discontinuities for all the geotechnical units. The axial force distributions in end-anchored bolts #1, #6, #11, and #15 are 0.155 MN, 0.161 MN, 0.157 MN, and 0.163 MN, respectively. The tensile capacity of a rock bolt is 0.196 MN, and its residual capacity is zero. The actual axial force of an installed bolt is less than the bolt strength, and the smallest safety factor observed is more than 1.2. For a given factor of safety, the supporting capacity envelopes of the concrete lining are plotted in axial force versus shear force space or moment space. The values of the axial force, shear force, and moment in the concrete lining are computed and plotted in the same space to verify that the safety factor was below the design limits. Figure 9 shows the supporting capacity diagrams of the 0.3-m-thick concrete lining. All the computed values fall inside the factor-of-safety design limit envelope, thus meeting the safety requirements of the concrete lining.

Supporting capacity diagrams of a 0.3-m-thick concrete liner a with and b without the effect of major discontinuities
Discussion
Considering the problems that arise in the construction of deep shafts in China, a stability control method and support design method of the surrounding rock of deep shafts are proposed based on NATM and NMT, and then the process of support design of the XZJ shaft is illustrated. However, the calculation of the lining pressure is approximate because of the lack of parameter values (e.g., A, B, C, and D corresponding to RMR = 65 and 70 in Table 7); these parameters were acquired in the analysis of a 300 ~ 500-m shaft and also need to be updated or revised when applied to a deeper shaft.
The support system recommended for the XZJ shaft is a preliminary design and should be calibrated by field monitoring or observation when sinking the shaft. Additionally, the support design is proposed without considering the effects of groundwater and the dynamic loading induced by blasting, which can be considered after collecting sufficient information in the final design phase.
Conclusions
Taking the XZJ project as an example, the stability control method of the surrounding rock of a deep shaft and its preliminary support design method are explored:
-
1.
Based on NATM and NMT, the stability control method of the surrounding rock of a deep shaft is proposed: a layer of sealing shotcrete should be added immediately after opening of the shaft front, and then a flexible but active combination of systematic rock bolts, additional shotcrete, and steel ribs should be installed within the stand-up time to allow the rock to deform and release internal stresses. The final lining should be installed as soon as possible to further strengthen the surrounding rock and form a safety reserve. Rock mass classification is necessary for the primary support design and the dynamic support design work that is performed at every shaft front opening during the shaft sinking.
-
2.
According to the stability control method of the surrounding rock of a deep shaft, a preliminary support design method of the surrounding rock of a deep shaft based on rock mass classification is proposed. Many rock mass classification methods and their support design methods are recommended to design the primary support of a deep shaft; it is popular to design the concrete lining using an empirical method, but the results of theoretical methods can also be referenced. A convergence-confinement analysis should be carried out to determine the appropriate time for support installation, and then the numerical simulation method can be used to simulate and evaluate the actual performance of the shaft surrounding rock and support system.
-
3.
The support design method of the surrounding rock of a deep shaft is used to design a support system for XZJ: (1) the excavation advance in each blasting cycle is 4 m; (2) 25 ~ 50-mm concrete is sprayed immediately after opening the shaft front, and then resin bolts with the spacing of 1.0 ~ 1.3 m and a length of 3 m, steel wire mesh, and steel ribs are installed; and (3) the thickness of the C25 concrete lining used is 300 mm, and a 16-m distance without permanent support is used between the shaft lining and the shaft front to relax the shaft surrounding rock.
-
4.
The safety of the proposed support system under the influence of non-hydrostatic pressure and faults is evaluated with a two-dimensional plane strain model in Phase2 software. Safety factors of 1.2 and 2.5 are obtained for the bolt and concrete lining, respectively, which fully illustrates that the deep shaft support design method mainly based on rock mass classification is accurate and reliable.
