
Abstract
There are two main avenues to design space exploration. In the first approach, a simulation is run, analyzed, the problem modified, and the simulation run again. In the second approach, an ensemble simulation is performed and the battery of results is leveraged to construct a surrogate model for a given quantity of interest (QoI). The first approach allows a practitioner to methodically move through the design space and analyze a solution field. A disadvantage of this technique is that each new simulation requires time-consuming setup. The second approach provides the practitioner with a global view of the problem, but requires a priori design space limits and the QoI specification. In this work, we introduce an immersive simulation software framework that enables practitioners to maintain the flexibility of the first approach, while eliminating the burden of setting up new simulations. Immersive simulation can also be used to inform the second approach, establishing limits and clarifying QoI selection prior to the launch of an ensemble simulation. We demonstrate live, reconfigurable visualization of on-going simulations coupled with live, reconfigurable problem definition that guides users in determining problem parameters. Ultimately, an immersive simulation framework enables more efficient design space exploration that reduces the gap between simulations, data analysis, and insight extraction.
Article Highlights
-
Introduce and demonstrate an immersive simulation software framework that enables in situ visualization and problem redefinition.
-
Efficient quantity of interest extraction that reduces disk storage by a factor of 50,000.
-
Demonstrate the compatibility of immersive simulation with ensemble simulation and sensitivity analysis.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The solution of systems of partial differential equations (PDEs) provides scientists, engineers, and other practitioners with insight into a wide variety of physical phenomena. High-performance computing (HPC) is the driving force behind increasingly accurate simulations that are capable of rapidly solving multi-physics, three-dimensional systems, or higher order approximations. The traditional simulation workflow for PDE solvers consists of sequential steps: meshing, definition of boundary conditions, solver, and visualization. This structure leads to numerous inefficiencies. Problem redefinition and the role of visualization as a post-processing step delay engineering/scientific discovery and design. In HPC applications, the practitioner’s pursuit of insight is hampered not only by time devoted to each new problem redefinition, but also by additional queue time. These traditional workflow inefficiencies inhibit design space exploration and subsequent ensemble simulation.
One method to address workflow inefficiencies is with notification and monitoring systems that query simulation data during runtime [38, 40, 46]. While this output does provide practitioners with basic solver behavior, such as convergence, it does not permit live reconfigurable simulation. Co-processing, the concept of performing in situ visualization and analysis while a simulation is on-going, allows users to access simulation data immediately and mitigates the burden of writing large simulation data to disk [17, 22, 29, 48]. A summary of in situ methods, infrastructures, and applications to HPC is presented in the state-of-the-art (STAR) report [7]. The authors observe that while numerous infrastructures are available, only a limited number of production quality frameworks have emerged. For instance, there are co-processing implementations within VisIt [11] using ADIOS [26], Lib-Sim [31], GLEAN [49], and in ParaView Catalyst (Catalyst) [1, 4]. A concluding remark in [7] is that given the entry cost for new in situ frameworks is relatively high, a move towards a generic data interface would be of great value. More recently, attempts have been made to address this concern. The introduction of the in situ interface SENSEI [6] and infrastructure ALPINE [27] provides an interface between a given solver and a variety of visualization and analysis routines. While SENSEI is designed solely to support Catalyst, Lib-Sim, and ADIOS infrastructures, ALPINE plays both the supporting role and provides its own execution model and visualization. In [5], a performance analysis of SENSEI shows that the infrastructure is highly flexible and has low overhead.
A powerful extension of co-processing is computational steering, where users can take advantage of real-time simulation feedback to rapidly explore the design space and extract insight. Computational steering has been previously demonstrated in the flow solver PHASTA with Catalyst [52, 56], though steering was accomplished via live edits of a solver parameter file, and geometric deformations were not implemented. More recently, Catalyst has been used to model turbidity currents [9], where steering is introduced through application specific LibMesh-sedimentation code on solver parameters such as time step and tolerances. Another geological application utilized in situ visualization in earthquake modeling, but did not use computational steering [34]. More recently, an approach to “human in the loop” scientific workflows employing some elements of computational steering alongside provenance data monitoring enables data reduction and lower execution time [33, 43]. In [53], computational steering is enabled via a user interface; however, this software is closed source. These examples show the current state of computational steering either requires the in situ editing of simulation solver parameter inputs or are closed source.
Ensemble simulation, informed via prior design space exploration, is a useful means of further insight extraction. Through visualizing and analyzing solution output across a range of different realizations of input parameters, practitioners can better understand how some output quantity of interest (QoI) is a function of input variables. The field of uncertainty quantification (UQ) addresses the challenge of mapping uncertain inputs to output QoIs [19, 28, 54]. Large ensembles allow the collection of useful statistics, creation of surrogate models for a given QoI, sensitivity analysis, and much more. Furthermore, the evaluation of ensembles has traditionally been performed in serial, with parallel implementations that are predominantly ad hoc. While there has been some commercial software development in this area [2], in this work, we employ the open-source Python library libEnsemble, developed at Argonne National Laboratory as part of the Department of Energy Exascale Computing Project to coordinate the concurrent evaluation of dynamic ensembles of calculations on massively parallel resources [25]. In [10], libEnsemble is coupled with multiobjective optimization to achieve better resource utilization for HPCs. Having performed an ensemble simulation, the practitioner may access one of several open-source UQ Python libraries such as Uncertainpy [47], chaospy [16], and UQ-PyL [50]. Additional Python libraries for specific UQ fields such as active subspaces are also in use [12]. The priority research directions for in situ data management identified by the authors in [37] include ensemble analysis, UQ, and surrogate models. We note that there is a distinction between random input variables addressed by UQ and design variables examined in design space exploration. In this work, we apply UQ methodologies to design variables by treating them as uniform random variables.
1.1 Contributions of this work
While numerous studies have demonstrated co-processing, to the authors’ knowledge, the valuable link between co-processing capabilities, extraction of relevant data from ensemble generation, and subsequent application of UQ techniques such as sensitivity analysis, has not been explored. In this document, we introduce an immersive simulation software framework that enables more rapid design space exploration with computational steering and subsequently informs ensemble generation for more efficient insight extraction.
Our work builds directly upon previous implementations of Catalyst in the flow solver PHASTA [4, 56]. Earlier demonstrations of co-processing functioned with Catalyst hooked directly into the PHASTA solver and required a high level of expertise in the interfaces. Our work differs in that we implement SENSEI to interface between the solver and Catalyst, easing the difficulty a practitioner may face as they implement immersive simulation. The main contribution of this work is to introduce and demonstrate an immersive simulation software framework. We describe the relationship between a PDE solver and immersive simulation software components that enable computational steering and modification of physical, geometric, and solver parameters. We provide open-source software linkages that others can leverage or modify as needed. Equipped with an immersive simulation framework, a practitioner may interact with their simulation in situ via the ParaView graphical user interface (GUI) .
We complement these immersive simulation tools with a demonstration of libEnsemble for straightforward ensemble simulation and chaospy to implement UQ methods to analyze the ensemble results. We show the ability of immersive simulation and ensemble tools to complement and enhance one another.
The remainder of this paper is organized as follows. Section 2 describes the simulation workflow, first addressing the traditional approach in Sect. 2.1 followed by an immersive simulation workflow in Sect. 2.2. Next, Sect. 3 details the software elements that make up an immersive simulation software framework. Section 4 provides a numerical demonstration of immersive simulation tools on a 2D aggressive subsonic diffuser with the fluid solver PHASTA. Section 5 describes ensemble simulation software tools before Sect. 6 applies the ensemble tools, coupled with an immersive simulation framework, to a global sensitivity analysis. Finally, Sect. 7 summarizes this study’s conclusions.
2 The simulation workflow
We now describe the traditional simulation workflow, highlighting aspects that inhibit scientists’ and engineers’ ability to gain insight from their simulations. We then present an immersive simulation workflow that alleviates standard workflow inefficiencies.
2.1 Traditional simulation workflow
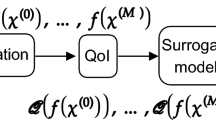
The traditional simulation workflow, whether a lone simulation (Fig. 1a), or an ensemble simulation (Fig. 1b), consists of a series of sequential steps. Considering Fig. 1a, we refer to components of the workflow that occur before and after the solver step as belonging to the pre- and post-processor, respectively. First, in the pre-processor, we develop an idea into a solvable problem through defining an appropriate geometry, mesh, and boundary conditions. Next, we calculate the solution to our problem through our chosen PDE solver. Finally, in the post-processing section, we perform visualization and data analysis to determine the utility of the solution data. If the present results are satisfactory, then we have obtained the insight we seek and the simulation workflow is complete. Alternatively, if the results are unsatisfactory and we want to redefine the problem to explore the design space, then we return to the pre-processing region of the workflow.

