
Abstract
This paper deals with in-plane and out-of-plane thermo-mechanical vibration and stability of curved single-walled carbon nanotubes (CSWCNT) conveying fluid and subjected to thermal and magnetic fields, based on Eringen’s nonlocal elasticity and curved Euler–Bernoulli beam theory. The Kelvin–Voigt model is employed to formulate the surrounding elastic medium to enhance the stability of the system. Given the assumptions of the modified inextensibility theory for the tube proposed by Misra et al., the in-plane and out-of-plane nonlocal equations of motion and boundary conditions are extracted using the variational principle approach. The differential quadrature (DQ) method is applied to the nonlocal equations of motion and boundary conditions to obtain natural frequencies of the CSWCNT for clamped–clamped end conditions. The present study aims to investigate the influence of diverse parameters including the nonlocal parameter, temperature changes, magnetic field intensity, fluid velocity, angle of the tube, and elastic foundation coefficients on the in-plane and out-of-plane vibration and stability of the CSWCNT. It is pertinent to mention that the results obtained from the present study could serve as a benchmark for future studies of curved nanotubes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In recent years, carbon nanotubes (CNTs) have become promising structures for diverse fields such as medicine, engineering, and agriculture due to their advantageous mechanical, thermal, electrical, and chemical characteristics, leading to many practical applications, such as nano-electro-mechanical systems, nano-devices for drug delivery, and chemical nanosensors [1,2,3,4,5,6,7,8,9,10,11]. As reported by other researchers, continuum-based theories have been used to study the mechanical behavior of CNTs because techniques such as molecular dynamic simulations are expensive and time-consuming [12,12,13,14,15,16].
Once the dimensions of structures become very small, the size effect should be taken into account in both theoretical and experimental investigations [16,17,18,19,20,21,22,23]. It is worth mentioning that classical continuum elasticity [24,25,26] is not capable of predicting the mechanical behavior of nano- and micro-structures because it does not take into account size effects. Thus, different non-classical continuum elasticity theories, including nonlocal elasticity [27,28,29,30], modified couple stress theory [31,32,33,34], and strain gradient theory (SGT) [35,36,37,38,39], have been developed for capturing the size effects in nano- and micro-structures. However, the nonlocal elasticity presented by Eringen [40] has been applied to investigate the size-dependent mechanical response of nano-beams [41, 42] and nano-plates [43,44,45,46].
Understanding the vibration characteristics of nanostructures is still a substantial area of study for many researchers. In the last decades, significant attention has been devoted to mechanical vibration and stability of single and multi-walled CNTs [12, 28, 47,48,49,50,51,52,53,54,55,56,57,58], nanoplates [43, 45, 59,60,61,62,63,64,65,66], and nanoshells [67,68,69,70,71,72,73]. In the work presented by Thai [74], bending, buckling, and vibration of Euler–Bernoulli nanobeams were investigated using the nonlocal theory of Eringen. In that study, Hamilton’s principle was used to extract the equations of motion and boundary conditions, which were solved analytically. Concerning Euler–Bernoulli beam theory with the consideration of the von Kármán geometric nonlinearity, Gheshlaghi and Hasheminezhad [75] investigated the effects of surface energy on the nonlinear vibration of micro- and nanobeams. Hao and Jian [76] analyzed the effects of internal moving viscoelastic fluid on the natural frequency of SWCNTs with clamped–clamped end conditions using the differential quadrature method and with consideration of the constitutive equation of a viscoelastic fluid via a Maxwell non-Newtonian fluid model. Lu et al. [77] developed a size-dependent sinusoidal shear deformation beam model to assess the free vibration of nanobeams utilizing strain gradient theory, in which the influences of the nonlocal parameter, material length scale parameter, slenderness ratio, and shear deformation were studied. Ghadiri et al. [78] researched free vibration analysis of functionally graded rotating nanobeams considering surface effects using the nonlocal theory of Eringen. Ansari and Arash [79] analyzed the vibration of double-walled carbon nanotubes using a nonlocal elastic shell model taking into account the van der Waals forces between tubes. They studied the effects of nonlocal parameters, layerwise boundary conditions, and geometrical parameters on the natural frequencies of the double-walled carbon nanotubes. Considering first-order shear deformation theory, Imani Aria and Friswell [80] presented a nonlocal finite element model for the analysis of free vibration of functionally graded (FG) nanobeams, in which the material properties were assumed to obey a power-law function. Based on Euler–Bernoulli beam model and nonlocal theory, Zhang et al. [81] analyzed the transverse vibration of double-walled carbon nanotubes resting on a viscoelastic foundation subjected to a longitudinal magnetic field. Xu et al. [82] carried out research on free vibrations of a double-walled carbon nanotube taking into account van der Waals effects between the inner and outer tubes; the results obtained from their study showed the effects of different boundary conditions, including cantilever, fixed-simple, and fixed–fixed. Atashafrooz et al. [83] carried out the vibration and instability analysis of carbon nanotubes conveying nano-flow taking into account surface effects according to the nonlocal strain gradient theory. Taking Gurtin–Murdoch's theory into account, they derived the nonlocal governing equations of motion using Hamilton's principle, solved by Galerkin's approach. In their study, the effects of the nonlocal parameters, surface effects, and Knudsen number on the natural frequency and critical flow velocity of carbon nanotubes were examined. Ansari et al. [84] carried out an analysis of the torsional vibration of carbon nanotubes utilizing the strain gradient theory and molecular dynamics simulations to capture the size effects. In that study, the governing equation and boundary conditions were deduced using Hamilton's principle, and solved by the generalized differential quadrature method. Also, they carried out molecular dynamic simulations for carbon nanotubes with different aspect ratios and boundary conditions. Taking nonlocal elasticity and the Timoshenko beam model into account, Wang et al. [85] studied the influences of the nonlocal parameter, axial load, and elastic medium on flexural waves in carbon nanotubes.
