
Abstract
In this paper, the accuracy of He’s energy balance method for the analysis of conservative nonlinear oscillator is improved based on combining features of collocation method and Galerkin–Petrov method. In order to demonstrate the effectiveness of proposed method, Duffing oscillator with cubic nonlinearity, double-well Duffing oscillator, and nonlinear oscillation of pendulum attached to a rotating support are considered. Comparison of results with ones achieved utilizing other techniques shows improved energy balance method can very effectively reduce the error of simple energy balance method. Also, results show in large amplitude of oscillation, and improved energy balance method yields better accuracy rather than second-order energy balance method based on collocation and second-order energy balance method based on Galerkin method. Improved energy balance method can be successfully used for accurate analytical solution of other conservative nonlinear oscillator.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The nonlinear problem often arising in exact modeling of phenomena in mechanics and physics and study of them is of interest to many researchers. The traditional methods to solve this nonlinear problem cannot be applied if no small parameter exists in equation. To overcome the shortcoming, several analytical methods such as energy balance method [1], homotopy perturbation method [2], harmonic balance method [3], Hamiltonian approach [4], homotopy analysis method [5], max–min approach [6], optimal homotopy perturbation method [7], homotopy perturbation transform method [8], Laplace decomposition method [9], Adomian decomposition method [10], and coupling of homotopy-variational method [11] were proposed by researchers and used for analysis of nonlinear equation [12–23]. First-order approximation of these methods by simple calculation yields good accuracy, but interest to reduce the relative error induced the researchers to implement higher order of approximations, for example, Ma et al. [24] applied higher-order homotopy perturbation method to periodic solutions of nonlinear Jerk equation, Belendez et al. [25] by second-order harmonic balance method obtained accurate frequency–amplitude relation for nonlinear oscillator in which the restoring force is inversely proportional to the dependent variable, and Pirbodaghi et al. [26] obtained an accurate analytical solution for Duffing equations with cubic and quintic nonlinearities using the homotopy analysis method.
Energy balance method was first proposed by professor He [1]; in this method, a variational principle for the nonlinear oscillation is established, and then, a Hamiltonian is constructed, from which the angular frequency can be readily obtained by collocation method. First-order energy balance method yields accurate solution in comparison with first-order approximation of other techniques. Durmaz et al. [27] obtain higher-order approximation of energy balance method based on collocation approach for nonlinear Duffing oscillator. Sfahani et al. [28] improved the accuracy of energy balance method using a new trial function. Durmaz and Kaya [29] used Galerkin method as weighting function and obtain higher-order approximations.
In the present study, the accuracy of He’s energy balance method for analysis of conservative nonlinear oscillator is improved based on combining features of collocation method and Galerkin–Petrov method [30]. Results shows that this approach very effectively reduce relative error of first-order energy balance method.
2 The basic idea of He’s energy balance method
Consider a general form on nonlinear oscillator with initial conditions in the form
Its variational can be written as
where \( T = \frac{2\pi }{\omega } \) is period of nonlinear oscillation and \( F(u) = \int {f(u)du} \).
The Hamiltonian, therefore, can be written in the form
Equation (3) yields the following residual
We assume the first-order approximate solution as follows
Substituting Eq. (5) into Eq. (4) yields the following residual
And finally collocation at \( \omega t = \frac{\pi }{4} \) gives
3 Improved energy balance method
In order to improve the accuracy of energy balance method, we consider the solution of Eq. (1) as follows
Equation (8) must satisfy initial conditions; therefore, we have
It should be noted that method does not have any limitation for trial solution, and other functions could be considered as trial solution in Eq. (8). Other possible trial functions could be found in [31].
Now, by using Eq. (9), we can rewrite Eq. (8) as follows
By inserting Eq. (10) into Eq. (4), residual are obtained. Obtained residual contain two unknown parameters, one of them is ω and other is b. In order to determine unknown parameters, we need two equations; the first equation obtained based on collocation method as follows
Also, the second equation obtained based on Galerkin–Petrov method [30] as follows
Finally, by simultaneously solution of Eqs. (11) and (12), unknown parameters are determined for different value of A.