Traditional singular (a) and ensemble (b) simulation workflows
Difficulties with the traditional simulation workflow arise due to the computational expense of individual workflow components coupled with the persistent need for problem redefinition. Solution data may persuade a practitioner to return to the pre-processing steps either to ask a new question of the simulation, or to improve the method of answer to an existing question. As an example, let us consider the visualization of a fluid flow. Inspection of high gradient regions in the flow, such as boundary and shear layers, may reveal that further mesh refinement is needed to accurately resolve flow behavior. Alternatively, the practitioner may decide geometric adjustments would be a productive line of inquiry and be motivated to update the geometry and associated mesh. The role of problem redefinition as a post-processing step in the traditional workflow delays engineering and scientific insight.
A vital concern for HPC applications that will grow with the arrival of exascale computing is the bottleneck of IO. The PDE studied in [15], in which an unsteady flow problem is addressed, was scaled up to 3.1 million processes and 92 billion elements in [39]. To save the complete solution of a simulation, this size would generate O(1) terabyte of data per second. Although the code can determine a write frequency and produce numerous flow statistics, analysis of unsteady flow structures is not practical with the traditional simulation workflow. To undertake post-processing steps that involve writing, and re-reading of data at this rate is unreasonable. Additionally, we find conventional methods impractical even if we consider specialized libraries that achieve close to machine IO bandwidth limit (\(240 \, \mathrm{Gb}/\mathrm{s}\), or more than 4 s to write 1 s of simulation data) [18, 30].
Both the aforementioned traditional workflow concerns, i.e., the delay of insight caused by problem redefinition and impracticality of visualization in HPC applications, are exacerbated when we consider ensemble simulation; see Fig. 1b. Managing an array of pre-processor settings and tailoring post-processing steps to each ensemble member is cumbersome for the practitioner. Additionally, the traditional workflow delays the initial setup of an ensemble due to the problem redefinition necessary to figure out design space limits and adjust a given QoI.
2.2 Immersive simulation workflow
An immersive simulation workflow intends to mitigate some of the standard workflow inefficiencies through live, reconfigurable simulation. In essence, a new co-processing stage integrates steps from both pre-processing, such as problem definition, and post-processing, such as visualization and data analysis, to be contemporary with the on-going/live advancement of the flow solver; see Fig. 2.

Immersive simulation workflow
Co-processing methods aim to vastly reduce the quantity of data storage through in situ visualization that the user is able to interact with and calibrate to their specific needs [22, 48]. In co-processing, the visualization pipeline is shifted from being a post-processing step within the PDE solver workflow to be concurrent with the simulation. The progression of HPC from present petascale to future exascale computing, coupled with corresponding increase in simulation complexity, such as multi-scale and multi-physics, further enhances the desire for co-processing as opposed to traditional post-processing capabilities.
Immersive simulation couples co-processing that allows live visualization with computational steering that allows live problem redefinition. When immersed, a practitioner is capable not only of visualizing their problem solution in situ, but also of intuitively redefining the problem definition for rapid exploration of the design space. The practitioner may choose to steer solver parameters, boundary conditions, and even the problem geometry depending on what aspects of the problem space engage them. In the HPC setting, an immersive simulation practitioner can avoid the queue time associated with each new problem redefinition. In this manner, the behavior of different combinations of input parameters can be quickly understood and inform appropriate limits for subsequent or concurrent ensemble simulations.
3 Software tools for immersive simulation
In this section, we describe the core components of an immersive simulation software framework; see Fig. 3. This framework enables multiple forms of immersive simulation that work with a traditional PDE solver to perform both live, reconfigurable visualization and live, reconfigurable problem definition. The colored boxes indicate software components, while the grey boxes show functionality. Thin arrows out of the in situ infrastructure Catalyst, or interface SENSEI, represent data extraction/compression, while thin arrows into these components relay analyst input via the ParaView GUI. Large data streams, shown by thick arrows, correspond to the full solution state (problem mesh and solution). The analyst obtains insight, shown by a wide arrowhead, through engagement in an immersive simulation through the ParaView GUI. A crucial aspect of immersive simulation is that the commands related by the analyst to reconfigure the simulation are conveyed with small data streams. With this setup, an analyst can operate the live visualization and problem definition for swift simulation feedback and insight extraction. We now provide some context on the integration of core immersive simulation software components SENSEI, Catalyst, and ParaView with the PDE solver. While we use the fluid solver PHASTA, many aspects of the links between software and all of the resulting advantages are general. We note that Catalyst and Para-View are open-source platforms developed by Kitware.

