
Abstract
We construct a family \(\{\varPhi _t\}_{t\in [0,1]}\) of homeomorphisms of the two-torus isotopic to the identity, for which all of the rotation sets \(\rho (\varPhi _t)\) can be described explicitly. We analyze the bifurcations and typical behavior of rotation sets in the family, providing insight into the general questions of toral rotation set bifurcations and prevalence. We show that there is a full measure subset of [0, 1], consisting of infinitely many mutually disjoint non-trivial closed intervals, on each of which the rotation set mode locks to a constant polygon with rational vertices; that the generic rotation set in the Hausdorff topology has infinitely many extreme points, accumulating on a single totally irrational extreme point at which there is a unique supporting line; and that, although \(\rho (\varPhi _t)\) varies continuously with t, the set of extreme points of \(\rho (\varPhi _t)\) does not. The family also provides examples of rotation sets for which an extreme point is not represented by any minimal invariant set, or by any directional ergodic measure.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the theory of dynamics on manifolds, rotation vectors are used to describe the asymptotic motion of orbits: the magnitude of the rotation vector gives the speed of motion, and its direction gives the homology class which best approximates the motion. Rotation vectors in this form were introduced by Schwartzman [31] using invariant measures. A topological version was given by Fried [11], and an elegant synthesis was provided by Mather [23].
The set of all rotation vectors realized by the orbits of a particular dynamical system is called its rotation set, and gives a (perhaps coarse) invariant of the total dynamics. Given a class of dynamical systems, there are four natural questions one can ask about their rotation sets.
-
I. Shapes. Which sets can be realized as rotation sets?
-
II. Representatives. How much of the dynamics is revealed by the rotation set? Are there good dynamical representatives of every vector in the rotation set?
-
III. Bifurcations. How do rotation sets vary in parameterized families?
-
IV. Prevalence. What does the typical rotation set look like?
The answers to these questions are most completely understood for homeomorphisms of the circle (the classical case studied by Poincaré and Denjoy), for degree-one endomorphisms of the circle, and for homeomorphisms of the annulus isotopic to the identity. In this paper we study homeomorphisms \(\varPhi :{\mathbb {T}}^2\rightarrow {\mathbb {T}}^2\) of the two-dimensional torus which are isotopic to the identity. Given such a homeomorphism, fix a lift \({\tilde{\varPhi }}:{\mathbb {R}}^2\rightarrow {\mathbb {R}}^2\) to the universal cover. The motion of orbits of \(\varPhi \) is measured by the displacement cocycle \({\text {dis}}:{\mathbb {T}}^2\times {\mathbb {Z}}\rightarrow {\mathbb {R}}^2\) given by
which is independent of the choice \(\tilde{z}\) of lift of z. The rotation vector of a point \(z\in {\mathbb {T}}^2\) is given by
when this limit exists. The pointwise rotation set of \(\varPhi \) can then be defined by
The effect of changing the lift \({\tilde{\varPhi }}\) of \(\varPhi \) is to translate \(\rho _p(\varPhi )\) by an integer vector, but all of the torus homeomorphisms we consider will have natural preferred lifts, and we suppress this dependence.
The pointwise rotation set is difficult to work with a priori, and Misiurewicz and Ziemian [25] introduced the now standard definition of what we refer to as the Misiurewicz–Ziemian rotation set, which in most situations is easier to work with and has better properties:
For example, it is immediate from the definition that \(\rho _{\mathrm{MZ}}(\varPhi )\) is a compact subset of \({\mathbb {R}}^2\).
Misiurewicz and Ziemian also proved that \(\rho _{\mathrm{MZ}}(\varPhi )\) is convex, giving rise to a basic trichotomy: \(\rho _{\mathrm{MZ}}(\varPhi )\) is either a point, or a line segment, or has interior. Much of the early work on rotation sets focused on the third case, while in recent years there has been substantial progress on the first two cases. In this paper we consider only rotation sets \(\rho _{\mathrm{MZ}}(\varPhi )\) with interior.
Calculating the rotation set of a specific homeomorphism \(\varPhi \) is difficult in general. For this reason, most work has either concentrated on general properties of rotation sets, or on the careful construction of examples of homeomorphisms whose rotation sets have certain properties. In this paper we give what we believe to be the first construction of a nontrivial family \(\{\varPhi _t\}_{t\in [0,1]}\) of homeomorphisms whose rotation sets can be described explicitly. We classify and describe all of the (uncountably many) different rotation sets \(\rho _{\mathrm{MZ}}(\varPhi _{t})\) and their bifurcations with the parameter t. We are therefore able to give answers to the four questions above for the rotation sets in this family. In particular, the family yields the first new examples of rotation sets in the literature since the work of Kwapisz in the 1990s. We prove that, in fact, these new rotation sets are typical in the sense that they contain a residual set in the collection of all rotation sets in the family with the Hausdorff topology.
While the construction of the family is carried out in such a way as to make the calculation of rotation sets possible, it is not targeted to produce any particular behavior. The phenomena which we describe therefore occur naturally within the family. The systematic study of parametrized families of maps has led to enormous progress in the study of dynamical systems. The complete description given here of all the rotation sets in our family provides valuable insights into the possible structures and bifurcations of torus rotation sets and motivates questions and conjectures about the answers to the four questions in the general case: see Sect. 9.
We now give a summary of the main results of the paper, together with a description of some relevant results of other authors. In broad outline the rotation sets in the family conform with the well known behavior of the rotation numbers of generic families of circle homeomorphisms: for parameters that are buried points in a Cantor set \({\mathscr {B}}\subset [0,1]\), the rotation number is irrational, while in the closure of each complementary gap of \({\mathscr {B}}\) the rotation number mode locks at a rational value. The analog of rational rotation number for rotation sets is for the rotation set to be a polygon with rational vertices, while the analog of irrational rotation number is for the rotation set to have infinitely many extreme points, some of which are irrational.
Question I. Shapes. In order to describe the types of rotation set realized by the family, we need some definitions. An extreme point of a convex subset of the plane is called a vertex if it has multiple supporting lines, and a smooth point otherwise. A vertex is polygonal if it has a neighborhood in the rotation set which is isometric to the neighborhood of a vertex of a polygon. An irrational vector \({\mathbf {v}}=(v_1,v_2)\in {\mathbb {R}}^2\) is planar totally irrational if \(v_1\), \(v_2\), and 1 are rationally independent (i.e. if translation by \({\mathbf {v}}\) induces a minimal homeomorphism of the torus), and partially irrational otherwise.
