
Abstract
We study the evolution of strictly mean-convex entire graphs over \({{\mathbb {R}}}^n\) by Inverse Mean Curvature flow. First we establish the global existence of starshaped entire graphs with superlinear growth at infinity. The main result in this work concerns the critical case of asymptotically conical entire convex graphs. In this case we show that there exists a time \( T < +\infty \), which depends on the growth at infinity of the initial data, such that the unique solution of the flow exists for all \(t < T\). Moreover, as \(t \rightarrow T\) the solution converges to a flat plane. Our techniques exploit the ultra-fast diffusion character of the fully-nonlinear flow, a property that implies that the asymptotic behavior at spatial infinity of our solution plays a crucial influence on the maximal time of existence, as such behavior propagates infinitely fast towards the interior.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
We consider a family of immersions \(F_t : M^n \rightarrow {{\mathbb {R}}}^{n+1}\) of n-dimensional mean convex hypersurfaces in \({{\mathbb {R}}}^{n+1}\). We say that \(M_t:=F_t(M^n)\) moves by inverse mean curvature flow if
where \(H(z, t) > 0\) and \(\nu (z, t)\) denote the mean curvature and exterior unit normal of the surface \(M_t\) at the point F(z, t).
The compact case is well understood. It was shown by Gerhardt [13] that for smooth compact star-shaped initial data of strictly positive mean curvature, the inverse mean curvature flow admits a smooth solution for all times which approaches a homothetically expanding spherical solution as \(t \rightarrow +\infty \), see also Urbas [22]. For non-starshaped initial data it is well known that singularities may develop; in the case n = 2 Smoczyk [21] proved that such singularities can only occur if the speed becomes unbounded, or, equivalently, when the mean curvature tends to zero somewhere during the evolution. In [16, 17], Huisken and Ilmanen developed a new level set approach to weak solutions of the flow, allowing “jumps” of the surfaces and solutions of weakly positive mean curvature. Weak solutions of the flow can be used to derive energy estimates in General Relativity, see [17] and the references therein.
In [18], Huisken and Ilmanen studied further regularity properties of inverse mean curvature flow with compact starshaped initial data of nonnegative mean curvature by a more classical approach than their works in [16, 17]. They showed that starshapedness combined with the ultra fast-diffusion character of the equation, imply that at time \(t >0\) the mean curvature of the surface becomes strictly positive yielding to \(C^\infty \) regularity. No extra regularity assumptions on the initial data are necessary. This work is reminiscent of well known estimates for the fast-diffusion equation
on a domain \(\Omega \subset {{\mathbb {R}}}^n\) and with exponents \(m <1\). We will actually see in the next section that under inverse mean curvature flow, the mean curvature H satisfies an ultra-fast diffusion equation modeled on (1.2) with \(m=-1\). The work in [18] heavily uses that the initial surface is compact which corresponds to the domain \(\Omega \) in (1.2) being bounded. However, the case of non-compact initial data has never been studied before.
Motivated by the theory for the Cauchy problem for the ultra-fast diffusion equation (1.2) on \({{\mathbb {R}}}^n \times (0,T)\), we will study in this work equation (1.1) in the case that the initial surface \(M_0\) is an entire graph over \({{\mathbb {R}}}^n\), i.e. there exists a vector \(\omega \in {{\mathbb {R}}}^{n+1}\), \(|\omega | = 1\) such that
We will take from now on \(\omega \) to be the direction of the \(x_{n+1}\) axis, namely \(\omega = e_{n+1} \in {{\mathbb {R}}}^{n+1}\). A solution \(M_t\) of (1.1) can then be expressed (at each instant t) as the graph \(\bar{F}(x,t)= (x,{{\bar{u}}}(x,t))\) of a function \({{\bar{u}}}: {{\mathbb {R}}}^n \times [0,T) \rightarrow {{\mathbb {R}}}\). In this parametrization, the inverse mean curvature flow (1.1) is, up to diffeomorphisms, equivalent to
where \(\perp \) denotes the normal component of the vector. Equation (1.3) can then be expressed in terms of the height function \(x_{n+1}={{\bar{u}}}(x,t)\) as the fully nonlinear equation
Entire graph solutions of the mean curvature flow have been studied by Ecker and Huisken in [8, 9]. It follows from these works, which are based on local a’priori estimates, that the mean curvature flow behaves in some sense better than the heat equation on \({{\mathbb {R}}}^n\): for an initial data \(M_0\) which is an entire graph over \({{\mathbb {R}}}^n\), no growth conditions are necessary to guarantee the long time existence of the flow for all times \(t \in (0,+\infty )\). See also in [11] for evolution of entire convex graphs by powers of mean curvature. In the case of other flows, the evolution of entire convex graphs was studied in the work by Alessandroni and Sinestrari [1] and Holland [15]. Recently, entire graph solutions of fully-nonlinear flows by powers of Gaussian curvature were studied by Choi, Daskalopoulos, Kim and Lee in [4]. This is an example of slow diffusion which becomes degenerate at spatial infinity. Finally, entire convex graph solutions of other fully-nonlinear flows which are homogeneous of degree one were recently studied by Choi and Daskalopoulos in [3].
This work concerns with the long time existence of inverse mean curvature flow for an initial data \(M_0\) which is an entire graph. In a first step we will establish in Theorem 4.1 the existence for all times \(t \in (0, +\infty )\) of solutions with strictly meanconvex initial data \(M_0 =\{x_{n+1} = {{\bar{u}}}_0(x)\}\) having superlinear growth at infinity, namely \(\lim _{|x| \rightarrow +\infty } |D {{\bar{u}}}_0(x)| = +\infty \), and satisfying a uniform "\(\delta \)-star-shaped" condition \(\langle F - {\bar{x}}_0, \nu \rangle \, H \ge \delta >0\) for some \({\bar{x}}_0 \in {{\mathbb {R}}}^{n+1}. \) These conditions for example hold for initial data \({\bar{u}}_0(x) = |x|^q\), for \(q >1\). The proof of this result uses in a crucial way the evolution of \(\langle F - {\bar{x}}_0, \nu \rangle \, H\) and the maximum principle which guarantees that this quantity remains bounded from below at all times.
The main result of the paper proves long-time existence and uniform finite time singular convergence for convex entire graphs with conical behavior at infinity. We will assume that \(M_0\) lies between two rotationally symmetric cones \(x_{n+1}=\zeta _i(\cdot ,0)\), with \(\zeta _1(\cdot ,0):= \alpha _0 \, |x|\) and \(\zeta _2(\cdot ,0):= \alpha _0 \, |x| + \kappa \), \(x \in {{\mathbb {R}}}^n\), namely \({{\bar{u}}}\) satisfies
for some constants \(\alpha _0 >0\) and \(\kappa >0\).

We will see that \(M_t\) will remain convex and will lie between the cones \(\zeta _1(x,t)=\alpha (t)\, |x|\) and \(\zeta _2(x,t)=\alpha (t)\, |x|+\kappa \) which are explicit solutions of (1.1), namely
The coefficient \(\alpha (t)\) is determined in terms of \(\alpha _0\) by the ordinary differential equation (3.3). We will see in Sect. 3 that \(\alpha (t) \equiv 0\) at a finite time \(T=T(\alpha _0)\), which means that the cone solutions \(\zeta _i\) become flat at time \(T(\alpha _0)\). Our goal in this work is to establish that the solution \(M_t\) of (1.1) with initial data \(M_0\) will also exist up to this critical time T, as stated next.
Theorem 1.1
Let \(M_0\) be an entire convex \(C^2\) graph \(x_{n+1}={{\bar{u}}}_0(x)\) over \({{\mathbb {R}}}^n\) which lies between the two cones as in condition (1.5). Assume in addition that the mean curvature H of \(M_0\) satisfies the global bound
Let \(T=T(\alpha _0)\) denote the lifetime of the cone with initial slope \(\alpha _0\). Then, there exists a unique \(C^\infty \) smooth solution \(M_t\) of the (1.1) for \(t \in (0,T)\) which is an entire convex graph \(x_{n+1}={{\bar{u}}}(x,t)\) over \({{\mathbb {R}}}^n\) and satisfies estimate (1.7) and has \(H >0\) for all \(t \in (0,T)\). As \(t \rightarrow T\), the solution converges in \(C^{1, \alpha }\) to some horizontal plane of height \(h \in [0, \kappa ]\).
Remark 1.1
(Vanishing mean curvature) Condition (1.8) implies that the initial data \(M_0\) has strictly positive mean curvature \(H>0\). Actually for generic initial data which is a graph \(x_{n+1} = {\bar{u}}_0(x)\) satisfying (1.5) one expects that \(H(x,{\bar{u}}_0(x)) \sim |x|^{-1}\) as \(|x| \rightarrow +\infty \). Hence, under the extra assumption \(H >0\) one has that (1.8) holds. It would be interesting to see if it is possible that the result of Theorem 1.1 is valid under the weaker assumption that (1.8) holds only near spatial infinity, thus allowing the mean curvature H to vanish on a compact set of \(M_0\).
Remark 1.2
The solutions in Theorem 1.1 have linear growth at infinity and they are critical in the sense that all other solutions are expected to live longer. For conical at infinity initial data, one has \(\langle F - {\bar{x}}_0, \nu \rangle \, H \sim |x|^{-1}\) as \(x \rightarrow +\infty \). We will see that maximum principle arguments do not apply in this case to give us the required bound from below on H which will guarantee existence. One needs to use integral bounds involving H. Since our solutions are non-compact special account needs to be given to the behavior at infinity of our solution. This is one of the challenges in this work.
Remark 1.3
(Graphical parametrization) While we use the graphical parametrization in conditions (1.5) and (1.7) and to establish the short time existence of our solution, for all the a priori estimates, which will occupy the majority of this work, we will use the geometric parametrization in (1.1) where \({\partial } F(z,t) / \partial t \) is assumed to be in the direction of the normal \(\nu \). This is because the evolution of the various geometric quantities becomes more simplified in the case of equation (1.1). In particular, \({\bar{u}}:= {\bar{u}}(x,t), x \in {{\mathbb {R}}}^n \) will denote the height function in the graph parametrization, while \(u:= {\langle F, \omega \rangle }\) will denote the height function in the geometric parametrization.
2 The geometric equations and preliminaries
We recall the evolution equations for various geometric quantities under the inverse mean curvature flow. Let \(g = \{g_{ij} \}_{ 1 \le i,j \le n}\) and \(A = \{ h_{ij} \}_{ 1 \le i,j \le n}\) be the first and second fundamental form of the evolving surfaces, let \(H = g^{ij}\, h_{ij}\) be the mean curvature, \(\langle F - {\bar{x}}_0, \nu \rangle \) be the support function with respect to a point \({\bar{x}}_0 \in {{\mathbb {R}}}^{n+1}\) and \(d\mu \) the induced measure on \(M_t\).
Lemma 2.1
(Huisken, Ilmanen [18]) Smooth solutions of (1.1) with \(H >0\) satisfy
-
(1)
\( \displaystyle \frac{\partial }{\partial t} g_{ij} = \frac{2}{H} \, h_{ij}\)
-
(2)
\(\displaystyle \frac{\partial }{\partial t} d\mu = d\mu \)
-
(3)
\(\displaystyle \frac{\partial }{\partial t} \nu = - \nabla H^{-1} = \frac{1}{H^2} \, \nabla H\)
-
(4)
\(\displaystyle \frac{\partial }{\partial t} h_{ij} = \frac{1}{H^2} \Delta h_{ij} - \frac{2}{H^3} \nabla _i H \nabla _j H + \frac{ |A|^2}{H^2} \, h_{ij}\)
-
(5)
\(\displaystyle \frac{\partial }{\partial t} H = \nabla _i \big ( \frac{1}{H^2} \, \nabla _i H \big ) - \frac{|A|^2}{H} = \frac{1}{H^2} \Delta H - \frac{2}{H^3} |\nabla H|^2 - \frac{|A|^2}{H}\)
-
(6)
\(\displaystyle \frac{\partial }{\partial t} H^{-1} = \frac{1}{H^2} \Delta H^{-1} + \frac{|A|^2}{H^2}\, H^{-1}\)
-
(7)
\(\displaystyle \frac{\partial }{\partial t} \langle F - {\bar{x}}_0, \nu \rangle = \frac{1}{H^2} \, \Delta \, \langle F - {\bar{x}}_0, \nu \rangle + \frac{ |A|^2}{H^2} \, \langle F - {\bar{x}}_0, \nu \rangle \).