Immersive simulation software framework
3.1 SENSEI in situ interface
SENSEI is a generic in situ interface best summarized by the underlying premise of “write once, use everywhere” [6]. The interface supports a number of in situ infrastructures, such as VisIt/Libsim, Catalyst, and ADIOS. Simulation output is mapped to the VTK data model via a data adaptor and an analysis adaptor, while an in situ bridge links the respective adaptors and prompts in situ analysis. An in-depth description of SENSEI is provided in [6] as well as a brief view from the simulation code, and the perspective of different choices of in situ infrastructure. In the SENSEI repository, mini-apps are provided as a guide for different PDE solver applications. The mini-app topics span SENSEI Python bindings, C++ solvers for dynamic periodic oscillators, the Mandelbrot set and vortex simulation, and the PHASTA mini-app that we build upon for this work.
The minimum requirement to implement the SENSEI mini-app with a given PDE solver is the introduction of SENSEI specific data streams that pass the problem mesh and solution to enable live, reconfigurable visualization (large data stream). However, if computational steering is desired, the specific variables identified to perform that computational steering (small data steam) are also needed. In that case, the PDE solver must define these steering variables in such a way that the appropriate sections of the code that depend on these variables are able access these variables to complete the bi-directional communication that enables computational steering.
In general, the linking of software to enable immersive simulation appears in three places. First, the SENSEI mini-app bridge must be updated to match any parameters the practitioner seeks to pass from their PDE solver. As shown in [6], the bridge is custom to the implementation code, and requires initialization, analysis, and finalization steps. In this work, we focus on how this bridge communicates with the PDE solver from the solver’s view, and also on the practical implementation in terms of necessary scripts at runtime. From the perspective of the PHASTA solver, the abbreviated simulation code to highlight the SENS-EI footprint is presented in Fig. 4. Within the simulation script, we make calls to subroutines that initialize, perform co-processing, and finalize the interaction of the interface with the solver.

Pseudocode of the SENSEI footprint in PDE solver simulation script

Pseudocode of the PDE solver link between simulation script in Fig. 4 and SENSEI
These subroutines are defined in a second PDE solver script sensei_interface.f shown in Fig. 5. Figure 5 essentially refines the main simulation routine calls to SENSEI by providing additional context. The routines called here are defined in the SENSEI PHASTA bridge. For instance, the initialization subroutine calls any in situ analysis adaptor, such as Catalyst, before communicating mesh details vital to live visualization and a set of fields determined by the user.
For the full context of these scripts, we refer the interested reader to our GitHub repository www.github.com/SimNautilus/nautilusFlow that documents the links between the PDE solver PHASTA and in situ interface SENSEI. In our implementation of an immersive simulation framework, we initially setup the main solution variables, such as mesh coordinates, velocity and pressure fields, for live visualization. Next, we improve the framework with the introduction of steering parameters or more complex fields that are passed to SENSEI.
Having setup the PDE solver to communicate fields to SENSEI, we next address the implementation at runtime. As noted, several in situ infrastructures are supported. The practitioner can setup the desired analysis type with ease in the equivalent of senseiPhasta.xml; see Fig. 6. This script is called via sensei_adaptors_init() during the SENSEI initialization steps in Fig. 5. While the SENSEI bridge is created during initialization, the analysis it facilitates, for instance via Catalyst, is reconfigurable during a simulation run.

Pseudocode of the runtime XML description that configures in situ analysis routines [6]
3.2 Catalyst in situ infrastructure
Catalyst, formerly the ParaView co-processing library [15], is an in situ visualization library with an adaptable API that is built on VTK [41] and ParaView [1]. Through building the library with VTK, Catalyst can access a plethora of useful algorithms such as IO writers, visualization filters, and graphics rendering. The visualization pipelines can be described in C++ or Python, and the ParaView GUI facilitates the generation of Catalyst co-processing Python scripts both directly, and via a Python trace and shell. Additionally, Catalyst is designed to connect visualization pipelines remotely through server–client architecture. While the addition of the Catalyst adaptor to solvers must to some degree inhibit solver performance, this influence has been shown to be negligible when compared to the savings in file I/O and data management [15]. In our numerical example, we implement Catalyst with the fluid solver PHASTA via the SENSEI in situ interface, specifically through analysis adaptor in Fig. 6.
A powerful function of Catalyst that has been alluded to is the setup of ParaView pipelines. The entire pipeline script can be generated intuitively from a ParaView GUI session that writes out a Catalyst co-processing script, as shown in Fig. 7. The co-processing script can be tailored to specific problems and is loaded automatically when live visualization is launched to facilitate the user’s analysis. The practitioner can update the pipeline live through the Catalyst connection in the ParaView GUI.

Pseudocode of the Catalyst co-processing script that enables in situ visualization and loads a chosen ParaView pipeline [4]
Having described the implementation of the interface SENSEI and infrastructure Catalyst, we are equipped with an immersive simulation framework of Fig. 3. With these immersive simulation tools in hand, a practitioner can leverage interactive visualization and problem redefinition for efficient design space exploration.
4 Numerical demonstration: immersive simulation tools
We demonstrate the utility of immersive simulation tools on a 2D aggressive subsonic diffuser simulated in PHASTA [52]. In this section, we first describe the diffuser model equipped with parametric geometry deformation and then illustrate the application of immersive simulation tools described in Sect. 3. Code examples of the implementation of immersive simulation tools in PHASTA can be found in our GitHub repository www.github.com/SimNautilus/nautilusFlow.
4.1 2D aggressive subsonic diffuser
Aircraft frequently requires air intake systems that reroute air from the free stream velocity and slow it to speeds appropriate for the engine [3]. The intake arrives at the compressor on the aerodynamic interface plane (AIP). It is desirable that the AIP air exhibits low swirl, low distortion, and high pressure recovery; with minimal increase of the intake drag, lest engine performance is inhibited [32]. Therefore, understanding of intake flow is imperative to effective simulation of engine performance.
Typical intake geometries consist of a duct to direct the flow connected to a diffuser that, via an increase in cross-sectional area, trades upstream kinetic energy for a rise in downstream static pressure. This increase in area produces an adverse pressure gradient that encourages separated flow.
The diffuser model we study is motivated by a 3D transonic diffuser with two significant simplifications made to reduce computational expense: the model is a 2D slice of the 3D geometry midplane and the flow is treated as incompressible as opposed to compressible. Shifting from 3D to 2D greatly reduces the number of elements in the simulation mesh, and treating the flow as incompressible permits a much larger time step while maintaining a converging simulation. We emphasize the severity of the model simplifications on the diffuser; the purpose of this simulation is to demonstrate an immersive simulation software framework and to capture quantitatively the influence of upper and lower blowers on core flow behavior.
The diffuser geometry, depicted in Fig. 8, is considered compact with a length to diameter ratio of \(L/D \sim 1.03\) and a high expansion ratio of ER\( = 2.2\). Active flow control is implemented through two tangential blowers, denoted as the upper blower (UB) and lower blower (LB). The blowers are designed to inhibit or delay flow separation on their respective surfaces. We prescribe a trapezoid waveform inflow condition to both the UB and LB, where we set the wave’s mean, amplitude, and period. The time the trapezoid wave spends rising, falling, and at the maximum value of the wave is set to \(1.5\mathrm{e}-3 \, \text {s}\), \(1.5\mathrm{e}-3 \, \%\) and \(4\mathrm{e}-3 \, \text {s}\), respectively. We have fixed the period to \(8\mathrm{e}-3 \, \text {s}\) for the study and ensured a temporal resolution of 80 time steps for each blower period with a time step of d\(t=1\mathrm{e}-4\, \text {s}\).

