
Abstract
In this paper, for the operations of wastewater treatment processes (WWTPs), an intelligent multi-objective optimization control (IMOOC), based on an adaptive multi-objective differential evolution (AMODE) algorithm, is proposed to search for the suitable set-points to balance the treatment performance and the operational costs. In this IMOOC, the combination of an AMODE algorithm and the multi-objective critical issues helps us to fulfill all the control objectives simultaneously. To improve the optimization efficiency and achieve fast convergence, the AMODE algorithm is designed to improve the local search and the global exploration abilities: The adaptive adjustment strategies are developed to select the suitable scaling factor and crossover rate in the process of searching. Meanwhile, the multi-objective critical issues, according to the state of the processes, are given as a nonlinear multi-objective optimization problem to evaluate the operational performance of WWTPs. Therefore, once the nonlinear multi-objective optimization problem is solved at each sampling time, the most appropriate set of Pareto is selected as suitable set-points to achieve the process performance. To demonstrate the merits of our proposed method, the proposed IMOOC is applied to the Benchmark Simulation Model No. 1 of WWTPs. The results show that the proposed IMOOC effectively provides process control. The performance comparison with other algorithms also indicates that the proposed optimal strategy yields better effluent qualities and lower average operation consumption.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Water is an essential raw material for the human security and river biodiversity [1]. Environmental protection and water management have been studied for many years, especially in areas where clean water is scarce. However, rapid urbanization and industrialization led to unhealthy environments and widespread wastewater. In response, research was undertaken which led to the development of wastewater treatment technologies [2,3,4]. The activated sludge process, one of the most remarkable engineering inventions in the twentieth century, has made significant contribution to wastewater reclamation in the past 100 years [5, 6]. Activated sludge is a mixture of inert solids from wastewater combined with a microbial population growing on the biodegradable substrates present in the wastewater. However, for the wastewater treatment processes (WWTPs), the cost of energy is increasing when effluent limitations are becoming lower. The activated sludge-based WWTPs around the world are facing technical and financial challenges to meet ever more stringent effluent water quality standards [7,8,9].
To satisfy effluent water quality standards with reasonable economic expenses, many different innovative control technologies have been applied to single or multiple variables in WWTPs. The major goals of the controllers are to keep the plant running, satisfy the effluent requirements, and minimize operating costs [10, 11]. For example, Shen et al. implemented the MPC strategy with the Benchmark Simulation Model No.1 (BSM1) for WWTPs [12]. Acceptable performance is obtained by combining the feedforward controllers and taking into consideration the influent ammonium concentration and the flow rate, while, in some case in which the influent ammonium concentration is not measured, its estimation requires an observer. O’Brien et al. investigated a case study application of MPC in which the technique was used in a WWTP in Lancaster. The MPC system provided significant benefits, including a reduction of more than 25% in power usage and a similar increase in plant efficiency. Moreover, a generalized predictive control (GPC) technique was introduced to regulate the activated sludge process found in a bioreactor used in WWTPs, and this control strategy can track dissolved oxygen set-point changes quickly, adapting to the system uncertainties and disturbances [13]. However, for the former controllers [12,13,14], the closed-loop behaviors of WWTP differ with respect to their objectives and methods. These controllers pay attention to individual variables and feature the system by a single objective function. In fact, evaluating strategies for WWTPs does not just relate to one single objective, rather, it involves several objectives, such as effluent quality, operation cost, as well as the stability of the strategies [15]. Obviously, these objectives must be considered simultaneously in the design and control process for WWTPs [16, 17].
