
Abstract
Gear transmission systems are one of the most frequently used systems for power transmission. The characteristics of a gear transmission system have important guiding significance in the design, manufacture and application of transmissions. This paper focuses on the influence of system parameters on the characteristics of a specific type of gear transmission, the nutation drive with double circular arc spiral bevel gears. Based on the transmission ratio analysis of single-stage and two-stage nutation drive systems, the system parameters, including nutation angle, gear spiral angle, pitch angle and cone distance, were defined. An analysis of the influence of system parameters on transmission efficiency was performed. Furthermore, the influence of system parameters on axial misalignment and cone displacement error was investigated. Finally, by changing the input frequency, input load, nutation angle, and spiral angle, variation regularity of the dynamic meshing force was obtained. A transmission performance analysis based on the influence of system parameters was achieved and provides the theoretical basis for better design of the nutation drive with double circular arc spiral bevel gear.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In mechanics, nutation movement is a new type of transmission mode based on the principles of planetary and gyroscopic motion. Advantages such as the simple structure, large transmission ratio, smooth transmission, and high transmission efficiency have driven a number of research studies into potential nutation transmission devices [1,2,3,4,5]. Elu et al. presented a nutation friction traction transmission mechanism and analyzed the efficiency of the proposed drive based on experimental data [6]. Uzuka and Suzumori demonstrated a new type of pneumatic and electromagnetic motor based on the principles of nutation [7,8,9]. Saribay et al. carried out analyses on the load and transmission performance of a bevel gear nutation drive system [10]. Further to this, Green et al. carried out dynamic analyses of the wobble plate and input rotor [11]. Wang et al. designed a roller nutation deceleration mechanism and deduced the theoretical profile equation of the stator and rotor to perform a dynamic analysis of the nutation reduction mechanism [12, 13]. Finally, Yao et al. proposed a double circular arc spiral bevel gear nutation drive mechanism and established a mathematical double circular arc spiral bevel gear tooth surface model [14,15,16,17,18,19,20].
While the aforementioned research has focused mainly on working principles, structure, and modeling of nutation devices, the influence of system parameters on the characteristics of a nutation drive with double circular arc spiral bevel gears has yet to be fully investigated. To the author’s knowledge, there is no existing literature on the displacement error and dynamic meshing force analysis for a nutation drive, however this type investigation has been performed for other types of transmission. Litvin et al. used a three-coordinate measuring instrument to collect data from the gear tooth surface and compared it to theoretical tooth surface data acquired using a coordinate transformation system to obtain gear error parameters [21]. Similarly, Simon et al. analyzed the contact characteristics of spiral bevel gears and the influence of the gear tilt error and tooth profile error on the meshing characteristics of spiral bevel gears [22]. Li et al. presented a new type of planetary transmission mechanism with a small difference in tooth number and carried out finite element analysis, transmission efficiency analysis, and dynamic simulations [23]. Based on the integral mean value theorem of a continuous function, Yao et al. deduced the transmission efficiency formula of an involute gear pair [24]. Using the theory of gear engagement and multi-body system theory, Ming et al. established the tooth surface equation of a face gear with error parameters [25]. Wang et al. deduced the tooth surface equation for a spiral bevel gear, which included the installation error, and the influence of errors on the contact characteristics was analyzed [26]. Li et al. described the contact process of the gear pair to assess the influence of installation, axial offset and manufacturing error on the meshing trace [27].
In this paper, an analysis of the influence of system parameters on the characteristics of the nutation drive is presented in an attempt to provide a solid theoretical foundation for the design of nutation drive systems.
2 System parameter optimization and influence on the transmission efficiency
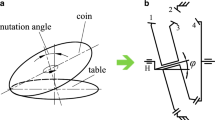
Nutation drive is a form of transmission, which is based on the principles of planetary and the gyroscopic motion. The basic concept of nutation motion can be explained by a coin rotating on a table. Initially, the coin rotates vertically and the angle between the tabletop and coin axis is 90°, as shown in Fig. 1a. Then, because of the eccentric torque and drag force, the coin begins to fall and rotates with a partial pendulum movement, which gradually reduces the angle between the tabletop normal axis and coin axis to less than 90° as shown in Fig. 1b. Finally, the coin stops flat on the table, as shown in Fig. 1c. The partial pendulum movement is called nutation and the angle between the tabletop normal axis and coin axis is called the nutation angle.