2D aggressive subsonic diffuser geometry a entire geometry, b close-up of the blower control region showing the UB and LB
The incompressible flow through the diffuser is modeled with an inflow Mach number \(M_\infty \approx 0.052\) and bulk Reynolds number Re\(_b \approx 4\mathrm{e}4\). This Reynolds number is similar to the 2D plane diffuser experiments [8, 35]. The computational mesh made up of 241k tetrahedral elements is shown in Fig. 8. The mesh is only one element deep (into the page as displayed in Fig. 8), and periodic boundary conditions are employed in the depth direction to model 2D flow. Every boundary layer has first point off the wall is set to \(2\mathrm{e}-6 \, \text {m}\) and a stretching ratio of 1.25 to maintain \(y^+ < 1\) at the wall boundaries. The mesh is further refined at the entrance of the blowers and downstream to resolve the recirculating region.
In this study, we examine the QoI measuring the recirculating region length defined as
where \(\bar{u}_x\) denotes the time-averaged stream-wise velocity and \(d_{\mathrm{wall}}\) the distance from the wall. We integrate with respect to \(d_{\mathrm{wall}}\) to penalize recirculating regions that extend further into the core body of the flow. In the case where separation occurs in both the lower and upper walls, we add the respective integrals together prior to taking the square root to find the length.
4.1.1 Parametric geometry deformation
To explore the effect of UB location along the curved upper extent of the diffuser, a custom parametric mesh modification tool was developed which slides the UB tangentially along the curved surface, moving the mesh vertices smoothly, allowing for geometric design exploration in situ without the need for re-meshing or multiple hand-generated CAD configurations. This procedure relies on Sederberg’s freeform deformation algorithm [42] with a geometry-fitted collection of 493 background non-uniform rational B-Spline (NURBS) patches deformed in unison with a custom geometry management algorithm. The geometry modification is driven by a single parameter \(\varphi \) varying continuously from 0 to 1 representing locations far down the curve of the diffuser and past midway up the diffuser, as depicted in Fig. 9b. These extents were chosen to limit mesh distortion under geometry modification. Figure 9a illustrates the collection of background NURBS patches already deformed to the \(\varphi =1\) extent.
This geometry deformation algorithm was custom designed for the diffuser problem, employing low-level Open-CASCADE commands. The general procedure here is extensible to other 2D geometric considerations. Furthermore, this procedure is a proof of concept for how geometric variables can be included in immersive simulation design space exploration procedures. Future improvement to this procedure may incorporate higher level abstractions for parametric geometry modification such as the programmable CAD system Engineering Sketchpad [21]. More general tools for geometric modification to HPC applications are presented in [51].

Parametric 2D aggressive subsonic diffuser geometry: a spline track used to guide the deformation of the background NURBS surfaces; b close-up of the blower control region showing blower position set to \(\varphi = 0\) and \(\varphi =1\)
4.2 Computational steering
We employ Catalyst, SENSEI, and the ParaView GUI to implement live visualization and computational steering on the 2D diffuser. The parameters for which we enable steering are the mean and amplitude of the UB and LB velocities, the UB position parameterized between \(\varphi = 0\) and \(\varphi =1\), as shown in Fig. 9b, and the weight term w, useful for assessing time-averaged quantities. The QoI we are interested in, the recirculating region defined in Sect. 4.1, is measured as a time average to account for the transient boundary conditions on the UB and LB. We update the time-averaged stream-wise velocity with
where \(u_x\) is the present time step’s stream-wise velocity and \(\bar{u}^{t_0}_x\) denotes the previous time step’s averaged stream-wise velocity. Increasing w weighs recent steps more heavily and “shortens” the time-average interval, while decreasing w reduces the weight of new time steps and “lengthens” the time-average interval. In general, we set \(w=0.01\).
To equip PHASTA with the steering parameters, the chosen fields must be passed from the PHASTA solver to SENSEI, and the SENSEI PHASTA adaptor updated for these fields as described in Sect. 3. Once implemented, the steering parameters can be interacted with during a Catalyst live visualization; see Fig. 10. The user can adjust a given steering parameter, for instance the UB position, and immediately see how this alteration impacts the flow behavior. In Fig. 10, we see a complex Catalyst VTK pipeline that determines regions in the diffuser flow with negative time-averaged stream-wise velocity and calculates the associated recirculation length. Note that the practitioner’s interaction with the ParaView GUI allows them to create, visualize, and explore different VTK pipelines and easily examine other QoIs. In this manner, the practitioner can directly observe the effect of variations in key parameters on their QoIs, gain insight more rapidly, and do so without saving the visualized flow data to disk.