There are three types of rotation set \(\rho _{\mathrm{MZ}}(\varPhi _t)\) (see Theorem 5):
-
Rational regular: The rotation set is a convex polygon with rational vertices (Fig. 1).
-
Irrational regular: The rotation set has infinitely many rational polygonal vertices, which accumulate on a single irrational extreme point (Fig. 2). This irrational extreme point can be either a vertex or a smooth point, and can be either partially or totally irrational.
-
Irrational exceptional: The rotation set has infinitely many rational polygonal vertices, which accumulate on two irrational extreme points (Fig. 3). The irrational extreme points are the endpoints of an exceptional interval in the boundary of \(\rho _{\mathrm{MZ}}(\varPhi _t)\), which has the property that, for all s, it is either contained in, or disjoint from, \(\rho _{\mathrm{MZ}}(\varPhi _s)\).
Polygons with rational vertices are the best understood type of rotation set. Kwapisz proved [20] that every rational polygon in the plane can be realized as \(\rho _{\mathrm{MZ}}(\varPhi )\) for some \(C^\infty \)-diffeomorphism \(\varPhi :{\mathbb {T}}^2\rightarrow {\mathbb {T}}^2\).
The first example of a rotation set having an irrational extreme point was also provided by Kwapisz [21]: he constructed a \(C^1\)-diffeomorphism whose rotation set has infinitely many rational polygonal vertices accumulating on two partially irrational vertices. As far as we are aware, our family provides the first examples of rotation sets with totally irrational extreme points in the literature (such rotation sets are in fact generic in the family, as discussed under question IV below). Crovisier and le Roux (personal communication) have previously constructed such an example starting, like Kwapisz’s construction, with Denjoy examples on the circle.
Question II. Representatives. The simplest version of this question has an affirmative answer for every homeomorphism in the family: for every \({\mathbf {v}}\in \rho _{\mathrm{MZ}}(\varPhi _t)\), there is some \(z\in {\mathbb {T}}^2\) with rotation vector \({\mathbf {v}}\), so that \(\rho _p(\varPhi _t) = \rho _{\mathrm{MZ}}(\varPhi _t)\) (see Theorem 5).
Given this, the next question is whether or not every \({\mathbf {v}}\in \rho _{\mathrm{MZ}}(\varPhi _t)\) is represented by an entire compact invariant set, ideally one which looks like the invariant set of the rigid rotation of the torus induced by translation by \({\mathbf {v}}\). Here the answer is less straightforward, and we require some definitions.
A minimal set D for a torus homeomorphism \(\varPhi \) is called a \({\mathbf {v}}\)-minimal set if every element of D has rotation vector \({\mathbf {v}}\). For a rigid rotation by \({\mathbf {v}}\), we have that \({\text {dis}}(z,r) - r{\mathbf {v}}= 0\) for all \(z\in {\mathbb {T}}^2\) and \(r\in {\mathbb {N}}\). If this quantity is uniformly bounded over all z in an invariant subset Z of \({\mathbb {T}}^2\) and all \(r\in {\mathbb {N}}\), then Z is said to have bounded deviation. A \({\mathbf {v}}\)-minimal set with bounded deviation is called a \({\mathbf {v}}\)-rotational set. Jäger [15] showed that a \({\mathbf {v}}\)-rotational set is indeed dynamically similar to rigid rotation: if \({\mathbf {v}}\) is irrational, then a \({\mathbf {v}}\)-rotational set is always semi-conjugate to rigid translation on either the torus (if \({\mathbf {v}}\) is totally irrational) or the circle (if \({\mathbf {v}}\) is partially irrational).
When \({\mathbf {v}}\) is rational, a theorem of Franks [10] states that there is a periodic point z with \(\rho (z) = {\mathbf {v}}\): in particular, its orbit is a \({\mathbf {v}}\)-rotational set. It follows from a result of Parwani [29] that this periodic orbit can be chosen to have the same topological type as a periodic orbit of the rigid rotation induced by translation by \({\mathbf {v}}\).
Misiurewicz and Ziemian [26] show that every \({\mathbf {v}}\) in the interior of the rotation set of an arbitrary homeomorphism is represented by a \({\mathbf {v}}\)-rotational set; and that there exist homeomorphisms \(\varPhi \) for which \(\rho _{\mathrm{MZ}}(\varPhi )\) is a polygon with rational vertices, with the property that some vectors \({\mathbf {v}}\) on the boundary of \(\rho _{\mathrm{MZ}}(\varPhi )\) are not represented by any \({\mathbf {v}}\)-minimal set.
In view of these results, the only question remaining concerns the existence of dynamical representatives of irrational points \({\mathbf {v}}\) in the boundary of \(\rho _{\mathrm{MZ}}(\varPhi _t)\). The answer to this question depends on the type of the rotation set (see Theorem 9).
-
Rational regular: Every \({\mathbf {v}}\in \rho _{\mathrm{MZ}}(\varPhi _t)\) is represented by a \({\mathbf {v}}\)-rotational set.
-
Irrational regular: Every \({\mathbf {v}}\in \rho _{\mathrm{MZ}}(\varPhi _t)\) except perhaps for the irrational extreme point is represented by a \({\mathbf {v}}\)-rotational set. The irrational extreme point is always represented by a uniquely ergodic \({\mathbf {v}}\)-minimal set, but this set sometimes does not have bounded deviation.
-
Irrational exceptional: Every \({\mathbf {v}}\in \rho _{\mathrm{MZ}}(\varPhi _t)\) except for elements of the exceptional interval P is represented by a \({\mathbf {v}}\)-rotational set. There are no \({\mathbf {v}}\)-minimal sets for any \({\mathbf {v}}\in P\): however, there is a minimal set D such that \(\rho _{\mathrm{MZ}}(D,\varPhi _t) = P\), where \(\rho _{\mathrm{MZ}}(D,\varPhi _t)\) is defined as in (1) but with the sequence \((z_i)\) in D. As a consequence, \(\varPhi _t|_D\) is not uniquely ergodic, and in fact it has exactly two ergodic invariant Borel measures. Irrational exceptional homeomorphisms therefore provide examples in which there is an extreme point \({\mathbf {v}}\) of the rotation set with the property that the support of its representing ergodic measure contains points whose rotation vector differs from \({\mathbf {v}}\). Such measures are called lost in the terminology of Geller and Misiurewicz [13] (cf. [16, 17]).