The principle diagram of nutation motion
The key to evaluating transmission is efficiency. The choice of different parameters greatly influences the efficiency of the transmission system; therefore this section will mainly discuss the influence of the nutation angle, spiral angle, cone distance and friction coefficient on transmission efficiency.
2.1 Transmission ratio, pitch angle and nutation angle optimization
The transmission ratio, pitch angle, and nutation angle are the main parameters of a nutation drive. The selection of these parameters determines the efficiency of transmission. Consequently, it is necessary to study the relationship between these parameters to obtain the optimum range of the nutation angle.
The kinematic diagrams of single-stage and two-stage nutation drive system are shown in Fig. 2.

Kinematic diagram of the single-stage and two-stage nutation drive
The transmission ratio of a single-stage nutation drive system can be given as
where \(z_{1}\), \(z_{2}\) are the tooth numbers of gear 1 and gear 2, respectively; \(\delta _{1}\) is the pitch angle of gear 1, and \(\phi\) is the nutation angle.
The transmission ratio of the two-stage nutation drive system can be given as
where \(z_{i}\) (\(i\) = 1, …, 4) is the tooth number of gear \(i\) (\(i\) = 1, …, 4), \(\omega _{5}\) represents the angular velocity of the carrier, and \(\omega _{4}\) represents the angular velocity of gear 4.
From the Eq. (1), we can obtain the following formula.
When a transmission ratio is given, such as \(i=-20\), the relationship between nutation angle and pitch angle of single-stage nutation drive can be illustrated (Fig. 3).

Relationship between nutation angle and pitch angle of single-stage nutation drive
At the initial stage shown in Fig. 3, the pitch angle of the nutation gear increases with the increase in nutation angle. However, when the nutation angle is greater than 5° the trend slows and the nutation gear pitch angle does not increase as rapidly. As the nutation angle reaches a certain value (approximately 15°), the nutation gear pitch angle remains constant even with the trend of slightly decreasing. When the nutation angle is greater than 15°, it is not conducive to the improvement of bearing capacity of the nutation gear and only the offset load increases. Therefore, the optimum range of the nutation angle is approximately 5° to 15°.
2.2 The effect of system parameters on efficiency
The transmission efficiency of the two-stage nutation drive can be obtained as
where \(\eta ^{H}\) is the meshing efficiency of the transformation mechanism.
As shown in Eqs. (4) and (5), transmission efficiency \(\eta _{H4}\) decreases with the increment of the transmission ratio \(i_{H4}\). In the following analysis, the influence of design parameters including nutation angle \(\phi\), spiral angle \(\upbeta\), cone distance R, and friction coefficient \(\upmu\) on transmission efficiency of the nutation drive system will be assessed. For simplicity, \(i_{H4}\) can be set to 78 and 105, respectively.
2.2.1 The influence of nutation angle
Assuming that the spiral angle \(\beta =25^{\circ}\), pressure angle \(\alpha _{n}=24^{\circ}\), friction coefficient \(\upmu =0.01\), cone distance \(\mathrm{R}1=60\,\text{mm}\), and \(\mathrm{R}2=50\,\text{mm}\). The transmission efficiency can be given in Fig. 4.

Relationship between transmission efficiency and nutation angle
The transmission efficiency \(\eta _{H4}\) decreases incrementally with nutation angle (Fig. 4). Thus, a smaller nutation angle should be chosen in order to improve the transmission efficiency.
2.2.2 The influence of spiral angle
Assuming that a nutation angle of \(\phi =5^{\circ}\), pressure angle \(\alpha _{n}=24^{\circ}\), friction coefficient \(\upmu =0.01\), cone distance \(\mathrm{R}1=60\,\text{mm}\), and \(\mathrm{R}2=50\,\text{mm}\), when β is in the range of 10° to 30° the transmission efficiency is illustrated in Fig. 5.

