
Abstract
The present investigation is focused on the buckling behavior of strain gradient nonlocal beam embedded in Winkler elastic foundation. The first-order strain gradient model has been combined with the Euler–Bernoulli beam theory to formulate the proposed model using Hamilton’s principle. Three numerically efficient methods, namely Haar wavelet method (HWM), higher order Haar wavelet method (HOHWM), and differential quadrature method (DQM) are employed to analyze the buckling characteristics of the strain gradient nonlocal beam. The impacts of several parameters such as nonlocal parameter, strain gradient parameter, and Winkler modulus parameter on critical buckling loads are studied effectively. The basic ideas of the numerical methods, viz. HWM, HOHWM, and DQM are presented comprehensively. Also, a comparative study has been conducted to explore the effectiveness and applicability of all the three numerical methods in terms of convergence study. Finally, the results, obtained by this investigation, are validated properly with other works published earlier.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nowadays, numerical methods and algorithms have come to help the engineers and researchers to open the way for solving complex scientific problems such as molecular structural analysis, meteorology and weather forecasting, system dynamics, and many other essential topics. In general, numerical calculations use the practical results of computing to find new ways to analyze problems. In engineering problems, the analysis of structures using modern numerical methods is one of the most widely used problems [1].
More recently, the mechanical and structural analyses of nanostructures due to their widespread applications with the help of modern numerical methods has received much attention [2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25]. Among these numerical methods, the Haar wavelet method [26,27,28] and higher order Haar wavelet method [29, 30] and also differential quadrature method [31,32,33] are among the advanced numerical methods with excellent precision. The wavelet is a special series of functions that are now known as the first wavelet. This series was presented as the simplest type of the wavelet first introduced by Alfred Haar in 1909. Mathematically, the wavelet is a set of fixed piece functions that can approximate a function. Among the published papers, Hein and Feklistova [34] investigated Haar wavelets to study free vibrations of non-uniform and axially functionally graded beams under different boundary conditions. They transformed their equations based on the simplest wavelets. Their results were appropriately matched with the other presented works. Lepik [35] based on the Euler–Bernoulli beam model studied an elastic local beam containing a crack subjected to a longitudinal in-plane load based on the Haar wavelet method. His results proved the high accuracy of the Haar wavelet method. Kirs et al. [36] analyzed dynamically a nonlocal Euler–Bernoulli beam model based on the Haar wavelets. They also carried out three boundary conditions, namely pined–pined, clamped–clamped, and clamped–pined ones.
As it has been seen so far, the properties of materials such as their energy at the nanoscale vary with their large-scale state. However, the size reduction is a physical change, and it is not expected that the basic properties of the material will change with this physical change. This has made the nanoscale more attractive than other scales. Properties such as electrical conductivity, color, mechanical strength, and even weight can be changed at the nanoscale. For example, the conductivity of metals is well known. However, metals can be a semiconductor or even insulated on a nanoscale. Nanomaterials also have a much higher surface-to-volume ratio compared to bulk materials. This is a fundamental property that is extremely important in all processes that occur on the surface of the material (such as reactivity). So it can be stated that nano does not just mean a thousand times smaller than micro. Investigating the mechanical behavior of a nanostructure at the nanoscale is in dire need of a suitable theory that to date elasticity theory of nonlocal of Eringen [37,38,39,40,41,42], couple stress [43, 44] and strain gradient theories [45,46,47,48,49] predict the behavior of nanostructures extensively as a mechanical analysis under different conditions. However, in this study, the size-dependent effects have been described employing the nonlocal strain gradient theory, which is a combination of the Eringen’s nonlocal theory and the second-order Mindlin strain gradient theory, which can well show the effects of size reduction and atomic interaction [50, 51].
More recently, some researchers have focused on the main model of nonlocal strain gradient theory, namely its integral forms [52, 53]. As a matter of fact, both nonlocal and strain gradient terms instead of their differential models have been re-considered in their integral models. They have found that in some beam analyses, the results of differential models may be inconsistent with the integral ones’ results. In addition, in some valuable researches [54, 55], researchers have presented that while considering nonlocal elasticity theory of Eringen or nonlocal strain gradient approach, there have been more appropriate numerical outcomes if the effect of change in the thickness is investigated in the gradients of stress and strain, that is, although the effect of changes in the thickness has been ignored in the strains by researchers, the effect of size-dependent can be crucial in the thickness direction. Of some important conclusions within these studies, they showed that the thickness effect strengthens the c effect of nonlocal strain gradient theory and by ignoring the effect of thickness the stiffness-hardening effect is underestimated. In fact, the stiffness-hardening and stiffness-softening influences are affected by the length to thickness ratio when considering the thickness effect.