ParaView GUI displaying the Catalyst live visualization and SENSEI computational steering. On the left, the pipeline browser shows the visualization pipeline and steering parameters
Prior to a more complete sensitivity analysis, we leverage computational steering to clarify QoI selection and setup design space limits for subsequent ensemble simulation. Our recirculation length QoI, defined in Sect. 4.1, initially accounted for the upper recirculation area alone and integrated over dy rather than \(d_{\mathrm{wall}}\). Computational steering allows us to observe the lower separation area and trial integration with respect to distance from the wall. Live adjustments of the blower control steering parameters suggest that low values of UB velocity mean, i.e., \(<1.43 \%\) total diffuser mass flow rate, produce negligible reduction in the upper recirculation area. High values, \(>2.85 \%\), result in fully attached flow, indicate that additional velocity would be a poor use of flow mass. Similar testing of the LB mean produces an interval of \([ 0.00, \, 2.34 ]\). The LB mean is useful at small percentages too, because the diffuser geometry means that lower separation occurs only when the core flow is pulled up by large UB action. This tug of war effect can be seen in Figure 10. Finally, we decide to examine the interval \([0, \, 1]\) for blower position \(\varphi \). While a higher blower position improves this QoI, our study here is 2D and incompressible; hence, we stay conservative in our design space constraints.
5 Software tools for ensemble sensitivity analysis
In Sect. 4.2, we employed immersive simulation to explore the design space of the 2D diffuser problem and to determine a QoI. Our next objective is to leverage this information to spawn an ensemble simulation. We first, in Sect. 5.1, provide background on global sensitivity analysis. Next, in Sects. 5.2 and 5.3, we present software useful for efficient ensemble generation and the application of UQ techniques, respectively.
5.1 Sensitivity analysis
Parameter sensitivity is central to achieving an optimal design and performing UQ. Through visualization of a solution subject to deviations from nominal parameter values in boundary conditions, material properties, or geometric parameters, a user can navigate the design space with greater efficacy and confidence. In variance-based sensitivity analysis, the variance of a given QoI is decomposed into fractions that are attributed to specific input parameters, or interactions of those parameters. Monte Carlo simulation is a popular candidate for obtaining sensitivity metrics, but can become infeasible for computationally demanding models. A suitable alternative is to use a UQ technique to approximate the QoI with an expansion in multivariate orthogonal polynomials, known as the polynomial chaos (PC) expansion [19, 55]. We next describe PC expansions followed by their application to global sensitivity analysis. We note that our PC expansion is described with random input variables general to the UQ field. Our implementation of the PC expansion treats design variables as uniform random variables.
5.1.1 Polynomial chaos expansions
We consider the scalar QoI, \(u(\varvec{\varXi })\), assumed to have finite variance, as a function of a d-dimensional vector of random inputs \(\varvec{\varXi } := (\varXi _1, \dots , \varXi _d )\) with joint probability density function \(f(\varvec{\xi })\). The PC expansion approximates the QoI as
where \(\psi _j(\varvec{\varXi })\) is a multivariate orthogonal polynomial evaluated at the random inputs and weighted by deterministic coefficients \(c_j\). The polynomials \(\psi _j(\varvec{\varXi })\) are chosen to be orthogonal with respect to the probability measure \(f(\varvec{\xi })\). For instance, if \(\varvec{\varXi }\) follows a jointly uniform or Gaussian distribution, then \(\psi _j(\varvec{\varXi })\) are multivariate Legendre or Hermite polynomials, respectively [55]. We assume \(\psi _j(\varvec{\varXi })\) are normalized, such that \({\mathbb {E}} [\psi ^2_j(\varvec{\varXi })] =1 \), where \({\mathbb {E}}[\cdot ]\) represents the mathematical expectation operator. The expansion is truncated to a finite number of terms as
An expansion with total order p and dimension d has \(P = \frac{(p+d)!}{p!d!}\) terms. As \(P \rightarrow \infty \), for a sufficiently smooth \(u(\varvec{\varXi })\), the PC expansion converges in the mean-square sense to u. The PC coefficients can be used to determine QoI statistics, construct a surrogate model, or perform sensitivity analysis. For instance, the QoI mean and variance can be computed from the PC expansion coefficients as \(\mu _{PC} = c_1\) and \(\sigma _{PC}^2 = \sum _{j=2}^P c_j^2\), respectively. To identify PC coefficients \(\mathbf{c}= ( c_1, \dots , c_P )^\mathrm{T}\) in (2), we generate realizations of \(\varvec{\varXi }\) denoted by \(\varvec{\xi }\). We seek to solve for \(\mathbf{c}\) in the linear system from N independent samples of \(\varvec{\xi }\) as
where
If the resulting regression problem is over-determined, with \(N>P\), we employ least-squares approximation [20, 23], whereas if it is under-determined, with \(N<P\), we apply compressed sensing [13, 14, 24, 36]. Compressed sensing methods are advantageous, because they reduce the number of sample evaluations to determine PC coefficients.
5.1.2 Global sensitivity analysis via PC expansions
The first-order Sobol’ indices, \(S_{\varXi _k}\), measure the effect of varying one parameter alone, \(\varXi _k\), averaged over the variations in other parameters. Total indices, \(S_{\varXi _k}^T\), refer to the variation in the QoI accounted for by one parameter and any interactions it has with other input parameters. In this work, we apply global sensitivity analysis analytically as a post-processing of PC expansion coefficients [44]. The first order Sobol’ indices are given by
where, \(I_k\) is a set of indices for which \(\psi _j(\varvec{\varXi })\), \(j=1,\dots ,P\), is a function of only \(\varXi _k\). Similarly, the total Sobol’ indices are given by
where \(I_k^T\) is a set of indices for which \(\psi _j(\varvec{\varXi })\), \(j=1,\dots ,P\), is a function of \(\varXi _k\) and any other inputs.
5.2 Ensemble generation via libEnsemble
In this work, we employ libEnsemble, an open-source Py-thon library developed at Argonne National Laboratory as part of the Department of Energy Exascale Computing Project to coordinate the concurrent evaluation of dynamic ensembles of calculations on massively parallel resources [25]. libEnsemble aims to achieve extreme scaling, resilience, task monitoring and resource recovery, portability, and flexibility, and exploit persistent data flow. The ensemble is coordinated via a manager/worker scheme that operates on several communication protocols.
libEnsemble is implemented through four components. The generator function \(gen_f\) produces values for simulations, the simulator function \(sim_f\) performs a simulation for given values from \(gen_f\), the allocation function determines whether \(gen_f\) or \(sim_f\) should be called, and the calling script defines the parameters for the previous three functions and executes libEnsemble. The libEnsemble user manual [25] provides more detail on each of these components, and various tutorials. In Fig. 11 we show an abbreviated version of the calling script. Note, in our application, we have no generator function, because \(sim_f\) reads inputs directly from a file. In the calling script, we specify the number of workers, and the number of simulations. For example, an HPC job may use 50 nodes in total, but require 2 nodes per simulation. In this case, the number of workers would be 25. In Fig. 11, we first setup the PHASTA executable. Next, we create an ID number for each simulation before defining parameters for the simulation and generation functions. An exit criterion is specified to terminate the ensemble when the maximum number of simulations is reached. Finally, the ensemble is launched. As simulations complete and workers become available new simulations are launched. Other ensemble manager tools are also available, for instance, UQ Pipeline [45].

Pseudocode of the libEnsemble calling script
5.3 Sensitivity analysis with chaospy
We use the Python library chaospy to perform UQ PC-based sensitivity analysis [16]. More generally, chaospy includes a suite of UQ methods such as low-discrepancy sampling, quadrature creation, polynomial manipulations, among others. A collection of Jupyter notebooks lets users explore the variety of chaospy applications.
We present pseudocode of the chaospy enabled sensitivity analysis in Fig. 12. The main idea is to construct a PC expansion and use the coefficients to calculate Sobol indices in Sects. 5.1.1 and 5.1.2, respectively. We note that in this pseudocode, we do not include the validation error. In practice, we recommend reserving \(\approx 20 \%\) of samples to compute the PC expansion validation error, and use this to calibrate the polynomial order p.

Pseudocode of the chaospy sensitivity analysis. Samples is an array of samples \(\{ \varvec{\xi }_{i}\}^N_{i=1}\), and evaluations are the corresponding simulated QoI \(\mathbf{u}\) from Eq. (4)
6 Numerical demonstration: ensemble simulation tools
We have now courtesy of an immersive simulation framework, established design space limits and confidence in our choice of QoI. We are also equipped with software tools to perform ensemble simulation and analyze the results. In this section, we demonstrate the utility of Catalyst during the collection of ensemble data, and carry out a global sensitivity analysis on the 2D aggressive subsonic diffuser.
6.1 Catalyst pipeline QoI extraction
The Catalyst library is successfully interfaced with PHA-STA via SENSEI to enable real-time QoI extraction. First, the PHASTA adaptor file is edited to include additional fields that facilitate QoI computation. This adaptor file determines the fields that are passed from the PHASTA solver to ParaView during a simulation. Next, PHASTA is built with SENSEI enabled and the updated adaptor file. Finally, a ParaView pipeline is saved to a Python co-processing script that is read during the PHASTA run at a specified frequency. The execution of the Catalyst co-processing step results in some computational overhead which we assess via a strong scalability study.
We performed a strong scalability study on the Argonne Leadership Computing Facility’s Theta computational resource with a \(\sim 2572\) K element mesh of the diffuser, partitioned to run on 6, 12, 24, and 48 cores, with 1 MPI process per core. Theta is a 11.69-petaflops Intel-Cray supercomputer. Each simulation computes 25 time steps, and saves output data at 2 step intervals. In Fig. 13, we plot the scalability study timing results for no write, conventional write, and Catalyst write cases. The results are computed as the average of three repetitions. No write denotes a PHASTA run that neither saves data to restarts or via the Catalyst pipeline. Conventional write indicates that a restart file containing the entire flow solution is written every 2 time steps. Catalyst write employs the Catalyst QoI pipeline to efficiently extract data every 2 time steps.
In Fig. 13, we plot the strong scalability factor, defined as
where t and nc are a given execution time and number of cores, and \(t_\mathrm{ref}\) and \(nc_\mathrm{ref}\) are the execution time and number of cores for the 6 core, no write, reference case. Optimal scaling would be a horizontal line with a scaling factor of 1. We observe in Fig. 13 that for all cases, the parallel overhead increases with number of cores. Importantly, while Catalyst write is marginally less efficient than not writing at all, its performance is comparable to the conventional write method.