The relationship between these results and recent work of Addas-Zanata [2] and Le Calvez and Tal [22] is also worth noting: see Remark 9(c).
Question III. Bifurcations. The bifurcation set \({\mathscr {B}}\subset [0,1]\), on which \(\rho _{\mathrm{MZ}}(\varPhi _t)\) is not locally constant, is a Cantor set of Lebesgue measure zero. The set of rational regular parameters is the union of the closures of the complementary gaps of \({\mathscr {B}}\), with different gaps corresponding to different rational polygonal rotation sets. Irrational parameters are buried points of \({\mathscr {B}}\): both irrational regular and irrational exceptional parameters are dense in \({\mathscr {B}}\).
A theorem of Misiurewicz and Ziemian [26] guarantees that \(\rho _{\mathrm{MZ}}(\varPhi _t)\) varies continuously (in the Hausdorff topology) with t. Tal and Zanata pointed out that Hausdorff continuity of the set of extreme points of \(\rho _{\mathrm{MZ}}(\varPhi _t)\) is a stronger property, and asked whether the family \(\{\varPhi _t\}\) has this stronger property. It does not: the map from t to the set of extreme points of \(\rho _{\mathrm{MZ}}(\varPhi _t)\) is discontinuous exactly at irrational exceptional parameters, and at the right hand endpoints of the complementary gaps of \({\mathscr {B}}\) (see Theorem 5).
The first example of discontinuity of the set of extreme points of a rotation set with interior was constructed by Tal (personal communication).
Question IV. Prevalence. From the point of view of the parameter t, the typical rotation set is a rational polygon: this is the rational regular case, which occurs in the union of the closures of the complementary gaps of \({\mathscr {B}}\), that is, on a full measure set which contains an open dense subset of [0, 1]. This is in accord with a result of Passeggi [30] which states that the \(C^0\)-typical torus homeomorphism has a rotation set that is a (perhaps degenerate) rational polygon.
An alternative point of view on the relative abundance of the various types of rotation set is provided by examining the collection of all rotation sets in the family with the Hausdorff topology. This space is homeomorphic to a compact interval \({\mathscr {R}}\). Each of the three types of rotation set is dense in \({\mathscr {R}}\). However the typical rotation set (in the sense that the collection of such rotation sets contains a dense \(G_\delta \) subset of \({\mathscr {R}}\)) is of irrational regular type, having an irrational extreme point which is both totally irrational and smooth (see Theorem 5).
2 Outline of the paper
The family \(\{\varPhi _t\}\) is constructed from a family \(\{f_t\}\) of continuous self-maps of the figure eight space, in such a way that the rotation sets of \(\varPhi _t\) and \(f_t\) agree for all t. The rotation sets of the maps \(f_t\) can in turn be described in terms of digit frequency sets of associated symbolic \(\beta \)-shifts, which were analysed in [7].
We will therefore study rotation sets in three different contexts: torus homeomorphisms, maps of the figure eight space, and symbolic \(\beta \)-shifts. In Sect. 3 we briefly cover relevant definitions and results from general rotation theory. Necessary results from [7] about digit frequency sets are summarized in Sect. 4.
In Sect. 5 the family \(\{f_t\}\) is constructed, and the rotation sets \(\rho _{\mathrm{MZ}}(f_t)\) are calculated. Theorem 3 is the main statement about the structure of these rotation sets (and hence about the structure of the rotation sets \(\rho _{\mathrm{MZ}}(\varPhi _t)=\rho _{\mathrm{MZ}}(f_t)\)).
In Sect. 6 we use a theorem from [5] to unwrap the family \(\{f_t\}\) to the family of torus homeomorphisms \(\{\varPhi _t\}\). Results about dynamical representatives are contained in Sect. 7 (dealing with symbolic \(\beta \)-shifts) and Sect. 8 (dealing with the families \(\{f_t\}\) and \(\{\varPhi _t\}\)). Finally, in Sect. 9, we pose some questions motivated by the phenomena observed in the family.
For each \(n\ge 3\), similar techniques can be used to construct families of homeomorphisms of the n-torus \({\mathbb {T}}^n\) whose rotation sets behave analogously to those of the family \(\{\varPhi _t\}\): see Remark 4.
The rotation set \(\rho _{\mathrm{MZ}}(\varPhi _t)\) can be calculated explicitly for each value of the parameter t, using the algorithm given in [7] for determining digit frequency sets. In the irrational case, this means that the sequences of (rational) extreme points around the boundary of \(\rho _{\mathrm{MZ}}(\varPhi _t)\), moving either clockwise or counterclockwise from the extreme point (0, 0), can be listed as far as computational accuracy permits. Figure 1 depicts the rational regular rotation set at \(t=3/4\), which is a quadrilateral with vertices (0, 0), (2 / 3, 0), (3 / 5, 1 / 5), and (0, 1 / 2) (the dotted lines indicate the rotation set \(\rho _{\mathrm{MZ}}(\varPhi _1)\), which has extreme points (0, 0), (1, 0) and (0, 1 / 2)). Figure 2 depicts an irrational regular rotation set at \(t\simeq 0.4093\), with a single limiting extreme point which is smooth and totally irrational (the generic case). Finally, Fig. 3 depicts an irrational exceptional rotation set at \(t\simeq 0.0811\), which has two limiting irrational extreme points bounding an exceptional interval.

The rational regular rotation set \(\rho _{\mathrm{MZ}}(\varPhi _{3/4})\)

An irrational regular rotation set at \(t\simeq 0.4093\)

An irrational exceptional rotation set at \(t\simeq 0.0811\)
3 Preliminaries
3.1 Convex subsets of \({\mathbb {R}}^n\)
We start by fixing some terminology and notation associated with compact convex subsets of \({\mathbb {R}}^n\), since there is considerable variance in the literature.
\({\mathscr {H}}({\mathbb {R}}^n)\) will denote the set of all non-empty compact subsets of \({\mathbb {R}}^n\) with the Hausdorff topology. The convex hull, topological boundary, and interior of an element \(\varLambda \) of \({\mathscr {H}}({\mathbb {R}}^n)\) will be denoted \({\text {Conv}}(\varLambda )\), \({\text {Bd}}(\varLambda )\), and \({\text {Int}}(\varLambda )\) respectively.