Relationship between transmission efficiency and spiral angle
The transmission efficiency \(\upeta _{H4}\) decreases incrementally with spiral angle (Fig. 5). As such, a smaller spiral angle should be chosen to further improve transmission efficiency.
2.2.3 The influence of cone distance
Assuming that the nutation angle \(\phi =5^{\circ}\), spiral angle \(\beta =25^{\circ}\), pressure angle \(\alpha _{n}=24^{\circ}\), and friction coefficient \(\upmu =0.01\), the transmission efficiency is obtained in Fig. 6.

Relationship between transmission efficiency and cone distance
Cone distance has almost no influence on transmission efficiency (Fig. 6), however, the choice of a larger cone distance will increase overall size and it is necessary to choose a smaller cone distance, which is more appropriate.
2.2.4 The influence of friction coefficient
Assuming that the nutation angle \(\phi =5^{\circ}\), spiral angle \(\beta =25^{\circ}\), pressure angle \(\alpha _{n}=24^{\circ}\), cone distance \(\mathrm{R}1=60\text{mm}\), and \(\mathrm{R}2=50\text{mm}\), the transmission efficiency can be plotted.
The transmission efficiency \(\eta _{H4}\) decreases incrementally with the friction coefficient (Fig. 7); therefore, the friction coefficient should be reduced to improve the transmission efficiency.

Relationship between transmission efficiency and friction coefficient
According to the above analysis, the friction coefficient has the biggest influence on transmission efficiency and varies in the range of 0.4 to 0.9. The quality and lubrication of the tooth surface should be improved by reducing the relative sliding friction coefficient thereby improving the transmission efficiency.
3 Influence analysis of system parameters on error
There is inevitable error in the processes of gear machining, installation, and abrasion. The influence of various parameters on transmission characteristics is important to facilitate the correct design, manufacture, and use of transmission systems and should be thoroughly investigated. The axial misalignment and cone displacement of meshing gears is illustrated in Fig. 8. Point O is the position of the conical point of the two gears with no error and point O 1 is the position of the conical point after the outer bevel gear is moved. The distance of the conical point moves is defined as \(\Updelta a_{1}\), and the angle between OO 1 and the outer bevel gear axis is \(\gamma _{1}\). Point O 2 is the position of the conical point after the internal bevel gear is moved, with the distance of the conical point moves denoted as \(\Updelta a_{2}\) and the angle between OO 2 and the internal bevel gear axis is \(\gamma _{2}\). The axial displacements of the main and passive bevel gears are \(l_{1}\) and \(l_{2}\), respectively.

The axial misalignment and cone displacement of meshing gears
3.1 Influence on the axial misalignment error
The bevel gear axial misalignment error produced two separate effects as shown in Fig. 8.
On the one hand, the change of meshing tooth depth is equivalent to a pair of meshing profile shifted gear. The addendum modification can be represented as
On the other hand, the change in pitch cone direction is equivalent to the change in base pitch on the pitch cone direction. The axial misalignment error can be represented as
Such that
Combining Eqs. (7), (8), with (9), the axial misalignment error can be represented as
From Eq. (10), it can be seen that the axial force due to meshing of the double-circular bevel gears is unavoidable causing axial displacement of the bevel gears \(l_{1}\) and \(l_{2}\), which affects the degree of misalignment, and hence, transmission performance of the nutation reducer.
The relationship between axial misalignment error, nutation angle, and transmission ratio is shown in Fig. 9. When the module m and the cone distance \(R\) are constant values, the axial misalignment error decreases incrementally with nutation angle. When the nutation angle remains constant, the axial misalignment error decreases with the transmission ratio.

Graphing showing the relationship between axial misalignment error, nutation angle and transmission ratio
The relationship between axial misalignment error, tooth number, and cone distance is presented in Fig. 10. When the module m and the transmission ratio are constant values, the axial misalignment error decreases incrementally with cone distance, whereas a constant cone distance results in an incremental increase in the axial misalignment error with number of teeth.