Investigation of curved pipes conveying fluid considering extensible [86] and inextensible [87] theories is difficult compared to straight pipes [88, 89] because of the configuration of the curved pipes. Therefore, less effort has been devoted to research on the dynamics and stability of fluid-conveying curved pipes in both large-scale and small-scale structures, and most of the existing literature is associated with the dynamic behavior of straight ones. In early studies performed by Chen [90,91,92], a linear model and exact solution for the analysis of in-plane and out-of-plane vibration and stability of fluid-conveying curved pipes was reported based on the “conventional” inextensible theory in which the initial forces due to the centrifugal and pressure forces produced by the internal fluid are neglected. Afterward, Misra et al. [87] proposed a “modified” inextensible theory which consists of the assumption of inextensibility of the centerline of the tube as in the conventional inextensible theory, but the steady-state initial forces due to the centrifugal and pressure forces are also taken into consideration. As reported more recently, Dini et al. [93] analyzed hygro-thermo-mechanical vibration and stability of curved double-walled carbon nanotubes conveying fluid, using Eringen’s nonlocal theory and the “conventional” inextensible theory. They examined the influences of different chirality, van der Waals interaction coefficient, nonlocal parameter, magnetic field, and visco-elastic foundation coefficients on the natural frequencies and stability of the curved carbon nanotubes. Malikan et al. [94] studied the dynamic response of non-cylindrical curved viscoelastic SWCNTs using nonlocal strain gradient elasticity, wherein a modified shear deformation beam theory was utilized to extract the governing equations of motion, solved by the Galerkin analytical method. In another work, Karami and Farid [95] introduced a new formulation for curved CNTs containing flowing fluid to investigate their in-plane free vibration using Eringen’s nonlocal elasticity theory and the finite element method, wherein the influences of the nonlocal parameter and the curvature of the pipe on the natural frequency and critical flow velocity were studied. Tang et al. [96] performed a three-dimensional vibration analysis of curved micro-pipes conveying fluid with fixed–fixed end conditions by employing the modified couple stress theory and Hamilton’s principle. Regarding the inextensible theory of curved pipes, Ghavanloo et al. [97] performed a free vibration analysis of fluid-conveying curved CNTs embedded in a viscoelastic foundation, modeled as a linear elastic cylindrical tube. In their study, they discretized the nonlocal equations of motion with the aid of the finite element method and obtained the natural frequencies by solving a quadratic eigenvalue problem. In another work, Mehdipour et al. [98] reported an elastic beam model for nonlinear vibration of a CSWCNT embedded in a Pasternak elastic medium utilizing the nonlocal continuum mechanics.
To the best of the authors’ knowledge, in the available literature there has been no attempt toward analyzing the in-plane and out-of-plane thermo-mechanical vibrations of curved single-walled carbon nanotubes conveying fluid based on nonlocal elasticity and the “modified” inextensible theory. The modified inextensibility of the tube developed by Misra et al. [87] has not been considered heretofore by other researchers to analyze the dynamical behavior of curved nano-beams. Thus, after deriving the governing equations using Hamilton’s principle, the differential quadrature method is applied to the nonlocal equations of motion and boundary conditions to obtain the natural frequencies of the CSWCNT for clamped–clamped end conditions. Finally, the effects of the nonlocal parameter, thermal and magnetic fields, fluid velocity, angle of the tube, and elastic foundation coefficients on the vibration response of the CSWCNT are reported.
2 Electrodynamic Maxwell’s relations
In this Section, Maxwell’s relations are presented. Taking \({\varvec{J}}\) as the current density, \({\varvec{h}}\) as the distributing vector of the magnetic field, \({\varvec{e}}\) as strength vector of the electric field, and \(\eta\) as magnetic permeability, Maxwell’s equations for an elastic body are given by [99, 100]:
wherein \(\nabla =\frac{\partial }{\partial x}{{\varvec{e}}}_{{\varvec{x}}}+\frac{1}{r}\frac{\partial }{\partial \theta }{{\varvec{e}}}_{{\varvec{\theta}}}+\frac{\partial }{\partial z}{{\varvec{e}}}_{{\varvec{z}}}\) is the Laplace operator in cylindrical coordinates and \(\left({{\varvec{e}}}_{{\varvec{x}}},{{\varvec{e}}}_{{\varvec{\theta}}},{{\varvec{e}}}_{{\varvec{z}}}\right)\) are the base vectors. For the present analysis, the magnetic and displacement fields in cylindrical coordinates \(\left(x,\theta ,z\right)\) are, respectively, considered as vectors \({\varvec{H}}=\left(0,{H}_{\theta },0\right)\) and \({\varvec{U}}=\left(u,w,v\right)\). Therefore,
in which \(u(\theta ,t)\), \(w(\theta ,t)\), and \(v(\theta ,t)\) indicate displacement components of the mid-surface in the radial, circumferential and axial directions \((x, \theta ,z)\), respectively. Therefore, \({\varvec{f}}\) is Lorentz’s force which may be expressed as follows:
in which \({f}_{x}\), \({f}_{\theta }\), and \({f}_{z}\) are Lorentz’s forces in the radial, circumferential, and axial direction, respectively.
3 Nonlocal elasticity theory
As introduced by Eringen [40, 101], the stress at a reference point \(x\) is assumed to be a function of the strain field at every point \({x}^{^{\prime}}\) in an elastic body \(V\). According to Eringen’s study, the basic equations of nonlocal theory for a linear and homogeneous elastic solids may be given as follows:
where \({C}_{ijkl}\) is the elastic modulus tensor for classical isotropic elasticity, \({\sigma }_{ij}\) and \({\varepsilon }_{ij}\) are the stress and strain tensors at point \(x\), respectively, \({u}_{i}\) is the displacement vector, \(\alpha \left(\left|x-{x}^{^{\prime}}\right|, \mu \right)\) is the nonlocal modulus or attenuation function incorporating into the constitutive equations the nonlocal effects at the reference point \(x\) produced by local strain at the source \({x}^{^{\prime}},\) \(\left|x-{x}^{^{\prime}}\right|\) is the distance in Euclidean form, and \(\mu\) is a material constant that depends on the internal (e.g., lattice parameter, granular size, the distance between C–C bonds) and external characteristic lengths (e.g., crack length, wavelength) [102]. A simplified equation in differential form is used as a basis of all nonlocal constitutive formulations because the integral constitutive Eq. (4.1) is difficult to solve. Therefore, a nonlocal differential equation based on Eq. (4.1) is defined as:
wherein ‘\(:\)’ represents the double dot product. The parameter \(\left({e}_{0}a\right)\) is the scale coefficient leading to small-scale effects on the response of the nano-scaled structures.