We will next assume that \(M_t\) is a graph in the direction of the vector \(\omega \) and a smooth solution of (1.1) on \(0 < t \le \tau \) with \(H >0\) and we will derive the evolution of other useful geometric quantities under the IMCF. We will use the following identities that hold in terms of a local orthonormal frame \(\{ \mathbf{{e_i}}\}_{1 \le i \le n}\) on \(M_t\):
Lemma 2.2
The norm of the position vector \(|F|^2\) satisfies
Proof
We have
and
which readily gives (2.2). \(\square \)
Lemma 2.3
For any \({\bar{x}}_0 \in {{\mathbb {R}}}^{n+1}\) the support function \(H \, \langle F- {\bar{x}}_0, \nu \rangle \) satisfies the equation
Proof
Readily follows by combining the evolution equations of H and \( \langle F- {\bar{x}}_0, \nu \rangle \). \(\square \)
Lemma 2.4
For a graph solution \(M_t\), the quantity \(\langle \omega , \nu \rangle \) satisfies
Proof
We have
On the other hand
Hence, (2.4) holds. \(\square \)
Lemma 2.5
For a graph solution \(M_t\), the function \(\varphi := -H {\langle {\omega }, \nu \rangle }>0\) satisfies
Proof
Readily follows by combining the evolution of H and (2.4). \(\square \)
Lemma 2.6
For a graph solution \(M_t\), the height function \(u:= {\langle F, \omega \rangle }\) satisfies the evolution equation
Proof
It follows from
\(\square \)
We next consider the quantity
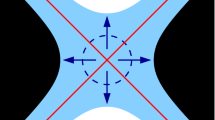
which will play a crucial role in this work. We will assume that our origin \(0 \in {{\mathbb {R}}}^{n+1}\) is chosen so that \({\langle F, \omega \rangle }>0\) (in particular this holds if \(M_t\) lies above the cone \(x_{n+1}= \alpha (t) \,|x|\) as in the picture (1.6)). Since \({\langle {\omega }, \nu \rangle }<0\), we have \({\langle {\hat{F}}, \nu \rangle }> 0\) on \(M_t\) for all \(0 \le t <\tau \).
Lemma 2.7
The quantity \({\langle {\hat{F}}, \nu \rangle }:= - {\langle F, \omega \rangle }\, {\langle {\omega }, \nu \rangle }>0\) satisfies the equation
Proof
Using the evolution equations for \({\langle F, \omega \rangle }\) and \({\langle {\omega }, \nu \rangle }\) shown in Lemmas 2.4 and 2.6 respectively, we conclude that
Since
the above readily yields (2.7). \(\square \)
Lemma 2.8
The product \(v:= {\langle {\hat{F}}, \nu \rangle }\, H\) satisfies the evolution equation
Proof
Combining the evolution equation of H given in Lemma 2.1 with (2.7), gives
from which (2.8) readily follows. \(\square \)
Lemma 2.9
Under the additional assumption that \(M_t\) is convex, the function \(v^{-1}:= ({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\) satisfies
Proof
Let \(v:={\langle {\hat{F}}, \nu \rangle }\, H\) as in Lemma 2.8. We have
which implies (2.9) since \(h_{ij} \, \langle \mathbf{{e_i}}, {\omega }\rangle \, \langle \mathbf{{e_j}}, {\omega }\rangle \ge 0\) by convexity. \(\square \)
Throughout this paper we will make use of the comparison principle in our non-compact setting. Although rather standard under our assumptions, for the convenience of the reader we will show next a proposition which justifies this. The assumptions are made so that it is applicable in our setting.
Proposition 2.10
(Comparison principle) Assume that \(f \in C^2 ({{\mathbb {R}}}^n \times (0,\tau )) \cap C^0 ({{\mathbb {R}}}^n \times (0,\tau ))\) satisfies the linear parabolic inequality
for some \(\tau >0\) with coefficients which are measurable functions and satisfy the bounds
and
for some constants \( 0< \lambda< \Lambda < +\infty \). Assume in addition that the solution f satisfies the polynomial growth upper bound
for some \(p >0\). If \(f(\cdot ,0) \le 0\) on \({{\mathbb {R}}}^n\), then \(f \le 0\) on \({{\mathbb {R}}}^n \times [0,\tau ]\).
Proof
To justify the application of the maximum principle it is sufficient to construct an appropriate supersolution \(\varphi \) of our equation. We look for such a supersolution in the form
for some exponent \(q >p\) and \(\theta =\theta (\Lambda , q) >0\) to be determined in the sequel. Defining the operator
a direct calculation shows that under the assumptions on our coefficients we have
for some constant \(C(\Lambda ,q)\) depending only on \(\Lambda , q\) and the dimension n. Hence, by choosing \(\theta := 2 C(\Lambda ,q)\) we conclude that \(\varphi \) satisfies the inequality
Now, setting \(\varphi _\epsilon := \epsilon \, \varphi \), we have
for \(R_\epsilon>>1\), since we have taken \(q >p\). Since, \(f_\epsilon \le 0 \le \varphi _\epsilon \) by assumption, the maximum principle guarantees that \(f \le \varphi _\epsilon \) on \({{\mathbb {R}}}^n \times (0,\tau )\) and by letting \(\epsilon \rightarrow 0\) we conclude that \(f \le 0\) on on \({{\mathbb {R}}}^n \times [0,\tau ]\) as stated in our proposition. \(\square \)
We will establish next, using the maximum principle, local and global \(L^\infty \) bounds from above on the mean curvature of our solution \(M_t\). We begin with the local bound. For the fixed point \({{\bar{x}}}_0 \in {{\mathbb {R}}}^{n+1}\) and number \(r >1\), we consider the cut off function
Proposition 2.11
(Local bound from above on H) For a solution \(M_t\) of (1.1) on \(t \in [0, \tau ]\), \(\tau >0\), if \( \sup _{M_0} \, \eta (F(\cdot ,0)) \, H(\cdot ,0) \le C_0\), then
Proof
We work on a local orthonormal frame \(\{ \mathbf{{e_i}}\}_{1 \le i \le n}\) on \(M_t\) where identities (2.1) hold. We have
and
and
We recall the H evolves by the equation
Using also the bound \(|A|^2/H \ge H/n\), it follows that
Since
the above yields
Using
we conclude that \(\varphi := \eta H\) satisfies
For the fixed \(r >0\) and \({{\bar{x}}}_0 \in {{\mathbb {R}}}^{n+1}\), let
Since \(\eta \le r^4\), it follows from the above differential inequality that m(t) will decrease if
Hence
\(\square \)
Remark 2.1
We note that Proposition 2.11 does not require the convexity of \(M_t\).
Proposition 2.12
(Global bound from above on H) For a convex graph solution \(M_t\) of (1.1) on \(t \in [0,\tau ]\), if \( \sup _{M_0} {\langle F, \omega \rangle }H(\cdot ,0) < \infty \), then
Proof
We will compute the evolution of \({\langle F, \omega \rangle }H \ge 0\) from the evolution of H given in Lemma 2.1 and the evolution of the height function \({\langle F, \omega \rangle }\) given by (2.6). Indeed, combining these two equations leads
Writing
and using \({\langle F, \omega \rangle }\ge 0\) and \({\langle {\omega }, \nu \rangle }\le 0\), we conclude that \( {\langle F, \omega \rangle }H\) satisfies
and the bound (2.13) readily follows by the comparison principle. \(\square \)
3 Self-similar solutions
We will study in this section self-similar entire graph solutions \(x_{n+1}={{\bar{u}}}(x,t)\) of the IMCF equation (1.4) which have polynomial growth at infinity, namely \({{\bar{u}}}(x,t) \sim |x|^q\), with \(q \ge 1\). These solutions are all rotationally symmetric.
First, we consider rotationally symmetric infinite cones in the direction of the vector \(\omega =e_{n+1}\). If the vertex \(P \in {{\mathbb {R}}}^{n+1}\) of the cone is the origin \(0 \in {{\mathbb {R}}}^{n+1}\) for its position vector F, then \({\langle F, \nu \rangle }=0\), otherwise \({\langle F, \nu \rangle }={\langle P, \nu \rangle }\). Since the cone is a rotationally symmetric graph, in its graph parametrization \(\bar{F}(x,t):=(x, \zeta (|x|,t))\), \(x \in {{\mathbb {R}}}^n\) it is given by a height function
for a constant \(\kappa \in {{\mathbb {R}}}\). The function \(\zeta \) is a solution of the equation
which is satisfied by any rotationally symmetric graph \(\bar{F}(x,t):=(x, {{\bar{u}}}(|x|,t))\), \(x \in {{\mathbb {R}}}^n\) which evolves by equation (1.3).

It follows from (3.2) that \(\alpha (t)\) satisfies the ODE
On the conical solution we have
and
We conclude that on the conical solution
Setting
we have
To compute the evolution of \(\gamma (t)\) and \(\beta (t)\) it is simpler to use the equations (2.4) and (2.7) which directly give
This is correct since \(\gamma (t)\) and \(\beta (t)\) are independent of the parametrization. We conclude that
Solving the last ODE’s with initial conditions \(\beta _0 \in (0,1)\) and \(\gamma _0:= (n-1)\, (1-\beta _0)\) yields
Finally, recalling that \(1+\alpha ^2(t)=\beta (t)^{-1}\), we conclude that the slope \(\alpha (t)\) of the conical solution is
It is clear from the above equations that the conical solution will become flat at time \(T(\alpha _0)\) given by
Next, let us briefly discuss other self-similar solutions of equation (1.4) which exists for all time \(t >0\) and they are also rotationally symmetric. It is simple to observe that the time t cannot be scaled in the fully-nonlinear equation (1.4). Nevertheless, equation (1.4) admits (non-standard) self-similar solutions of the form
for a suitable range of exponents \(\lambda >0\), where \(x_{n+1}={{\bar{u}}}_\lambda (x)\) are entire convex graphs over \({{\mathbb {R}}}^n\). The function \(x_{n+1}={{\bar{u}}}_\lambda (x)\), \(x \in {{\mathbb {R}}}^n\) satisfies the fully-nonlinear elliptic equation
Although equation (3.10) may possess non-radial solutions, restricting ourselves to rotationally symmetric solutions \(x_{n+1}={{\bar{u}}}_\lambda (r)\), \(r=|x|\), it follows that \({{\bar{u}}}:= {{\bar{u}}}_\lambda (r)\) satisfies the ODE
One needs to impose condition \({{\bar{u}}}(0)= \kappa <0\) to guarantee the existence of an entire convex solution. The following was shown by the authors and J. King in [6].
Theorem 3.1
(The existence of self-similar solutions) For every \(\lambda > 1/(n-1)\) and \(\kappa <0\), there exists a unique rotationally symmetric entire convex solution \(x_{n+1} = {{\bar{u}}}_\lambda (r)\) of (3.10) on \({{\mathbb {R}}}^n\) with \({{\bar{u}}}_\lambda (0) =\kappa \). In addition, \({{\bar{u}}}:={{\bar{u}}}_\lambda \) satisfies the following flux condition at \(r=+\infty \)
The condition (3.12) shows that \(u_\lambda (x) \sim |x|^\frac{\lambda \, (n-1)}{(n-1)\, \lambda -1}\) as \(|x| \rightarrow \infty \). Notice that since \(\lambda \) is any number \(\lambda > 1/(n-1)\), the exponent \(q:=\frac{\lambda \, (n-1)}{(n-1)\, \lambda -1}\) covers the whole range \(q \in (1,+\infty )\), hence each solution \(u_\lambda \) has a polynomial growth at infinity larger than that of the conical solution \(x_{n+1} = \alpha (t)\, |x| + \kappa \). It would be interesting to see whether the limit \(\lim _{\lambda \rightarrow +\infty } u_\lambda \) gives the conical solution or possibly another solution with super linear behavior as \(|x| \rightarrow \infty \).