A point \({\mathbf {v}}\) of \({\text {Bd}}(\varLambda )\) is said to be extreme if \(\varLambda -\{{\mathbf {v}}\}\) is also a convex set; the set of all extreme points of \(\varLambda \) will be denoted \({\text {Ex}}(\varLambda )\). A point \({\mathbf {v}}\in {\text {Ex}}(\varLambda )\) is a polyhedral vertex if \({\text {Bd}}(\varLambda )\) is locally isometric to the vertex of a polytope at \({\mathbf {v}}\). A limit extreme point is a limit point of \({\text {Ex}}(\varLambda )\).
In the case \(n=2\), a point \({\mathbf {v}}\in {\text {Ex}}(\varLambda )\) is said to be smooth if \(\varLambda \) has a unique supporting line at \({\mathbf {v}}\); and to be a vertex otherwise.
3.2 Rotation theory
In order to determine the rotation sets of the family \(\{\varPhi _t\}\) of torus homeomorphisms, we will also need to study the collection of all averages of observables on two other dynamical systems: symbolic \(\beta \)-shifts, and continuous maps of the figure eight space. This study was termed rotation theory by Misiurewicz [24]. In this section we summarize the basic definitions and results which we will need.
Let Z be a compact metric space, with dynamics given by a continuous map \(g:Z\rightarrow Z\). We will be interested in asymptotic averages of a bounded and Borel measurable observable \(\phi :Z\rightarrow {\mathbb {R}}^k\). To this end, we define an associated dynamical cocycle over g, denoted \(\phi _g:Z\times {\mathbb {N}}\rightarrow {\mathbb {R}}^k\), by
The Birkhoff average of the observable, when it exists, is given by
and the pointwise rotation set of g with respect to the observable \(\phi \) is defined by
Misiurewicz and Ziemian [25] gave an alternative definition of the rotation set, which takes into account asymptotic averages along subsequences:
It is evident that \({\text {rot}}_{\mathrm{MZ}}(Z, g, \phi )\) is compact, whereas \({\text {rot}}_p(Z, g, \phi )\) need not be.
Let \({\mathscr {M}}(g)\) denote the set of g-invariant Borel probability measures on Z, and \({\mathscr {M}}_e(g)\) the subset of ergodic measures. Given \(\mu \in {\mathscr {M}}(g)\), we write \({\text {rot}}(\mu ,g,\phi ) = \int \phi \;d\mu \) for the \(\mu \)-average of \(\phi \). The measure rotation set and ergodic measure rotation set are defined by
There are inclusions
the former coming from the pointwise ergodic theorem. We shall also use that
The proof of the following lemma, which relates the different definitions of the rotation set in the case of continuous observables, uses arguments and techniques from [25] which carry over without substantial change to the more general context considered here. Brief details are provided for the reader’s convenience. We write R(g) for the set of recurrent points of g: that is, the set of points \(z\in Z\) with the property that \(g^{r_i}(z)\rightarrow z\) for some sequence \(r_i\rightarrow \infty \).
Lemma 1
(Misiurewicz and Ziemian) Let Z be a compact metric space, and suppose that \(g:Z\rightarrow Z\) and \(\phi :Z\rightarrow {\mathbb {R}}^k\) are continuous.
-
(a)
For each extreme point \({\mathbf {v}}\) of \({\text {Conv}}({\text {rot}}_{\mathrm{MZ}}(Z, g, \phi )),\) there is some \(\mu \in {\mathscr {M}}_e(g)\) with \({\mathbf {v}}={\text {rot}}(\mu ,g,\phi ).\) In particular, there is a point \(z\in R(g)\) with \({\hat{\phi }}_g(z)={\mathbf {v}}.\)
-
(b)
If \({\text {rot}}_{p}(Z, g, \phi )\) is convex, then
$$\begin{aligned} {\text {rot}}_{m}(Z, g, \phi ) = {\text {rot}}_{p}(Z, g, \phi ) = {\text {rot}}_{\mathrm{MZ}}(Z, g, \phi ). \end{aligned}$$ -
(c)
$$\begin{aligned} {\text {Conv}}({\text {rot}}_p(R(g), g, \phi )) = {\text {Conv}}({\text {rot}}_{\mathrm{MZ}}(Z,g,\phi )). \end{aligned}$$
In particular, if W is a g-invariant subset of Z containing R(g), and \({\text {rot}}_p(W, g, \phi )\) is convex, then
$$\begin{aligned} {\text {rot}}_p(W, g, \phi ) = {\text {rot}}_{\mathrm{MZ}}(Z, g, \phi ). \end{aligned}$$
Proof
The first statement of (a) is proved in exactly the same way as Theorem 2.4 of [25], and the second statement follows from the pointwise ergodic theorem and Poincaré recurrence.
Part (b) follows from the observation that, if \({\text {rot}}_p(Z,g,\phi )\) is convex, then
where the first inclusion comes from taking convex hulls in (2) and using (3) and the convexity of \({\text {rot}}_p(Z,g,\phi )\); the second comes from (2); the third is trivial; and the last comes from part (a), the convexity of \({\text {rot}}_m(Z,g,\phi )\), and the fact that, since \({\text {rot}}_{\mathrm{MZ}}(Z,g,\phi )\) is a compact subset of \({\mathbb {R}}^k\), \({\text {Conv}}({\text {rot}}_{\mathrm{MZ}}(Z,g,\phi ))\) is equal to the convex hull of its extreme points.
For the first statement of (c), we have that \({\text {Conv}}({\text {rot}}_{\mathrm{MZ}}(Z,g,\phi )) \subset {\text {Conv}}({\text {rot}}_p(R(g),g,\phi ))\) by part (a). The reverse inclusion holds because \({\text {rot}}_p(R(g),g,\phi ) \subset {\text {rot}}_p(Z,g,\phi ) \subset {\text {rot}}_{\mathrm{MZ}}(Z,g,\phi )\). In particular, if \(R(g)\subset W\subset Z\) and \({\text {rot}}_p(W,g,\phi )\) is convex, then
so that \({\text {rot}}_{\mathrm{MZ}}(Z,g,\phi )\) is also convex, and the second statement follows. \(\square \)
Two observables \(\phi ,\psi :Z\rightarrow {\mathbb {R}}^k\) (and their cocycles \(\phi _g\) and \(\psi _g\)) are said to be cohomologous with respect to g if there is a bounded measurable function \(b:Z\rightarrow {\mathbb {R}}^k\) satisfying
(in other contexts additional regularity conditions are imposed on b, but here boundedness suffices). This is equivalent (see Theorem 2.9.3 of [18]) to the existence of a constant C with
If \(\phi \) and \(\psi \) are cohomologous then it is immediate from (4) that \({\text {rot}}_m(Z,g,\phi ) = {\text {rot}}_m(Z,g,\psi )\); and from (5) that \({\text {rot}}_p(Z,g,\phi ) = {\text {rot}}_p(Z,g,\psi )\) and \({\text {rot}}_{\mathrm{MZ}}(Z,g,\phi )={\text {rot}}_{\mathrm{MZ}}(Z,g,\psi )\).