Strong scalability study comparing the performance of no write, where no output data are saved, conventional write, where output data are written to restart files and Catalyst write where PHASTA is equipped with the Catalyst pipeline for efficient QoI extraction. We plot the strong scalability factor (7) calculated from the average of three repetitions of a 25 time step simulation with output data saved at every second step
In the traditional workflow approach, where the QoI calculation is performed as a post-processing step, the entire solution field must be saved at a given time step to a restart file of approximately 205 Mb. In the Catalyst write approach, the file containing the QoI is just 4 Kb, indicating a storage reduction of approximately 50000 times. These results demonstrate that the significant memory advantages of writing output data via the Catalyst pipeline come at minimal computational overhead. We note that, if a practitioner desires to continue the simulation in the Catalyst write approach, then they still are required to save a restart file; we do not address this disk usage in the present study.
6.2 Ensemble generation
We have enabled the straightforward evaluation of ensembles of PHASTA simulations through the implementation of the libEnsemble Python library described in Sect. 5.2 [25]. libEnsemble facilitates two levels of parallelism. In the first, an individual PHASTA simulation may employ numerous processors, in this demonstration, we partition a 241k element mesh and conduct each simulation with 24 processors. In the second, libEnsemble manages individual PHASTA evaluations and can launch new simulations immediately after previous simulations are finalized and resource becomes available. The user selects or provides functions to generate simulation input, carry out a simulation, and manage the ensemble of simulations. This setup allows the user to tailor libEnsemble to their specific solver requirements. For instance, to obtain an ensemble of PHASTA simulations, we create a custom simulation script that for a given input realization creates a run directory with the necessary geometry and restart files, reads the inputs from file, writes the inputs to the solver.inp script, and executes PHASTA.
We have developed and documented a set of PHASTA specific libEnsemble scripts and that enable the parallel evaluation of ensemble members, allowing much greater flexibility in job submission. libEnsemble with PHASTA has been implemented on local resources, and additionally on the Argonne Leadership Computing Facility’s Cooley cluster. Cooley has 126 compute nodes, each with 12 cores and 1 NVIDIA Tesla K80 GPU.
6.3 Global sensitivity analysis
We apply global sensitivity analysis via PC expansions, detailed in Sect. 5.1.2, to the 2D aggressive subsonic diffuser. Our objective is to understand the influence of the UB and LB velocities and the UB position on the length of the recirculation area (1). While the UB and LB provide us with flow control, the mass flow rate diverted to these blowers corresponds to a direct loss of thrust. Therefore, we want to determine a blower configuration that reduces the recirculation area while expending minimal diverted flow.
To explore the design space, we treat the UB and LB velocities and amplitudes and the UB position as uniform random variables. The variables and their respective intervals are summarized in Table 1. The limits were determined through computational steering via in situ exploration of the parameter space as described in 4.2. Figure 14 shows the PC-based Sobol indices constructed from 495 samples using polynomial order \(p=4\). The PC validation error was \(10.1 \%\). In Fig. 14, we see that the most influential parameter is the UB velocity mean, while the LB velocity amplitude has minimal effect on the QoI variance. The UB position \(\varphi \) also plays a significant role. Furthermore, it is apparent that the recirculation length is sensitive to the interactions between all the parameters. This matches our expectation given the tug of war dynamic between the upper and lower blowers over the core flow.

Global sensitivity analysis of the 2D aggressive subsonic diffuser. This study was carried out in Python with chaospy and an order \(p=4\) PC expansion from 495 samples with validation error \(10.1 \%\). The sum of the interactions and first order is the total order
We plot in Fig. 15 the entire ensemble in terms of mass cost and recirculation length, colored by the sampled input parameters. We exclude \(A_L\) (see Table 1) from Fig. 15 due to its small sensitivity found in Fig. 14. Mass cost is computed simply as the sum of the UB and LB mean velocities. Consequently, it is no surprise that in Fig. 15a, c we find that increasing the mean mass flow rates is correlated with higher mass cost. However, this increase in mass is correlated with our aim of reducing the recirculation length. The best-performing samples are those that produce the smallest recirculation length while expending the least mass. In general, these samples correspond to higher blower positions, as illustrated in Fig. 15d. While Fig. 15d implies that moving the blower position even further downstream may achieve better results, we refrain from doing this given the severe simplifications of this study, namely incompressible and 2D flow. Future work could transition examination of the blower position into 3D and compressible flow.

Ensemble members in terms of mass cost and recirculation length colored by different input parameters. The chosen optimal flow configuration is circled in red
We select a sample, identified by a red circle in Fig. 15, as flow configuration that yields low recirculation length and minimizes mass cost. This configuration reduces the recirculation length to 0, at a mass cost of approximately \(4.5\%\) the core mass flow. In Fig. 16, we compare our chosen flow configuration to the diffuser with no active flow control. The time-averaged stream-wise velocity is plotted. We observe in Fig. 16a that the recirculation area, outlined in black, is very large. In Fig. 16b, the core flow has been bent upwards by the action of the UB and the recirculation area is reduced to 0.