4 Application
4.1 Example 1
Consider Duffing oscillator with cubic nonlinear term in the following form
The variational of Eq. (13) is given as follows
Its Hamiltonian, therefore, can be written in the form
In order to determine residual, we substitute Eq. (10) into Eq. (15), and then, we have
Based on collocation method, we have
Also, based on Galerkin–Petrov method [30], we have
By solving Eqs. (17) and (18) simultaneously, one can obtain amplitude–frequency relation. Simple energy balance method based on collocation method yields the following amplitude–frequency relation [27] for this example
Comparisons between approximate frequencies obtained by different techniques are given in Table 1.
Consider a case with ε = 10 and A = 5; for this case by using Eq. (19), simple EBM solution was obtained in the following form
Also, improved EBM solution was obtained as follows
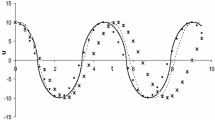
The comparison between analytic solutions obtained in Eqs. (20) and (21) in conjunction with fourth-order Runge–Kutta numerical solution was presented in Fig. 1. Comparison between phase-plane diagram obtained with analytical and numerical solution was presented in Fig. 2. The difference between analytical and numerical solution is plotted in Fig. 3. As seen in Table 1 and Figs. 1, 2 and 3, the results obtained by improved energy balance method yield very good accuracy and are in better agreement with numerical solution.

A comparison between the simple EBM and improved EBM in conjunction with the fourth-order Runge–Kutta method for example 1

Phase-plane diagram obtained by analytical and numerical solution for example 1

Difference between analytical and numerical solution for example 1
4.2 Example 2
The Duffing equation with a double-well potential (with a negative linear stiffness) is an important model. One physical realization of such a Duffing oscillator model is a mass particle moving in a symmetric double-well potential. This form of the equation also appears in the transverse vibrations of a beam when the transverse and longitudinal deflections are coupled [32, 33]. Double-well Duffing oscillator is in the following form
When A > 2, oscillation occurs between symmetric limits [− A, A]. For the case 1 < A < 2, the oscillation occurs around stable equilibrium points u = +1 and is asymmetric about it. In the present study, we consider first case with A > 2.
The variational of Eq. (22) is given as follows
Its Hamiltonian, therefore, can be written in the form
In order to determine residual, we substituting Eq. (10) into Eq. (24); then, we have
Based on collocation method, we have
Also, based on Galerkin–Petrov method [30], we have
By solving Eqs. (26) and (27) simultaneously, one can obtain amplitude–frequency relation. Simple energy balance method based on collocation method yields the following amplitude–frequency relation [33] for this example
Comparisons between approximate periods obtained by simple and improved energy balance method and exact period are given in Table 2. Frequency and period of oscillation have the following relation with together
When A = 1.7, by using Eq. (28), simple EBM solution obtained in the following form
And improved EBM solution obtained as follows
Also, when A = 10, by using Eq. (28), simple EBM solution obtained in the following form
For this case, improve EBM solution obtained as follows
The comparison between analytic solutions obtained in Eqs. (30), (31), (32), and (33) in conjunction with fourth-order Runge–Kutta numerical solution was presented in Figs. 4 and 5. The results show that the improved energy balance method very effectively reduce error and yields better accuracy.