4 Thermo-mechanical vibration of nonlocal CSWCNT model
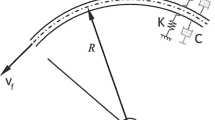
As shown in Fig. 1, a curved carbon nanotube with curvature \(R\), mass per unit length \({m}_{t}\), elastic modulus \(E\), moment of inertia \(I\), and cross-sectional area \(A\) is considered, and it is embedded in a Kelvin–Voigt elastic foundation which consists of a spring and a damper in parallel. It contains flowing fluid with mass per unit length \({m}_{f}\) and constant velocity \({v}_{f}\). Based on the curved Euler–Bernoulli beam theory, the circumferential strain for the CSWCNT can be expressed as [103]:

Schematic of a curved single-walled carbon nanotube conveying fluid
Also, the nonlocal constitutive Eq. (5) can be approximated for the CSWCNT as follows:
in which \({\sigma }_{\theta \theta }\) and \({\varepsilon }_{\theta \theta }\) are circumferential stress and circumferential strain, respectively. Given the assumption that there is no extension of the centerline of the CSWCNT, then \(u\) and \(w\) can be related by [91]:
The strain energy of the CSWCNT (\(\prod_{t}\)) is given by [92]:
where \(\alpha\) and \(\phi\) are the total angle of the CSWCNT and twist angle, respectively. Also, \(M_{i}\) is the bending moment in the nanotube which can be given by [92]:
Also, the work done by external forces is:
in which \({W}_{m}\), \({W}_{kv}\), and \({W}_{T}\) are the work done by the external magnetic field, the Kelvin–Voigt viscoelastic foundation, and thermal loading, respectively, expressed as
in which \({N}_{T}=EA\epsilon \Delta T\) is the normal force induced by a temperature change \(\Delta T\), and \(\epsilon\) is the thermal expansion coefficient. Also, in Eq. (12.2) we have
The kinetic energy of the CSWCNT \(\left({K}_{t}\right).\) can be given by
Also, the kinetic energy of the flowing fluid \(\left({K}_{f}\right)\) is defined as [92]:
The nonlocal governing equations and boundary conditions of the CSWCNT can be derived from Hamilton’s principle based on the following relation:
It is worth mentioning that the potential energy of the fluid is zero (\(\prod_{f} = 0\)) because the fluid is incompressible. By substituting Eqs. (9) and (11)–(15) into Eq. (16) and using Eq. (8), integrating by parts and setting the coefficients of \(\delta w,\delta v\), and \(\delta \phi\) to zero, the nonlocal equations of motion are obtained as
Combining Eq. (17) with Eq. (10) and after some manipulations, the nonlocal equations of motion for in-plane vibration and out-of-plane vibration can be given as follows.
4.1 In-plane vibration
4.2 Out-of-plane vibration
It is notable that \(\Pi\) is the steady-state combined force depending on the fluid flow velocity. In the modified-inextensible theory, in which \(\Pi\) is taken into account, the internal flow is only subject to a Coriolis force, whereas in the conventional inextensible theory, the internal flow is subject to the centrifugal, and Coriolis forces and the combined force \(\Pi\) is negligible. If both ends of the CSWCNT are supported and the gravity effect is ignored, then \(\Pi =-{v}_{f}^{2}\) [87]. Moreover, if the nonlocal parameter \(\mu\) is neglected and the effects of the thermal loading, magnetic field, and elastic foundation are absent, Eqs. (18) and (19) reduce to those obtained by Misra et al. [87]. Hence, by introducing the following dimensionless parameters:
the nonlocal equations of motion for the CSWCNT are given in dimensionless form as follows:
4.3 In-plane vibration
4.4 Out-of-plane vibration
The clamped–clamped boundary conditions are also described as follows.
In-plane vibration | Out-of-plane vibration | (23) |
\(\left.\begin{array}{c}w=0\\ u=0\\ \frac{\partial u}{\partial \theta }=0\end{array}\right\} at \theta =0, \alpha ;\) | \(\left.\begin{array}{c}v=0\\ \frac{\partial v}{\partial \theta }=0\\ \phi =0\end{array}\right\} at \theta =0, \alpha ;\) |
5 Differential quadrature method
Recently, the differential quadrature method (DQM) has been increasingly utilized for solving linear and nonlinear partial differential equations and is steadily emerging as an important discretization technique [100,101,106]. One of the most eminent benefits of the DQM is that it can yield extremely precise approximations with a few grid points, becoming a promising choice in comparison to different numerical solution techniques [107, 108]. The DQM has been successfully applied to diverse problems, introducing detailed formulations to solve linear and nonlinear differential equations [108]. The nature of the DQM is that the partial derivatives of a function of a space variable at a given point are approximated by a weighted linear summation of the function values at all discrete points in the domain. Consequently, the nth order derivative of function \(f(x)\) at a discrete point \({x}_{i}\) can be obtained by the weighted linear sum of the function values as [109]
where \({A}_{ij}^{(n)}\) is the weighting coefficient of the nth order derivative and \(N\) is the number of grid points. For the first derivative, the weighting coefficients can be obtained by [109]
in which \(L({x}_{i})\) is given as:
For the second-order and higher-order derivatives, the weighting coefficients are approximated as [109]
An effective method for selecting the grid points is obtained by employing the following equation:
where \(a\) and \(b\) are the first and last interval. A set of algebraic equations is given by applying the DQM to the nonlocal equations of motion and associated boundary conditions. Therefore, Eqs. (21) and (22) are approximated by using DQM as follows.
5.1 In-plane vibration
5.2 Out-of-plane vibration
By applying DQM in the domain and boundary, a set of equations is obtained as follows:
wherein the subscript \(b\) denotes elements associated with the boundary points, whereas subscript \(d\) indicates elements related to internal points. Also, the dot denotes differentiation with respect to time. The solution of Eq. (31) is assumed as
where \(\left\{ {\overline{U}} \right\} = \left\{ { \begin{array}{*{20}c} {\left\{ {\overline{U}_{d} } \right\}} \\ {\left\{ {\overline{U}_{b} } \right\}} \\ \end{array} } \right\}\) is an undetermined function of amplitude, and \(Im\left( \omega \right)\) is the natural frequency of the CSWCNT. Substituting Eq. (32) into Eq. (31), a homogeneous equation is obtained,
in which
A non-trivial solution of Eq. (33) is achieved by setting the determinant of the coefficient matrix equal to zero, that is
The natural frequencies of the fluid-conveying CSWCNT exposed to thermal and magnetic loadings can be obtained by approximating the eigenvalues of Eq. (35).
6 Simulation results and discussion
6.1 Verification of the GDQ method
The convergence of the GDQ method is first examined for a reliable solution. Regarding Fig. 2, a convergence investigation is performed to determine the 3rd mode natural frequency of the CSWCNT. It is obvious that once a sufficient number of nodes (\({N}_{GDQ}\)) is utilized, the natural frequency of the CSWCNT does not change remarkably. Therefore, the number of nodes \({N}_{GDQ}=20\) is considered for assurance and increasing the accuracy of results. It can be observed that the GDQ method can produce highly accurate approximations with a few grid points compared to other numerical methods.