Influence of active flow control on the recirculating region showing a no flow control and b the best performing configuration found via an ensemble of simulations. The recirculation region is outlined in black
7 Conclusions
In this work, we introduce an immersive simulation software framework that enables practitioners to evade many of the typical workflow inefficiencies in solving systems of PDEs. We describe the in situ interface SENSEI and infrastructure Catalyst and provide software linkages to show their interaction with the PDE solver. In addition, we demonstrate the use of complementary ensemble simulation software tools libEnsemble, for intuitive evaluation of simulation ensembles, and chaospy, for straightforward implementation of UQ techniques.
We demonstrate the efficacy of this immersive simulation framework on a 2D diffuser problem in the PHASTA flow solver. With SENSEI and Catalyst, we implement computational steering on the diffuser problem, including parametric geometry deformation, that allows for rapid design space exploration and eliminates the need of writing data to disk. We show that using a Catalyst pipeline to save output QoI requires minimal computational overhead, scales well, and reduces memory demands by approximately 50000 times.
A global sensitivity analysis integrates all the immersive simulation components together. Computational steering allows the practitioner to test input parameters’ influence, guide the selection of appropriate parameter limits, and determine a useful QoI. The ensemble evaluation with lib-Ensemble is fast, intuitive, and takes full advantage of massively parallel resources. Moreover, the saving of output QoI with pre-constructed Catalyst pipeline drastically reduces the total memory footprint. Finally, we use chaospy to calculate Sobol’ indices and determine the optimal diffuser configuration.
Our future research includes a plethora of advancements to immersive simulation capabilities. While the application of UQ techniques as a post-processing analysis is useful, the ability to establish sample limits during computational steering and launch ensembles interactively from within Para-View GUI would lead to yet more rapid insight extraction. In this work, we provide a proof of concept for parametric geometry deformation that is designed specifically for this problem’s geometry. More general geometric deformation tools are an interesting line of inquiry.
Availability of data and materials
The datasets generated during and/or analyzed during the current study have been uploaded to the GitHub page.
Code availability
The software used in this study has been made available and is published at the GitHub page www.github.com/SimNautilus/nautilusFlow.
References
Ahrens J, Geveci B, Law C (2005) Paraview: an end-user tool for large data visualization. Visualization Handbook 717(8)
ANSYS (2016) ANSYS Fluent - CFD Software | ANSYS. http://www.ansys.com/products/fluids/ansys-fluent. Accessed 18 Jan 2021
Asghar A, Stowe RA, Allan WDE, Alexander D (2017) Entrance aspect ratio effect on S-Duct inlet performance at high-subsonic flow. J Eng Gas Turbines Power 139(5), 052602. https://doi.org/10.1115/1.4035206
Ayachit U, Bauer A, Geveci B, O’Leary P, Moreland K, Fabian N, Mauldin J (2015) Paraview catalyst: enabling in situ data analysis and visualization. In: Proceedings of the First Workshop on in situ infrastructures for enabling extreme-scale analysis and visualization, pp 25–29
Ayachit U, Bauer A, Duque EP, Eisenhauer G, Ferrier N, Gu J, Jansen KE, Loring B, Lukic Z, Menon S, et al. (2016) Performance analysis, design considerations, and applications of extreme-scale in situ infrastructures. In: SC’16: Proceedings of the International Conference for high performance computing, networking, storage and analysis, IEEE, pp 921–932
Ayachit U, Whitlock B, Wolf M, Loring B, Geveci B, Lonie D, Bethel EW (2016) The sensei generic in situ interface. In: 2016 Second Workshop on in situ infrastructures for enabling extreme-scale analysis and visualization (ISAV), IEEE, pp 40–44
Bauer AC, Abbasi H, Ahrens J, Childs H, Geveci B, Klasky S, Moreland K, O’Leary P, Vishwanath V, Whitlock B et al (2016) In situ methods, infrastructures, and applications on high performance computing platforms. Comput Graph Forum 35:577–597 (Wiley Online Library)
Buice CU, Eaton JK (1996) Experimental investigation of flow through an asymmetric plane diffuser. CTR Annu Res briefs 1996:243–248
Camata JJ, Silva V, Valduriez P, Mattoso M, Coutinho AL (2018) In situ visualization and data analysis for turbidity currents simulation. Comput Geosci 110:23–31
Chang TH, Larson J, Watson LT, Lux TC (2020) Managing computationally expensive blackbox multiobjective optimization problems wwth libensemble. In: 2020 Spring Simulation Conference (SpringSim), IEEE, pp 1–12
Childs H, Brugger E, Whitlock B, Meredith J, Ahern S, Pugmire D, Biagas K, Miller M, Harrison C, Weber GH, Krishnan H, Fogal T, Sanderson A, Garth C, Bethel EW, Camp D, Rübel O, Durant M, Favre JM, Navrátil P (2012) Visit: an end-user tool for visualizing and analyzing very large data. In: High Performance Visualization–Enabling Extreme-Scale Scientific Insight, pp 357–372
Constantine P, Howard R, Glaws A, Grey Z, Diaz P, Fletcher L (2016) Python active-subspaces utility library. J Open Source Softw 1(5):79
Diaz P, Doostan A, Hampton J (2018) Sparse polynomial chaos expansions via compressed sensing and d-optimal design. Comput Methods Appl Mech Eng 336:640–666
Doostan A, Owhadi H (2011) A non-adapted sparse approximation of pdes with stochastic inputs. J Comput Phys 230(8):3015–3034
Fabian N, Moreland K, Thompson D, Bauer AC, Marion P, Gevecik B, Rasquin M, Jansen KE (2011) The paraview coprocessing library: a scalable, general purpose in situ visualization library. In: 2011 IEEE Symposium on large data analysis and visualization, IEEE, pp 89–96
Feinberg J, Langtangen HP (2015) Chaospy: an open source tool for designing methods of uncertainty quantification. J Comput Sci 11:46–57
Foster I, Ainsworth M, Allen B, Bessac J, Cappello F, Choi JY, Constantinescu E, Davis PE, Di S, Di W, et al (2017) Computing just what you need: online data analysis and reduction at extreme scales. In: European Conference on parallel processing, Springer, pp 3–19
Fu J, Liu N, Sahni O, Jansen KE, Shephard MS, Carothers CD (2010) Scalable parallel i/o alternatives for massively parallel partitioned solver systems. In: 2010 IEEE International Symposium on parallel & distributed processing, Workshops and Phd Forum (IPDPSW), IEEE, pp 1–8
Ghanem RG, Spanos PD (1991) Stochastic finite element method: response statistics. In: Stochastic finite elements: a spectral approach. Springer, New York, NY, pp 101–119
Hadigol M, Doostan A (2018) Least squares polynomial chaos expansion: A review of sampling strategies. Comput Methods Appl Mech Eng 332:382–407
Haimes R, Dannenhoffer J (2013) The engineering sketch pad: a solid-modeling, feature-based, web-enabled system for building parametric geometry. In: 21st AIAA computational fluid dynamics conference, AIAA, p 3073
Haimes R, Jordan K (2001) A Tractable Approach to understanding the results from large-scale 3D transient simulations. In: 39th Aerospace Sciences Meeting and Exhibit, AIAA, p 918
Hampton J, Doostan A (2015) Coherence motivated sampling and convergence analysis of least squares polynomial chaos regression. Comput Methods Appl Mech Eng 290:73–97
Hampton J, Doostan A (2015) Compressive sampling of polynomial chaos expansions: convergence analysis and sampling strategies. J Comput Phys 280:363–386