This research has come to consider profoundly and comprehensively various advanced numerical approaches, namely Haar wavelet method (HWM), higher order Haar wavelet method (HOHWM) and differential quadrature method (DQM) to analyze a nanobeam under mechanical stability situation. To this, the classical beam model is embedded in the energy formulation to extract the equilibrium equations and the strain gradient nonlocal model reformulates the obtained local equations to implement a nanoscale behavior in the problem. Moreover, the Winkler elastic matrix is assumed to be as an outer effect. Afterward, several diagrams are graphically plotted with the results of the HWM, HOHWM, and DQM for two boundary conditions, namely pined–pined and clamped–clamped ones to show the stability behavior of the modeled nanobeam.
2 Review of the strain gradient model
The stress field as per the first-order nonlocal strain gradient model [19, 50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68] is presented as
where \( \sigma_{xx}^{\diamondsuit } = \int\limits_{0}^{L} {E\alpha \left( {x,\,x^{\prime},\,e_{0} a} \right)} \,\varepsilon^{\prime}_{xx} \left( {x^{\prime}} \right)\,{\text{d}}x^{\prime} \) and \( \sigma_{xx}^{*} = l^{2} \int\limits_{0}^{L} {E\alpha^{*} \left( {x,\,x^{\prime},\,e_{1} a} \right)} \,\varepsilon^{\prime}_{xx,x} \left( {x^{\prime}} \right)\,{\text{d}}x^{\prime} \) denote the classical nonlocal stress tensor and the higher order nonlocal stress tensor, respectively. \( \alpha \left( {x,\,x^{\prime},\,e_{0} a} \right) \) and \( \alpha^{*} \left( {x,\,x^{\prime},\,e_{1} a} \right) \) are the nonlocal kernel, \( \varepsilon_{xx} \) and \( \varepsilon_{xx,x} \) represent the strain and gradient of strain, \( L \) and \( l \) are the length of nanobeam and material length-scale parameter, and \( e_{0} a \), and \( e_{1} a \) are the nonlocal parameters due to the higher order strain gradient stress field. Applying the nonlocal differential operator \( \left( {\ell_{i} = 1 - \left( {e_{i} a} \right)^{2} \nabla^{2} \,,\,i = 0,\,1} \right) \) on the stress field, viz. Eq. (1), the first-order strain gradient model for a one-dimensional elastic material is described as [53]
Considering \( e_{0} = e_{1} \), Eq. (2) is converted into [50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68]:
3 Formulation of proposed model
The displacement field of the Euler–Bernoulli beam at any point may be defined as [37]
where \( u_{1} ,\,u_{2} , \) and \( u_{3} \) represent displacements along \( x,\,y, \) and \( z \) directions, respectively, whereas \( u\,\left( {x,\,t} \right) \) and \( w\,\left( {x,\,t} \right) \) denote axial and transverse deflections of the point on the mid-plane of the beam. Using von Kármán hypothesis, the nonlinear strain–displacement relation may be expressed as
Hamilton’s principle for the conservative system is presented as
where \( U \) is the strain energy and \( W_{\text{e}} \) is the work done by the elastic foundation. The variations in strain energy and external work done are given as
where \( k_{\text{w}} \) is the Winkler modulus, \( \sigma_{xx} \) is the normal stress, \( N = \int\limits_{A} {\sigma_{xx} \,{\text{d}}A} , \) and \( M = \int\limits_{A} {\sigma_{xx} \,z\,{\text{d}}A} \) are axial force and bending moment, respectively. Substituting Eqs. (7) and (8) in Eq. (6) and setting \( \delta \prod = 0 \), we have
On simplification of Eq. (9) and taking \( N_{xx} = P \), the constitutive relation may be derived as
Multiplying Eq. (3) by \( z{\text{d}}A \) and integrating over \( A \), we have
where \( e_{0} \) and \( a \) denote material constant and internal characteristic length, respectively, \( I = \int\limits_{A} {z^{2} {\text{d}}A} \) is the second moment of inertia and \( E \) is Young’s modulus. Inserting Eq. (10) in Eq. (11), the nonlocal bending moment \( M_{xx}^{nl} \) can be changed into
Putting Eq. (12) in Eq. (10), and assuming \( w\,\left( {x,\,t} \right) = w_{0} \left( x \right)\sin \omega t \), the governing equation is given as
Now, using \( X = \frac{x}{L}, \) \( W = \frac{{w_{0} }}{L}, \) \( K_{\text{w}} = \frac{{k_{\text{w}} L^{4} }}{EI}, \) \( \hat{P} = \frac{{PL^{2} }}{EI} \) and \( \beta = \frac{l}{L} \) in Eq. (13), the normalizing form of governing equation may be derived as
4 Preliminaries
4.1 Haar wavelet
The Haar function can be expressed as [28,29,30, 35, 36, 69, 70]
where \( i = m + k + 1 \), where \( m = 2^{j} \) and \( k \) denote the maximum number of square waves and the position of the particular square wave in the interval \( \left[ {I_{1} ,\,\,\,I_{2} } \right] \). Also, \( \phi_{1} \left( i \right) = I_{1} + k\frac{{I_{2} - I_{1} }}{{2^{j} }} \)\( \phi_{2} \left( i \right) = I_{1} + \left( {2k + 1} \right)\frac{{I_{2} - I_{1} }}{{2^{j + 1} }} \), and \( \phi_{3} \left( i \right) = I_{1} + \left( {k + 1} \right)\frac{{I_{2} - I_{1} }}{{2^{j} }} \), where \( j \)\( \left( {j = 0,\,1,\, \ldots ,J\,} \right) \) and \( k \)\( \left( {k = 0,\,1,\, \ldots ,\,2^{j} - 1} \right) \) represent the dilatation and translation parameters of the wavelets, respectively. \( J \) is termed as maximal of resolution of the wavelets. The Haar function, presented in Eq. (15) is only valid if \( i \ge 2. \) For \( i = 1 \), \( h_{1} (x) = 1 \) for \( x \in \left[ {I_{1} ,\,\,\,I_{2} } \right] \) and 0 elsewhere.