References
Aksoy CO (2008) Review of rock mass rating classification: historical developments, applications, and restrictions. J Min Sci 44(1):51–63. https://doi.org/10.1007/s10913-008-0005-2
Alejano LR, Rodriguez-Dono A, Alonso E, Fdez-Manin G (2009) Ground reaction curves for tunnels excavated in different quality rock masses showing several types of post-failure behaviour. Tunn Undergr Sp Tech 24(6):689–705. https://doi.org/10.1016/j.tust.2009.07.004
Barton N, Grimstad E, Aas G et al (1992) Norwegian method of tunnelling. World Tunn 5(6)
Barton N, Grimstad E (1994) Rock mass conditions dictate the choice between NMT and NATM. Tunnels & Tunnelling 26(10):39–42
Barton N (1998) NMT support concepts for tunnels in weak rocks. In: Tunnels and Metropolises: Proceedings of the World Tunnel Congress. 25–30 April, 1998, Sao Paulo, Brazil, 273–279
Brown ET (1981) Putting the NATM into perspective. Tunn Tunn Int 13(10):13–17
Bieniawski ZT (1984) Rock mechanics design in mining and tunnelling. United States
Brown ET, Bray JW, Ladanyi B, Hoek E (1983) Ground response curves for rock tunnels. J Geotech Eng-Asce 109(1):15–39. https://doi.org/10.1061/(ASCE)0733-9410(1983)109:1(15)
Bieniawski ZT (1989a) Engineering rock mass classifications: a complete manual for engineers and geologists in mining, civil, and petroleum engineering. John Wiley & Sons, London, pp 91–93
Bieniawski ZT (1989b) Engineering rock mass classifications: a complete manual for engineers and geologists in mining, civil, and petroleum engineering. John Wiley & Sons, London, pp 51–60
Bieniawski ZT (1989c) Engineering rock mass classifications: a complete manual for engineers and geologists in mining, civil, and petroleum engineering. John Wiley & Sons, London, pp 94–95
Cai MF, Qiao L, Li CH (2000) Measuring results and regularity of in situ stress in Xincheng gold mine. Nonferrous Met 52(3):1–6. (in Chinese) https://doi.org/10.1520/STP48458S10.3969/j.issn.2095-1744.2000.03.001
Cai MF (2002) Rock mechanics and engineering. Science Press, Beijing (in Chinese)
Carranza-Torres C, Fairhurst C (2000) Application of the convergence-confinement method of tunnel design to rock masses that satisfy the Hoek-Brown failure criterion. Tunn Undergr Space Technol 15(2):187–213. https://doi.org/10.1016/S0886-7798(00)00046-8
Deere DU, Hendron AJ, Patton FD, Cording EJ (1967) Design of surface and near-surface construction in rock. In: Proceedings of the 8th US symposium on rock mechanics (USRMS), Minneapolis, Minnesota, 237–302
Deere DU, Deere DW (1988) The rock quality designation (RQD) index in practice. In: Proceeding of Symposium on Rock Classification for Engineering Purposes. 1987, Ohio, USA, 91–101. https://doi.org/10.1520/STP48458S
Duncan-Fama ME (1993) Numerical modeling of yield zones in weak rock. In: Analysis and design methods, Pergamon Press, London, pp: 49–75. https://doi.org/10.1016/B978-0-08-040615-2.50009-5
Fabich S, Bauer J, Rajczakowska M, Świtoń SP (2015) Design of the shaft lining and shaft stations for deep polymetallic ore deposits. Min Sci 22:127–146. https://doi.org/10.5277/msc152213
Gumusoglu MC, Bray JW, Watson JO (1987) Analysis of underground excavations incorporating the strain softening of rock masses. In: Proceedings of the 6th International Congress of the ISRM, 30 August –3 September, 1987, Montreal, Canada, pp 923–928. (in Germany)
Golser J (1979) Another view of the NATM. Tunn Tunn 11:41