4 The super-linear case and short time existence
In this section we assume that \(M_0\) is an entire graph \(\{x_{n+1} = {{\bar{u}}}(\cdot ,0)\}\) over \({{\mathbb {R}}}^n\) in the direction of the vector \({\omega }:= e_{n+1}\). We first prove long-time existence for solutions to (1.1) with superlinear growth that are \(\delta \)-starshaped (see below) and then we establish the short-time existence for the critical case of convex solutions that lie between the rotationally symmetric cones \(x_{n+1}=\zeta _i(\cdot ,0)\), with \(\zeta _1(\cdot ,0):= \alpha _0 \, |x|\) and \(\zeta _2(\cdot ,0):= \alpha _0 \, |x| + \kappa \), \(x \in {{\mathbb {R}}}^n\), as in (1.5). The solutions \(M_t\) are then given as the graph of \({{\bar{u}}}(\cdot ,t)\) satisfying (1.4).
In our first result, Theorem 4.1 below, we will assume that the initial data \(M_0\) is an entire graph \(x_{n+1} = {{\bar{u}}}_0(x)\) over \({{\mathbb {R}}}^n\) with superlinear growth at infinity, i.e.
and is strictly starshaped with a uniformity condition:
We say that \(M_0\) is \(\delta \)-starshaped if there is a point \({\bar{x}}_0 \in {{\mathbb {R}}}^{n+1} \cap \{(x, x_{n+1})| u_0(x) <x_{n+1} \}\) and a constant \(\delta >0\) such that the mean curvature H satisfies
everywhere on \(M_0\). By Lemma 2.3, this condition which provides a scaling invariant quantitative measure for the starshapedness of a hypersurface, is preserved under inverse mean curvature flow whenever the maximum principle can be applied.
Theorem 4.1
(Existence for superlinear initial data) Assume that the initial surface \(M_0\) is an entire graph \(\{(x, x_{n+1})|\,x \in {{\mathbb {R}}}^n, x_{n+1}={{\bar{u}}}_0(x)\}\) with \({{\bar{u}}}_0\in C^2({{\mathbb {R}}}^n)\) and satisfying the assumptions (4.1) and (4.2), for some \({\bar{x}}_0 \in {{\mathbb {R}}}^{n+1}\). Then, there is a smooth solution \(F: M^n \times [0, \infty ) \rightarrow {{\mathbb {R}}}^{n+1}\) of the inverse mean curvature flow (1.1) for all times \(t>0\) that can be written as a graph \(M_t = F(\cdot , t)(M^n) =\{x_{n+1}={{\bar{u}}}(x,t)\} \) with initial data \(M_0\). If \({{\bar{u}}}_0\) is convex, then the solution \(M_t\) is also convex for all time.
Remark 4.1
-
(i)
It is easy to see that the assumptions (4.1) and (4.2) are satisfied if \({{\bar{u}}}_0(x) = |x|^q\), provided \(q > 1\).
-
(ii)
The condition “\(\delta \)-starshaped" is reminiscent but different from the “\(\delta \)-non-collapsed" condition that has been used in mean curvature flow.
Remark 4.2
In the case of convex initial data, the condition \({{\bar{u}}}_0 \in C^2({{\mathbb {R}}}^n)\) in Theorem 4.1 may be replaced by the weaker condition \({{\bar{u}}}_0 \in C^2_{\mathrm{loc}}({{\mathbb {R}}}^n)\), since the mean curvature is uniformly controlled on compact sets.
Proof
By translating the surface we may assume that \({\bar{x}}_0 = 0\) is the origin of \({{\mathbb {R}}}^{n+1}\); then \({{\bar{u}}}_0(x) \ge C_0\) is bounded below everywhere by some negative constant. For the proof we will assume that \({{\bar{u}}}_0\in C^{2, \alpha } ({{\mathbb {R}}}^n)\). For initial data just in \(C^2\) as our theorem states, the result follows by approximation in view of the estimates we establish.
By the assumption (4.1) we may choose \(R_0 > 1\) such that \(|D{{\bar{u}}}_0(x)| \ge 100\) provided \(|x| \ge R_0\). We want to approximate \(M_0\) with compact surfaces by replacing the region \(\{ {{\bar{u}}}_0 \ge R\}\) of the surface with the reflection of the region \(\{ {{\bar{u}}}_0 \le R\}\) on the plane at height R. Set, for each \(R\ge R_0\)
and set
The outer unit normals \(\nu \) and \({\hat{\nu }}\) to the lower and and upper part of \(\Sigma _{0,R}\) are given by
respectively, where by definition \(D {\hat{u}}_{0,R} (x) = - D {{\bar{u}}}_0(x)\) and the mean curvatures H and \({\hat{H}}\) satisfy \({\hat{H}}(x, {\hat{u}}_{0,R}(x)) = H(x, {{\bar{u}}}_0(x))\). In particular we get that for \((x,x_{n+1}) \in \Sigma _{0,R}\) with \(x_{n+1} = R\)
In addition we compute that \({\hat{F}}_{R}(x,0) := (x, {\hat{u}}_{0,R}(x)\) satisfies
such that the surface \(\Sigma _R = \partial E_R\) is again uniformly \(\delta \)-starshaped. If the initial function u is convex, all regions \(E_R\) are convex as well.
Next we smoothen out the region \(x_{n+1}= {{\bar{u}}}_0(x) = R\) using mean curvature flow:
Lemma 4.2
Given \({{\bar{u}}}_0 \in C^{2, \alpha }({{\mathbb {R}}}^n)\), for each \(\Sigma _R = \partial E_R\) as above there is a one-parameter family of hypersurfaces \(\Phi : S^n \times [0, s_R] \rightarrow {{\mathbb {R}}}^{n+1},\, \Phi (\cdot , s) (S^n) = \Sigma _R(s),\, s_R>0,\) with initial data \(\Sigma _R(0) = \Sigma _R\) satisfying mean curvature flow
The surfaces \(\Sigma _R(s),\, s\in [0, s_R],\) are smooth and approach \(\Sigma _R\) in \(C^{0, 1/2}\) as \(s \rightarrow 0\). For small \(s_R >0\) they are \({\tilde{\delta }}\)-starshaped with \({\tilde{\delta }} \ge \delta - o(s^{\alpha /2})\). We may choose \(\sigma _R \in (0, s_R]\) such that \(\sigma _R \rightarrow 0\) as \(R \rightarrow \infty \) and all \(\Sigma _R(\sigma _R)\) are uniformly bounded in \(C^{2, \alpha }\). If \(u_0\) is convex, then \(\Sigma _R(\sigma _R)\) is strictly convex with some lower bound \(\lambda _R>0\) for all its principal curvatures.
Proof of Lemma 4.2
\(\Sigma _R\) is a uniformly Lipschitz hypersurface over its tangent spaces in view of (4.6), so we may solve mean curvature flow for a short time with \(\Sigma _R\) as initial data, compare ([9], Theorems 3.4 and 4.2), to obtain a smooth solution \(\Sigma _R(s)\) for (4.7) on some time interval \((0, s_R], s_R>0\) which approaches the initial data in \(C^{0, 1/2}\) as \(s \rightarrow 0\). For small \(s>0\) this solution has strictly positive mean curvature; this follows from the fact that \(\Sigma _R\) provides a barrier for Mean curvature flow and can be approximated by a smooth surface of strictly positive mean curvature from the inside, e.g. by gluing in arbitrary small sectors of an approximate cylinder along the edge \(x_{n+1} = R\). Since \(\bar{u}_0\in C^{2, \alpha }({{\mathbb {R}}}^n)\), the interior regularity estimates in [9] combined with Schauder theory yield
where \(r(p ) = |\Phi ^{n+1}(p,0) -R|\) is the distance to the singular set \(\{x_{n+1} = R\}\) and \(c(R )<\infty \) depends on the \(C^{2, \alpha }\)- norm of \({{\bar{u}}}_0\) on \(B_R(0)\). If \(y = \Phi (p_0,0)\) with \(y^{n+1} = R\) is a point on the edge formed between \(\mathrm{graph}({{\bar{u}}}_0)\) and \(\mathrm{graph}({\hat{u}}_{0,R})\), then in view of the uniform Lipschitz estimates for small s a rescaling of \(\Sigma _R(s)\) around y for \(s\rightarrow 0\) converges to the solution of mean curvature flow \(\Gamma (s) \times \,{{\mathbb {R}}}^{n-1}, 0<s<\infty \), where \(\Gamma (s)\) is the unique selfsimilar expanding solution of curve-shortening flow in the 2-plane containing \(e_{n+1}\) and \(D {{\bar{u}}}_0(p_0 )\) that is associated with the angle between \(\nu (p_0 )\) and \({\hat{\nu }}(p_0 )\). The unit normal to this solution interpolates between \(\nu (p_0 )\) and \({\hat{\nu }}(p_0 )\) while its geodesic curvature decays exponentially, in fact it has been shown in ([12], Lemma 6.4 ) that its geodesic curvature \(\kappa (r,s)\) at time s and distance r from y is given by
Here \(\kappa _{\max }({1}/{2})\) is determined by the opening angle between \(\nu , {\hat{\nu }}\) in such a way that \(\kappa _{\max }({1}/{2}) \rightarrow 0\) as this opening angle tends to 0, or, equivalently, \(|D{{\bar{u}}}_0| \rightarrow \infty \) on the edge \(\{x_{n+1} = R\}\) as \(R\rightarrow \infty \). Let \(\kappa _R\) be the largest such \(\kappa _{max}(1/2)\) arising from an opening angle on the edge \(\{x_{n+1} =R\}\). If we then choose \(\sigma _R \in (0, S_R]\) smaller than \(\kappa ^2_R\) we see that the surfaces \(\Sigma _R(\sigma _R)\) are uniformly bounded in \(C^{2, \alpha }\) in view of (4.9) and Schauder theory while approximating \(M_0\) uniformly in \(C^{2, \alpha }\) as \(R \rightarrow \infty \) since \(\sigma _R \le \kappa ^2_R \rightarrow 0\). Combining then the \(\delta \)-starshapedness in (4.2), (4.7) with the estimates (4.8) and (4.9) we see that \(\Sigma _R(\sigma _R)\) must be \({\tilde{\delta }}\)-starshaped with \({\tilde{\delta }} \ge \delta - o(\sigma _R^{\alpha /2})\). If the function \({{\bar{u}}}_0\) is convex then \(\Sigma _R(s), s>0\) will be uniformly convex by the strong parabolic maximum principle, i.e. there will be \(\lambda _R>0\) such that the eigenvalues \(\lambda _i, 1\le i\le n\) of the second fundamental form all satisfy \(\lambda _i \ge \lambda _R\) everywhere on \(\Sigma _R(\sigma _R)\).\(\square \)
Proof of Theorem 4.1 continued
Given a sequence of radii \(R_i \rightarrow \infty \) we may choose parameters \(\sigma _i := \sigma _{R_i} \rightarrow 0\) as in the preceding lemma with corresponding smooth approximating surfaces \(\Sigma ^i := \Sigma _{R_i}(\sigma _i)\) with \(\Sigma ^i = \partial E^i\) such that \(E^i \subset E^j\) for \(i<j\) and \(\Sigma ^i\) is \(\delta _i\)-starshaped with \(\delta _i \rightarrow \delta \) as \(i\rightarrow \infty .\) From the work of Gerhardt [13] (see also Urbas [22]), for each approximating surface \(\Sigma ^i\) there is a smooth solution \(\Sigma ^i(t), t\in [0, \infty )\) of inverse mean curvature flow starting from \(\Sigma ^i\) that approaches a homothetically expanding sphere as \(t\rightarrow \infty \). We now combine the \(\delta _i\)- starshapedness for each \(R>0\) with the local bound on the mean curvature obtained in proposition 2.11 such that
and therefore
holds everywhere on \(\Sigma ^i(t) \cap B_{{R}/{2}}(0)\) when \(R_i > 2R\). Hence \(\Sigma ^i(t)\) is uniformly starshaped in \(B_{{R}/{2}}(0)\) and we may use the local curvature bound in ([14], Theorem 3.6 and Remark 3.7) to conclude that
holds everywhere on \(\Sigma ^i(t) \cap B_{{R}/{4}}(0)\) when \(R_i > 2R\), where \(C_2\) depends on n and \((R \, \max _{M_0 \cap B_R(0)} H) \). Thus the solutions satisfy uniform curvature estimates independent of i on any compact set. Higher regularity then follows from known theory, see in [20]. To obtain a subsolution we choose for each \(T<\infty \) an \(0<\alpha _0=\alpha _0(T) <\infty , \kappa (T) > -\infty \) such that the conical solutions
from Sect. 3 provide a lower barrier for all \(\Sigma ^i(t)\) on \( t\in [0, T)\). Here \(\alpha _0\) is chosen so that T is the lifetime of the cones \(\zeta (\cdot , t)\). It follows that we can pass to the limit to obtain a solution \(M_t\) of the inverse mean curvature flow which is defined for all \(t \in (0,+\infty )\) and is \(C^\infty \) smooth. Note that \(M_t\) is again an entire graph: For each \(\rho >0\) the initial hypersurface \(M_0\) is \(\delta \)-starshaped also with respect to \({\bar{x}}_{\rho } = \rho {\omega }\) since \(H \langle F -{\bar{x}}_{\rho }, \nu \rangle = H \langle F, \nu \rangle - \rho H \langle {\omega }, \nu \rangle \ge \delta >0\) as \(\langle {\omega }, \nu \rangle \le 0\). If \(R_i >\rho \) this will also be true for \(\Sigma _i(0)\) and hence, by the maximum principle, on all \(\Sigma _i(t)\). Thus \(\langle F -\rho {\omega }, \nu \rangle >0\) for all \(\rho >0\) everywhere on all \(M_t\). Dividing by \(\rho \) and letting \(\rho \rightarrow \infty \) on compact subsets yields \(\langle -{\omega }, \nu \rangle \ge 0\) and hence \(\langle -{\omega }, \nu \rangle > 0\) by the strong maximum principle as desired.