Relationship between axial misalignment error, tooth number and cone distance
3.2 Analysis of influence on cone error
From Fig. 8, the coning error of the bevel gear nutation drive can be divided into two parts according to the influence of the gear meshing:
(1) Changing along the direction of the tooth will cause interference between the two meshing bevel gears during the meshing process leading to transmission error. The tooth height dislocation amount V is:
(2) Changing along the direction of the pitch cone causes separation of the two meshing bevel gears such that the meshing area becomes smaller and destroys the normal meshing transmission. The cone displacement H is:
Substituting (8), (9) into (11) and (12), we can obtain the following:
According to Eqs. (10) and (11), displacement is related to transmission ratio \(i\), pitch cone distance \(R\), tooth number of outer bevel gear \(Z_{1}\), and modulus \(m\). Due to the large influence of cone displacement on gear transmission, the normal meshing transmission may be destroyed. The following discussion has been limited to the effect of the parameters on cone displacement. Among the parameters, error distance \(\Updelta a_{1}=\Updelta a_{2}=0.05mm\) and error position angle \(\gamma _{1}=\gamma _{2}=0\sim 360^{\circ}\).
As shown in Fig. 11, when the modulus \(m\), cone distance \(R\), transmission ratio \(i\), and tooth number of the external bevel gear \(Z_{1}\) are fixed, cone displacement gradually decreases as the nutation angle \(\phi\) increases. To reduce the influence of cone dislocation, a larger and more suitable nutation angle should be used where possible.

The influence of nutation angle on cone displacement
The influence of cone distance on cone displacement is illustrated in Fig. 12. When the modulus \(m\), nutation angle \(\phi\), transmission ratio \(i\), and tooth number of the external bevel gear \(Z_{1}\) are fixed, as the cone distance \(R\) increases, the cone displacement gradually decreases. Thus, a larger cone distance in accordance with the design requirements should be adopted to reduce the influence of cone dislocation.

The influence of cone distance on cone displacement
As presented in Fig. 13, when the modulus \(m\), cone distance \(R\), transmission ratio \(i\), and nutation angle \(\phi\) are fixed, as tooth number \(Z_{1}\) decreases, the cone misalignment gradually decreases; therefore, it is necessary to select a small tooth number in order to meet the bevel gear transmission ratio requirement.

The influence of tooth number of the external bevel gear on cone displacement
According to the influence of transmission ratio on cone displacement (Fig. 14), when the modulus \(m\), cone distance \(R\), nutation angle \(\phi\), and tooth number of external bevel gear \(Z_{1}\) are fixed, an increase in the transmission ratio \(i\) leads to a gradual decrease in cone misalignment. Importantly, when the transmission ratio reaches a threshold level, the influence of transmission ratio on cone displacement becomes very small, as verified by the graph. Therefore, to decrease dislocation effects, a larger transmission ratio is better.

The influence of transmission ratio on cone displacement
4 The influence of system parameters on dynamic meshing force
The dynamic meshing force plays an important role in the characteristics of shock, vibration, and noise. There are many factors affecting the dynamic meshing force of the gear transmission system under the actual mechanical transmission conditions. The influence of the input frequency, input load, nutation angle, and spiral angle on the dynamic meshing force will be discussed. To simplify the calculation, the external load on the system is modeled as a sine harmonic load.
In the process of meshing, the normal dynamic meshing force is generated on the tooth surface of the internal engaged spiral bevel gears. The meshing force can be decomposed into dynamic meshing forces along the radial, tangential, and axial directions. The force analysis of the gear is shown in Fig. 15.