Grimstad E, Barton N (1993) Updating the Q-system for NMT. In: Proceedings of the International Symposium on Sprayed Concrete-Modern use of wet mix sprayed concrete for underground support, Oslo, Norway
Hagenhofer F, Watts D (1990) NATH for tunnel with lingh overburden. Tunn Tunn 22(5):51–52
Holl GW, Fairon EG (1973) A review of some aspects of the shaft design. J South Afr Inst Min Metall 73(10):309–324
Hoek E, Brown ET (1997) Practical estimates of rock mass strength. Int J Rock Mech Min Sci 34(8):1165–1186. https://doi.org/10.1016/S1365-1609(97)80069-X
Hoek E, Carranza-Torres C, Corkum B (2002) Hoek-Brown failure criterion-2002 edition. In: Proceedings of NARMS-TAC, 7–10 July, 2002 Toronto, Japan 1(1):267–273
Hormazabal E, Soto C, Russo A, Carranza-Torres C (2012) Estimation of support requirement for large diameter ventilation shaft at Chuquicamata underground mine in Chile. In: Qian QH, Zhou YX (eds) Harmonising Rock Engineering and the Environment. CRC Press, Florida, pp 586–587
John M (1980) Investigation and design for the Arlberg expressway tunnel. Tunn Tunn 12(4):46–51
Jia XR (2010) Rock mechanics and strata control. China University of Mining & Technology Press, Jiangsu (in Chinese)
Karakuş M, Fowell RJ (2004) An insight into the new Austrian tunnelling method (NATM). In: The VIIth Regional Rock Mechanics Symposium, 21–22 October, 2004, Sivas, Turkey, pp 14
Kendorski FS, Hambley DF (1992) Other applications of geomechanics. In: Hartman HL (ed) SME Mining Engineering Handbook. Society for Mining, Metallurgy, and Exploration, United States, pp 972–988
Li J, Cheng LK, Li CJ et al (2015) Technical code for engineering of ground anchorages and shotcrete support. China Planning Press, Beijing (in Chinese)
Li CC (2017) Principles of rockbolting design. J Rock Mech Geotech 9(3):396–414. https://doi.org/10.1016/j.jrmge.2017.04.002
Li XP, Wang B, Zhou GL (2012) Research on distribution rule of geostress in deep stratum in chinese mainland. Chin J Rock Mech Eng 31:2875-2880. https://doi.org/10.3969/j.issn.1000-6915.2012.z1.036
Lee Y-K, Pietruszczak S (2008) A new numerical procedure for elasto-plastic analysis of a circular opening excavated in a strain-softening rock mass. Tunn Undergr Space Technol 23:588–599
Marinos P, Hoek E (2000) GSI: a geologically friendly tool for rock mass strength estimation. In: Proceedings of ISRM international symposium. 19–24 November, 2000, Melbourne, Australia, ISRM-IS-2000–035
McCreath DR (1980) Analysis of formation pressures on tunnel and shaft linings. M.S. Thesis, University of Alberta
Meng Q, Han L, Sun J, Min F, Feng W, Zhou X (2015) Experimental study on the bolt-cable combined supporting technology for the extraction roadways in weakly cemented strata. Int J Min Sci Techno 25(1):113–119. https://doi.org/10.1016/j.ijmst.2014.11.010
Merritt AH (1972) Geologic prediction for underground excavations. N Am Rapid Excav Tunn Conf Proc 1:115–132
Obert L, Duvall WI, Merrill RH (1959) Design of underground openings in competent rock. Government Printing Office, Washington D.C., pp 6–7
Oztork H (2000) Prediction of broken zone radius and lining thickness around circular mine shafts. M.S. Thesis. Middle East Technical University of Turkey
Ozturk H, Unal E (2001) Estimation of lining thickness around circular shafts. In: Proceedings of 17th international mining congress and exhibition of Turkey-IMCET2001, Ankara, Turkey, pp 437–444.