Regarding the multi-objective optimization of the operation of WWTPs, there has been an explosion of innovative control technologies to achieve high levels of treatment performance. Cadet et al. used a simple L/A control law for WWTPs [18], and its switch has been realized by fuzzy logic. The results are as expected with an improvement of nitrogen removal. But in this case the cost will be increased, and the control actions will behave relatively ineffectively. Guerrero et al. adopted a model-based set-point optimization to improve the performance of control system in WWTP. Set-points were optimized to provide low effluent N and P discharges with minimal cost. The control system made for a decrease in cost up to 45% with respect to the open-loop scenario [19]. Stare et al. introduced several control strategies for nitrogen removal which are proposed and evaluated in a benchmark simulation model of an activated sludge process [20]. Results of the simulation show that with Proportional–Integral (PI) and feedforward controllers almost the same operating costs can be achieved as with MPC strategies under various plant operating conditions. However, MPC strategies are advantageous only in cases where the plant is highly loaded and if stringent effluent fines are imposed by legislation, and there are other multi-objective control approaches for WWTPs [21, 22]. What is more, the former controllers [19,20,21,22] weight the individual objectives so that a single objective function is formed by combining the individual objectives. This way of approaching the multi-objective problem for WWTP is not the best manner of solving such problems because assigned weights are subjective [23, 24]. To control WWTPs as a multi-objective problem from a process control point of view, Francisco et al. introduced a dynamic analysis of the closed-loop control of these variables considering a nonlinear model predictive controller (NMPC) and a particular distributed NMPC-PI control structure. This research provides the optimum strategy of measurements to keep constant with minimum economic loss [25]. In [26], a multi-objective evolutionary algorithm, non-dominated sorting genetic algorithm (NSGA-II), is used to derive sets of Pareto optimal operational and control parameter values for WWTPs, with objectives including minimization of greenhouse gas emissions, operational costs and effluent pollutant concentrations, subject to legislative compliance. This multi-objective optimal control method can facilitate a significant reduction in greenhouse gas emissions without the need for plant redesign or modification of the control strategy layout. And some other multi-objective optimal control methods for WWTPs can be found in [27,28,29]. However, in general, how to design a suitable multi-objective optimal control method to address the multiple conflicting criteria (i.e., effluent quality, operation cost, operation stability), including studying the ASP models that are primarily responsible for the process, is still a challenge [30,31,32].
Motivated by the above analysis, to design an efficient multi-objective optimal control method for WWTPs, an intelligent multi-objective optimization scheme (IMOOS), based on an adaptive multi-objective differential evolution (AMODE) algorithm, is proposed to search for the suitable set-points to balance the treatment performance and the operational costs. In this IMOOS, the combination of an AMODE algorithm and the multi-objective critical issues helps us to fulfill all the specified control objectives simultaneously. To improve the optimization efficiency and achieve fast convergence, the AMODE algorithm is designed to improve the local search and the global exploration abilities: The adaptive adjustment strategies are developed to select the suitable scaling factor and crossover rate in the searching process. Meanwhile, the multi-objective critical issues, according to the state of the processes, are given as a nonlinear multi-objective optimization problem to evaluate the operational performance of WWTPs. Therefore, once the nonlinear multi-objective optimization problem is solved at each sampling time, the most appropriate set of Pareto, based on the adaptive non-dominated sorting strategy, is selected as the suitable set-points to achieve the process performance. To demonstrate the merits of our proposed method, the IMOOS algorithm is applied to BSM1. The results show that IMOOS effectively provides process control. The performance comparison also indicates that the proposed optimal strategy yields better effluent qualities as well as lower average operation consumption.
The remainder of this paper is organized as follows. After briefly introducing BSM1 and the evaluation criteria in Sect. 2, the proposed multi-objective optimization control is developed in details in Sect. 3. Then, the simulation results and discussion are shown in Sect. 4. The performance of IMOOC is compared with several other methods. The simulation results demonstrate that IMOOC is a more effective controller: It can ensure that the water quality meets the expected level and has lower average operation consumption. Finally, Sect. 5 gives some conclusions.
2 Description of WWTPs
WWTPs aim to achieve, at minimum costs, a sufficiently low concentration of biodegradable matter in the effluent together with minimal sludge production. To do this, the process has to be controlled. However, WWTPs are nonlinear systems subject to large perturbations in influent flow rate, together with uncertainties concerning the composition of the incoming wastewater. In this paper, to develop alternative controller, the modeled WWTP is based on the BSM1 plant. BSM1 plant is a simulation environment defining a plant layout, a simulation model, influent loads, test procedures, and evaluation criteria.