Suppose that \(g:Z\rightarrow Z\) is semi-conjugate to \(f:Y\rightarrow Y\) by the surjective function \(h:Z\rightarrow Y\), so that \(h\circ g = f\circ h\). Then any observable \(\phi :Y\rightarrow {\mathbb {R}}^k\) on Y can be pulled back to the observable \(\psi = \phi \circ h\) on Z, and \(\phi _f(h(z),r) = \psi _g(z,r)\) for all \(z\in Z\) and \(r\in {\mathbb {N}}\). Since h is surjective, it follows that
We will need to understand how rotation sets transform under a very simple example of an induced (or return) map. Suppose that \(W\subset Z\), and that there is a natural number K with the property that, for every \(z\in Z\), there is some r with \(1\le r\le K\) such that \(g^r(z)\in W\). Define an observable \(N:W\rightarrow {\mathbb {R}}\) taking values in \(\{1,2,\ldots ,K\}\), by
and let the return map \(R:W\rightarrow W\) be given by \(R(w) = g^{N(w)}(w)\).
Given an observable \(\phi :Z\rightarrow {\mathbb {R}}^k\), define a corresponding observable \(\varPhi :W\rightarrow {\mathbb {R}}^k\) by \(\varPhi (w) = \phi _g(w, N(w))\). Then for all \(w\in W\) and \(r\in {\mathbb {N}}\) we have \( \varPhi _R(w,r) = \phi _g(w,N_R(w,r))\).
Since N is bounded, it follows that the Birkhoff average \({\hat{\phi }}_g(w)\) exists if and only if the limit \(\lim _{n\rightarrow \infty } \varPhi _R(w,n)/N_R(w,n)\) exists, and in this case the two are equal. Since, moreover, the g-orbit of every point of Z enters W, we have
The following lemma uses this to calculate \({\text {rot}}_p(Z,g,\phi )\) explicitly in the simple case of interest here.
Lemma 2
In the situation above, suppose that there is an observable \(\beta :W\rightarrow \varDelta \subset {\mathbb {R}}^\ell \) for some compact convex set \(\varDelta ;\) and that there are linear maps \(L:{\mathbb {R}}^\ell \rightarrow {\mathbb {R}}^k\) and \(M:{\mathbb {R}}^\ell \rightarrow {\mathbb {R}}\) such that \(\varPhi = L\circ \beta \) and \(N = M\circ \beta \). Let \(Q:{\mathbb {R}}^\ell \rightarrow {\mathbb {R}}^k\) be given by \(Q({\mathbf {v}}) = L({\mathbf {v}})/M({\mathbf {v}}),\) and suppose that \(Q|_\varDelta \) is injective. Then
Proof
By linearity of L and M we have \(\varPhi _R(w,r) = L(\beta _R(w,r))\) and \(N_R(w,r) = M(\beta _R(w,r))\) for all \(w\in W\) and \(r\in {\mathbb {N}}\). Therefore, by (7), \({\text {rot}}_p(Z,g,\phi )\) is the set of all limits of the form \(\lim _{r\rightarrow \infty } Q(\beta _R(w,r))\); or, equivalently, since Q is homogeneous of degree 0, the set of all limits of the form \(\lim _{r\rightarrow \infty } Q(\beta _R(w,r)/r)\). On the other hand, \({\text {rot}}_p(W,R,\beta ) \subset \varDelta \) is the set of all limits of the form \(\lim _{r\rightarrow \infty } \beta _R(w,r)/r\). Since \(Q|_\varDelta \) is injective and continuous, it is a homeomorphism onto its image, and the result follows. \(\square \)
4 Digit frequency sets of \(\beta \)-shifts
In this section we state some results from [7] about the possible frequencies of symbols (or digits) which can arise for elements of symbolic \(\beta \)-shifts.
Let \(\Sigma ^+=\{0,1,2\}^{\mathbb {N}}\) be the one-sided sequence space over the digits 0, 1, and 2, ordered lexicographically and endowed with the product topology; and let \(\sigma :\Sigma ^+\rightarrow \Sigma ^+\) be the shift map.
An element \(\underline{w}\) of \(\Sigma ^+\) is said to be maximal if \(w_0 = 2\) and \(\sigma ^r(\underline{w})\le \underline{w}\) for all \(r\ge 0\). Let \(\mathrm {Max}\subset \Sigma ^+\) denote the set of all maximal sequences. For each \(\underline{w}\in \mathrm {Max}\), the symbolic \(\beta \)-shift associated to \(\underline{w}\) is the subshift \(\sigma :B(\underline{w})\rightarrow B(\underline{w})\), where
The (continuous) observable of interest is \(\kappa :\Sigma ^+ \rightarrow {\mathbb {R}}^3\), defined by \(\kappa (\underline{w}) = {\mathbf e}_{w_0}\) where \(\{{\mathbf e}_0, {\mathbf e}_1, {\mathbf e}_2\}\) is the standard basis of \({\mathbb {R}}^3\). Therefore \({\hat{\kappa }}_\sigma (\underline{w})\in \varDelta \) gives the asymptotic frequency of the digits in \(\underline{w}\), if it exists. Here
is the standard 2-simplex.
The collection of digit frequencies realized in the symbolic \(\beta \)-shift \(B(\underline{w})\) is
We write
for the set of all digit frequency sets, equipped (anticipating Theorem 1(a) below) with the Hausdorff topology and ordered by inclusion.
A vector \({\mathbf {v}}\in \varDelta \) is called irrational if \({\mathbf {v}}\not \in {\mathbb {Q}}^3\); and is called totally irrational if there is no non-zero \(\mathbf {n}\in {\mathbb {Z}}^3\) with \(\mathbf {n}\cdot {\mathbf {v}}= 0\).
The following theorem is a summary of results from [7] (see Corollary 17 and Theorems 27, 33, 37, 38, 51, and 54 of that paper).