A comparison between the simple EBM and improved EBM in conjunction with the fourth-order Runge–Kutta method for example 2 (A = 1.7)

A comparison between the simple EBM and improved EBM in conjunction with the fourth-order Runge–Kutta method for example 2 (A = 10)
4.3 Example 3
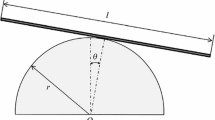
Mathematical model of the nonlinear oscillation of pendulum attached to a rotating support [34–36] is in the following form
where Λ is a function of rotating support angular velocity, the acceleration of gravity, and length of pendulum. Without loss of generality, we set Λ = 1. In order to solve Eq. (34) by improved energy balance method, we rewrite this equation based on Taylor expansion in the following form
The variational of Eq. (35) is given as follows
Its Hamiltonian, therefore, can be written in the form
In order to determine residual, we substituting Eq. (10) into Eq. (37); then, we have
Based on collocation method, we have
Also based on Galerkin–Petrov method [30], we have
By solving Eqs. (39) and (40) simultaneously, one can obtain amplitude–frequency relation. Simple energy balance method based on collocation method yields the following amplitude–frequency relation [36] for this example
When A = 1, by using Eq. (41), simple EBM solution obtained in the following form
And improve EBM solution obtained as follows
Comparison between simple EBM, improved EBM, and numerical solution has been done in Table 3; as can been seen, improved EBM solution yields better accuracy, and results are in good agreement with numerical solution.
When A = 1.5, by using Eq. (41), simple EBM solution obtained in the following form
And improved EBM solution obtained as follows
The comparison between analytic solutions obtained in Eqs. (44) and (45) in conjunction with the fourth-order Runge–Kutta numerical solution was presented in Fig. 6.

A comparison between the simple EBM and improved EBM in conjunction with the fourth-order Runge–Kutta method for example 3 (A = 1.5)
5 Conclusion
In this study, accuracy of He’s energy balance method is improved for the analysis of conservative nonlinear oscillator. To illustrate the accuracy of proposed method, three examples are considered. Obtained results are in very good agreement with those obtained via numerical solution, and error of simple energy balance method is very effectively reduced. We conclude this method is very effective and convenient for analysis of conservative nonlinear oscillators.
References
He JH (2002) Preliminary report on the energy balance for nonlinear oscillations. Mech Res Commun 29:107–111
He JH (1999) Homotopy perturbation technique. Comput Met Appl Mechan Eng 178:257–262
Mickens RE (1996) Oscillations in planar dynamics systems. World Sci, Singapore
He JH (2010) Hamiltonian approach to nonlinear oscillators. Phy Lett A 374:2312–2314
Liao SJ, Cheung AT (1998) Application of homotopy analysis method in nonlinear oscillations. ASME J Appl Mechan 65:914–922
He JH (2008) Max-min approach to nonlinear oscillators. Int J Nonlinear Sci Numer Simul 9:207–210
Herisanu N, Marinca V (2010) Explicit analytical approximation to large amplitude non-linear oscillations of a uniform cantilever beam carrying an intermediate lumped mass and rotary inertia. Meccanica 45:847–855
Khan Y, Wu Q (2011) Homotopy perturbation transform method for nonlinear equations using He’s polynomials. Comput Math Appl 61:1963–1967
Khan Y, Austin F (2010) Application of the Laplace decomposition method to nonlinear homogeneous and non-homogenous advection equations. Zeitschrift fur Naturforschung 65a:849–853
Rebelo PJ (2011) An approximate solution to an initial boundary value problem to the one-dimensional Kuramoto–Sivashinsky equation. Int J Numer Methods Biomed Eng 27:874–881
Akbarzede M, Langari J, Ganji DD (2011) A coupled homotopy-variational method and variational formulation applied to nonlinear oscillators with and without discontinuities. ASME J Vibration Acoust 133:044501
Cveitcanin L (2006) Homotopy–perturbation for pure nonlinear differential equation. Chaos, Solitons Fractals 30:1221–1230