2.1 Description of BSM1
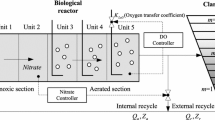
The layout of BSM1, as shown in Fig. 1, consists of a primary clarifier, an activated sludge reactor containing two tanks which may be operated under anoxic condition, followed by three aerobic tanks in series, a secondary settler, and a sludge thickener.

General overview of the BSM1 plant
Each anoxic tank has a volume of 1000 m3 and each aerobic tank volume of 1333 m3. Both anoxic tank and aerobic tank are modeled using a version of the Activated Sludge Model No.1. The complete benchmark model is summarized by the following equations.
For l = 1 (Unit 1)
where Q1 = Qa + Qr + Qo, Qa is the internal recycle flow rate, Qr is the external recycle flow rate, Qo is the influent flow rate, Z1, Z5, Zr, Zo are, respectively, the component concentrations of zone 1, zone 5, external recycle, and the initial concentration of influent, V1 is the volume of zone 1, r1 is the component reaction rate in zone 1.
For l = 2–5 (Unit 2–5)
where Ql = Ql − 1, Zl − 1 is the component concentration of l − 1th zone, Vl is the volume of lth zone.
The secondary settler is modeled as a 10-layer unit which has no biological reaction. The height of each layer is equal to 0.4 m. The settler has an area of 1500 m2. And the feed layer is the sixth layer counting from bottom to top.
The solid flux is Js = vs(X)X. A double-exponential settling velocity function is
where X is the total sludge concentration, v ′0 is the maximum settling velocity, v0 is the maximum settling velocity, rh is the hindered zone settling parameter, rp is the flocculant zone settling parameter, Xmin = fns Xf, and Xf is the sludge concentration from the concentrations in compartment 5 of the activated sludge reactor. v ′0 = 250 m d−1, v0 = 474 m d−1, rh = 0.000576 m3 (g SS)−1, rp = 0.00286 m3 (g SS)−1, fns = 0.00228.
2.2 Evaluation criteria
There are three weather influents including dry weather, rainy weather, and storm weather. Each influent contained 14 days data with a sample time of 15 min. To derive an objective view of the performance of the control strategy, three criteria have been determined to be useful in assessing the performance of the plant: aeration energy (AE), pumping energy (PE) and effluent quality (EQ). AE was calculated for the last 7 days of dynamic data. AE consumption is described as in [15]:
where KLal(t) is the overall mass transfer coefficient in the lth unit and Vl is the volume of the lth unit, KLal(t) = 0 to 10 h−1, l = 3, 4, 5. In this case, a rough estimate of average electricity price in the EU (0.1 €/kWh) was taken into account, and thus, all of the weights were multiplied by 0.1.
PE depends on how the various tanks can be arranged on the available space and given as:
where T = 7 is the period of observation, Qa(t) = 55,338 m3/d is the internal recirculation flow rate, Qr(t) is the return sludge flow rate, Qw(t) is the wastage flow rate, and with the flow rates expressed in m3d−1.
Moreover, EQ means levies or fines are to be paid due to the discharge of pollution in the receiving water bodies and given as:
where SSe(t) is the suspended solid concentration, CODe(t) is the chemical oxygen demand, SNkj,e(t) is the total nitrogen concentration, SNO,e(t) is the nitrate and nitrite nitrogen, BODe(t) is the biochemical oxygen demand of 5 days, and Qe(t) is the effluent flow rate.
In the majority of the existing work about the evaluation of control strategies, the definitions used to characterize AE, PE, and EQ in WWTPs are the standard performance in the BSM1 platform. However, the balance between treatment performance (EQ) and the cost (AE and PE) becomes a critical issue for the operations of WWTPs. Thus, to optimize the operation consumption of a WWTP, beyond the evaluation criteria carrying out specific tasks at different conditions, the operational optimization of WWTPs is recommended to achieve the optimal set-points.
3 Multi-objective optimization control based on AMODE
The problem of determining the optimal set-points of the DO concentration in the fifth tank (SO5) and the nitrogen nitrate concentration in the second anoxic tank (SNO2) to control WWTPs has traditionally been solved by using constrained optimization or applying artificial intelligence techniques. The economic profit has been used as the main criterion in most research on optimization to obtain adequate control set-points of SO5 and SNO2 for controlling WWTPs.