The convergence of grid points for the 3rd mode in-plane natural frequency, (\(\alpha =\uppi ,\upbeta =0.5, \overline{\upmu }={\overline{\mathrm{K}} }_{\mathrm{kv}}={\overline{\mathrm{C}} }_{\mathrm{kv}}=\overline{\mathrm{N} }={\overline{\mathrm{H}} }_{\uptheta }=0\))
In addition, it is necessary to verify and confirm the GDQ method by comparing results with those given by Ref. [87] for in-plane and out-of-plane vibrations. To this end, the results are represented in Fig. 3 for a curved tube conveying fluid (\(\beta =0.5\)) in the absence of thermal loading, magnetic field, an elastic foundation (\(\overline{\mu }={\overline{K} }_{kv}={\overline{C} }_{kv}=\overline{N }={\overline{H} }_{\theta }=0\)), and a total angle \(\alpha =\pi\). Also, it should be pointed out that in all simulation results the clamped–clamped end conditions are considered for both in-plane and out-of-plane motions. It is obvious from Fig. 3 that the results obtained from the GDQ method are in a good agreement with those obtained by Ref. [87], showing the high precision of the GDQ.

Dimensionless frequency versus dimensionless flow velocity for in-plane and out-of-plane motions: a comparison between the present method and Ref. [87], (\(\alpha =\uppi ,\upbeta =0.5, \overline{\upmu }={\overline{\mathrm{K}} }_{\mathrm{kv}}={\overline{\mathrm{C}} }_{\mathrm{kv}}=\overline{\mathrm{N} }={\overline{\mathrm{H}} }_{\uptheta }=0\))
It should be pointed out that in the “conventional” inextensible theory, where the steady-state combined force \(\Pi\) is ignored, the influence of internal flow on the natural frequencies includes the centrifugal and Coriolis forces. Nevertheless, in the “modified” inextensible theory which considers the steady-state combined force \(\Pi\), the internal flow exerts only a Coriolis force. In the absence of gravity and when both ends of the CSWCNT are supported, the combined force is considered as \(\Pi =-{\vartheta }^{2}\) [87], and so the terms related to the combined force cancel out those arising from the centrifugal force [87]. Therefore, in the “modified” inextensible theory presented here, the CSWCNT does not lose stability as the flow velocity increases, whereas in the “conventional” inextensible theory used by Dini et al. [93] and Chen [90,91,92] the natural frequency decreases by increasing the flow velocity, vanishing at a certain critical velocity for both in-plane and out-of-plane motions, implying the onset of a static buckling-type instability.
6.2 Frequency analysis of the CSWCNT
In this Section, the size-dependent dynamical behavior for in-plane and out-of-plane vibrations of a CSWCNT conveying fluid is presented. Numerical studies are carried out to examine the effects of the nonlocal parameter, thermal loading, magnetic field, elastic foundation, and velocity of the fluid on the dimensionless in-plane and out-of-plane natural frequencies of the CSWCNT. To this end, the following dimensionless parameters are assumed for the calculations:
To study the effects of the total angle and flow velocity, Fig. 4 reveals how the 3rd mode natural frequency of the CSWCNT varies for different values of the angle and flow velocity. As shown, it is clear that as the angle and flow velocity increase, the CSWCNT becomes more flexible and the dimensionless in-plane and out-of-plane natural frequencies are reduced. In addition, it can be concluded that the values of the natural frequency for out-of-plane motion are significantly lower than for in-plane motion.

The effects of total angle and flow velocity on the 3rd mode natural frequency of the CSWCNT conveying fluid: a in-plane vibration, b out-of-plane vibration, (\(\overline{\upmu }=0.2,\upbeta =\overline{\mathrm{N} }=0.5, {\overline{\mathrm{K}} }_{\mathrm{kv}}={\overline{\mathrm{C}} }_{\mathrm{kv}}=1\))
The dimensionless natural frequency for different modes versus the dimensionless flow velocity is plotted in Fig. 5 which reveals the effects of nonlocal parameters on the frequency of the CSWCNT. Increasing the nonlocal parameters leads to decreasing the dimensionless in-plane and out-of-plane natural frequencies which results in a reduction in the stiffness of the system. A comparison between the in-plane and out-of-plane vibrations shows that the values of the natural frequency for in-plane vibrations are higher than those obtained for out-of-plane vibrations.

The effects of nonlocal parameters on the dimensionless natural frequency of the CSWCNT conveying fluid: a in-plane vibration, b out-of-plane vibration, (\(\alpha =\uppi ,\upbeta =\overline{\mathrm{N} }=0.5, {\overline{\mathrm{K}} }_{\mathrm{kv}}={\overline{\mathrm{C}} }_{\mathrm{kv}}={\overline{\mathrm{H}} }_{\uptheta }=1\))
Figure 6 depicts the effects of the thermal field on the dimensionless natural frequency of the CSWCNT for both in-plane and out-of-plane motions. It can be observed from Fig. 6 that the dimensionless in-plane and out-of-plane natural frequencies decrease by raising the thermal field, leading to declining stiffness of the system.

The effects of the thermal field on the dimensionless natural frequency of the CSWCNT conveying fluid: a in-plane vibration, b out-of-plane vibration, (\(\alpha =\uppi , \overline{\upmu }=0.2,\upbeta =0.5, {\overline{\mathrm{K}} }_{\mathrm{kv}}={\overline{\mathrm{C}} }_{\mathrm{kv}}={\overline{\mathrm{H}} }_{\uptheta }=1\))
The effects of magnetic field intensity on the dimensionless natural frequency of the CSWCNT conveying fluid for both in-plane and out-of-plane motions are plotted in Fig. 7. It is obvious that an increase in the magnetic field intensity leads to a growth in the dimensionless in-plane and out-of-plane natural frequencies which results in raising the stiffness of the system.

The effects of the magnetic field on the dimensionless natural frequency of the CSWCNT conveying fluid: a in-plane vibration, b out-of-plane vibration, (\(\alpha =\uppi , \overline{\upmu }=0.2,\upbeta =\overline{\mathrm{N} }=0.5, {\overline{\mathrm{K}} }_{\mathrm{kv}}={\overline{\mathrm{C}} }_{\mathrm{kv}}=1\))
To realize the effects of the damping and stiffness coefficients of the Kelvin–Voigt elastic foundation, Fig. 8 shows how the natural frequency of the CSWCNT varies concerning different values of the flow velocity. As depicted in Fig. 8, it is obvious that once stiffness and damping coefficients are chosen as \({\overline{K} }_{kv}=8\) and \({\overline{C} }_{kv}=1\) (i.e., \({\overline{K} }_{kv}>{\overline{C} }_{kv}\)), the dimensionless natural frequency is increased for both in-plane and out-of-plane motions, leading to an increase in the stiffness of the CSWCNT. Also, considering stiffness and damping coefficients as \({\overline{K} }_{kv}=1\) and \({\overline{C} }_{kv}=8\) (i.e., \({\overline{C} }_{kv}>{\overline{K} }_{kv}\)) results in a reduction in the dimensionless in-plane and out-of-plane natural frequencies, meaning that the CSWCNT becomes more flexible.