Ozis T, Yildirim A (2007) Determination of the frequency-amplitude relation for a Duffing-harmonic oscillator by the energy balance method. Comput Mathe Appl 54:1184–1187
Marinca V, Herisanu N, Bota C (2008) Application of the variational iteration method to some nonlinear one-dimensional oscillations. Meccanica 43:75–79
Herisanu N, Marinca V (2010) A modified variational iteration method for strongly nonlinear problems. Nonlinear Sci Lett A 1:183–192
Belendez A, Belendez T, Neipp C, Hernandez A, Alvarez ML (2009) Approximate solutions of a nonlinear oscillator typified as a mass attached to a stretched elastic wire by the homotopy perturbation method. Chaos, Solitons Fractals 39:746–764
Herisanu N, Marinca V (2012) Optimal homotopy perturbation method for a non-conservative dynamical system of a rotating electrical machine. Z Naturforsch 67a:509–516
Khan Y, Smarda Z (2012) Modified homotopy perturbation transform method for third order boundary layer equation arising in fluid mechanics. Sains Malays 41:1489–1493
Khan Y, Madani M, Yildirim A, Abdou MA, Faraz N (2011) A new approach to Van der Pol’s Oscillator Problem. Z Naturforsch 66a:620–624
Rebelo PJ (2012) An approximate solution to an initial boundary value problem: Rakib–Sivashinsky equation. Int J Comput Math 89:881–889
Saha Ray S, Patra A (2013) Haar wavelet operational methods for the numerical solutions of fractional order nonlinear oscillatory Van der Pol system. Appl Math Comput 220:659–667
Sardar T, Saha Ray S, Bera RK, Biswas BB (2009) The analytical approximate solution of the multiterm fractionally damped Van der Pol equation. Physica Scr 80:025003
Daeichin M, Ahmadpoor MA, Askari H, Yildirim A (2013) Rational Energy Balance Method to Nonlinear Oscillators with Cubic term. Asian-Eur J Math 06:1350019
Ma X, Wei L, Guo Z (2008) He’s homotopy perturbation method to periodic solutions of nonlinear Jerk equations. J Sound Vib 314:217–227
Belendez A, Mendez DI, Belendez T, Hernandez A, Alvarez ML (2008) Harmonic balance approaches to the nonlinear oscillators in which the restoring force is inversely proportional to the dependent variable. J Sound Vib 314:775–782
Pirbodaghi T, Hoseini SH, Ahmadian MT, Farrahi GH (2009) Duffing equations with cubic and quintic nonlinearities. Comput Math Appl 57:500–506
Durmaz S, Demirbag SA, Kaya MO (2010) High order He’s energy balance method based on collocation method. Int J Nonlinear Sci Numer Simul 11:1–5
Sfahani MG, Barari A, Omidvar M, Ganji SS, Domairry G (2011) Dynamic response of inextensible beams by improved energy balance method. Proc Inst Mech Eng Part K: J Multi-body Dyn 225:66–73
Durmaz S, Kaya MO (2012) High-order energy balance method to nonlinear oscillators. J Appl Math 2012:518684
Yazdi MK, Khan Y, Madani M, Askari H, Saadatnia Z, Yildirim A (2010) Analytical solutions for autonomous conservative nonlinear oscillator. Int J Nonlinear Sci Numer Simul 11:979–984
Micknes RE (1986) A generalization of the method of harmonic balance. J Sound Vib 111:515–518
Wu BS, Sun WP, Lim CW (2007) Analytical approximations to the double-well Duffing oscillator in large amplitude oscillations. J Sound Vib 307:953–960
Momeni M, Jamshidi N, Barari A, Ganji DD (2011) Application of He’s energy balance method to Duffing-harmonic oscillators. Int J Comput Math 88:135–144
Ghafoori S, Motevalli M, Nejad MG, Shakeri F, Ganji DD, Jalaal M (2011) Efficiency of differential transformation method for nonlinear oscillation: comparison with HPM and VIM. Curr Appl Phys 11:965–971
Yazdi MK, Ahmadian A, Mirzabeigy A, Yildirim A (2012) Dynamic analysis of vibrating systems with nonlinearities. Commun Theor Phys 57:183–187
Younesian D, Askari H, Saadatnia Z, Yazdi MK (2011) Periodic solutions for nonlinear oscillation of a centrifugal governor system using the He’s frequency-amplitude formulation and He’s energy balance method. Nonlinear Sci Lett A 2:143–148
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Khan, Y., Mirzabeigy, A. Improved accuracy of He’s energy balance method for analysis of conservative nonlinear oscillator. Neural Comput & Applic 25, 889–895 (2014). https://doi.org/10.1007/s00521-014-1576-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-014-1576-2