The \( \kappa \)th integral of the Haar function (for \( i > 1 \)), presented in Eq. (1) can be derived analytically as [28,29,30, 35, 36, 69, 70]
For \( i = 1 \), we have \( \phi_{1} = I_{1} \), \( \phi_{2} = \phi_{3} = I_{2} \) and \( p_{\eta ,\,1} (t) = \frac{1}{\eta \,!}\left( {t - S} \right)^{\eta } \).
The collocation points are considered as [29, 35, 70]
\( H,\,P_{1} ,\,P_{2} ,\,P_{3} , \ldots ,P_{\kappa } \) are the Haar matrices of dimension \( 2^{J + 1} \) and the elements of these matrices are expressed by \( H\left( {i,\,\,k} \right) = h_{i} (x_{k} ) \) and \( P_{\kappa } \left( {i,\,\,k} \right) = p_{\kappa ,\,i} (x_{k} ) \).
4.2 Differential quadrature method
In the present investigation, Quan and Chang’s [71, 72] version of Differential Quadrature Method has been implemented. According to this approach, the derivatives of any function \( W(X) \) at a given discrete point \( i \) can be expressed as linear sums of functions at discrete grid points, which are demonstrated as [31,32,33]
where \( A_{ij} ,B_{ij} ,C_{ij} \), \( D_{ij} \), \( E_{ij} \) and \( F_{ij} \) are the weighting coefficient matrices, and \( N \) is the number of discrete grid points. Chebyshev–Gauss–Lobatto grid points have been used in this study which is defined as [31,32,33]
The weighting coefficient matrices can be computed using Lagrange interpolation by the following procedure [31,32,33].
For \( i \ne j, \)
for \( i = j \)
Other weighting coefficients of higher order derivatives can be produced by performing matrix multiplications as [31,32,33]
5 Implementation of HWM, HOHWM, and DQM in the proposed model
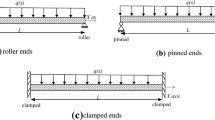
For the investigation of buckling behavior of stain gradient nonlocal beam, pined–pined (P–P), and clamped–clamped (C–C) boundary conditions are taken into consideration which is given as [58]
Pined–pined (P–P):
Clamped–clamped (C–C):
5.1 Haar wavelet method
According to HWM, the highest order derivative of the governing equation, viz. \( \frac{{{\text{d}}^{6} W}}{{{\text{d}}X^{6} }} \) in Eq. (14) can be expressed as [35, 36]
where \( N = 2^{J + 1} \). Performing sixth-time integration successively, we have
Here \( c = \left( {c_{1} ,\,c_{2} ,\,c_{3} , \ldots c_{N} } \right)^{\text{T}} \) and \( d_{1} ,\,d_{2} ,d_{3} ,\,d_{4} ,\,d_{5} , \) and \( d_{6} \) are integration constants which are different for particular boundary conditions. Substituting Eq. (29) with proper boundary condition, the governing Eq. (14) will be converted into an Eigenvalue problem as
where the Eigenvalue \( \hat{P} \) is the buckling load parameter.