If the initial surface \(M_0\) is convex, then each \(\Sigma _i(0)\) is uniformly convex by Lemma 4.2. Then in view of the result of Urbas [22] the surfaces \(\Sigma ^i(t), t\in [0, \infty )\) are also uniformly convex proving that all limit surfaces \(M_t\) are convex in this case. This completes the proof of the longtime existence of solutions with superlinear, \(\delta \)-starshaped initial data, as stated in Theorem 4.1. \(\square \)
We will give next a short time existence result for convex initial data \(M_0\) which lies between two cones as in condition (1.5).
Theorem 4.3
(Short time existence of asymptotically conical solutions) Let \(M_0\) be an entire convex graph \(x_{n+1}={{\bar{u}}}_0(x)\) over \({{\mathbb {R}}}^n\) which satisfies condition (1.5). Assume in addition that the mean curvature H of \(M_0\) satisfies the global bounds
Then, there exists \(\tau >0\) and a unique \(C^\infty \) smooth solution \(M_t\) of (1.1) for \(t \in (0,\tau ]\) which is an entire convex graph \(x_{n+1}={{\bar{u}}}(x,t)\) over \({{\mathbb {R}}}^n\) and satisfies condition (1.7). Moreover, on \(M_t\) we have
for a constant \(c_\tau >0\) depending on \(\tau \) and \(C:= \max \, ( C_0, 2n)\).
Remark 4.3
We note that on the graph \(M_0\) of any convex function \({\bar{u}}_0 \in C^{2}_{\mathrm{loc}}({{\mathbb {R}}}^n)\) which satisfies condition (1.5) one has
for some constant \(C_0\) which can be taken without loss of generality to be equal to \(C_0\) in (4.13).
Proof
For \(\epsilon \in (0,1)\), consider the approximations \(M^\epsilon _0\) of the initial surface \(M_0\) defined as entire graphs \(x_{n+1} = {{\bar{u}}}_{0,\epsilon }(x)\), with
Then, each \({{\bar{u}}}_{0,\epsilon } \) satisfies the conditions of Theorem 4.1 (with \({{\bar{u}}}_{\epsilon ,0} \in C^2_{\mathrm{loc}}\) instead of \({{\bar{u}}}_{0,\epsilon } \in C^2\)) and in addition it is strictly convex. By Theorem 4.1 and Remark 4.2 there exists a solution \(M^\epsilon _t\) to (1.1) on \(t \in (0,+\infty )\) with initial data \(M^\epsilon _0\). In addition \(M^\epsilon _t\) are smooth entire convex graphs given by \(x_{n+1} = {{\bar{u}}}_\epsilon (x,t)\), \(x \in {{\mathbb {R}}}^n\). The functions \({{\bar{u}}}_\epsilon \) satisfy equation (1.4). Since \({{\bar{u}}}_{0,\epsilon }\) satisfies \(\alpha _0 \, |x| \le {{\bar{u}}}_{0,\epsilon }(x) \le u_{0,1}(x)\) for all \(\epsilon \in (0,1)\), the comparison principle implies that for any \(0< \epsilon _1< \epsilon _2 <1\) we have
where T denotes the extinction time of \(\alpha (t)\). In particular, the monotone limit \({{\bar{u}}}:= \lim _{\epsilon \rightarrow 0} {{\bar{u}}}_\epsilon \) exists and satisfies
We will show next that \({{\bar{u}}}\) is a solution of (1.4) with initial data \({{\bar{u}}}_0\).
Claim 4.1
There exists \(\tau >0\) for which the limit \({{\bar{u}}}\) is a smooth convex solution of (1.4) on \({{\mathbb {R}}}^n \times (0,\tau )\) with initial data \({{\bar{u}}}_0\).
Proof of Claim 4.1
Consider the approximations \({{\bar{u}}}_\epsilon \) and denote by \(H_\epsilon \) the mean curvature of \(M^\epsilon _t\). Set \(v_\epsilon := {\langle {\hat{F}}_\epsilon , \nu \rangle }\, H_\epsilon \), where \( {\langle {\hat{F}}_\epsilon , \nu \rangle }\) denotes the quantity \({\langle {\hat{F}}_\epsilon , \nu \rangle }:= - \langle F_\epsilon , \omega \rangle \, \langle \omega , \nu _\epsilon \rangle \) on \(M_t^\epsilon \). Each \(v_\epsilon \) satisfies the equation (2.8) and since each \(M_t^\epsilon \) is convex the last term on the righthand side of (2.8) is nonnegative. Since \(\langle \omega , \nu _\epsilon \rangle \le 1\), we conclude that each \(v_\epsilon \) satisfies
Moreover, our initial conditions on \({{\bar{u}}}_0\) guarantee that \(v_\epsilon \ge c_0 >0\) for a uniform in \(\epsilon \) constant \(c_0\). The differential inequality (4.18) implies that
if we choose \(\tau := c_0/4\). On the other hand, our initial assumption that \(H \, {\langle F, \omega \rangle }\le C_0\) on \(M_0\) implies that \(H \, |F| \le C_1\) on \(M_0\), which in turn gives a uniform in \(\epsilon \) bound \(H_\epsilon \le C_2 /(1+|x|)\) on \(M^\epsilon _0\), for a uniform in \(\epsilon \) constant \(C_2\). Proposition 2.11, implies the bound
Combining the two estimates yields
for uniform in \(\epsilon \) and t constants \(c_R, C\). These bounds guarantee that the equation (1.4) is uniformly parabolic in \(\epsilon \) on compact sets and by standard regularity arguments the limit \({{\bar{u}}}\) will be a smooth convex solution of (1.4) with initial data \({{\bar{u}}}_0\). By passing to the limit in (4.19) and (4.20) we conclude that
for \(c:=c_0/2\). \(\square \)
It remains to show that the solution \({{\bar{u}}}\) satisfies the upper bound \({{\bar{u}}}(x,t) \le \alpha (t) \, |x| + \kappa \) in (1.7). To this end, we will first show that \({{\bar{u}}}(\cdot ,t)\) has linear growth at infinity which will allow us to apply the comparison principle Proposition 2.10.
Claim 4.2
The limit \({{\bar{u}}}\) satisfies the linear bound
for some constants \(\theta >0\) and \(\kappa _1 >0\).
Proof of Claim 4.2
First notice that for any pair \((\theta , \kappa )\) with \(\theta >0, \kappa \in {{\mathbb {R}}}\) an elementary calculation shows that the subgraph of the conical surface \(\zeta (x) = \theta \, r + \kappa , \, r=|x|\), is equal to the complement of a natural family of spheres lying above it:
Since \({{\bar{u}}}_{0}(x) \le \alpha _0 |x| + \kappa \), for each \(\rho _0 >0\) and \({\tilde{\epsilon }}>0\) we may now choose \(\epsilon _0 = \epsilon _0(\rho _0, {\tilde{\epsilon }}))>0\) such that for all \(0<\epsilon<\epsilon _0, 0<\rho <\rho _0\) the balls \(B_{\rho }(0, \rho \sqrt{1+\alpha _0^2} +{\tilde{\kappa }} + {\tilde{\epsilon }}),\, {\tilde{\kappa }} \ge \kappa ,\) are contained in the epigraph
of the approximating functions \({\bar{u}}_{0, \epsilon }\) given by (4.16). Using the barrier principle for IMCF applied to the resulting graphs of \({\bar{u}}_{t, \epsilon }\) and the balls expanding by IMCF, \(B_{\rho (t)}(0, \rho \sqrt{1+\alpha _0^2} +{\tilde{\kappa }} + {\tilde{\epsilon }}), \, \rho (t) = \rho \exp (t/n)\) we conclude from the monotone convergence of the \({\bar{u}}_{t, \epsilon }\) in the limit \({\tilde{\epsilon }} \rightarrow 0\) that the balls \(B_{\rho (t)}(0, \rho \sqrt{1+\alpha _0^2} +{\tilde{\kappa }}), \, {\tilde{\kappa }} \ge \kappa \) are contained in the epigraph of \({\bar{u}}_{t} = \lim {\bar{u}}_{t, \epsilon }\) for each \(\rho >0\). In other words,
Now note that
where
Since \(\cap _{\rho (t)} =\cap _{\rho >0}\) we get
which implies the claim
in view of (4.23) as required. Notice that \(\theta (t) > \alpha (t)\) for \(t>0\) such that this estimate cannot yet yield the optimal upper bound. \(\square \)
It remains to show that \({{\bar{u}}}(x,t) \le \alpha (t) \, |x| + \kappa \). This simply follows from the next claim, by comparing \({{\bar{u}}}\) with the conical solution \(\zeta _2(x,t):= \alpha (t) \, |x| + \kappa \).
Claim 4.3
Assume that \({{\bar{u}}}_1, {{\bar{u}}}_2\) are two smooth and convex entire graph solutions of equation (1.4) on \({{\mathbb {R}}}^n \times (0,\tau ]\) for some \(\tau >0\) which satisfy the bounds
for some constants \(0 < \alpha \le \theta \) and \(\kappa >0\). Assume in addition that \({{\bar{u}}}_i\), \(i=1,2\) both satisfy conditions (4.22). If \({{\bar{u}}}_1(\cdot ,0) \le {{\bar{u}}}_2(\cdot ,0)\), then \({{\bar{u}}}_1(\cdot ,t) \le {{\bar{u}}}_2(\cdot ,t)\) on \({{\mathbb {R}}}^n \times (0,\tau ]\).