The effects of the visco-elastic foundation on the dimensionless natural frequency of the CSWCNT conveying fluid: a in-plane vibration, b out-of-plane vibration, (\(\alpha =\uppi , \overline{\upmu }=0.2,\upbeta =\overline{\mathrm{N} }=0.5, {\overline{\mathrm{H}} }_{\uptheta }=1\))
7 Conclusions
The paper aimed to develop a curved Euler–Bernoulli beam model based on nonlocal elasticity to examine in-plane and out-of-plane motions of a curved single-walled carbon nanotube conveying fluid and subjected to thermal loading and magnetic field. The “modified” inextensible theory was used in which the extension of the centerline of the tube is assumed to be negligible, but the initial or steady-state combined force due to the centrifugal and pressure forces is taken into account. The in-plane and out-of-plane nonlocal equations of motion and boundary conditions were derived using Hamilton’s principle. The GDQ method was utilized to obtain the natural frequencies of in-plane and out-of-plane vibrations. A comparison study was performed to verify the method and results with those given in the literature and increase the accuracy of the results. It was observed that the GDQ method can produce highly accurate approximations with a few grid points compared to other numerical methods. The effects of the small-scale parameter, total angle, flow velocity, thermal loading, elastic medium, and magnetic field were evaluated on the in-plane and out-of-plane motions. In the light of the foregoing observations, it can be inferred that the natural frequency of the CSWCNT conveying fluid is sensitive to the changes in the nonlocal parameter, thermal loading, magnetic field intensity, flow velocity, angle, and elastic medium coefficients. It was evident that for both in-plane and out-of-plane motions the natural frequency is decreased by raising the small-scale parameter and thermal loading, whereas it increases by raising the magnetic field intensity. Furthermore, it was observed that the dimensionless in-plane and out-of-plane natural frequencies decrease with increasing the flow velocity and total angle, leading to a reduction in the stiffness of the system. In addition, by using the “modified” inextensible theory for the nonlocal elasticity of Eringen, it was predicted that the CSWCNT supported at both ends does not lose stability with an increase in the flow velocity, as reported also by Misra et al. using classical elasticity.
References
Hoseinzadeh, M.S., Khadem, S.E.: Thermoelastic vibration and damping analysis of double-walled carbon nanotubes based on shell theory. Physica E 43(6), 1146–1154 (2011)
Rezaee, M., Maleki, V.A.: An analytical solution for vibration analysis of carbon nanotube conveying viscose fluid embedded in visco-elastic medium. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 229(4), 644–650 (2014)
Yan, Z., Jiang, L.: Electromechanical response of a curved piezoelectric nanobeam with the consideration of surface effects. J. Phys. D Appl. Phys. 44(36), 365301 (2011)
Ni, Z., Cao, X., Wang, X., Zhou, S., Zhang, C., Xu, B., Ni, Y.J.C.: Facile synthesis of copper (I) oxide nanochains and the photo-thermal conversion performance of its nanofluids. Coatings 11(7), 749 (2021)
Guo, J., Xiao, C., Gao, J., Li, G., Wu, H., Chen, L., Qian, L.J.T.I.: Interplay between counter-surface chemistry and mechanical activation in mechanochemical removal of N-faced GaN surface in humid ambient. Tribol. Int. 159, 10700 (2021)
Rudakiya, D., Patel, Y., Chhaya, U., Gupte, A.: Carbon nanotubes in agriculture: production, potential, and prospects. In: Panpatte, D.G., Jhala, Y.K. (eds.) Nanotechnology for Agriculture, pp. 121–130. Springer, Berlin (2019)
Patel, D.K., Kim, H.-B., Dutta, S.D., Ganguly, K., Lim, K.-T.J.M.: Carbon nanotubes-based nanomaterials and their agricultural and biotechnological applications. Materials 13(7), 1679 (2020)
Zhang, Y., Li, H., Li, C., Huang, C., Ali, H., Xu, X., Mao, C., Ding, W., Cui, X., Yang, M.: Nano-enhanced biolubricant in sustainable manufacturing: from process ability to mechanisms. Friction (2021). https://doi.org/10.1007/s40544-021-0536-y
Liu, C., Gao, X., Chi, D., He, Y., Liang, M., Wang, H.: On-line chatter detection in milling using fast kurtogram and frequency band power. Eur. J. Mech.-A/Solids (2021). https://doi.org/10.1016/j.euromechsol.2021.104341
Xiao, G., Song, K., He, Y., Wang, W., Zhang, Y., Dai, W.: Prediction and experimental research of abrasive belt grinding residual stress for titanium alloy based on analytical method. Int. J. Adv. Manuf. Technol. (2021). https://doi.org/10.1007/s00170-021-07272-3
Zhang, B., Chen, Y.-X., Wang, Z.-G., Li, J.-Q., Ji, H.-H.: Influence of Mach number of main flow on film cooling characteristics under supersonic condition. Symmetry 13(1), 127 (2021). https://doi.org/10.3390/sym13010127
Natsuki, T., Lei, X.-W., Ni, Q.-Q., Endo, M.: Free vibration characteristics of double-walled carbon nanotubes embedded in an elastic medium. Phys. Lett. A 374(26), 2670–2674 (2010)
Cigeroglu, E., Samandari, H.: Nonlinear free vibrations of curved double walled carbon nanotubes using differential quadrature method. Physica E 64, 95–105 (2014)
Soltani, P., Kassaei, A., Taherian, M.M.: Nonlinear and quasi-linear behavior of a curved carbon nanotube vibrating in an electric force field; an analytical approach. Acta Mech. Solida Sin. 27(1), 97–110 (2014)
Zhang, M., Zhang, L., Tian, S., Zhang, X., Guo, J., Guan, X., Xu, P.J.C.: Effects of graphite particles/Fe3+ on the properties of anoxic activated sludge. Chemosphere 253, 1266 (2020)
Mukherjee, A., Majumdar, S., Servin, A.D., Pagano, L., Dhankher, O.P., White, J.C.J.: Carbon nanomaterials in agriculture: a critical review. Front. Plant. Sci. 7, 172 (2016)