Theorem 1
Let us assume a square-integrable, finite function \( \varphi (x) = \frac{{{\text{d}}^{n} \phi (x)}}{{{\text{d}}x^{n} }} \) in the interval \( \left[ {0,\,\,1} \right] \) and \( \exists \) \( \kappa \) such that \( \left| {\frac{{{\text{d}}\varphi (x)}}{{{\text{d}}x}}} \right| \le \kappa \), for all \( x \in \left[ {0,\,\,1} \right] \), then the HWM based on the discretized approach is convergent and the order of convergence is computed as two.
Proof
For the proof, one may see an interesting paper [73].□
5.2 Higher order haar wavelet method
From Theorem 1, it is found that the order of convergence of HWM is two. To improve the order of convergence, Majak et al. [30] proposed another approach. According to this technique, we have
where \( n \) is the highest order derivative and \( \tau \) is the extra term which is going to enhance the order of convergence of HOHWM. Assigning \( \tau = 1 \), \( n + 2 \) integration constants will be generated and the extra two integration constants can be handled using the algorithm presented in [30, 74].
Now setting \( \tau = 1 \) and following the procedures of HOHWM, we obtain
Integrating successively, we get
Here \( C = \left( {c_{1} ,\,c_{2} ,\,c_{3} , \ldots c_{N} } \right)^{T} \) and \( d_{1} ,\,d_{2} ,\,d_{3} ,\,d_{4} ,\,d_{5} ,\,d_{6} ,\,d_{7} \) and \( d_{8} \) are integration constants. Out of these eight constants, six can be obtained from each of the boundary condition, presented in Eqs. (26) and (27) whereas the rest two can also be obtained from the governing equation as
Plugging Eq. (31) in governing Eq. (14) and performing the procedures properly as mentioned in [30, 74], governing Eq. (14) will be converted into a generalized Eigenvalue problem as Eq. (30) where the Eigenvalues represent the buckling load parameters.
5.3 Differential quadrature method
Applying Eqs. (21–25) in Eqs. (26–27), the pined–pined (P–P) and clamped–clamped (C–C) boundary conditions are given as [19]
Pined–pined:
Clamped–clamped:
in which \( A,\,\bar{A},\,\bar{A}_{1} \) and \( \bar{A}_{2} \) are given as
Substituting Eq. (18) along with the above boundary conditions in Eq. (14), a generalized Eigenvalue problem will be formed.
6 Numerical results and discussion
Governing Eq. (14) has been solved by HWM, HOHWM, and DQM as an Eigenvalue problem using MATLAB codes developed by the authors. The critical buckling load parameter \( \left( {\hat{P}_{cr} } \right) \) also has been obtained for pined–pined and clamped–clamped boundary conditions with \( E = 1 \) TPa, \( L = 10 \) nm, and \( h = 1\,{\text{nm}} \).
6.1 Validation
The critical buckling loads, obtained by HWM, HOHWM, and DQM for both the PP and CC boundary conditions are validated with Wang et al. [75] assigning \( K_{\text{w}} = 0 \) and \( \beta = 0 \) whereas other parameters remain same as Wang et al. [75]. The comparisons of results are given in a graphical form which is illustrated in Fig. 1. The graphical results are drawn by varying the nonlocal parameter \( \left( {e_{0} a} \right) \) from 0 to 2 with an increase of 0.5. From Fig. 1, it is revealed that the results obtained by present methods are showing a decent agreement with the reference.

Validation of present results with [75]
6.2 Convergence study
Convergence studies are carried out for all the three methods, viz. HWM, HOHWM, and DQM concerning the critical buckling load. In this regard, pined–pined boundary condition has been considered for the study. The critical buckling loads are calculated with \( e_{0} a = 0.5 \), \( K_{\text{w}} = 50 \), \( \beta = 0.2 \), and \( L = 20 \). For HWM, the convergence is attained at \( J = 5 \) whereas, for HOHWM, the same results are obtained at \( J = 2 \). In the case of DQM, the results start converging at \( N = 8 \) or \( J = 2 \). These investigations are noted in Table 1 and Fig. 2. Also, the order of convergence for HWM and HOHWM are calculated based on the formula presented in [76], and it is found that the order of convergence is approximately two and four, respectively. It may also be noted that HOHWM converges as fast as DQM exhibiting its supremacy over HWM.

Convergence study of HWM, HOHWM, and DQM
6.3 Effect of nonlocal parameter
The impacts of nonlocal parameters \( \left( {e_{0} a} \right) \) are noted on the critical buckling load \( \left( {\hat{P}_{cr} } \right) \) and critical buckling load ratio in forms of tabular result and graphical plot. The critical buckling load ratio is defined as the ratio of critical buckling load parameter using nonlocal theory and critical buckling load parameter using classical theory. The results are calculated with \( K_{\text{w}} = 100 \), \( \beta = 0.1 \) and \( L = 10 \). Also, \( J = 8 \) for HWM, \( J = 4 \) for HOHWM, and \( N = 25 \) for DQM are taken in the computation. The nonlocal parameters \( \left( {e_{0} a} \right) \) are varying from 0 to 4 with an increment of 0.5. The results are demonstrated in Table 2 and Figs. 3 and 4. From these results, it is observed that the critical buckling load parameters are decreasing with an increase of \( \left( {e_{0} a} \right) \) for both the boundary conditions and this reduction in critical buckling load is more significant in case of clamped–clamped boundary condition.