Proof of Claim 4.3
To simplify the notation for any function \({{\bar{u}}}\) on \({{\mathbb {R}}}^n \times [0,\tau ]\), we set
Since both \({{\bar{u}}}_1\) and \({{\bar{u}}}_2\) satisfy
setting \({{\bar{u}}}_s := s\, u_1 + (1-s) u_2\), we have
where
The uniqueness assertion of our theorem will directly follow from Proposition 2.10 if we show that the coefficients \(a_{ij}\) and \(b_i\) satisfy conditions (2.10) and (2.11). To this end, we observe using (4.25) that
Since
we conclude that
Moreover, a direct calculation shows that
Observe next that (4.22), (1.7) and the convexity of \({{\bar{u}}}\) imply the uniform bound \(H \ge c/(1+|x|)\) on \(M_t\), \(t \in [0,\tau ]\) for some \(c >0\) and we also have the uniform bound from above \(H \le C/(1+|x|)\). It is easy to conclude then that \(a_{ij}\) satisfies
for some positive constants \(\lambda , \Lambda \). Also, convexity implies the bound \(|D^2 {{\bar{u}}}| /(1+|D{{\bar{u}}}|^2)^{1/2} \le C\, H\) which in turn gives
We can then apply Proposition 2.10 to conclude that \({{\bar{u}}}_1 \le {{\bar{u}}}_2\), as claimed. \(\square \)
Let us now conclude the proof of the Theorem 4.3. We have shown above that the limit \({{\bar{u}}}\) is a smooth convex solution of (1.4) which satisfies conditions (1.7) and (4.22), which in turn imply (4.14). The uniqueness assertion of the theorem readily follows by Claim 4.3 since (1.7) and (4.14) also imply (4.22). \(\square \)
We will next compute the behavior at infinity of \(v:= {\langle {\hat{F}}, \nu \rangle }\, H\), where \({\langle {\hat{F}}, \nu \rangle }:= - {\langle F, \omega \rangle }\, {\langle {\omega }, \nu \rangle }\). This will be crucial for the proof of Theorem 6.2 which is the main a’priori estimate in this work.
Proposition 4.4
Under the assumptions of Theorem 4.3, the function \(v:= {\langle {\hat{F}}, \nu \rangle }\, H\) on \(M_t\) satisfies the asymptotic behavior
with \(\gamma (t)\) given by (3.7).
Proof
We will use the graph representation \(x_{n+1}={{\bar{u}}}(x,t)\), \((x,t) \in {{\mathbb {R}}}^n \times [0,T)\), of the solution \(M_t\) of (1.1) for \(t \in (0,\tau ]\), as given by Theorem 4.3 and we will show that
for all \(\tau _0 \in (0, \tau /2)\), which readily yields (4.27). The function \({{\bar{u}}}\) satisfies the equation (1.4) and conditions (1.7) and (4.22). We may then consider H and \({\langle {\hat{F}}, \nu \rangle }\) as functions of \((x,t) \in {{\mathbb {R}}}^n \times [0,\tau ]\). Throughout the proof c, C will denote positive constants which may change from line to line but always remain uniform in t, for \(t \in [0,\tau ]\).
Since \({\langle {\hat{F}}, \nu \rangle }= {{\bar{u}}}/ (1+|D{{\bar{u}}}|^2)^{1/2}\), by (1.7) we have \({\langle {\hat{F}}, \nu \rangle }\le C \, |x|\), on \([0,\tau ]\). Combining this with (4.22) yields
In addition, (1.7) and the convexity of \({{\bar{u}}}\) imply the gradient estimate
The function \({{\bar{u}}}\) satisfies (4.26), where the fully nonlinear operator \({\mathcal {F}}\) is given by (4.25). For this proposition we will use an a priori estimate for fully-nonlinear parabolic equations which was proven by G. Tian and X-J. Wang in [22] (Theorem 1.1 in [22]) to show that the mean curvature H of our surface remains sufficiently close to that of the cone \(\zeta _1(x,t) = \alpha (t)\, |x|\), for |x| sufficiently large, because of condition (1.7). To this end, let \({\tilde{u}}\) be the function defined by
We notice that the ellipticity of the operator \({\mathcal {F}}\) depends on \(H(x,t) \sim |x|^{-1}\), for |x| large. Hence, equation (4.26) becomes singular as \(|x| \rightarrow \infty \). To avoid this issue it is more convenient to work in cylindrical coordinates for \(|x| \ge \rho \), with \(\rho \) large. Let \({\tilde{u}}\) be the function defined by (4.31) and express \({\tilde{u}}\) in polar coordinates \({\tilde{u}}(r,\theta _1,\ldots , \theta _{n-1},t)\), \(r=|x|\). We introduce cylindrical \((s,\theta _1,\ldots , \theta _{n-1})\) with \(s:=\log r\) and define the function \({{\hat{u}}}(s,\psi ,t)\) in terms of \({\tilde{u}}\), setting
It follows by a direct calculation that \({{\hat{u}}}\) satisfies an equation of the form
where \(D^2 {{\hat{u}}}:= D^2_{s,\psi } {{\hat{u}}}\) and \(D {{\hat{u}}}:= ({{\hat{u}}}_s, D_\psi {{\hat{u}}})\) denote first and second derivatives with respect to the cylindrical variable \((s,\psi )\). The nonlinearity \({\hat{{\mathcal {F}}}}\) also depends on \({{\hat{\gamma }}}\).
Observe first that (1.7) implies the bound
with \(C=C(\tau )\). Also, a direct calculation shows that
where by (4.30), \( \sqrt{1+ \alpha ^2(t) (1+ {{\hat{u}}}+ {{\hat{u}}}_s)^2 + |D_\psi {{\hat{u}}}|^2)} = 1 + |D {{\bar{u}}}|^2 \le C\). On the other hand, the condition \(|{\langle F, \nu \rangle }| \le C_0\) on \(M_0\) (see in (4.15)) and the maximum principle on the evolution of \({\langle F, \nu \rangle }\) given in Lemma 2.1 implies that \(| {\langle F, \nu \rangle }| \le C\) on \(M_t\) for \(t \in [0,\tau ]\). Hence, (4.33) implies the bound
For any \(s_0 \ge 0\), and \(\tau _0 \in (0,\tau )\), we set
so that \(Q_{s_0,\tau _0}^1 \subset Q_{s_0,\tau _0}^2\). It is not difficult to verify (using (4.32) and (4.34)) that the nonlinearity \({\hat{{\mathcal {F}}}}\) satisfies the assumptions of Theorem 1.1 in [22] on \(Q_{s_0,\tau _0}^2\), for any \(s_0 \ge 0\) with bounds that are independent from \(s_0\) (as long as \(s_0 \ge 0\)). It follows that from Theorem 1.1 in [22] that for any \(s_0 \ge 0\)
for an exponent \(\alpha >0\). Here \(C_{\tau _0}\) depends on the initial data, \(\tau \) and \(\tau _0\), but is independent of \(s_0\). This also implies the bound
Combining (4.35) with the bounds (4.32) and (4.34) gives \( \Vert e^{s_0}{{\hat{u}}}\Vert _{C^{2+\alpha }_{\mathrm{cyl}}(Q_{s_0,\tau _0}^1)} \le C_{\tau _0} < \infty . \) Since the constant \(C_{ \tau _1} \) is independent of \(s_0\) (as long as \(s_0 \ge 0\)) we finally obtain the bound
where \({\mathcal {C}}\) denotes the half cylinder given by \({\mathcal {C}}:= [0,+\infty ) \times S^{n-1}.\) This estimate shows that \({{\hat{u}}}\) is uniformly small in \(C^{2+\alpha }_{\mathrm{cyl}}\) norm as \(s \rightarrow +\infty \). Expressing the mean curvature \(v:={\langle {\hat{F}}, \nu \rangle }\, H\) in cylindrical coordinates we readily deduce that (4.28) holds, which also implies (4.27). \(\square \)
5 \(L^p\) bounds on 1/H
We will assume in this section that \(M_t\) is a solution of (1.1) on \([0,\tau ]\) as given by Theorem 4.3 which satisfies condition (1.7) and that \(\tau < T-3\delta \), for some \(\delta >0\) and small, where \(T=T(\alpha _0)\) denotes the extinction time of \(\alpha (t)\) given in terms of \(\alpha _0\) by (3.8). Recall that \(v:={\langle {\hat{F}}, \nu \rangle }\, H \), where \({\langle {\hat{F}}, \nu \rangle }= -{\langle F, \omega \rangle }\, {\langle {\omega }, \nu \rangle }\). Our goal is to establish a’priori bounds on suitably weighted \(L^p\) norms of \(v^{-1}(\cdot ,t)\) on \(M_t\), for any \(p \ge 1\), that depend on \(\delta \) but are independent of \(\tau \). In the next section we will use these \(L^p\) bounds and a Moser iteration argument to bound the \(L^\infty \) norm of \(v^{-1}\) on \(M_t\). This \(L^\infty \) bound constitutes the main a priori estimate on which the proof of the long time existence of the flow is based upon. We begin with the following straightforward observation which will be frequently used in the sequel.
Lemma 5.1
Assume that \(M_t\) is an entire convex graph over \({{\mathbb {R}}}^n\) satisfying (1.7) with \(\alpha (t) \le \alpha _0\). Then, \({\langle {\hat{F}}, \nu \rangle }:= - {\langle F, \omega \rangle }\, {\langle {\omega }, \nu \rangle }\), satisfies
Proof
We begin by noticing that the lower bound in condition (1.7) implies the bound
In addition, it follows from the convexity of \(M_t\) and (1.7) that \({\displaystyle - {\langle {\omega }, \nu \rangle }\ge \frac{1}{\sqrt{1+\alpha (t)^2}}.}\) Thus,
The last inequality follows from the definition of \(\gamma (t):= (n-1)\alpha (t)^2/(1+\alpha (t)^2)\) and \(\alpha (t) \le \alpha _0\). \(\square \)
We recall that \(v^{-1}:= ({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\) satisfies equation (2.9) and by (4.27) \( \lim _{|F| \rightarrow \infty } v(z,t)= \gamma (t)\), where \(\gamma (t)\) satisfies the ODE (3.6) with initial condition \(\gamma (0):=\gamma _0:=(n-1) \alpha _0^2/(1+\alpha _0^2)\).
Let \({{\hat{\gamma }}}(t)\) denote the solution of the ODE (3.6) with initial condition \({{\hat{\gamma }}}(0):={{\hat{\gamma }}}_0:=(n-1) {{\hat{\alpha }}}_0^2/(1+{{\hat{\alpha }}}_0^2)\) for some number \({{\hat{\alpha }}}_0\) that satisfies \(0< {{\hat{\alpha }}}_0 < \alpha _0\). Then, \({{\hat{\gamma }}}(t) < \gamma (t)\). Denote by \({\hat{T}}={\hat{T}}({\hat{\alpha }}_0)\) the vanishing time of \({{\hat{\gamma }}}\) that clearly satisfies \({\hat{T}} < T=T(\alpha _0)\). For a given number \(\delta >0\) (small) we will choose from now on \({{\hat{\alpha }}}_0\) such that the vanishing time \({\hat{T}}\) of \({{\hat{\gamma }}}\) satisfies
For that choice of \({{\hat{\gamma }}}\) we will have \({{\hat{\gamma }}}(t) < \gamma (t)\), for all \(t < {\hat{T}}\). Hence, if we set
then by (4.27) we have
We will next compute the evolution of w from the evolution of \(v^{-1}\), shown in (2.9), and the ODE for \(\hat{\gamma }\), shown in (3.6). Indeed, if we multiply (2.9) by \({{\hat{\gamma }}}(t)\) and use (3.6), we obtain
with
Next, we set
Because of (5.3), for each given \(t \in [0,\tau ]\), \(\tau<{\hat{T}} <T\), the function \({{\hat{w}}}(\cdot ,t)\) satisfies
for some \(R(t) < \infty \). Notice that the main difficulty in our proof comes from the fact that we don’t know that R(t) is uniform in t.