Liu, C., Ke, L.L., Wang, Y.S., Yang, J., Kitipornchai, S.: Buckling and post-buckling of size-dependent piezoelectric Timoshenko nanobeams subject to thermo-electro-mechanical loadings. Int. J. Struct. Stab. Dyn. 14(03), 1350067 (2014)
Ke, L.-L., Wang, Y.-S., Wang, Z.-D.: Nonlinear vibration of the piezoelectric nanobeams based on the nonlocal theory. Compos. Struct. 94(6), 2038–2047 (2012)
Murmu, T., McCarthy, M.A., Adhikari, S.: Nonlocal elasticity based magnetic field affected vibration response of double single-walled carbon nanotube systems. J. Appl. Phys. 111(11), 113511 (2012)
Xu, X., Karami, B., Shahsavari, D.: Time-dependent behavior of porous curved nanobeam. Int. J. Eng. Sci. 160, 103455 (2021). https://doi.org/10.1016/j.ijengsci.2021.103455
Zhao, X., Chen, B., Li, Y., Zhu, W., Nkiegaing, F., Shao, Y.: Forced vibration analysis of Timoshenko double-beam system under compressive axial load by means of Green’s functions. J. Sound Vib. 464, 115001 (2020). https://doi.org/10.1016/j.jsv.2019.115001
Zhao, X., Zhu, W., Li, Y.: Analytical solutions of nonlocal coupled thermoelastic forced vibrations of micro-/nano-beams by means of Green’s functions. J. Sound Vib. 481, 115407 (2020). https://doi.org/10.1016/j.jsv.2020.115407
Cui, X., Li, C., Ding, W., Chen, Y., Mao, C., Xu, X., Liu, B., Wang, D., Li, H.N., Zhang, Y.: Minimum quantity lubrication machining of aeronautical materials using carbon group nanolubricant: from mechanisms to application. Chin. J. Aeronaut. (2021). https://doi.org/10.1016/j.cja.2021.08.011
Dini, A., Nematollahi, M.A., Hosseini, M.: Analytical solution for magneto-thermo-elastic responses of an annular functionally graded sandwich disk by considering internal heat generation and convective boundary condition. J. Sandwich Struct. Mater. 23(2), 542–567 (2021)
Hosseini, M., Dini, A.: Magneto-thermo-elastic response of a rotating functionally graded cylinder. Struct. Eng. Mech. 56(1), 137–156 (2015)
Dini, A., Abolbashari, M.H.: Hygro-thermo-electro-elastic response of a functionally graded piezoelectric cylinder resting on an elastic foundation subjected to non-axisymmetric loads. Int. J. Press. Vessels Pip. 147, 21–40 (2016)
Reddy, J.N.: Nonlocal theories for bending, buckling and vibration of beams. Int. J. Eng. Sci. 45(2–8), 288–307 (2007)
Reddy, J.N., Pang, S.D.: Nonlocal continuum theories of beams for the analysis of carbon nanotubes. J. Appl. Phys. 103(2), 0235 (2008)
Aydogdu, M.: A general nonlocal beam theory: its application to nanobeam bending, buckling and vibration. Physica E 41(9), 1651–1655 (2009)
Wang, L.: Vibration and instability analysis of tubular nano- and micro-beams conveying fluid using nonlocal elastic theory. Physica E 41(10), 1835–1840 (2009)
Park, S.K., Gao, X.L.: Bernoulli–Euler beam model based on a modified couple stress theory. J. Micromech. Microeng. 16(11), 2355–2359 (2006)
Ma, H., Gao, X., Reddy, J.: A microstructure-dependent Timoshenko beam model based on a modified couple stress theory. J. Mech. Phys. Solids 56(12), 3379–3391 (2008)
Yin, L., Qian, Q., Wang, L., Xia, W.: Vibration analysis of microscale plates based on modified couple stress theory. Acta Mech. Solida Sin. 23(5), 386–393 (2010)
Ansari, R., Ashrafi, M.A., Hosseinzadeh, S.: Vibration characteristics of piezoelectric microbeams based on the modified couple stress theory. Shock. Vib. 2014, 1–12 (2014)
Mindlin, R.D., Eshel, N.N.: On first strain-gradient theories in linear elasticity. Int. J. Solids Struct. 4(1), 109–124 (1968)
Altan, B.S., Aifantis, E.C.: On some aspects in the special theory of gradient elasticity. J. Mech. Behav. Mater. 8, 231–282 (1997)
Aifantis, E.C.: Strain gradient interpretation of size effects. Int. J. Fract. 95(1), 299 (1999)
Lam, D.C.C., Yang, F., Chong, A.C.M., Wang, J., Tong, P.: Experiments and theory in strain gradient elasticity. J. Mech. Phys. Solids 51(8), 1477–1508 (2003)
Dini, A., Shariati, M., Zarghami, F., Nematollahi, M.A.: Size-dependent analysis of a functionally graded piezoelectric micro-cylinder based on the strain gradient theory with the consideration of flexoelectric effect: plane strain problem. Braz. Soc. Mech. Sci. Eng. 42(8), 1–22 (2020)
Eringen, A.C.: On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 54(9), 4703 (1983)
Eltaher, M.A., Emam, S.A., Mahmoud, F.F.: Static and stability analysis of nonlocal functionally graded nanobeams. Compos. Struct. 96, 82–88 (2013)
Şimşek, M., Yurtcu, H.H.: Analytical solutions for bending and buckling of functionally graded nanobeams based on the nonlocal Timoshenko beam theory. Compos. Struct. 97, 378–386 (2013)
Hosseini-Hashemi, S., Bedroud, M., Nazemnezhad, R.: An exact analytical solution for free vibration of functionally graded circular/annular Mindlin nanoplates via nonlocal elasticity. Compos. Struct. 103, 108–118 (2013)
Li, Y.S., Cai, Z.Y., Shi, S.Y.: Buckling and free vibration of magnetoelectroelastic nanoplate based on nonlocal theory. Compos. Struct. 111, 522–529 (2014)
Wang, W., Li, P., Jin, F., Wang, J.: Vibration analysis of piezoelectric ceramic circular nanoplates considering surface and nonlocal effects. Compos. Struct. 140, 758–775 (2016)
Izadpanahi, E., Moshtaghzadeh, M., Radnezhad, H. R., Mardanpour, P.: Constructal approach to design of wing cross-section for better flow of stresses. In: Proceedings AIAA Scitech 2020 Forum, p. 0275
Whitby, M., Quirke, N.: Fluid flow in carbon nanotubes and nanopipes. Nat. Nano. 2(2), 87–94 (2007)
Benzair, A., Tounsi, A., Besseghier, A., Heireche, H., Moulay, N., Boumia, L.: The thermal effect on vibration of single-walled carbon nanotubes using nonlocal Timoshenko beam theory. J. Phys. D Appl. Phys. 41(22), 225404 (2008)