a Critical buckling load versus nonlocal parameter, b critical buckling load ratio versus nonlocal parameter

Critical buckling load versus strain gradient parameter for PP case
6.4 Effect of strain gradient parameter
In this subsection, the response of the strain gradient parameter \( \left( \beta \right) \) on critical buckling load \( \left( {\hat{P}_{cr} } \right) \) has been noted with \( K_{\text{w}} = 200 \), and \( L = 10 \). Critical buckling loads are calculated for different nonlocal parameters \( \left( {e_{0} a} \right) \) by varying strain gradient parameter from 0 to 1 with an increment of 0.2. Critical buckling loads increase with the increase of strain gradient parameters, but this increase is much faster in case of clamped–clamped boundary conditions, which can be illustrated in Table 3 and Figs. 4 and 5. Also, critical buckling load is maximum in the case of classical theory with higher values of strain gradient parameters, and this trend is equal for both the boundary conditions.

Critical buckling load versus strain gradient parameter for CC case
6.5 Effect of Winkler modulus parameter
The impacts of Winkler modulus parameters \( \left( {K_{\text{w}} } \right) \) on critical buckling loads are studied through this subsection. The results are computed with \( e_{0} a = 1 \), and \( L = 10 \) by HOW, HOHWM, and DQM by considering \( J = 8 \), \( J = 4 \), and \( N = 20 \), respectively. Both the boundary conditions such as PP and CC are considered for the study by changing \( K_{\text{w}} \) from 0 to 500 with an increase of 100 for different values of strain gradient parameters. Both the graphical and tabular results are presented in Figs. 6 and 7, and Table 4. From these results, it can be concluded that the increase of Winkler modulus parameter increases the critical buckling load for both the boundary conditions. Also, this increases much higher in CC boundary condition with higher values of strain gradient parameters.

Critical buckling load versus Winkler modulus parameter for PP case

Critical buckling load versus Winkler modulus parameter for CC case
6.6 Buckling mode shape
Buckling mode shape is essential to predict the buckling characteristics of structural members. In this regard, mode shapes are plotted by considering the PP boundary condition with \( K_{\text{w}} = 100 \), \( \beta = 0.2 \) and \( L = 10 \). Mode shapes are plotted for different nonlocal parameters such as \( e_{0} a = 0,\,e_{0} a = 0.5 \) and \( e_{0} a = 1 \) which can be seen in Fig. 8. From this figure, it is found that the critical buckling loads are affected significantly by varying different scaling parameters.

Critical buckling mode shape for PP boundary condition
7 Concluding remarks
Buckling behavior of strain gradient nonlocal beam embedded in Winkler elastic foundation is studied using HWM, HOHWM, and DQM. The validation of the present model is conducted and found to be perfectly agreeing with the previously published article. A convergence study is also performed to exhibit the superiority of the methods. The responses of all the scaling parameters on critical buckling loads are also reported in terms of graphical and tabular results for both the boundary condition such as pined–pined and clamped–clamped. Followings are the main observations regarding the present investigation;
-
The HOHWM and DQM are converging much faster as compared to HWM. The order of convergence of HOHWM is found to be four, whereas the order of convergence of HWM is two.
-
The critical buckling loads are decreasing with an increase of nonlocal parameters for both the boundary condition and this reduction in critical buckling load is more significant in case of clamped–clamped boundary condition.
-
The critical buckling loads increase with the increase of strain gradient parameters, but this increase is much faster in case of clamped–clamped boundary conditions, and the critical buckling load is maximum in case of classical theory with higher values of strain gradient parameters, and this trend remains constant for both the boundary conditions.
-
An increase in Winkler modulus parameter increases the critical buckling load for both the boundary conditions, and this increase is much higher in CC boundary condition with higher values of strain gradient parameters.