Theorem 1
-
(a)
\({\text {DF}}(\underline{w})\) is a compact, convex subset of \(\varDelta \) for all \(\underline{w}\in \mathrm {Max}\).
-
(b)
The map \({\text {DF}}:\mathrm {Max}\rightarrow {\mathscr {D}}\) is continuous and non-decreasing.
-
(c)
There is a partition \(\mathrm {Max}= M_1 \sqcup M_2 \sqcup M_3\) with the following properties :
-
(i)
If \(\underline{w}\in M_1,\) then \({\text {DF}}(\underline{w})\) is a polygon with rational vertices and there is an interval \(I_{\underline{w}}=[u(\underline{w}), v(\underline{w})]\subset M_1\) in \(\mathrm {Max},\) with \({\text {DF}}(\underline{w})={\text {DF}}(\underline{w}')\) if and only if \(\underline{w}'\in I_{\underline{w}}.\)
-
(ii)
If \(\underline{w}\in M_2,\) then \({\text {Ex}}({\text {DF}}(\underline{w}))\) consists of infinitely many rational polyhedral vertices together with a single irrational limit extreme point.
-
(iii)
If \(\underline{w}\in M_3,\) then \({\text {Ex}}({\text {DF}}(\underline{w}))\) consists of infinitely many rational polyhedral vertices together with two irrational limit extreme points, which are endpoints of a line segment in \({\text {Bd}}({\text {DF}}(\underline{w}))\).
-
(iv)
Each of \(M_2\) and \(M_3\) is uncountable, and if \(\underline{w}\in M_2\cup M_3\) then \(\underline{w}\) is not eventually periodic, and \({\text {DF}}(\underline{w})\not ={\text {DF}}(\underline{w}')\) for all \(\underline{w}'\not =\underline{w}\).
-
(v)
The bifurcation set
$$\begin{aligned} M_2 \cup M_3 \cup \bigcup _{\underline{w}\in M_1}\{u(\underline{w}), v(\underline{w})\} \end{aligned}$$is a Cantor set.
-
(i)
-
(d)
\({\mathscr {D}}\) is order-preserving homeomorphic to a compact interval, and each \({\text {DF}}(M_i)\) is dense in \({\mathscr {D}}\).
-
(e)
There is a dense \(G_\delta \) subset of \({\mathscr {D}},\) contained in \({\text {DF}}(M_2),\) consisting of digit frequency sets whose limit extreme point is smooth and totally irrational.
-
(f)
The map \({\text {Ex}}\circ {\text {DF}}:\mathrm {Max}\rightarrow {\mathscr {H}}(\varDelta )\) is discontinuous at each point of \(M_3\) and at \(v(\underline{w})\) for each \(\underline{w}\in M_1;\) and is continuous elsewhere.
Remark 1
\({\text {DF}}(\underline{w}) = {\text {rot}}_p(B(\underline{w}), \sigma , \kappa ) = {\text {rot}}_{\mathrm{MZ}}(B(\underline{w}), \sigma , \kappa ) = {\text {rot}}_m(B(\underline{w}), \sigma , \kappa )\) by part (a) of the theorem and Lemma 1(b).
5 Rotation sets of a family of maps of the figure eight space
5.1 The family of maps \(f_t:X\rightarrow X\)
Let \(X=S_1\vee S_2\) be a wedge of two oriented circles \(S_1\) and \(S_2\), with respective lengths 5 and 3, meeting at a vertex v. We use the orientation to define an order on each of the circles: if x and y belong to the same circle \(S_i\), then we say that \(x\le y\) if the oriented arc of \(S_i\) from v to y contains x.
Subdivide the circles \(S_1\) and \(S_2\) into five and three oriented compact subintervals (edges) of length 1, so that they can be written as edge-paths (see Fig. 4)
(the motivation for this labelling is that the images of edges will be orientation-preserving or orientation-reversing according as they are denoted with upper or lower case letters). Define a map \(f:X\rightarrow X\) homotopic to the identity, which expands each edge uniformly by a factor of either 5 or 3 (depending on whether its image is \(S_1\) or \(S_2\)), with the oriented edge images given by
where \(S_i^{-1}\) denotes the circle \(S_i\) traversed with reversed orientation. See the upper part of Fig. 4, in which the circles \(S_1\) and \(S_2\) are drawn horizontally and vertically respectively, and the images of each circle have been separated for clarity.

The maps \(f:X\rightarrow X\) and \(f_t:X\rightarrow X\)
Let p denote the common endpoint of the edges \(E\) and \(e\). The parameterized family of maps \(f_t:X\rightarrow X\) is defined by “cutting off” the tip of the transition \(E\,e\mapsto S_1\,S_1^{-1}\), as depicted in the lower part of Fig. 4: it is an analog of the stunted tent family on the interval which, in contrast to the standard tent family, is full. Define \(\ell ,r:[0,1]\rightarrow X\) so that \(\ell (t)\) and r(t) are the points of \(E\) and \(e\) respectively which are distance \((5-3t)/10\) from p: thus \(f(\ell (t))=f(r(t))\) for all \(t; f(\ell (0))\) is the fixed point of f in \(D\); and \(f(\ell (1)) = p\). Then for each \(t\in [0,1]\), let \(I_t=[\ell (t),r(t)]\subset S_1\). The maps \(f_t:X\rightarrow X\) are defined for \(t\in [0,1]\) by
Points of X can be assigned (perhaps multiple) itineraries under \(f_t\) belonging to the set
in the standard way: an element \(\underline{k}\) of \(\Sigma _8^+\) is an \(f_t\)-itinerary of \(x\in X\) if and only if \(f_t^r(x)\in k_r\) for each \(r\in {\mathbb {N}}\). (The condition that \(k_{r+1}\in \{A,B,b\}\) if and only if \(k_r\in \{A,C,c\}\) comes from the transitions specified in (9).) A point x has more than one \(f_t\)-itinerary if and only if its orbit under \(f_t\) passes through an endpoint of one of the defining intervals.
Every \(\underline{k}\in \Sigma _8^+\) is an f-itinerary of a unique \(x\in X\), by the standard argument: the sets of points of X which have an f-itinerary agreeing with \(\underline{k}\) to r symbols form a decreasing sequence of non-empty compact sets, whose diameter goes to zero because of the expansion of f.