Ozturk H, Guler E (2016) A methodology for lining design of circular mine shafts in different rock masses. Int J Min Sci Techno 26(5):761–768. https://doi.org/10.1016/j.ijmst.2016.05.049
Panet M (1993) Understanding deformations in tunnels. In: Hudson JA et al (eds) Comprehensive Rock Engineering, vol 1. Pergamon Press, London, pp 663–690
Panet M (1995) Le calcul des tunnels par la méthode convergence-confinement. Presses de l’Ecole Nationale des Ponts et Chaussées, Paris
Purwanto W, Shimada S et al (2014) Support design of underground cut and fill mine by using Hybrid Numerical empirical model. J Geo Geosci 3(2):1–8. https://doi.org/10.4172/2329-6755.1000148
Pariseau WG (2017) Design analysis in rock mechanics. CRC Press, United States
Rocscience Inc. (2013) Phase2 Tutorials (version 8.014). Rocscience Inc., Toronto, Ontario, Canada
Salencon J (1969) Contraction quasi-statique d’une cavite a symetrie spherique ou cylindrique dans un milieu elastoplastique. Annales Des Ponts Et Chaussées 4:231–236
Sheorey PR (1994) A theory for in situ stresses in isotropic and transversely isotropic rock. Int J Rock Mech Min Geomech Abstr 31(1):23–34. https://doi.org/10.1016/0148-9062(94)92312-4
Singh B, Goel RK (2011a) Engineering rock mass classification: tunneling, foundations, and landslides. Butterworth-Heinemann, USA, pp 106–107. https://doi.org/10.1016/C2010-0-64994-7
Singh B, Goel RK (2011b) Engineering rock mass classification: tunneling, foundations, and landslides. Butterworth-Heinemann, USA, pp 104–105. https://doi.org/10.1016/C2010-0-64994-7
Terzaghi K (1943) Theoretical soil mechanics. John Wiley & Sons, New York, pp 11–15
Talobre JA (1957) La Mécanique des Roches appliqude aux travaux publics. Dunod, Paris, pp 228–233
Unal E (1996) Modified rock mass classification: M-RMR system. In: Bieniawski ZT (ed) Milestones in rock engineering, the Bieniawski jubilee collection. A.A. Balkema, Rotterdam/Brookfield, Illinois, pp: 203–223.
Unrug KF (1992) Construction of development openings. SME mining engineering handbook 2. Englewood, Colorado, pp 1580–1643
Vydrová LE (2015) Comparison of tunnelling methods NATM and ADECO-RS. Stavební obzor - Civ Eng J 24(1):1–7. https://doi.org/10.14311/CEJ.2015.01.0003
Vergne J (2003) Hard rock miner’s handbook. McIntosh Engineering, Ontario, USA
Wang Y (1996) Ground response of circular tunnel in poorly consolidated rock. J Geotech Eng-Asce 122(9):703–708. https://doi.org/10.1061/(ASCE)0733-9410(1996)122:9(703)
Wang YM (2012) Modern mining handbook. Metallurgical Industry Press, Beijing (in Chinese)
Xiao RL (2015) Review on development of mine shaft construction technology. Coal Sci Techno 43(8):13–22. https://doi.org/10.13199/j.cnki.cst.2015.08.003 (in Chinese)
Zhao DA, Chen ZM, Cai XL, Li SY (2007) Analysis of distribution rule of geostress in China. Chin J Rock Mech Eng 26(6):1265–1271. https://doi.org/10.3321/j.issn:1000-6915.2007.06.024
Zhao XD (2018) Basic theory and development trends of ultra-deep shaft construction. Metal Mine 502(04):7–16 (in Chinese). https://doi.org/10.19614/j.cnki.jsks.201804001
Zheng YR (2012) The stability analysis and design theory of surrounding rock of underground engineering. China communication press, Beijing (in Chinese)
Funding
The funding support for this study was provided by the National Key Research and Development Program of China (2016YFC0600803, 2018YFC0604401, and 2018YFC0604604) and the Project of NSFC-Shandong Joint Fund (U1806208).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that permission has been obtained from Xincheng Gold Mine for the use of engineering and geological data, and no potential conflicts of interest with respect to the research, authorship, or publication of this article.
Rights and permissions
About this article

Cite this article
Zhao, X., Li, Y. Estimation of support requirement for a deep shaft at the Xincheng Gold Mine, China. Bull Eng Geol Environ 80, 6863–6876 (2021). https://doi.org/10.1007/s10064-021-02350-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10064-021-02350-y