References
Press WH, Tuekolsky SA, Wetterling WT (2002) Numerical recipes in C ++: the art of scientific computing. Cambridge University Press, Cambridge
Murmu T, Pradhan SC (2009) Buckling analysis of a single-walled carbon nanotubes embedded in an elastic medium based on nonlocal elasticity and Timoshenko beam theory and using DQM. Physica E 41(7):1232–1239
Ansari R, Arjangpay A (2014) Nanoscale vibration and buckling of single-walled carbon nanotubes using the meshless local Petrov–Galerkin method. Physica E 63:283–292
Chakraverty S, Behera L (2016) Static and dynamic problems of nanobeams and nanoplates, 1st edn. World Scientific Publishing Co, Singapore
Malikan M, Jabbarzadeh M, Dastjerdi Sh (2017) Non-linear static stability of bi-layer carbon nanosheets resting on an elastic matrix under various types of in-plane shearing loads in thermo-elasticity using nonlocal continuum. Microsyst Technol 23:2973–2991
Malikan M, Sadraee Far MN (2018) Differential quadrature method for dynamic buckling of graphene sheet coupled by a viscoelastic medium using Neperian frequency based on nonlocal elasticity theory. J Appl Comput Mech 4:147–160
Golmakani ME, Malikan M, Sadraee Far MN, Majidi HR (2018) Bending and buckling formulation of graphene sheets based on nonlocal simple first order shear deformation theory. Mater Res Express 5:065010
Ansari R, Sahmani S, Rouhi H (2011) Axial buckling analysis of single-walled carbon nanotubes in thermal environments via the Rayleigh–Ritz technique. Comput Mater Sci 50:3050–3055
Jena SK, Chakraverty S (2018) Free vibration analysis of variable cross-section single layered graphene nano-ribbons (SLGNRs) using differential quadrature method. Front Built Environ 4:63
Behera L, Chakraverty S (2015) Application of differential quadrature method in free vibration analysis of nanobeams based on various nonlocal theories. Comput Math Appl 69:1444–1462
Chakraverty S, Jena SK (2018) Free vibration of single walled carbon nanotube resting on exponentially varying elastic foundation. Curved Layer Struct 5:260–272
Bakhshi Khaniki H, Hosseini-Hashemi Sh, Nezamabadi A (2018) Buckling analysis of nonuniform nonlocal strain gradient beams using generalized differential quadrature method. Alex Eng J 57:1361–1368
Chen C, Li S, Dai L, Qian C-Z (2014) Buckling and stability analysis of a piezoelectric viscoelastic nanobeam subjected to van der Waals forces. Commun Nonlinear Sci 19:1626–1637
Tuna M, Kirca M (2017) Bending, buckling and free vibration analysis of Euler–Bernoulli nanobeams using Eringen’s nonlocal integral model via finite element method. Compos Struct 179:269–284
Jena SK, Chakraverty S (2018) Free vibration analysis of single walled carbon nanotube with exponentially varying stiffness. Curved Layer Struct 5:201–212
Ghavamian A, Öchsner A (2012) Numerical investigation on the influence of defects on the buckling behavior of single-and multi-walled carbon nanotubes. Physica E 46:241–249
Jena SK, Chakraverty S, Tornabene F (2019) Vibration characteristics of nanobeam with exponentially varying flexural rigidity resting on linearly varying elastic foundation using differential quadrature method. Mater Res Express 6:085051
Jena SK, Chakraverty S, Jena RM, Tornabene F (2019) A novel fractional nonlocal model and its application in buckling analysis of Euler–Bernoulli nanobeam. Mater Res Express 6:055016
Jena SK, Chakraverty S, Tornabene F (2019) Dynamical behavior of nanobeam embedded in constant, linear, parabolic, and sinusoidal types of Winkler elastic foundation using first-order nonlocal strain gradient model. Mater Res Express 6:60850f2
Jena RM, Chakraverty S, Jena SK (2019) Dynamic response analysis of fractionally damped beams subjected to external loads using homotopy analysis method. J Appl Comput Mech 5:355–366
Jena SK, Chakraverty S (2019) Differential quadrature and differential transformation methods in buckling analysis of nanobeams. Curved Layer Struct 6:68–76
Jena SK, Chakraverty S (2018) Free vibration analysis of Euler–Bernoulli Nano beam using differential transform method. Int J Comput Mater Sci Eng 7:1850020
Jena SK, Chakraverty S, Tornabene F (2019) Buckling behavior of nanobeams placed in electromagnetic field using shifted Chebyshev polynomials-based Rayleigh–Ritz method. Nanomaterials 9(9):1326
Jena SK, Chakraverty S, Jena RM (2019) Propagation of uncertainty in free vibration of Euler–Bernoulli nanobeam. J Braz Soc Mech Sci Eng 41(10):436