Hudson S, Larson J, Wild SM, Bindel D, Navarro J-L (2019) libEnsemble Users Manual. Argonne National Laboratory. Revision 0.5.2. https://buildmedia.readthedocs.org/media/pdf/libensemble/latest/libensemble.pdf. Accessed 16 Dec 2019
Kuhlen T, Pajarola R, Zhou K (2011) Parallel in situ coupling of simulation with a fully featured visualization system. In: Proceedings of the 11th Eurographics Conference on parallel graphics and visualization (EGPGV), Eurographics Association Aire-la-Ville, Switzerland, vol 10, pp 101–109
Larsen M, Ahrens J, Ayachit U, Brugger E, Childs H, Geveci B, Harrison C (2017) The alpine in situ infrastructure: Ascending from the ashes of strawman. In: Proceedings of the In Situ Infrastructures on Enabling Extreme-Scale Analysis and Visualization (ISAV), pp 42–46
Le Maître O, Knio OM (2010) Spectral methods for uncertainty quantification: with applications to computational fluid dynamics. Springer Science & Business Media, Berlin
Li S, Marsaglia N, Garth C, Woodring J, Clyne J, Childs H (2018) Data reduction techniques for simulation, visualization and data analysis. Comput Graph Forum 37:422–447 (Wiley Online Library)
Liu N, Fu J, Carothers CD, Sahni O, Jansen KE, Shephard MS (2010) Massively parallel i/o for partitioned solver systems. Parallel Process Lett 20(04):377–395
Lofstead JF, Klasky S, Schwan K, Podhorszki N, Jin C (2008) Flexible io and integration for scientific codes through the adaptable io system (adios). In: Proceedings of the 6th International Workshop on challenges of large applications in distributed environments, pp 15–24
Longley JP, Greitzer EM (1992) Inlet distortion effects in aircraft propulsion system integration. In: AGARD LS-183, Steady and Transient Performance Prediction of Gas Turbine Engines, p 6-1–6-18
Mattoso M, Dias J, Ocana KA, Ogasawara E, Costa F, Horta F, Silva V, De Oliveira D (2015) Dynamic steering of hpc scientific workflows: a survey. Futur Gener Comput Syst 46:100–113
Mu D, Moran J, Zhou H, Cui Y, Hawkins R, Tatineni M, Campbell S (2019) In-situ analysis and visualization of earthquake simulation. In: Proceedings of the practice and experience in advanced research computing on rise of the machines (learning), pp 1–5
Obi S, Aoki K, Masuda S (1993) Experimental and computational study of turbulent separating flow in an asymmetric plane diffuser. In: Ninth Symposium on Turbulent Shear Flows, vol 305, pp 305–312
Peng J, Hampton J, Doostan A (2014) A weighted \(\ell _1\)-minimization approach for sparse polynomial chaos expansions. J Comput Phys 267:92–111
Peterka T, Bard D, Bennett JC, Bethel EW, Oldfield RA, Pouchard L, Sweeney C, Wolf M (2020) Priority research directions for in situ data management: enabling scientific discovery from diverse data sources. Int J High Perform Comput Appl 34(4):409–427
Pintas JT, de Oliveira D, Ocaña KA, Ogasawara E, Mattoso M (2013) Scilightning: a cloud provenance-based event notification for parallel workflows. In: International Conference on service-oriented computing, Springer, pp 352–365
Rasquin M, Smith C, Chitale K, Seol S, Matthews B, Martin J, Sahni O, Loy R, Shephard MS, Jansen KE (2014) Scalable fully implicit finite element flow solver with application to high-fidelity flow control simulations on a realistic wing design. Comput Sci Eng 16(6):13–21
Santos E, Tierny J, Khan A, Grimm B, Lins L, Freire J, Pascucci V, Silva CT, Klasky S, Barreto R, et al. (2009) Enabling advanced visualization tools in a web-based simulation monitoring system. In: 2009 Fifth IEEE International Conference on e-Science, IEEE, pp 358–365
Schroeder W, Martin KM, Lorensen WE (1998) The visualization toolkit an object-oriented approach to 3D graphics. Prentice-Hall, Inc.
Sederberg TW, Parry SR (1986) Free-form deformation of solid geometric models. In: Proceedings of the 13th annual conference on Computer graphics and interactive techniques. Association for Computing Machinery, New York, NY, pp 151–160
Souza R, Silva V, Coutinho AL, Valduriez P, Mattoso M (2020) Data reduction in scientific workflows using provenance monitoring and user steering. Futur Gener Comput Syst 110:481–501
Sudret B (2008) Global sensitivity analysis using polynomial chaos expansions. Reliab Eng Syst Saf 93(7):964–979
Tannahill J, Lucas DD, Domyancic D, Brandon S, Klein R (2011) Data intensive uncertainty quantification: applications to climate modeling. In: Proceedings of the 2011 High Performance Computing Networking, Storage and Analysis Conference. Association for Computing Machinery, New York, NY
Tchoua R, Klasky S, Podhorszki N, Grimm B, Khan A, Santos E, Silva C, Mouallem P, Vouk M (2010) Collaborative monitoring and analysis for simulation scientists. In: 2010 International Symposium on collaborative technologies and systems, IEEE, pp 235–244
Tennøe S, Halnes G, Einevoll GT (2018) Uncertainpy: a python toolbox for uncertainty quantification and sensitivity analysis in computational neuroscience. Front Neuroinform 12:49
Thompson D, Fabian ND, Moreland KD, Ice LG (2009) Design issues for performing in situ analysis of simulation data. Technical Report SAND2009-2014, Sandia National Laboratories pp 7–18
Vishwanath V, Hereld M, Morozov V, Papka ME (2011) Topology-aware data movement and staging for i/o acceleration on blue gene/p supercomputing systems. In: SC’11: Proceedings of 2011 International Conference for high performance computing, networking, storage and analysis, IEEE, pp 1–11
Wang C, Duan Q, Tong CH, Di Z, Gong W (2016) A gui platform for uncertainty quantification of complex dynamical models. Environ Model Softw 76:1–12
Wetterer-Nelson C, Jansen KE, Evans JA (2021) Interactive geometry modification of high performance finite element simulations. in progress
Whiting CH, Jansen KE (2001) A stabilized finite element method for the incompressible Navier-Stokes equations using a hierarchical basis. Int J Numer Meth Fluids 35(1):93–116
Whitlock BJ, Laganella C, Duque EP (2021) Scoreboard: management and creation of in situ and in transit data extractions via computational steering. In: AIAA Scitech 2021 Forum, AIAA, p 1599
Xiu D (2010) Numerical methods for stochastic computations. Princeton University Press
Xiu D, Karniadakis GE (2002) The Wiener-Askey polynomial chaos for stochastic differential equations. SIAM J Sci Comput 24(2):619–644
Yi H, Rasquin M, Fang J, Bolotnov IA (2014) In-situ visualization and computational steering for large-scale simulation of turbulent flows in complex geometries. In: 2014 IEEE International Conference on Big Data (Big Data), IEEE, pp 567–572
Acknowledgements
The work was supported by National Science Foundation grant 1740330 (SSE) and Department of Energy under Grant No. DE-SC0021411 (FASTMath SciDAC). This research used resources of the Argonne Leadership Computing Facility, which is a DOE Office of Science User Facility supported under Contract DE-AC02-06CH11357 made available to our group under the DOE Aurora Early Science Program (Data and Learning). Ben Matthews provided valuable assistance. The SENSEI enhancements developed by Kitware were supported by the Office of Science, Office of Advanced Scientific Computing Research, of the U.S. Department of Energy under a subcontract from Lawrence Berkeley National Laboratory No. 7566608, through the grant “Scalable Analysis Methods and In Situ Infrastructure for Extreme Scale Knowledge Discovery.”
Funding
The work was supported by National Science Foundation Grant 1740330 (SSE) and Department of Energy under Grant No. DE-SC0021411 (FASTMath SciDAC).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Newberry, F., Wetterer-Nelson, C., Evans, J.A. et al. Software tools to enable immersive simulation. Engineering with Computers 38, 4697–4713 (2022). https://doi.org/10.1007/s00366-022-01714-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-022-01714-6