The force analysis of the gear
The normal dynamic meshing force \(F_{n}\) of the bevel gear pair and the component forces (\(F_{x}\), \(F_{y}\), \(F_{z}\)) in their respective coordinate directions are:
where \(\delta\) is the pitch angle of the bevel gear, \(\alpha _{n}\) is the normal pressure angle, and \(\beta\) is the spiral angel of the bevel gear.
-
1.
The influence of input frequency on dynamic meshing force
The graph of input frequency and meshing force between the output internal bevel gear and input outer bevel gear is presented in Fig. 16. The abscissa is the time and the ordinate is the meshing force. The input speeds were set to 1000, 1200, 1500, and 2000 r/min. Based on the input speed, a corresponding frequency was calculated. As the input speed increases, the corresponding meshing force increases, and the degree of fluctuation of the corresponding vibration becomes larger (Fig. 16). The analysis shows as input speed increases, the corresponding input frequency also increases; therefore, the amplitude of vibration in the system is greatly increased. As a result, the dynamic meshing force and degree of fluctuation are correspondingly increased.
-
2.
The influence of input load on dynamic meshing force
Fig. 16 
Corresponding graph of input frequency and meshing force between the output internal bevel gear and input outer bevel gear
A graph of the input load as a function of meshing force between the output internal bevel gear and input outer bevel gear is shown in Fig. 17. Increasing the input load causes the corresponding meshing force to become larger, and the amplitudes of the meshing force corresponding to the rotational speed are: 50 N.m at 220 N, 100 N.m at 375 N, 150 N.m at 475 N and 250 N.m at 580 N. The corresponding vibration does not show much variation so the meshing force fluctuation can be said to remain unchanged. With an increase in the input torque, the amplitude of the system vibration increases as a result of the transmission system changing from a light load to heavy load. This results in a corresponding increase of the dynamic meshing force, but has no effect on fluctuation.
-
3.
The influence of nutation angle on dynamic meshing force
Fig. 17 
Graph of input load versus meshing force between the output internal bevel gear and input outer bevel gear
The influence of nutation angle on the dynamic meshing force is depicted in Fig. 18. The graph shows the dynamic engagement force for four nutation angles, 5°, 10°, 15° and 20°. The amplitude of the corresponding meshing force is almost unchanged and the corresponding vibration image does not change greatly with the increase in nutation angle (Fig. 18). From the analysis, the nutation angle was shown to have little influence on the dynamic meshing force.
-
4.
The influence of spiral angle β on dynamic meshing force
Fig. 18 
Graph of nutation angle and meshing force between the output internal bevel gear and input outer bevel gear
The influence of spiral angle on dynamic meshing force is illustrated in Fig. 19. The dynamic engagement forces for four spiral angles of the output internal bevel gear \(\beta\), 12°, 16°, 20° and 24°, is shown in Fig. 19. The increase of spiral angle resulted in smaller corresponding meshing force, and the corresponding vibration image was relatively unchanged such that the meshing force fluctuation is basically unchanged. It was found that as the spiral angle increases, the meshing between the gears becomes more and more stable, and the amplitude of the vibration of the system is reduced resulting in a corresponding decrease of the dynamic engaging force. While this has little influence on the fluctuation of dynamic meshing force, the spiral angle cannot be too large or it will cause the radial force to also become too large resulting in much larger deformation of the bearing, which leads to a destroyed meshing state.
Fig. 19 
Graph of spiral angle versus meshing force between the output internal bevel gear and input outer bevel gear
While the influence of additional parameters is also very important, they are not within the scope of this paper but should be considered in the future.