Jena SK, Chakraverty S (2019) Dynamic analysis of single-layered graphene nano-ribbons (SLGNRs) with variable cross-section resting on elastic foundation. Curved Layer Struct 6:132–145
Haar A (1910) Zur Theorie der orthogonalen Funktionensysteme (German). Mathematische Annalen 69:331–371
Hariharan G, Kannan K (2013) An overview of Haar wavelet method for solving differential and integral equations. World Appl Sci J 23:01–14
Majak J, Shvartsman B, Karjust K, Mikola M, Haavajõe A (2015) On the accuracy of the Haar wavelet discretization method. Compos Part B Eng 80:321–327
Jena SK, Chakraverty S (2019) Dynamic behavior of an electromagnetic nanobeam using the Haar wavelet method and the higher-order Haar wavelet method. Eur Phys J Plus 134:538
Majak J, Pohlak M, Karjust K, Eerme M, Kurnitski J, Shvartsman BS (2018) New higher order Haar wavelet method: application to FGM structures. Compos Struct 201:72–78
Shu C (2000) Differential quadrature and its application in engineering. Springer, Berlin
Bert CW, Malik M (1996) Differential quadrature method in computational mechanics: a review. Appl Mech Rev 49:1–28
Tornabene F, Fantuzzi N, Ubertini F, Viola E (2015) Strong formulation finite element method based on differential quadrature: a survey. Appl Mech Rev 67:020801
Hein H, Feklistova L (2011) Free vibrations of non-uniform and axially functionally graded beams using Haar wavelets. Eng Struct 33:3696–3701
Lepik Ü (2011) Buckling of elastic beams by the Haar wavelet method. Est J Eng 17:271–284
Kirs M, Mikola M, Haavajoe A, Ounapuu E, Shvartsman B, Majak J (2016) Haar wavelet method for vibration analysis of nanobeams. Waves Wavelets Fractals Adv Anal 2:20–28
Reddy JN (2007) Nonlocal theories for bending, buckling and vibration of beams. Int J Eng Sci 45:288–307
Malikan M, Tornabene F, Dimitri R (2018) Nonlocal three-dimensional theory of elasticity for buckling behavior of functionally graded porous nanoplates using volume integrals. Mater Res Express 5:095006
Thai S, Thai HT, Vo TP, Patel VI (2018) A simple shear deformation theory for nonlocal beams. Compos Struct 183:262–270
Zhu X, Wang Y, Dai H-H (2017) Buckling analysis of Euler–Bernoulli beams using Eringen’s two-phase nonlocal model. Int J Eng Sci 116:130–140
Tuna M, Kirca M (2016) Exact solution of Eringen’s nonlocal integral model for vibration and buckling of Euler–Bernoulli beam. Int J Eng Sci 107:54–67
Thai H-T (2012) A nonlocal beam theory for bending, buckling, and vibration of nanobeams. Int J Eng Sci 52:56–64
Malikan M (2017) Electro-mechanical shear buckling of piezoelectric nanoplate using modified couple stress theory based on simplified first order shear deformation theory. Appl Math Model 48:196–207
Akgöz B, Civalek Ö (2012) Free vibration analysis for single-layered graphene sheets in an elastic matrix via modified couple stress theory. Mater Design 42:164–171
Nematollahi MS, Mohammadi H (2019) Geometrically nonlinear vibration analysis of sandwich nanoplates based on higher-order nonlocal strain gradient theory. Int J Eng Sci 156:31–45
Malikan M, Nguyen VB, Tornabene F (2018) Damped forced vibration analysis of single-walled carbon nanotubes resting on viscoelastic foundation in thermal environment using nonlocal strain gradient theory. Eng Sci Technol Int J 21:778–786
Malikan M, Dimitri R, Tornabene F (2019) Transient response of oscillated carbon nanotubes with an internal and external damping. Compos Part B Eng 158:198–205
Wang J, Shen H, Zhang B, Liu J, Zhang Y (2018) Complex modal analysis of transverse free vibrations for axially moving nanobeams based on the nonlocal strain gradient theory. Physica E 101:85–93
She GL, Yan KM, Zhang YL, Liu HB, Ren YR (2018) Wave propagation of functionally graded porous nanobeams based on non-local strain gradient theory. Eur Phys J Plus 133:368
Mehralian F, Tadi Beni Y, Karimi Zeverdejani M (2017) Nonlocal strain gradient theory calibration using molecular dynamics simulation based on small scale vibration of nanotubes. Physica B 514:61–69
Malikan M, Nguyen VB, Dimitri R, Tornabene F (2019) Dynamic modeling of non-cylindrical curved viscoelastic single-walled carbon nanotubes based on the second gradient theory. Mater Res Express 6:075041
Zhu X, Li L (2017) Closed form solution for a nonlocal strain gradient rod in tension. Int J Eng Sci 119:16–28
Zhu X, Li L (2017) On longitudinal dynamics of nanorods. Int J Eng Sci 120:129–145