Murmu, T., Pradhan, S.C.: Thermo-mechanical vibration of a single-walled carbon nanotube embedded in an elastic medium based on nonlocal elasticity theory. Comput. Mater. Sci. 46(4), 854–859 (2009)
Soltani, P., Taherian, M.M., Farshidianfar, A.: Vibration and instability of a viscous-fluid-conveying single-walled carbon nanotube embedded in a visco-elastic medium. J. Phys. D Appl. Phys. 43(42), 425401 (2010)
Xia, W., Wang, L.: Vibration characteristics of fluid-conveying carbon nanotubes with curved longitudinal shape. Comput. Mater. Sci. 49(1), 99–103 (2010)
Rafiei, M., Mohebpour, S.R., Daneshmand, F.: Small-scale effect on the vibration of non-uniform carbon nanotubes conveying fluid and embedded in viscoelastic medium. Physica E 44(7–8), 1372–1379 (2012)
Baghdadi, H., Tounsi, A., Zidour, M., Benzair, A.: Thermal effect on vibration characteristics of armchair and zigzag single-walled carbon nanotubes using nonlocal parabolic beam theory. Full. Nanotub. Carbon Nanostruct. 23(3), 266–272 (2015)
Ansari, R., Norouzzadeh, A., Gholami, R., Faghih Shojaei, M., Darabi, M.A.: Geometrically nonlinear free vibration and instability of fluid-conveying nanoscale pipes including surface stress effects. Microfluid. Nanofluid. (2016). https://doi.org/10.1007/s10404-015-1669-y
Bahaadini, R., Hosseini, M.: Nonlocal divergence and flutter instability analysis of embedded fluid-conveying carbon nanotube under magnetic field. Microfluid. Nanofluid. 20(7), 108 (2016)
Xu, K.Y., Guo, X.N., Ru, C.Q.: Vibration of a double-walled carbon nanotube aroused by nonlinear intertube van der Waals forces. J. Appl. Phys. 99(6), 064303 (2006)
Ke, L.L., Xiang, Y., Yang, J., Kitipornchai, S.: Nonlinear free vibration of embedded double-walled carbon nanotubes based on nonlocal Timoshenko beam theory. Comput. Mater. Sci. 47(2), 409–417 (2009)
Zhen, Y.-X., Fang, B., Tang, Y.: Thermal–mechanical vibration and instability analysis of fluid-conveying double walled carbon nanotubes embedded in visco-elastic medium. Physica E 44(2), 379–385 (2011)
Karličić, D., Adhikari, S., Murmu, T., Cajić, M.: Exact closed-form solution for non-local vibration and biaxial buckling of bonded multi-nanoplate system. Compos. B Eng. 66, 328–339 (2014)
Karličić, D., Kozić, P., Pavlović, R.: Free transverse vibration of nonlocal viscoelastic orthotropic multi-nanoplate system (MNPS) embedded in a viscoelastic medium. Compos. Struct. 115, 89–99 (2014)
Kiani, K.: Free vibration of conducting nanoplates exposed to unidirectional in-plane magnetic fields using nonlocal shear deformable plate theories. Physica E 57, 179–192 (2014)
Zhang, L.L., Liu, J.X., Fang, X.Q., Nie, G.Q.: Effects of surface piezoelectricity and nonlocal scale on wave propagation in piezoelectric nanoplates. Eur. J. Mech. A. Solids 46, 22–29 (2014)
Daneshmehr, A., Rajabpoor, A., Hadi, A.: Size dependent free vibration analysis of nanoplates made of functionally graded materials based on nonlocal elasticity theory with high order theories. Int. J. Eng. Sci. 95, 23–35 (2015)
Ansari, R., Shahabodini, A., Faghih Shojaei, M.: Nonlocal three-dimensional theory of elasticity with application to free vibration of functionally graded nanoplates on elastic foundations. Physica E 76, 70–81 (2016)
Hosseini, M., Bahreman, M., Jamalpoor, A.: Thermomechanical vibration analysis of FGM viscoelastic multi-nanoplate system incorporating the surface effects via nonlocal elasticity theory. Microsyst. Technol. 23(8), 3041–3058 (2017)
Moshtaghzadeh, M., Izadpanahi, E., Mardanpour, P.J.E.S.: Stability analysis of an origami helical antenna using geometrically exact fully intrinsic nonlinear composite beam theory. Eng. Struct. 234, 111894 (2021)
Ke, L.-L., Wang, Y.-S., Yang, J., Kitipornchai, S.: The size-dependent vibration of embedded magneto-electro-elastic cylindrical nanoshells. Smart Mater. Struct. 23(12), 1250 (2014)
Ke, L., Wang, Y., Reddy, J.J.C.S.: Thermo-electro-mechanical vibration of size-dependent piezoelectric cylindrical nanoshells under various boundary conditions. Compos. Struct. 116, 626–636 (2014)
Rouhi, H., Ansari, R., Darvizeh, M.: Size-dependent free vibration analysis of nanoshells based on the surface stress elasticity. App. Math. Model. 40(4), 3128–3140 (2016)
Ansari, R., Gholami, R., Norouzzadeh, A.: Size-dependent thermo-mechanical vibration and instability of conveying fluid functionally graded nanoshells based on Mindlin’s strain gradient theory. Thin-Walled Struct. 105, 172–184 (2016)
Razavi, H., Babadi, A.F., Beni, Y.: Free vibration analysis of functionally graded piezoelectric cylindrical nanoshell based on consistent couple stress theory. Compos. Struct. 160, 1299–1309 (2017)
Li, T., Dai, Z., Yu, M., Zhang, W.: Numerical investigation on the aerodynamic resistances of double-unit trains with different gap lengths. Eng. Appl. Comput. Fluid Mech. 15(1), 549–560 (2021)
Lan, Z., Zhao, Y., Zhang, J., Jiao, R., Khan, M.N., Sial, T.A., Si, B.: Long-term vegetation restoration increases deep soil carbon storage in the Northern Loess Plateau. Sci Rep 11(1), 1–11 (2021)
Thai, H.-T.: A nonlocal beam theory for bending, buckling, and vibration of nanobeams. Int. J. Eng. Sci. 52, 56–64 (2012)
Gheshlaghi, B., Hasheminejad, S.M.: Surface effects on nonlinear free vibration of nanobeams. Compos. B Eng. 42(4), 934–937 (2011)
Hao, N., Jian, Y.: Instability analysis of carbon nanotubes conveying viscoelastic fluid. J Phys. D App. Phys. 53(11), 1101 (2020)
Lu, L., Guo, X., Zhao, J.: Size-dependent vibration analysis of nanobeams based on the nonlocal strain gradient theory. Int. J. Eng. Sci. 116, 12–24 (2017)
Ghadiri, M., Shafiei, N., Safarpour, H.: Influence of surface effects on vibration behavior of a rotary functionally graded nanobeam based on Eringen’s nonlocal elasticity. Microsyst. Technol. 23(4), 1045–1065 (2017)