This paper addresses the problem of optimal control by a hierarchical control architecture governed by a high-level multi-objective optimization approach. In this study, the proposed multi-objective optimization control consists of two levels. The super-structure is in charge of determining the optimal set-points, as well as the substructure is a PI controller, which is used to trace the optimal set-points of SO5 and SNO2.
3.1 Multi-objective optimization control architecture
The dynamics involved in WWTPs present different objectives as described above [Eqs. (4)–(6)]. Optimal aeration policies in WWTPs have shown great potential toward increasing process efficiency. Hence, a hierarchical multi-objective optimization control architecture has been developed (see Fig. 2). This control framework aims to determine and trace the optimal set-points of SO5 and SNO2 which minimize both the energy required for aeration and the effluent quality indexes.

Multi-objective optimization control architecture
In this hierarchical multi-objective optimization control, the architecture used in this paper has two layers (see Fig. 2). The upper layer solves the optimization problem defined in Sect. 2 which are given by the three objectives Eqs. (4)–(6). The outputs of this layer are the optimal set-points of SO5 and SNO2. Then, the lower layer has the controllers to minimize the error between the optimal set-points calculated by the upper layers and the measured variables in the process.
3.2 Adaptive multi-objective differential evolution (AMODE) algorithm
In WWTPs, the balance between the treatment performance and the cost becomes a critical issue for the operations, which necessitates a multi-objective optimization. Recent studies in this field have shown promise in utilizing multi-objective optimization (MOO) algorithm to address the multiple conflicting criteria (i.e., effluent quality, operation cost and operation stability). In this study, the optimal control strategy is carried out using an AMODE algorithm, since multi-objective differential evolution (MODE) is computationally fast and has been shown to provide better coverage and maintain a better spread of solutions than other multi-objective evolutionary algorithms [33]. Meanwhile, the multi-objective optimization problem presented in this work is composed of the previous objective functions described as
subject to
where u(t) = [u1(t), u2(t)]T represents the set-points of SO5 and SNO2, 0 < u1(t) < 2.5 g (− COD) m−3, 0 < u2(t) < 2.5 g N m−3.
In this AMODE algorithm, the population is U(t) = [U1 (t), U2 (t)]T, U1 (t) = [U11(t), U12(t), …, U1Np(t)] and U2(t) = [U21(t), U22(t), …, U2Np(t)] are the DO concentration and the nitrogen nitrate concentration at time t, respectively; Np is the population size. The initial value of U(t) is random value. Some novel methods are designed in order to improve the local search and the global exploration abilities. In the multi-objective differential evolution algorithm, the suitable scaling factor and crossover rate can be calculated in the mutation and crossover processes to balance the local search and the global exploration abilities. Meanwhile, in the proposed AMODE algorithm, the scaling factor F is used to enlarge or reduce the difference vector in the evolution process. The dynamic adjustment strategy of the scaling factor can be expressed as:
where
where Fi(t) and Fi(t − 1) are the scaling factor of the ith element at time t and t − 1, i = 1, 2, β = 1, 2, …, Np, μH(t − 1) and μL(t − 1) are the highest and lowest bounds of the scaling factor at time t − 1, respectively; \(f_{i}^{\prime } (t - 1)\) and \(f_{i}^{\prime\prime} (t - 1)\) are the average fitness of low-level and high-level in non-dominated solutions for the ith element at time t − 1.
In the process of mutation, the donor variable U ′ iβ (t) can be described as:
where Uir1(t) and Uir2(t) are the random values of the ith element from the population at time t.
Moreover, a crossover operation takes play after mutation. Since the crossover rate is considered as a key fact for the search ability and convergence in the evolution process [34], in the proposed AMODE algorithm, the update process of crossover rate is designed:
where Cri(t) and Cri(t − 1) are the crossover rate of the ith element at time t and t − 1, ρH(t − 1) and ρL(t − 1) are the highest and lowest bounds of the crossover rate at time t − 1, respectively.
In the process of crossover, the trial variable \(\bar{U}_{i\beta } (t)\) is generated by exchanging the components of donor variable with target variable. The crossover uses the method of binomial. The scheme can be described as:
There are Np target variables and Np trial variables for Ui(t), U(t) is updated by non-dominated sorting strategy. The most appropriate set of Pareto is selected as u(t).