Tang H, Li L, Hu Y, Meng W, Duan K (2019) Vibration of nonlocal strain gradient beams incorporating Poisson’s ratio and thickness effects. Thin-Walled Struct 137:377–391
Li L, Tang H, Hu Y (2018) The effect of thickness on the mechanics of nanobeams. Int J Eng Sci 123:81–91
Li L, Hu Y (2015) Buckling analysis of size-dependent nonlinear beams based on a nonlocal strain gradient theory. Int J Eng Sci 97:84–94
Lim CW, Zhang G, Reddy JN (2015) A higher-order nonlocal elasticity and strain gradient theory and its applications in wave propagation. J Mech Phys Solids 78:298–313
Khaniki HB, Hosseini-Hashemi S (2017) Buckling analysis of tapered nanobeams using nonlocal strain gradient theory and a generalized differential quadrature method. Mater Res Express 4:065003
Li L, Hu Y (2015) Buckling analysis of size-dependent nonlinear beams based on a nonlocal strain gradient theory. Int J Eng Sci 97:84–94
Li L, Li X, Hu Y (2016) Free vibration analysis of nonlocal strain gradient beams made of functionally graded material. Int J Eng Sci 102:77–92
Li L, Hu Y (2017) Post-buckling analysis of functionally graded nanobeams incorporating nonlocal stress and microstructure-dependent strain gradient effects. Int J Eng Sci 120:159–170
Karami B, Shahsavari D, Li L (2018) Hygrothermal wave propagation in viscoelastic graphene under in-plane magnetic field based on nonlocal strain gradient theory. Physica E 97:317–327
Sahmani S, Fattahi AM, Ahmed NA (2019) Analytical mathematical solution for vibrational response of postbuckled laminated FG-GPLRC nonlocal strain gradient micro-/nanobeams. Eng Comput 35:1173–1189
Ebrahimi F, Barati MR, Civalek Ö (2019) Application of Chebyshev–Ritz method for static stability and vibration analysis of nonlocal microstructure-dependent nanostructures. Eng Comput. https://doi.org/10.1007/s00366-019-00742-z
Ebrahimi F, Karimiasl M, Mahesh V (2019) Chaotic dynamics and forced harmonic vibration analysis of magneto-electro-viscoelastic multiscale composite nanobeam. Eng Comput. https://doi.org/10.1007/s00366-019-00865-3
Malikan M, Nguyen VB (2018) Buckling analysis of piezo-magnetoelectric nanoplates in hygrothermal environment based on a novel one variable plate theory combining with higher-order nonlocal strain gradient theory. Physica E 102:8–28
Malikan M, Nguyen VB, Tornabene F (2018) Electromagnetic forced vibrations of composite nanoplates using nonlocal strain gradient theory. Mater Res Express 5:075031
Malikan M, Dimitri R, Tornabene F (2018) Effect of sinusoidal corrugated geometries on the vibrational response of viscoelastic nanoplates. Appl Sci 8:1432
Chen CF, Hsiao CH (1997) Haar wavelet method for solving lumped and distributed-parameter systems. IEE Proc Control Theory Appl 144:87–94
Lepik U (2012) Exploring vibrations of cracked beams by the Haar wavelet method. Estonian J Eng 18:58
Quan JR, Chang CT (1989) New insights in solving distributed system equations by the quadrature method—I. Analysis. Comput Chem Eng 13:779–788
Quan JR, Chang CT (1989) New insights in solving distributed system equations by the quadrature method—II. Numerical experiments. Comput Chem Eng 13:1017–1024
Majak J, Shvartsman BS, Kirs M, Pohlak M, Herranen H (2015) Convergence theorem for the Haar wavelet based discretization method. Compos Struct 126:227–232
Kirs M, Eerme M, Bassir D, Tungel E (2019) Application of HOHWM for vibration analysis of nanobeams. Key Eng Mater 799:230–235
Wang CM, Zhang YY, Ramesh SS, Kitipornchai S (2006) Buckling analysis of micro-and nano-rods/tubes based on nonlocal Timoshenko beam theory. J Phys D 39:3904
Shvartsman BS, Majak J (2016) Numerical method for stability analysis of functionally graded beams on elastic foundation. Appl Math Model 40:3713–3719
Acknowledgements
The first two authors are very much thankful to the Defence Research and Development Organization(DRDO), New Delhi, India (Sanction Code: DG/TM/ERIPR/GIA/17-18/0129/020) for the funding to carry out the present research work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Jena, S.K., Chakraverty, S. & Malikan, M. Implementation of Haar wavelet, higher order Haar wavelet, and differential quadrature methods on buckling response of strain gradient nonlocal beam embedded in an elastic medium. Engineering with Computers 37, 1251–1264 (2021). https://doi.org/10.1007/s00366-019-00883-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-019-00883-1