5 Conclusion
This paper focused on the influence of system parameters on the characteristics of the nutation drive. Analysis of the transmission efficiency was based on the nutation angle, spiral angle, cone distance, and friction coefficient. Considering the importance of system efficiency, our analysis has shown that an appropriate nutation angle is 0° to 15°, while the proposal range for the spiral angle is 10° to 25°. It was found that cone distance has little effect on efficiency however the friction coefficient had a much greater effect and should therefore be minimized. To realize high precision, transmission errors must be reduced as far as possible. Further to this, the nutation angle should be determined much larger in the preferred range, and the transmission ratio as small as possible. Moreover, this study has shown that the cone distance should be as large as possible and small tooth numbers are optimal. Finally, considering the dynamic meshing force, increasing the input frequency causes a sharp increase in amplitude resulting in a corresponding increase in the dynamic meshing force and the degree of fluctuation. The dynamic meshing force increases with the increasing input torque and decreases as the spiral angle of the bevel gear increases. No effect of the nutation angle on the dynamic meshing force was observed.
References
Hsieh SP, Hwang TS, Ni CW (2009) Twin-VCM controller design for the nutator system with evolutionary algorithms. IETE Technical Review (Institution of Electronics and Telecommunication Engineers, India) 26(4):290–302
Uzuka K, Enomoto I, Suzumori K (2009) Comparative assessment of several nutation motor types. Ieee/asme Trans Mechatronics 14(1):82–92
He SJ (2007) Theory research on output mechanism of conical roller in nutation gear. Coal Mine Mach 28(2):55–57
Kemper Y (1981) The nutating traction drive. J Eng Power 103(1):154–158
Maroth AM, Riede U (1973) Nutation drive: a high-ratio power transmission. Mech Eng 95(2):30–34
Elu P, Kemper Y (1980) Performance of a nutating traction drive. American Society of Mechanical Engineers (Paper). 1980(80-C2/DET-63):50–56
Uzuka K, Enomoto I, Suzumori K (2006) Development of nutation motors (1st report, driving principle and basic characteristics of pneumatic nutation motor). Trans Japan Soc Mech Eng 72(4):1194–1199
Uzuka K, Enomoto I, Suzumori K (2007) Development of nutation motors (4th report, development of small-sized and high torque pneumatic nutation motor by the OFW type bevel gears and principle of lever). Trans Japan Soc Mech Eng 73(6):1731–1737
Oda S, Suzumori K, Uzuka K et al (2010) Development of nutation motors (improvement of pneumatic nutation motor by optimizing diaphragm design). Journal of Mechanical Science and Technology 24(1):25–28
Saribay ZB, Bill RC (2013) Design analysis of pericyclic mechanical transmission system. Mech Mach Theory 61(1):102–122
Green I (2008) On the kinematics and kinetics of mechanical seals, rotors, and wobbling bodies. Mech Mach Theory 43(7):909–917
Wang GX, Zhu LL, Wan ZY et al Electromechanical integrated nutation movable teeth transmission device. Chin Pat 102594016:2012-07-18
Wang GX, He WJ et al (2016) Analysis of the contact strength of the tooth face on the central disk of the nutation tooth. J Dalian Jiaotong University 37(2):32–37
Gu B, Yao LG et al (2006) The analysis and modeling for nutation drives with double circular-arc helical bevel gears. Material Sci Forum 505:949–954
Cai YJ, Yao LG et al (2007) Kinematics and dynamics simulation of nutation drive of double circular arc spiral bevel gear. Transm Technol 21(4):22–26
Yao LG, Gu B et al (2010) Mathematical modeling and simulation of the external and internal double circular-arc spiral bevel gears for the nutation drive. Journal of Mechanical Design, ASME 132(2):021008.1–10
Lin Z, Yao LG (2013) Mathematical model and 3d modeling of involute spiral bevel gears for nutation drive. Adv Mat Res 697:503–506
Lin Z, Yao LG et al (2014) Contact trace of internal meshing double circular-arc spiral bevel gears. Adv Mat Res 945:822–825
Zhang J, Yao LG et al (2015) Tooth profile accurate modeling of internal and external double circular-arc spiral bevel gears. Modern Manufacturing Engineering 0(1):119–124. doi:10.16731/j.cnki.1671-3133.2015.01.013
Hong JL, Yao LG et al (2015) Kinematic modeling for the nutation drive based on screw theory. Procedia Cirp 36:123–128
Litvin FL, Kuan C, Wang JC et al (1993) Minmization of deviation of gear real tooth surfaces determined by coordinate measurements. J Mech Des Asme 115(4):995–1001
Simon V (2008) Influence of tooth errors and misalignments on tooth contact in spiral bevel gears. Mech Mach Theory 43(10):1253–1267
Li J (2007) Design and dynamic simulation research of the planetary gear transmission with axial series less teeth difference. Master Degree Thesis Chongqing University. doi:10.7666/d.y1139230
Yao JC, Chen YB et al (2001) Study on calculation method of meshing efficiency of gear transmission. Chin J Mech Eng 37(11):18–21
Ming XZ, Li MD et al (2014) The establishment and analysis of the gear surface equation with error surface based on multi body system theory. Mech Drive 38(11):1–4
Wang ZH, Yu J et al (2014) Analysis of the influence of installation errors on the contact trace of spiral bevel gears. Mech Transm 38(2):21–24
Li JH, Wang Q et al (2014) Gear tooth contact analysis considering the error. Mech Drive 38(3):133–136
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Cai, Y., Yao, L., Xie, Z. et al. Influence analysis of system parameters on characteristics of the nutation drive with double circular arc spiral bevel gears. Forsch Ingenieurwes 81, 125–133 (2017). https://doi.org/10.1007/s10010-017-0245-x
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10010-017-0245-x