Remark 1
In this AMODE algorithm, the scaling factor and the crossover rate can be adjusted according to the evolutionary process. The proposed AMODE algorithm differs from the classical differential evolution algorithms in the following aspects: Firstly, the adaptive scaling factor strategy is utilized to enhance both convergence and diversity. Secondly, the adaptive crossover rate mechanism is considered to make the AMODE algorithm effective, ensuring the population has a good convergence in the evaluation process.
3.3 Intelligent multi-objective optimization control (IMOOC)
The aim of the proposed multi-objective optimization control is to minimize the energy consumption and meet the quality standards for WWTPs. In IMOOC design, the performance index is used to adjust the properties of the closed-loop system. In general, the AMODE algorithm is used to obtain the optimal set-points for controlling WWTPs. Then, a PI control method [18] is applied to trace the optimal set-points of SO5 and SNO2 for improving the control performance. In order to reveal the proposed control strategy clearly, the proposed IMOOC is summarized in Table 1, which is executed at time t. The sampling time of u(t) is 15 min as same as the interval of original influent data.
In this control strategy, the AMODE algorithm is used to handle multiple objectives for the IMOOC algorithm. The key idea is to minimize the objective functions by obtaining and tracing the optimal set-points of SO5 and SNO2. Some remarks should be noted, and in the following section the performance of the proposed IMOOC is discussed.
Remark 2
The optimization of WWTPs is a complex activity because several objectives must be taken into account simultaneously, i.e., the optimization of the alternatives is a multi-criteria problem. In IMOOC, the AMODE algorithm is used to achieve the optimization of the energy required for aeration and the effluent quality indexes. Then, the PI control method is investigated for tracing the optimal set-points of SO5 and SNO2. This method is able to maintain a good performance since it considers both the multi-objective optimization and trace control method among the control process in BSM1. This method and simulation results have a great value for the real implementation of the methodology.
4 Simulation results and discussion
The aim of this section is to evaluate the proposed IMOOC algorithm for optimal controlling DO and nitrate levels in WWTPs. In the following experiment, the optimal set-points of SO5 and SNO2 are firstly obtained by the AMODE algorithm. After obtaining the optimal set-points of SO5 and SNO2 by using the proposed AMODE algorithm, the PI control is applied to trace the optimal set-points by adjusting the oxygen transfer coefficient of the same tank (KLa5) and the internal recycle flow rate (Qa). Then, the proposed IMOOC algorithm is evaluated and compared against several other controllers. All the simulations were programmed with MATLAB version 2010 and were run on a PC with a clock speed of 2.6 GHz and 4 GB RAM, in a Microsoft Windows 8.0 environment. The experiment also shows the effect of set-points changes and load disturbances on the control systems.
4.1 System conditions
The system conditions of WWTPs are described as follows.
Samples To get an objective view of the applied control strategy performance in different situations, the simulated influent data are available in 2-week files derived from BSM1 database. These files are generated to simulate three different weather situations (see Fig. 3).

Influent flow rates. a Dry weather, b rain weather, c storm weather
Bounds The limits on the effluents—ammonium concentration (SNH), total nitrogen concentration (Ntot), biological oxygen demand (BOD5), chemical oxygen demand (COD), and suspended solid concentration (TSS), are shown in Eq. (9).
Control loop The control loop tracks the optimal set-points of SNO2 and SO5 by adjusting KLa5 (0 < KLa5 < 242 d−1) and Qa (0 < Qa <100,000 m3 d−1) according to the description of BSM1. Moreover, Kp = 10 and Ki = 2.
Disturbances To derive the robustness of the proposed control strategy, the measurable disturbances have been considered: the influent flow rate Qo and the influent ammonium concentration NHo in the time interval [0, 72] hour. And the amplitude of the disturbances occurs after t = 72 h (twice of Qo and three times of NHo).