Lemma 5.2
(Energy inequality) Under the assumptions of Theorem 4.3, for any \(p \ge 0\), \(q:=(p+3)/2\) the function \({{\hat{w}}}:= (w-1)_+\) with \(w:={{\hat{\gamma }}}\, ({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\) satisfies
with \(\lambda , C(p)\) positive constants that depend on the initial data (and C(p) also on linearly p) and
Proof
If we first set \({\bar{w}} := w-1\), we see from (5.4) that
We next observe that since \({\langle {\omega }, \nu \rangle }^2 \le 1\) and \(c_1 \le 0\), we have \(4{\langle {\omega }, \nu \rangle }^2 + c_1 \le 4\), thus
with \(c_0(z,t) := (2{\langle {\omega }, \nu \rangle }^2 + c_1)_+\), \(c_1=2 {{\hat{\gamma }}}/(n-1) - 2\), hence given by (5.7). Let \({{\hat{w}}}:=(w-1)_+={\bar{w}}_+\). If we multiply the last inequality by \({{\hat{w}}}^p={\bar{w}}_+^p\), for some number \(p \ge 0\), and integrate by parts (recalling that by (5.5) \({{\hat{w}}}(\cdot ,t)\) has compact support in \(M_t\)), we obtain
Here we also used that \(\displaystyle {\partial } (d\mu ) /{\partial t} = d\mu \). Also, for \(p=0\) we use the inequality
We next remark that from the definition of \(w:= ({\langle {\hat{F}}, \nu \rangle }\, H)^{-1} {{\hat{\gamma }}}\), we may express \({\displaystyle H^{-1} = {{\hat{\gamma }}}^{-1} w \, {\langle {\hat{F}}, \nu \rangle }.}\) Also, \( {\displaystyle w\, \chi _{\{w > 1 \}} \ge (w-1)_+ = {{\hat{w}}}.}\) Hence, we may combine the two gradient terms on the right hand side of (5.8) to conclude
Writing
and using (5.1) we obtain
for some new positive constants \(c_i(p)\) depending (linearly) on p and the initial data. This readily gives (5.6) by setting \(q:=(p+3)/2\). \(\square \)
We will next prove the following variant of Hardy’s inequality adapted to our situation (see in [2] and [19] for standard Hardy inequalities on complete non-compact manifolds).
Proposition 5.3
(Hardy inequality) Let \(M_t\) be a solution of (1.1) as in Theorem 4.3. Then, there exists a constant \(C_n >0\) depending only on dimension n such that any function g that is compactly supported on \(M_t\), we have
Proof
To simplify the notation, set \(\rho (F):= |F| \) and recall that from our assumptions on \(M_t\) we have \(\rho >0\) everywhere. We begin by computing \(\Delta \rho \). We have
from which we conclude the lower bound
Let \(g:= \rho ^{\gamma } \psi \) for some \(\gamma <0\) to be chosen momentarily. We then have
We next observe that it is convenient to choose \(\gamma =-1/2\) which gives
or equivalently (using that \(\psi ^2 = g^2 \rho \))
After integrating by parts we obtain
Combining this with inequality (5.10) yields
from which (5.9) readily follows. \(\square \)
We will now combine (5.6) with the above Hardy inequality to prove the following \(L^{p+1}\) bound on \({{\hat{w}}}\) in terms of its initial data.
Theorem 5.4
\((L^{p+1}\) estimate on \({{\hat{w}}})\) Assume that \(M_t\) is a solution to (1.1) as in Theorem 4.3 defined for \(t \in (0,\tau ]\), and assume that \( \tau < T-3\delta \) with T given by (3.8) and \(\delta >0\). Then, for any \(p \ge 0\) there exists a constant \(C=C(p)\) depending on \(p, T, \delta \) and also on the constants \(\kappa , \alpha _0\) such that
Proof
We recall that \({{\hat{\gamma }}}(t)\) is a solution of the ODE (3.6) with initial value \(0< {\hat{\gamma }}(0) < \gamma (0)\) so that that its vanishing time \({\hat{T}}\) satisfies \(T-2\delta< {\hat{T}} < T-\delta \), for the given small number \(\delta >0\). For any number \(p >0\), set \(q:=(p+3)/2\). Applying (5.11) for \(g={{\hat{w}}}^q\) gives
We will next estimate \(|F| H \chi _{\{{{\hat{w}}}>0\}}\) in terms of \({{\hat{w}}}\). Recall that by definition \(w(\cdot ,t):={{\hat{\gamma }}}(t) \,({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\) and that from (5.1) we have \(|F| \le \lambda ^{-1} \, \gamma ^{-1/2} {\langle {\hat{F}}, \nu \rangle }\). Thus,
Since \(w \, \chi _{\{w>1\}} \le (w-1) \, \chi _{\{w >1\}} = (w-1)_+ = {{\hat{w}}}\), we have
Thus (5.13) yields
Recall that \(q=(p+3)/2\), so that \(2q-1=p+2\). If we now combine this last estimate with (5.6) and also use that \({{\hat{\gamma }}}^{-1}\gamma >1\) and \(n-1\ge 1\), we obtain the differential inequality
for constant C(p) depending on p and also on \(\kappa ,\alpha _0\) and with \(c_0(z,t)\) given by (5.7). We may apply the interpolation inequality
to \(g:={{\hat{w}}}\) to conclude that
for a new constant C(p) that depends on p and also on our initial data \(\alpha _0,\kappa \) and dimension n.
Because \(M_t\) is non-compact, in order to estimate the last term in (5.15) in terms of \({\displaystyle \int _{M_t} {{\hat{w}}}^{p+1} \, d\mu }\) we will need to look more carefully into the coefficient \(c_0(z,t)\). We claim the following.
Claim 5.1
Assume that \({{\hat{\gamma }}}(t)\) is chosen so that its vanishing time \({\hat{T}}\) satisfies \(T-2\delta < {\hat{T}} \le T-\delta \) for the given small number \(\delta >0\). Then, there exists a number \(R_\delta \ge 1\) (depending on \(\delta \)) such that
Proof of claim 5.1
Recall that \(c_0(\cdot ,t):= 2 \, \big ({\langle {\omega }, \nu \rangle }^2 +{{\hat{\gamma }}}(t)/(n-1) - 1 \big )_+\) and that \({{\hat{\gamma }}}(t) < \gamma (t)\) for all \(t < {\hat{T}}\). Since by definition \(\gamma (t)=(n-1)\, \alpha (t)^2/(1+ \alpha (t)^2)\) we may also express \({{\hat{\gamma }}}(t)=(n-1)\, {\hat{\alpha }}(t)^2/(1+{\hat{\alpha }}(t)^2)\) for some function of time function \({\hat{\alpha }}(t)\). It follows from the condition \(T-2\delta < {\hat{T}} \le T-\delta \) that
for some positive constants \(\mu _1(\delta ), \mu _2(\delta )\) that tend to zero as \(\delta \rightarrow 0\). Consider the cones defined by the graphs \(x_{n+1}= \alpha (t)\, |x|\) and \(x_{n+1} = {\hat{\alpha }}(t)\, |x| + \kappa \) over \(x \in {{\mathbb {R}}}^n\). These cones intersect at \(|x|= r(t):=\kappa /(\alpha (t)-{\hat{\alpha }}(t))\). Let \(R(t):=\sqrt{1+\alpha ^2(t)}\, r(t)\). It follows from (1.7) and a simple geometric consideration that uses the convexity of \(M_t\) that
Since,
the claim follows. \(\square \)
Using the above claim and the bound \(c_0(z,t) \le 2\), we may now estimate the term \({\displaystyle \int _{M_t} c_0(z,t) \, {{\hat{w}}}^p d\mu }\) in (5.15) as
Combining the last estimate with (5.15), we obtain
Since we have assumed that \({{\hat{\gamma }}}(t)\) vanishes at \({\hat{T}}\) and \(T-2\delta< {\hat{T}} < T-\delta \), it follows that \({{\hat{\gamma }}}(t)^{-1} \le C(\delta )\) for all \(t < T-3\delta \). We conclude from (5.17) that
for another constant \(C(p,\delta )\). After integrating this inequality in time t we conclude that if \(\tau < T-3\delta \), (5.12) holds. \(\square \)
6 \(L^\infty \) estimates on 1/H
We will assume throughout this section that \(M_t\) is an entire graph convex solution of (1.1) on \([0,\tau ]\) as in Theorem 4.3 and that \(\tau < T-3\delta \), for some \(\delta >0\), where T is the number given by (3.8). We will establish a local \(L^\infty \) bound on \(({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\) which holds on \(M_t\) for all \(t \in [0,\tau ]\) and depends only on the initial data, on T and on \(\delta \). This bound constitutes the main step in the proof of the long time existence result Theorem 1.1. It states as follows.
Theorem 6.1
\((L^\infty \) bound on w in terms of its spatial averages) Assume that \(M_t\) is a solution to (1.1) as in Theorem 4.3 defined for \(t \in (0,\tau ]\), and assume that \( \tau < T-3\delta \) with T given by (3.8) and \(\delta >0\). There exist absolute constants \(\mu >0\) and \(\sigma >0\) and a constant C that depends on \(\alpha _0, \kappa \), on \(\delta \), and the initial bound \(\sup _{M_0} {\langle F, \omega \rangle }\, H\), for which \(w:= {{\hat{\gamma }}}(t) \,({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\) satisfies the bound
for any \(t_0 \in (0,\tau /2]\).
For the proof of this theorem we will use a parabolic variant of Moser’s iteration on the differential inequality (5.4) that is satisfied by \(w:= {{\hat{\gamma }}}(t) \,({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\). Such technique was first introduced in the nonlinear parabolic context by Dahlberg and Kenig in [5]. In fact we will closely follow the proof in [5] (see also in the proof of Lemma 1.2.6 in [7]). For the inverse mean curvature flow in the compact setting, a similar bound was shown in [18] via a variant of the Stampacchia iteration method.
The estimate (6.1) will be shown in two steps Propositions 6.2 and 6.5 below. Let us begin by introducing some notation. For any given number \(t_0 \in (0,\tau ]\) we set
Also, for any given numbers \(\rho _0 > 1\), \(t_0 \in (0,\tau ]\) and \(r \in (0,1)\) we consider the cylinders in \({{\mathbb {R}}}^{n+1} \times (0,+\infty )\) given by
In particular, we set
Notice that since in equation (1.4) one cannot scale the time t, it is not necessary to use the standard parabolic scaling in the above cylinders, one can just use the same scale in \(\mathbf{x}\) and t.
Proposition 6.2
Assume that \(M_t\) is a solution to (1.1) as in Theorem 4.3 defined for \(t \in (0,\tau ]\), and assume that \( \tau < T-3\delta \) with T given by (3.8) and \(\delta >0\). There exist absolute constants \(\mu >0\) and \(\sigma >0\) and a constant C that depends on \(\alpha _0, \kappa \), on \(\delta \), and the initial bound \(\sup _{M_0} {\langle F, \omega \rangle }\, H\), for which \(w:= {{\hat{\gamma }}}(t) \,({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\) satisfies the bound
which holds for any \(\rho _0 >2\) such that \(Q_{\rho _0,t_0} \cap S_{t_0}\) is not empty.
Remark 6.1
For the remaining of this section we will call uniform constants the constants that may depend on the number \(\delta >0\), the constants \(\alpha _0, \kappa \), but that are independent of \(\rho _0\) and \({t_0}\).
Since w satisfies the differential inequality (5.4), if we set \({{\bar{w}}}:=\max (w,1)\) it follows that \({{\bar{w}}}\) satisfies the same differential inequality and since \({{\bar{w}}}\le {{\bar{w}}}^2\) we have
for some new constant \(c_2>0\).
Remark 6.2
In the following we shall not distinguish between the image F(z, t) of a point \( z \in M\) and its coordinate vector in \({{\mathbb {R}}}^{n+1}\).