Ansari, R., Arash, B.: Nonlocal Flügge shell model for vibrations of double-walled carbon nanotubes with different boundary conditions. J. Appl. Mech. 80(2), 021006–021012 (2013)
Aria, A.I., Friswell, M.I.: A nonlocal finite element model for buckling and vibration of functionally graded nanobeams. Compos. B Eng. 166, 233–246 (2019)
Zhang, D., Lei, Y., Shen, Z.: Effect of longitudinal magnetic field on vibration response of double-walled carbon nanotubes embedded in viscoelastic medium. Acta Mech. Solida Sin. 31(2), 187–206 (2018)
Xu, K.-Y., Aifantis, E.C., Yan, Y.-H.: Vibrations of double-walled carbon nanotubes with different boundary conditions between inner and outer tubes. J. Appl. Mech. 75(2), 021013–021019 (2008)
Atashafrooz, M., Bahaadini, R., Sheibani, H.R.: Nonlocal, strain gradient and surface effects on vibration and instability of nanotubes conveying nanoflow. Mech. Adv. Mater. Struct. 27(7), 586–598 (2020)
Ansari, R., Gholami, R., Ajori, S.: Torsional vibration analysis of carbon nanotubes based on the strain gradient theory and molecular dynamic simulations. J. Vib. Acoust. 135(5), 051016–051016 (2013)
Wang, Y.-Z., Li, F.-M., Kishimoto, K.: Effects of axial load and elastic matrix on flexural wave propagation in nanotube with nonlocal Timoshenko beam model. J. Vib. Acoust. 134(3), 031011–031017 (2012)
Misra, A.K., Païdoussis, M.P., Van, K.S.: On the dynamics of curved pipes transporting fluid Part II: extensible theory. J. Fluids Struct. 2(3), 245–261 (1988)
Misra, A.K., Païdoussis, M.P., Van, K.S.: On the dynamics of curved pipes transporting fluid. Part I: Inextensible theory. J. Fluids Struct. 2(3), 221–244 (1988)
Liang, F., Yang, X.-D., Bao, R.-D., Zhang, W.: Frequency analysis of functionally graded curved pipes conveying fluid. Adv. Mater. Sci. Eng. 2016, 1–9 (2016)
Zhai, H.-B., Wu, Z.-Y., Liu, Y.-S., Yue, Z.-F.: In-plane dynamic response analysis of curved pipe conveying fluid subjected to random excitation. Nucl. Eng. Des. 256, 214–226 (2013)
Chen, S.-S.: Flow-induced in-plane instabilities of curved pipes. Nucl. Eng. Des. 23(1), 29–38 (1972)
Chen, S.: Vibration and stability of a uniformly curved tube conveying fluid. J. Acoust. Soc. Am. 51(1B), 223–232 (1972)
Chen, S.-S.: Out-of-plane vibration and stability of curved tubes conveying fluid. J. Appl. Mech. 40(2), 362–368 (1973)
Dini, A., Zandi-Baghche-Maryam, A., Shariati, M.: Effects of van der Waals forces on hygro-thermal vibration and stability of fluid-conveying curved double-walled carbon nanotubes subjected to external magnetic field. Physica E 106, 156–169 (2019)
Malikan, M., Nguyen, V.B., Dimitri, R., Tornabene, F.: Dynamic modeling of non-cylindrical curved viscoelastic single-walled carbon nanotubes based on the second gradient theory. Mater. Res. Express 6(7), 075041 (2019)
Karami, H., Farid, M.: A new formulation to study in-plane vibration of curved carbon nanotubes conveying viscous fluid. J. Vib. Control 21(12), 2360–2371 (2013)
Tang, M., Ni, Q., Wang, L., Luo, Y., Wang, Y.: Nonlinear modeling and size-dependent vibration analysis of curved microtubes conveying fluid based on modified couple stress theory. Int. J. Eng. Sci. 84, 1–10 (2014)
Ghavanloo, E., Rafiei, M., Daneshmand, F.: In-plane vibration analysis of curved carbon nanotubes conveying fluid embedded in viscoelastic medium. Phys. Lett. A 375(19), 1994–1999 (2011)
Mehdipour, I., Barari, A., Kimiaeifar, A., Domairry, G.: Vibrational analysis of curved single-walled carbon nanotube on a Pasternak elastic foundation. Adv. Eng. Softw. 48, 1–5 (2012)
Dai, H.L., Fu, Y.M., Dong, Z.M.: Exact solutions for functionally graded pressure vessels in a uniform magnetic field. Int. J. Solids Struct. 43(18–19), 5570–5580 (2006)
Zekios, C. L., Liu, X., Moshtaghzadeh, M., Izadpanahi, E., Radnezhad, H. R., Mardanpour, P., and Georgakopoulos, S. V.:Electromagnetic and mechanical analysis of an origami helical antenna encapsulated by fabric. In: Proceedings of International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, American Society of Mechanical Engineers, p. V05BT07A045
Eringen, A.C.: Nonlocal continuum field theories. Springer, Berlin (2002)
Ke, L.-L., Wang, Y.-S.: Thermoelectric-mechanical vibration of piezoelectric nanobeams based on the nonlocal theory. Smart Mater Struct 21(2), 025018 (2012)
Ebrahimi, F., Reza Barati, M.: Magneto-electro-elastic buckling analysis of nonlocal curved nanobeams. Eur. Phys. J. Plus (2016). https://doi.org/10.1140/epjp/i2016-16346-5
Bellman, R., Kashef, B.G., Casti, J.: Differential quadrature- A technique for the rapid solution of nonlinear partial differential equation. J. Comput. Phys. 10, 40–52 (1972)
Wu, T.Y., Liu, G.R.: A differential quadrature as a numerical method to solve differential equations. Comput. Mech. 24, 197–205 (1999)
Wu, T.Y., Liu, G.R.: The generalized differential quadrature rule for initial-value differential equations. J. Sound Vib. 233(2), 195–213 (2000)
Hosseini, M., Dini, A., Eftekhari, M.: Strain gradient effects on the thermoelastic analysis of a functionally graded micro-rotating cylinder using generalized differential quadrature method. Acta Mech. 228(5), 1563–1580 (2017)
Liu, G.R., Wu, T.Y.: Vibration analysis of beams using the generalized differential quadrature rule and domain decomposition. J. Sound Vib. 246(3), 461–481 (2001)
Bert, C.W.: Differential quadrature method in computational mechanics- a review. Appl. Mech. Rev. 49, 1–28 (1996)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Dini, A., Hosseini, M. & Nematollahi, M.A. On the size-dependent dynamics of curved single-walled carbon nanotubes conveying fluid based on nonlocal theory. Acta Mech 232, 4729–4745 (2021). https://doi.org/10.1007/s00707-021-03081-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-021-03081-7