4.2 Control results
4.2.1 Optimizing results
To verify the performance of the described strategy for optimal controlling WWTP, the AMODE algorithm is proposed for optimizing the DO concentration and the nitrogen nitrate concentration. The initial parameters of the AMODE algorithm are: Fi(0) = 0.5, Cr(0) = 0.2, the population size is 50, and the maximum number of iterations is 200. The performance of the optimal results using the AMODE algorithm is presented in Figs. 4, 5, and 6.

Optimal results in dry weather. a The set-points of SO5, b the set-points of SNO2

Optimal results in rainy weather. a The set-points of SO5, b the set-points of SNO2

Optimal results in storm weather. a The set-points of SO5, b the set-points of SNO2
From these figures, the AMODE algorithm is able to obtain the solutions for optimizing the DO concentration and the nitrogen nitrate concentration in three conditions—dry weather, rainy weather and storm weather. Moreover, these results also highlight the importance of considering the multi-objective functions on the energy required for aeration and the effluent quality when developing control strategies. The set-points of SNO2 and SO5 are based on the balance among AE, PE, and EQ which often conflict with each other and should be considered simultaneously.
4.2.2 Tracing control results
In the following experiment, after obtaining the optimal set-points of SO5 and SNO2 using the proposed AMODE algorithm in the previous sections, the PI controller is applied to trace the optimal set-points. The performance of the tracing results using the PI controller is presented in Figs. 7, 8, and 9. And the results of KLa5 and Qa are shown in Figs. 10, 11, and 12.

Tracing results in dry weather. a The tracing results of SO5, b the tracing results of SNO2

Tracing results in rainy weather. a The tracing results of SO5, b the tracing results of SNO2

Tracing results in storm weather. a The tracing results of SO5, b the tracing results of SNO2

Results of KLa5 and Qa in dry weather. a The values of KLa5, b the values of Qa

Results of KLa5 and Qa in rainy weather. a The values of KLa5, b the values of Qa

Results of KLa5 and Qa in storm weather. a The values of KLa5, b the values of Qa
As it is clearly shown in Figs. 7, 8, and 9, acceptable tracking precision is achieved. In addition, changes in the different conditions do not have an impact on the tracking accuracy. Moreover, based on the results in Figs. 10, 11, and 12, the proposed IMOOC strategy is able to trace the SO5 and SNO2 in BSM1.
4.3 Analysis of the simulation results
In order to demonstrate the performance of the IMOOC strategy, the effluent qualities of IMOOC in three different conditions are displayed in Fig. 13. The measurable disturbances have been considered in BSM1, the numerical simulations reveal that the proposed control strategy gives satisfactory tracking performance for WWTPs. Moreover, to determine the control abilities of IMOOC, the details of the effluent qualities are shown in Tables 2, 3 and 4. The results in Tables 2, 3, and 4 show that, for the three different conditions, the proposed IMOOC algorithm can ensure the effluent quality indexes within the effluent limitations in BSM1.

Effluent qualities of IMOOC in different weather. a Dry weather, b rain weather, c storm weather
For the sake of comparison, four other controllers have been designed for the treatment process: the L/A control law [18], the intelligent multi-objective nonlinear model predictive control (iMO-NMPC) [27], the virtual reference feedback tuning (VRFT) [31], and the NSGA+PI [26]. To ensure a fair comparison, the optimal parameters of the controllers are the same as in the initial papers. The details of the comparisons are shown in Tables 5, 6 and 7. The AE consumption used is AE = 724 €/d in the open-loop control condition as in [13] and [20].
As Table 5 indicates, a lower PE value is achieved with the proposed IMOOC algorithm [71.4 (− 8.6%)]. The best EQ [6048.25 (− 1.10%)] is achieved when the proposed IMOOC algorithm is employed in the dry weather case. Meanwhile, Tables 6 and 7 illustrate the details of the different algorithms in both rainy and storm weather. These results show that the proposed IMOOC algorithm can control the SO5 and SNO2 in WWTPs with better performance. The best PE and EQ are achieved by IMOOC. The proposed IMOOC algorithm also yields better AE than the MODE+PI, the L/A control law, the VRFT, and the NSGA+PI.