For the given numbers \(\rho _0 >1\) and \(t_0 \in (0,\tau ]\) and any numbers \(1/4< r< {{\bar{r}}}< 1/2\), we consider a radial cutoff function \(\psi = \psi (\rho ,t), \rho =|\mathbf{x}|\), \(\mathbf{x}\in {{\mathbb {R}}}^{n+1}\) with \(\psi \in C^\infty _c (Q_{\rho _0,t_0}^{{{\bar{r}}}})\) satisfying
We extend \(\psi \) to be equal to zero outside \( Q_{\rho _0,t_0}^{{{\bar{r}}}}\) and define the function \(\eta \) on \(S_{t_0}\) by
Lemma 6.3
Under the assumptions of Theorem 6.2, for any \(p \ge 1\) and \(\theta :=(p+2)/2\), we have
where \(\eta \in C_c (S_{t_0})\) is the cutoff function defined by (6.5)
Proof
We begin by observing that the cutoff function defined by (6.5) satisfies
where we have denoted by \(\nabla \eta \) the gradient of \(\eta \) on M. The first inequality follows from (6.4) and the calculation
while the second inequality follows from (6.4) and the calculation
Using equation (6.3) and that \(\partial ( d \mu )/ \partial t = d\mu \), \({{\bar{w}}}\ge 1\) and \(H^{-1}= {{\hat{\gamma }}}^{-1} {\langle {\hat{F}}, \nu \rangle }\, w\), we have
with \({\bar{c}}_2 := c_2 \, p \, {{\hat{\gamma }}}^{-1} +1\). Let \(\theta =(p+2)/2\). Writing
we obtain
We estimate
to conclude
for a uniform constant C that is in particular independent of p. Also, by (6.7) we have
Using that
and
on the support of \(\eta \) and also that \({{\bar{w}}}\ge 1\), we obtain the bound
Since \(p \ge 1\), we have
Integrating (6.8) in time on (0, t] for all \(t \in (0,{t_0}]\) and using (6.7) and (6.9) yields
Using the bounds \({\bar{w}} \ge 1\), (5.1) and \( c\, \rho _0^2 \le {\langle {\hat{F}}, \nu \rangle }^2 \le |F|^2 \le C \rho _0^2\) and \({{\hat{\gamma }}}^{-1} \le C_\delta \), for \({t_0} < T-3\delta \), we obtain
Finally, using the estimate
we conclude (6.6). \(\square \)
We will prove next a variant of the following Sobolev inequality which holds on any complete manifold \(N^n\), with \(n \ge 3\)
and for any \(f \in C^1_c(N^n)\). When \(n=2\) we will use instead the inequality
which holds for any \(f \in C^1_c(N^2)\).
Lemma 6.4
We set \(q^*:= q/(q-1)\) with \(q=n/2\) if \(n \ge 3\) and \(q=2\) if \(n=2\). Then, for any \(k \in (0,q^*)\) and \(h \in C_c^{1,0}(S_{t_0})\) we have
with \(\lambda =0\) if \(n \ge 3\) and \(\lambda =1/2\) if \(n=2\).
Proof
Since \(h(\cdot ,t) \in C_c^{1}(M_t)\), it follows from (6.10) that for \(n \ge 3\) and any \( t \in (0,t_0]\) we have
Hence, for any \(t \in (0,{t_0}]\) we have
Inequality (6.12) with \(\lambda =0\) now follows by integrating in t. When \(n=2\) one uses the same calculation as above with the only difference that now \(q^*=2\) and by (6.11) we have
leading to (6.12) with \(\lambda =1/2\). \(\square \)
We will next combine (6.6) and (6.12) to conclude the proof of Proposition 6.2 via a Moser iteration argument.
Proof of Proposition 6.2
For the given numbers \(\rho _0 >1\) and \(t_0 \in (0,\tau ]\) and any numbers \(1/4< r< {{\bar{r}}}< 1/2\), we let \(\eta \in C_c (S_{t_0} \cap Q^{**}_{\rho _0,r_0})\) be the cutoff function given by (6.4)–(6.5). Clearly,
which includes the support of \(\eta \).
We first apply (6.12) to \(h:=\eta \, {{\bar{w}}}^\theta \in C^{1,0}(S_{t_0})\) to obtain
Notice that we have multiplied by \(\rho ^{-n}_0\) to make the inequality scaling invariant in space. For \(n \ge 3\) inequality (6.13) simply follows from (6.12), since \(\lambda =0\) and \(q=n/2\). When \(n=2\) we apply (6.12) with \(\lambda =1/2\) and \(q=2\) and use the fact that \(|M_t \cap \text{ supp } \, \eta | \le C\, \rho ^2_0\).
From Proposition 2.12 we have
since \(|F| \ge \rho _0/2\) on the support of \(\eta \). We next choose \(k=k(p) >1\) such that
Since \(\theta = (p+2)/2\) this means that \((p+2) (k-1)q = p\), hence \((k-1)q = p/(p+2) <1\) or \(k< (q+1)/q < q/(q-1):=q^*\). In addition \(k > 1+ p/(p+2)q \ge 1+1/(3q)\), since \(p \ge 1\). Summarizing, for future reference we have
with \(q, q^*\) as in Lemma 6.4. Thus, from (6.13) and (6.14) we obtain
To simplify the notation, set
and recall that from its definition \(\eta \equiv 1\) on \(Q^r_{\rho _0,t_0}\) and \(\eta \equiv 0\) outside \( Q^{{{\bar{r}}}}_{\rho _0,t_0}\). Also, set
Combining (6.6) and (6.16) yields
We will now iterate this inequality to obtain the desired \(L^\infty \) bound on \({{\bar{w}}}\). To this end, we define \(p_0, p_1, \ldots \) and \(\theta _0, \theta _1, \ldots \) by letting \(p_0=1\) and setting
We also define
Observe that under this notation \(Q_0=Q^*_{\rho _0,t_0}\) while \(\lim _{\nu \rightarrow \infty } Q_\nu =Q^{*}_{\rho _0, t_0}\). Also, set
It then follows from (6.17) that
with
Since \(q >1\), it follows from (6.19) that
with \( \lambda _\nu = (1+1/q) / k(p_\nu )\). Since \(\lim _{\nu \rightarrow \infty } p_\nu = +\infty \) we have \(\lim _{\nu \rightarrow \infty } k(p_\nu ) = 1+1/q\). It follows that
for some numbers \(1< E< E^* < \infty .\) Also, \(1< \bar{\lambda }_\nu < 1+ C\, E^{-\nu }.\) We conclude from the bounds above that
for some absolute constants \( \mu _0\) and \(\sigma _0\). Thus,
with \(2\theta _0=p_0+2=3\) and for some new positive absolute constants \(\mu _1\) and \(\sigma _1\). The constant C is independent of \(\rho _0\) and \(t_0\).
To finish the proof of the proposition it will be sufficient to estimate the integral on the right hand side of (6.21) in terms of
To this end, we set again \(B:= ({\bar{r}}-r)^{-2} \, t_0^{-1}\) and combine (6.13) with (6.6) and the bound (6.14), to obtain for \(\theta _0:=3/2\) the bound
If we choose \(k >1\) so that \(2\theta _0 (k-1)q =1\), the above bound yields
Setting,
follows from (6.22) that for any \(1/4< r< {\bar{r}} < 3/4\), we have
Using Hölder’s inequality we have
for any \( s \in (0,1)\) with \(\lambda =\frac{(1-s)k}{k-s}\). For \(\gamma >1\) and \(r \in [2/3,1]\), (6.24) shows that
since \(m(3r/4,q) \le m(3/4,q)\). Integrating in r with respect to dr/r on [2/3, 1] we find after a change of variable that
Now choose s so that \(2\theta _0 s = 1\) (recall that we have set \(\theta _0=3\)) and \(\gamma \) so close to 1 so that \(\gamma ^{-1} > \lambda /k\). If \(m(1/2,k) \le 1\), then since \(k >1\) we conclude that \(m(1/2,1) \le C\) and the bound \({\displaystyle \Vert {{\bar{w}}}\Vert _{L^\infty (Q_{\rho _0,t_0} \cap S_{t_0})} \le C}\) follows from (6.21). Otherwise, \(\log m(3r4,k) >0\) for \(r \in [2/3,1]\) and from (6.25) we obtain
which yields
or equivalently
Since, \(\iint _{Q_{\rho _0,t_0}^{**} \cap S_{t_0}} {{\bar{w}}}\, d\mu \, dt \le C\, I\), combining (6.26) with (6.21) yields the bound
for some new absolute constants \(\sigma >0\) and \(\mu >0\). The constant C is independent of \(r_0\) and \(\bar{t_0}\). Recalling that \({\bar{w}}=\max (w,1)\) we conclude (6.2). \(\square \)
Proposition 6.2 provides an \(L^\infty \) bound on \(w(\cdot , t)\) on \(M_t \cap \{ |F| \ge 2 \}\), \(0 < t \le \tau \). The next result gives an \(L^\infty \) bound on \(w(\cdot , t)\) on \(M_t \cap \{ |F| \le 1 \}\). For any given \(t_0 \in (0,\tau ]\) and \(r \in (0,1)\) we consider the parabolic cylinders in \({{\mathbb {R}}}^{n+1} \times (0,+\infty )\) given by
where \(B_r(0):= \{ \, \mathbf{x}\in {{\mathbb {R}}}^{n+1}: \, |\mathbf{x}| < r \}\) denotes the ball in \({{\mathbb {R}}}^{n+1}\) centered at the origin of radius r. We have the following estimate.
Proposition 6.5
Assume that \(M_t\) is a solution to (1.1) as in Theorem 4.3 defined for \(t \in (0,\tau ]\) and assume that \( \tau < T-3\delta \) with T given by (3.8) and \(\delta >0\). There exist absolute constants \(\mu >0\) and \(\sigma >0\) and a constant C that depends on \(\alpha _0, \kappa \), on \(\delta \), and the initial bound \(\sup _{M_0} {\langle F, \omega \rangle }\, H\), for which \(w:= {{\hat{\gamma }}}(t) \,({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\) satisfies the bound
which holds for any \(t_0 >0\) such that \(Q_{t_0} \cap S_{t_0}\) is not empty.
Proof
The proof is the very similar as the proof of Proposition 6.2. It is actually simpler as it doesn’t need to be scaled with respect to \(\rho _0\). \(\square \)
Proof of Theorem 6.1
Readily follows by combining the two estimates in Propositions 6.2 and 6.5. \(\square \)
We will next combine Theorems 5.4 and 6.1 to obtain the following \(L^\infty \) bound on w in terms of the initial data.
Theorem 6.6
\((L^\infty \) bound on w in terms of the initial data) Assume that \(M_t\) is a solution to (1.1) as in Theorem 4.3 defined for \(t \in (0,\tau )\), and assume that \( \tau < T-3\delta \) with \(T=T(\alpha _0)\) given by (3.8) and \(\delta >0\). Then, of any \(t_0 \in (0, \tau /2]\) there exists a constant \(C_\delta \big ( t_0, \alpha _0, \kappa , \sup _{M_0} w, \inf _{M_0} w \big )\) such that
Proof
We recall the definition of \({{\hat{w}}}:= (w-1)_+\), with \(w:= {{\hat{\gamma }}}(t) \, v^{-1} ={{\hat{\gamma }}}(t) \,({\langle {\hat{F}}, \nu \rangle }\, H)^{-1}\) and \({\hat{\gamma }}\) as defined at the beginning of this section. Since \({\langle {\hat{F}}, \nu \rangle }= -{\langle F, \omega \rangle }\, {\langle {\omega }, \nu \rangle }\) and \(-{\langle {\omega }, \nu \rangle }:= (\sqrt{1+ |D{\bar{u}}|^2})^{-1}\) satisfies \( (\sqrt{1+\alpha _0^2})^{-1} \le {\langle {\omega }, \nu \rangle }\le 1\), it follows that the assumed initial bound (1.8) and the definition of w imply the bound
for some positive constants \({\bar{c}}_0, {\bar{C}}_0\) depending on the constants \(c_0, C_0\) in (1.8) and \(\alpha _0, \hat{\gamma }_0:= {\hat{\gamma }}(0)\).