5.2 Rotation sets of the maps \(f_t\)
Let \(p:\tilde{X}\rightarrow X\) be the universal Abelian cover of X, which we represent as \(\tilde{X}= ({\mathbb {R}}\times {\mathbb {Z}})\cup ({\mathbb {Z}}\times {\mathbb {R}}) \subset {\mathbb {R}}^2\), with the coordinates chosen so that \(p({\mathbb {R}}\times {\mathbb {Z}}) = S_1\) and \(p({\mathbb {Z}}\times {\mathbb {R}}) = S_2\). For each \(t\in [0,1]\), let \(\tilde{f}_t:\tilde{X}\rightarrow \tilde{X}\) be the unique lift of \(f_t\) which fixes each integer lattice point.
The rotation set of \(f_t\) is defined using the continuous observable \(\gamma ^t:X\rightarrow {\mathbb {R}}^2\) defined by \(\gamma ^t(x) = \tilde{f}_t(\tilde{x}) - \tilde{x}\), where \(\tilde{x}\in \tilde{X}\) is an arbitrary lift of \(x\in X\): we will study the sets
(which will be shown in Theorem 3 below to be equal to \({\text {rot}}_{\mathrm{MZ}}(X, f_t, \gamma ^t)\) and to \({\text {rot}}_m(X,f_t,\gamma ^t)\)).
In order to calculate rotation sets using symbolic techniques, it is convenient to use a discrete version \(\varGamma :X\rightarrow {\mathbb {Z}}^2\subset {\mathbb {R}}^2\) of \(\gamma ^t\), defined (except at preimages of v) by
For each \((m,n)\in {\mathbb {Z}}^2\), let \(D(m,n)\subset \tilde{X}\) be the fundamental domain consisting of the points with coordinates \((m+x,n)\) for \(x\in [0,1)\) and \((m,n+y)\) for \(y\in [0,1)\). Then (again with the exception of preimages of v, for which the rotation vector is (0, 0)), if \(\tilde{x}\in D(m,n)\) then \(\tilde{f}_t(\tilde{x})\in D((m,n)+\varGamma (x))\), and hence \(\tilde{f}_t^r(\tilde{x})\in D((m,n)+\varGamma _{f_t}(x,r))\). It follows that \(\Vert \varGamma _{f_t}(x,r) - \gamma ^t_{f_t}(x,r)\Vert \) is uniformly bounded over \(t\in [0,1]\), \(x\in X\), and \(r\in {\mathbb {N}}\). Therefore \(\gamma ^t\) and \(\varGamma \) are cohomologous with respect to \(f_t\), and in particular \(\rho _8(t) = {\text {rot}}_p(X, f_t,\varGamma )\).
5.3 Invariant subsets
In order to compute the rotation sets \(\rho _8(t)\) we will make use of successively smaller \(f_t\)-invariant subsets of X which carry the entire rotation set, and we now introduce these subsets. For each \(t\in [0,1]\), write \(o(x,f_t) =\{f_t^r(x): r\ge 0\}\) for the orbit of x under \(f_t\). Let
the set of points whose orbits do not enter the interiors of the orientation reversing intervals or of the interval A. For each \(t\in [0,1]\) set
the maximal \(f_t\)-invariant set on which \(f_t=f\); and define
Then W, \(X_t\), and \(Y_t\) are compact subsets of X; and \(f_t\) and f are equal on \(X_t\) and \(Y_t\).
It is convenient to reduce the size of the intervals B, C, and \(D\) so as to remove common endpoints. Let \(B'\) and \(D'\) be the initial segments of B and D of length 4 / 5 (so \(f(B')=f(D') = C\cup \,c\,\cup D\cup E\)), and let \(C'\) be the segment of C with \(f(C')=B'\). Clearly if \(x\in W\) then \(o(x,f) \subset B'\cup C'\cup D'\cup E\).
Since every point x of \(Y_t \cap C'\) has \(f(x)\in B'\) and \(f^2(x)\in Y_t\cap S_1\), we can study the dynamics of \(f_t\) on \(Y_t\) using the first return map \(R_t:Z_t\rightarrow Z_t\) to the subset
of \(Y_t\). Define \(F:C'\cup D'\cup E\rightarrow X\) by \(F = f^2\) on \(C'\) and \(F = f\) on \(D'\cup E\); then \(R_t :Z_t\rightarrow Z_t\) is given by \(R_t = F|_{Z_t}\).
Define an itinerary map \(h_t:Z_t\rightarrow \Sigma ^+\) for \(R_t\) by
We emphasize again that, since \(Y_t\) and \(Z_t\) are subsets of \(X_t\), we have \(f_t=f\) on \(Y_t\), \(R_t = R_1 = F\) on \(Z_t\), and \(h_t=h_1\) on \(Z_t\).
Define
the set of parameters for which \(\ell (t)\in W\) and \(\ell (t)\) is the greatest point of \(S_1\) on its f-orbit. It follows that
Since \({\mathscr {L}}\) is evidently compact and \(\ell \) is affine, \({\mathscr {C}}\) is also compact. We can therefore define a function \(a:[0,1]\rightarrow {\mathscr {C}}\) by
Finally, let \(K:{\mathscr {C}}\rightarrow \Sigma ^+\) be the “kneading sequence” map defined by \(K(t) = h_1(\ell (t))\).
Lemma 3
-
(a)
\(Z_1\) is a Cantor set of Lebesgue measure zero, and \(h_1\) is an order-preserving topological conjugacy between \(R_1:Z_1\rightarrow Z_1\) and \(\sigma :\Sigma ^+\rightarrow \Sigma ^+\).
-
(b)
\({\mathscr {C}}\) has Lebesgue measure zero.
-
(c)
K is an order-preserving homeomorphism onto its image
$$\begin{aligned} K({\mathscr {C}}) = \{\underline{w}\in \mathrm {Max}:\underline{w}\ge 2\overline{1}\}, \end{aligned}$$where the overbar denotes infinite repetition.
-
(d)
Let \(t\in [0,1]\). Then \(Z_t = Z_{a(t)},\) and \(h_t\) is an order-preserving topological conjugacy between \(R_t:Z_t\rightarrow Z_t\) and the symbolic \(\beta \)-shift \(\sigma :B(K(a(t)))\rightarrow B(K(a(t)))\).
Proof
-
(a)
\(F:C'\cup D'\cup E\rightarrow X\) maps each of the three disjoint compact intervals \(C'\), \(D'\) and \(E\) affinely over all three of the intervals, with slope at least 5. Since \(Z_1\) is the set of points whose F-orbits are contained in these intervals, and \(R_1\) is the restriction of F to \(Z_1\), the result follows by standard arguments.