5 Conclusion
The aim of this paper is to design an IMOOC algorithm for optimizing and controlling DO concentration and the nitrogen nitrate concentration in WWTPs. The performance is evaluated using environmental, economic and technical criteria. The present results conclude that the performance of WWTPs can be improved using the proposed IMOOC algorithm. The key findings of this study can be summarized in the following points:
-
(1)
One of the key factors of the IMOOC algorithm is to find the optimal set-points of SO5 and SNO2 for the plant. In our case, the AMODE algorithm is proposed using the adaptive adjustment strategies to select the suitable scaling factor and crossover rate in the searching process. Moreover, the AMODE algorithm developed in this research is shown to yield more performance than the other multi-objective algorithms.
-
(2)
Another key factor of the IMOOC algorithm is to solve the multi-objective optimal solutions for both effluent qualities and operation consumption. The proposed IMOOC algorithm provides a framework for optimal control with the AMODE algorithm. AMODE algorithm can handle multiple objectives for IMOOC.
-
(3)
This simulation study can be seen as an essential step before implementing the methodology in a real plant, since the generation of data was done as realistically as possible. This is very important and in fact can improve the robustness of the real WWTPs.
References
Petrie B, Barden R, Kasprzyk-Hordern B (2015) A review on emerging contaminants in wastewaters and the environment: current knowledge, understudied areas and recommendations for future monitoring. Water Res 72(1):3–27
Bayram A, Kankal M, Tayfur G, Önsoy H (2014) Prediction of suspended sediment concentration from water quality variables. Neural Comput Appl. doi:10.1007/s00521-012-1333-3
Prasse C, Stalter D, Schulte-Oehlmann U, Oehlmann J, Ternes TA (2015) Spoilt for choice: a critical review on the chemical and biological assessment of current wastewater treatment technologies. Water Res 87(1):237–270
Guerrero J, Guisasola A, Comas J, Rodriguez-Roda I, Baeza JA (2012) Multi-criteria selection of optimum WWTP control setpoints based on microbiology-related failures, effluent quality and operating costs. Chem Eng J 188(1):23–29
Najah AA, El-Shafie A, Karim OA, Jaafar O (2012) Water quality prediction model utilizing integrated wavelet-ANFIS model with cross-validation. Neural Comput Appl. doi:10.1007/s00521-010-0486-1
Jin L, Zhang G, Tian H (2014) Current state of sewage treatment in china. Water Res 66(1):85–98
Han H, Qiao J (2014) Nonlinear model-predictive control for industrial processes: an application to wastewater treatment process. IEEE Trans Industr Electron 61(4):1970–1982
Hameed M, Sharqi SS, Yaseen ZM, Afan HA, Hussain A, Elshafie A (2016) Application of artificial intelligence (AI) techniques in water quality index prediction: a case study in tropical region. Neural Comput Appl, Malaysia. doi:10.1007/s00521-016-2404-7
Machado VC, Lafuente J, Baeza JA (2015) Model-based control structure design of a full-scale WWTP under the retrofitting process. Water Sci Technol 71(11):1661–1671
Hakanen J, Miettinen K, Sahlstedt K (2011) Wastewater treatment: new insight provided by interactive multiobjective optimization. Decis Support Syst 51(2):328–337
Han HG, Zhang L, Hou Y, Qiao JF (2016) Nonlinear model predictive control based on a self-organizing recurrent neural network. IEEE Trans Neural Netw Learn Syst 27(2):402–415
Shen W, Chen X, Corriou JP (2008) Application of model predictive control to the BSM1 benchmark of wastewater treatment process. Comput Chem Eng 32(12):2849–2856
O’Brien M, Mack J, Lennox B, Lovett D, Wall A (2011) Model predictive control of an activated sludge process: a case study. Control Eng Pract 19(1):54–61
Sadeghassadi M, Macnab CJB, Westwick D (2016) Design of a generalized predictive controller for a biological wastewater treatment plant. Water Sci Technol 73(8):1986–2006
Zhang K, Achari G, Sadiq R, Langford CH, Dore MHI (2012) An integrated performance assessment framework for water treatment plants. Water Res 46(6):1673–1683