For any \(t_0 \in (0,\tau /2]\) we have that (6.1) holds. Hence, it is sufficient to bound the righthand side of (6.1) in terms of the initial data and \(t_0\). Since \(w \le {\hat{w}} +1\) and \({\hat{w}}\) is compactly supported for each \(t \in ({t_0}/4, \tau ]\) (the latter follows from (5.3) and the fact that \({\hat{\gamma }}(t) < \gamma (t)\)), we have
We next want to apply the \(L^{p+1}\) bound (5.12) for \(p=0\), to bound \(\sup _{t \in ({t_0}/4, \tau ]} \int _{M_t} {\hat{w}} (\cdot ,t)\, d\mu \) in terms of the initial data and \(t_0\). Notice that we cannot use (5.12) on the interval \([0,\tau ]\), as we have not assumed that (5.3) holds at \(t=0\) which would imply that \({\hat{w}} (\cdot , 0)\) is compactly supported. It holds only for \(t >0\) as a consequence of parabolic regularity (see Proposition 4.4). Thus, we first apply (5.12) on \((t_0/4,\tau ]\) to obtain
To conclude our proof we will bound \(\int _{M_{t_0/4}} {\hat{w}} (\cdot ,t_0/4)\, d\mu \) in terms of \(\sup _{M_0 } w\) and the size of the support of \({\hat{w}} (\cdot , t_0/4)\). Let us first bound \(\sup _{M_{t_0/4} } w\) in terms of \(\sup _{M_0 } w\). We will do that for \(t_0/4 \le \tau _0\), for a \(\tau _0 >0\) depending only on the initial data. This is sufficient since \(t_0\) in (6.29) can be chosen small. To this end, we will use the maximum principle on w to equation (5.4). Indeed, setting \(m(t):= \sup _{M_t} w\), a straightforward application of the maximum principle on equation (5.4), using also the facts that \({\langle {\omega }, \nu \rangle }\le 1\), \(c_1 <0\) and \(\gamma ^{-1} (t) \le \gamma ^{-1} (\tau _0)\) on \([0, \tau _0]\), gives that
yielding
If \(\tau _0\) is sufficiently small such that \({\hat{\gamma }}_0/2 \le {\hat{\gamma }}(\tau _0) \le {\hat{\gamma }}_0\), we conclude that
By decreasing \(\tau _0\) is necessary we may assume that \(\hat{\gamma }_0 - 4 m(0)\, \tau _0 \ge {\hat{\gamma }}_0/2\). We conclude using also (6.30) that for such a \(\tau _0\) we have
Since we may assume without loss of generality that \(t_0/4 \le \tau _0\), the last bound and \({\hat{w}} \le w\) imply that \(\sup _{M_{t_0/4} } {\hat{w}} \le 2 {\bar{C}}_0.\) On the other hand, by (5.3) and the fact that \({\hat{\gamma }} (t) < \gamma (t)\), we have that \({\hat{w}}:= (w-1)_+\) is compactly supported for all \( t \in (0, \tau )\) and in particular for \(t:=t_0/4\). This means that its support is contained in a ball in \({{\mathbb {R}}}^{n+1}\) of radius \(R_0:=R_0(t_0)\). Hence,
Finally, by combining (6.1) with (6.31), (6.32) and (6.34) we conclude that (6.29) holds. \(\square \)
7 Long time existence Theorem 1.1
In this final section we will give the proof of our long time existence Theorem 1.1, which says that our solution \(M_t\) of the inverse mean curvature flow will exist up to time T, where T denotes the critical time where the cone at infinity becomes flat and is given by (3.8).
Proof of Theorem 1.1
Our short time existence Theorem 4.3 implies the existence of a maximal time \(\tau _{\max } >0\) for which a convex solution \(M_t\) of (1.1) exists on \([0,\tau _{\max })\) and the following hold:
-
i.
\(M_t\), \(t \in [0,\tau _{\max })\) is an entire convex graph \(x_{n+1} = {{\bar{u}}}(x,t)\) over \({{\mathbb {R}}}^n\) which satisfies condition (1.7);
-
ii.
\({{\bar{u}}}\) is \(C^\infty \) smooth on \({{\mathbb {R}}}^n \times (0,\tau _{\max })\);
-
iii.
\( c_{\tau _1} < H \, {\langle F, \omega \rangle }\le C_0\), on \(t \in [0,\tau _1]\), for all \(0< \tau _1 < \tau _{\max }\).
It \(\tau _{\max } =T\), we are done, otherwise \(\tau _{\max } < T-\delta \), for some \(\delta >0\). We claim that
To this end, we will combine (6.29) with (6.33). We have seen in the proof of Theorem 6.6 that there exists \(\tau _0 >0\) depending only on the initial data such that (6.33) holds. Assume without loss of generality that \(\tau _0 < T/2\). Since \(w:= {\hat{\gamma }}(t) (H\, {\langle {\hat{F}}, \nu \rangle })^{-1}\), it follows from (6.33) that
Now we apply (6.29) for \(t_0:=\tau _0\) and \(\tau :=\tau _{\max }\) to obtain the bound
This can be done since conditions i.–iii. above imply that Theorem 6.6 holds on \((0, \tau _{\max })\). It follows that
Combining the last two bounds yields that (7.1) holds and since \({\langle {\hat{F}}, \nu \rangle }= - {\langle F, \omega \rangle }\, {\langle {\omega }, \nu \rangle }\le {\langle F, \omega \rangle }\) we also have
In addition, by Proposition 2.12 we have
On the other hand, \({{\bar{u}}}_t \le 0\) and (1.7) imply that the pointwise limit \({{\bar{u}}}(x,\tau _{\max }) := \lim _{t \rightarrow \tau _{\max }} {{\bar{u}}}(x,t)\) exists for all \(x \in {{\mathbb {R}}}^n\) and it defines a convex graph. Moreover, it satisfies (1.7) at \(t=\tau _{\max }\). Now the lower and upper bounds (7.1), (7.3) and (1.7) for \(t \in [0,\tau _{\max }]\), imply that the fully-nonlinear equation (1.4) satisfied by \({{\bar{u}}}\) is strictly parabolic on compact subsets of \({{\mathbb {R}}}^n \times [0,\tau _{\max }]\). It follows by standard local regularity results on fully-nonlinear equations that \({{\bar{u}}}(\cdot ,\tau _{\max })\) is \(C^\infty \) smooth. Moreover, the above bounds show that \(c_\delta \le H\, {\langle F, \omega \rangle }\le C_0\) on \(M_{\tau _{\max }}\). Also, since \(|{\langle F, \nu \rangle }| \le C_0\) on \(M_0\) (see in (4.15)) its evolution equation given in Lemma 2.1 and convexity imply the bound \(|{\langle F, \nu \rangle }| \le C(T)\) on \(M_{\tau _{\max }}\). We conclude from the above discussion that at time \(t=\tau _{\max }\) the entire graph \(M_{\tau _{\max }}\) given by \(x_{n+1} = {{\bar{u}}}(\cdot , \tau _{\max })\) satisfies all the assumptions of our short time existence result Theorem 4.3, hence the flow can be extended beyond \(\tau _{\max }\) contradicting its maximality. This shows that \(\tau _{\max } = T\), showing that our solution exists for all \(t \in (0,T)\).
Let us now observe that as \(t \rightarrow T\), the solution converges to a horizontal plane of height \(h \in [0,\kappa ]\). First, the pointwise limit \({{\bar{u}}}(x,T):= \lim _{t \rightarrow T} {{\bar{u}}}(x,t)\) exists, since \({{\bar{u}}}_t(x,t) \ge 0\) for all \(t <T\). Second, \({{\bar{u}}}(\cdot ,T)\) is convex and lies between the two horizontal planes \(x_{n+1}=0\) and \(x_{n+1}=\kappa \). The latter simply follows from (1.7) and the fact that \(\alpha (T)=0\). In addition, our a’priori local bound from above on the mean curvature H shown in Proposition 2.11, which holds uniformly up to \(t=T\), implies that \({{\bar{u}}}(\cdot ,T) \in C^{1,1}_{{\text{ l }oc}}({{\mathbb {R}}}^n)\). It follows that \({{\bar{u}}}(\cdot ,T)\) must be a horizontal plane of height \(h \in [0,\kappa ]\), and that the convergence \(\lim _{t \rightarrow T} {{\bar{u}}}(\cdot ,t) \equiv h\) is in \(C^{1,\alpha }\), on any compact subset of \({{\mathbb {R}}}^n\) and for all \(\alpha < 1\).\(\square \)
References
Alessandroni, R., Sinestrari, C.: Evolution of convex entire graphs by curvature flows. Geom. Flows 1, 111–125 (2015)
Carron, G.: Inégalités de Hardy sur les variétés riemanniennes non-compactes. J. Math. Pures Appl. 76, 883–891 (1997)
Choi, K., Daskalopoulos, P.: The \( Q^k\) flow on complete non compact graphs, arXiv: 1603.03453
Choi, K., Daskalopoulos, P., Kim, L., Lee, L.: The evolution of complete non-compact graphs by powers of Gauss curvature, arXiv: 1603.04286
Dahlberg, B.E.J., Kenig, C.E.: Nonnegative solutions to the porous medium equation. Commun. Part. Differ. Equ. 9, 409–437 (1984)
Daskalopoulos, P., Huisken, G., King, J.R.: Self-similar entire convex solutions to the inverse mean curvature flow, private communication
Daskalopoulos, P., Kenig, C.: Degenerate Diffusions: Initial Value Problems and Local Regularity Theory, EMS Tracts in Mathematics, 1. European Mathematical Society (EMS), Zürich (2007)
Ecker, K., Huisken, G.: Mean curvature evolution of entire graphs. Ann. Math. 130, 453–471 (1989)
Ecker, K., Huisken, G.: Interior estimates for hypersurfaces moving by mean curvature. Invent. Math. 105, 547–569 (1991)
Franzen, M.: Existence of convex entire graphs evolving by powers of the mean curvature, preprint (2011) arXiv:1112.4359
Halldorsson, H.P.: Self-similar solutions to the curve shortening flow. Trans. Am. Math. Soc. 364(10), 5285–5309 (2012)
Gerhardt, C.: Flow of nonconvex hypersurfaces into spheres. J. Differ. Geom. 32, 299–314 (1990)
Heidusch, M.E.: Zur Regularität des inversen mittleren Krümmungsflusses, Dissertation Tübingen Univ. (2001)
Holland, J.: Interior estimates for hypersurfaces evolving by their k-th Weingarten curvature and some applications. Indiana Univ. Math. J. 63, 1281–1310 (2014)
Huisken, G., Ilmanen, T.: The Riemannian Penrose inequality. Int. Math. Res. Not. 20, 1045–1058 (1997)
Huisken, G., Ilmanen, T.: The inverse mean curvature flow and the Riemannian Penrose inequality. J. Differ. Geom. 59, 353–438 (2001)
Huisken, G., Ilmanen, T.: Higher regularity of the inverse mean curvature flow. J. Differ. Geom. 80, 433–451 (2008)
Kombe, I., Özaydin, M.: Improved Hardy and Rellich inequalities on Riemannian manifolds. Trans. Am. Math. Soc. 361, 6191–6203 (2009)
Krylov, N.V.: Nonlinear Elliptic and Parabolic Equations of the Second Order. Reidel, Dordrecht (1987)
Smoczyk, K.: Remarks on the inverse mean curvature flow. Asian J. Math. 4, 331–335 (2000)
Tian, G., Wang, X.-J.: A priori estimates for fully nonlinear parabolic equations. Int. Math. Res. Not 2013, 3857–3877 (2013)
Urbas, J.: On the expansion of strashaped hypersurfaces by symmetric functions of their principal curvatures. Math. Z. 205, 355–372 (1990)
Acknowledgements
P. Daskalopoulos has been partially supported by NSF Grant DMS-1600658. She also wishes to thank University of Tübingen and Oberwolfach Research Institute for Mathematics for their hospitality during the preparation of this work. G. Huisken wishes to thank Columbia University and the Institute for Theoretical Studies ITS at ETH Zürich for their hospitality during the preparation of this work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by L. Ambrosio.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