Han HG, Qian HH, Qiao JF (2014) Nonlinear multiobjective model-predictive control scheme for wastewater treatment process. J Process Control 24(1):47–59
Plakas KV, Georgiadis AA, Karabelas AJ (2016) Sustainability assessment of tertiary wastewater treatment technologies: a multi-criteria analysis. Water Sci Technol 73(7):1532–1540
Cadet C, Béteau JF, Hernandez SC (2004) Multicriteria control strategy for cost/quality compromise in wastewater treatment plants. Control Eng Pract 12(2):335–347
Guerrero J, Guisasola A, Vilanova R, Baeza JA (2011) Improving the performance of a WWTP control system by model-based setpoint optimisation. Environ Model Softw 26(1):492–497
Stare A, Vrečko D, Hvala N, Strmčnik S (2007) Comparison of control strategies for nitrogen removal in an activated sludge process in terms of operating costs: a simulation study. Water Res 41(1):2004–2014
Chen W, Yao C, Lu X (2014) Optimal design activated sludge process by means of multi-objective optimization: case study in benchmark simulation model 1 (BSM1). Water Sci Technol 69(10):2052–2058
De GK, Fenu A, Wambecq T, Weemaes M (2014) Energy saving on wastewater treatment plants through improved online control: case study wastewater treatment plant Antwerp-South. Water Sci Technol 69(5):1074–1079
Dai H, Chen W, Lu X (2016) The application of multi-objective optimization method for activated sludge process: a review. Water Sci Technol 73(2):223–235
Olsson G, Carlsson B, Comas J, Copp J, Gernaey KV, Ingildsen P (2014) Instrumentation, control and automation in wastewater-from London 1973 to Narbonne 2013. Water Sci Technol 69(7):1373–1385
Francisco M, Skogestad S, Vega P (2015) Model predictive control for the self-optimized operation in wastewater treatment plants: analysis of dynamic issues. Comput Chem Eng 82(1):259–272
Sweetapple C, Fu G, Butler D (2014) Multi-objective optimisation of wastewater treatment plant control to reduce greenhouse gas emissions. Water Res 55(1):52–62
García JJV, Garay VG, Gordo EI, Fano FA, Sukia ML (2012) Intelligent multi-objective nonlinear model predictive control (iMO-NMPC): towards the ‘on-line’ optimization of highly complex control problems. Expert Syst Appl 39(1):6527–6540
Hreiz R, Roche N, Benyahia B, Latifi MA (2015) Multi-objective optimal control of small-size wastewater treatment plants. Chem Eng Res Des 102(1):345–353
Faria ABBD, Ahmadi A, Tiruta-Barna L, Sperandio M (2016) Feasibility of rigorous multi-objective optimization of wastewater management and treatment plants. Chem Eng Res Des 115(1):394–406
Olsson G (2012) ICA and me—a subjective review. Water Res 46(6):1585–1624
Rojas JD, Flores-Alsina X, Jeppsson U, Vilanova R (2012) Application of multivariate virtual reference feedback tuning for wastewater treatment plant control. Control Eng Pract 20(1):499–510
Vadenbo C, Guillén-Gosálbez G, Saner D, Hellweg S (2014) Multi-objective optimization of waste and resource management in industrial networks—part II: model application to the treatment of sewage sludge. Resour Conserv Recycl 89(1):41–51
Zheng F, Simpson A, Zecchin A (2015) Improving the efficiency of multi-objective evolutionary algorithms through decomposition: an application to water distribution network design. Environ Model Softw 69(1):240–252
Qiu X, Xu JX, Tan KC, Hussein AA (2016) Adaptive cross-generation differential evolution operators for multiobjective optimization. IEEE Trans Evol Comput 20(2):232–244
Acknowledgements
The authors would like to thank the anonymous reviewers for their valuable comments and suggestions, which helped improve this paper greatly. We declare that we agree to replace the corresponding author by Ying Hou, and we have no conflict of interest. This work was supported by the National Science Foundation of China under Grants 61622301 and 61533002, Beijing Natural Science Foundation under Grant 4172005.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Qiao, JF., Hou, Y. & Han, HG. Optimal control for wastewater treatment process based on an adaptive multi-objective differential evolution algorithm. Neural Comput & Applic 31, 2537–2550 (2019). https://doi.org/10.1007/s00521-017-3212-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-017-3212-4