-
(b)
Since \(\ell \) is an affine map and \(\ell ({\mathscr {C}}) \subset Z_1\), the result follows from (a).
-
(c)
\(K=h_1\circ \ell \) is an order-preserving homeomorphism onto its image since both \(h_1\) and \(\ell \) are order-preserving, continuous, and injective, and \({\mathscr {C}}\) is compact. \(K({\mathscr {C}})\subset \mathrm {Max}\), since if \(\underline{w}= K(t)\) for some \(t\in {\mathscr {C}}\) then we have \(\sigma ^r(\underline{w}) = \sigma ^r(h_1(\ell (t)) = h_1(R_1^r(\ell (t))) = h_1(R_t^r(\ell (t))) \le h_1(\ell (t)) = \underline{w}\), using \(\ell (t)\in Z_t\) for \(t\in {\mathscr {C}}\). Moreover \(K(0) = 2\overline{1}\), since \(f(\ell (0))\) is the fixed point of f in \(D\), so that \(K(t)\ge 2\overline{1}\) for all \(t\in {\mathscr {C}}\). It therefore only remains to show that every maximal sequence \(\underline{w}\ge 2\overline{1}\) is in the image of K. Let \(\underline{k}\in \Sigma _8^+\) be the sequence obtained from \(\underline{w}\) by the substitution \(0\mapsto CB\), \(1\mapsto D\), and \(2\mapsto E\), and let \(x\in X\) be a point with itinerary \(\underline{k}\). Since \(K(0) = 2\overline{1} \le \underline{w}\le \overline{2} = K(1)\) we have \(x\in [\ell (0), \ell (1)]\), so that there is some \(t\in [0,1]\) with \(\ell (t) = x\). Then \(x\in Z_t\) by maximality of \(\underline{w}\), so that \(t\in {\mathscr {C}}\) and \(\underline{w}= K(t)\).
-
(d)
Since \(a(t)\le t\) we have \(Z_{a(t)}\subset Z_t\). To show equality, suppose for a contradiction that there is some \(x\in Z_t - Z_{a(t)}\). Since \(Z_t\) is compact and \(R_t\)-invariant, \(y = \sup \{R_t^r(x):r\ge 0\}\) is also an element of \(Z_t\), so that \(y\le \ell (t)\). Moreover, \(R_t^r(y)\le y\) for all \(r\ge 0\) by continuity of \(R_t\), so that \(y\in {\mathscr {L}}\) and hence \(y=\ell (t')\) for some \(t'\in {\mathscr {C}}\). On the other hand, \(y>\ell (a(t))\) since \(x\not \in Z_{a(t)}\). Therefore \(t'\in (a(t),t]\cap {\mathscr {C}}\), contradicting the definition of a(t). Since \(h_t=h_1|_{Z_t}\) and \(R_t = R_1|_{Z_t}\), it follows from part (a) that \(h_t\) conjugates \(R_t:Z_t\rightarrow Z_t\) and \(\sigma :h_t(Z_t)\rightarrow h_t(Z_t)\). We therefore need only show that \(h_t(Z_t) = B(K(a(t)))\). Now given \(x\in Z_1\) we have
$$\begin{aligned} x\in Z_t\iff & {} x\in Z_{a(t)} \\\iff & {} R_1^r(x) \le \ell (a(t)) \quad \text {for all } r\ge 0 \\\iff & {} \sigma ^r(h_1(x)) \le h_1(\ell (a(t))) \quad \text {for all } r\ge 0\\\iff & {} h_1(x)\in B(h_1(\ell (a(t)))) = B(K(a(t))). \end{aligned}$$Here the first equivalence is what we have just proved; the second is the definition of \(Z_{a(t)}\) (or, more particularly, of \(X_{a(t)}\)); the third follows from part (a); and the fourth is by the definition (8) of \(B(h_1(\ell (a(t))))\). Therefore \(h_1(Z_t) = B(K(a(t)))\), and so \(h_t(Z_t) = B(K(a(t)))\) as required, since \(h_t\) and \(h_1\) agree on \(Z_t\). \(\square \)
5.4 Calculation of the rotation sets \(\rho _8(t)\)
In this section we apply Lemma 3(d) to relate the rotation set \(\rho _8(t)\) to the digit frequency set \({\text {DF}}(K(a(t)))\), and use this relationship together with Theorem 1 to describe the collection of rotation sets \(\rho _8(t)\).
Theorem 2
Let \(t\in [0,1]\). Then \(\rho _8(t)= \varPi ({\text {DF}}(K(a(t)))),\) where \(\varPi :\varDelta \rightarrow {\mathbb {R}}^2\) is defined by
Remark 2
\(\varPi \) is a projective homeomorphism onto its image, with inverse \(\varPi ^{-1}:\varPi (\varDelta )\rightarrow \varDelta \) given by
Proof
We will prove in successive steps that
where \(\beta :Z_t\rightarrow \varDelta \subset {\mathbb {R}}^3\) is the observable which takes the values \({\mathbf e}_0\), \({\mathbf e}_1\), and \({\mathbf e}_2\) in the intervals C, \(D\), and \(E\) respectively. The first of these equalities, that \(\rho _8(t)={\text {rot}}_p(X,f_t,\varGamma )\), was established in Sect. 5.2.
Step 1: \({\text {rot}}_p(X, f_t, \varGamma ) = {\text {rot}}_p(X_t, f, \varGamma )\)
Suppose that \(x\in X - X_t\) and that \(\hat{\varGamma }_{f_t}(x)\) exists. We will find a point \(y\in X_t\) with \(\hat{\varGamma }_{f_t}(y) = \hat{\varGamma }_{f_t}(x)\). This will establish that \({\text {rot}}_p(X,f_t,\varGamma ) = {\text {rot}}_p(X_t,f_t, \varGamma )\), and the result follows since \(f=f_t\) on \(X_t\).
Since \(x\in X-X_t\) there is some \(r\in {\mathbb {N}}\) for which \(f_t^r(x)\in {(\ell (t), r(t))}\), and hence \(\hat{\varGamma }_{f_t}(x) = \hat{\varGamma }_{f_t}(\ell (t))\). If \(o(\ell (t),f_t) \cap {(\ell (t), r(t))}=\emptyset \) then we can take \(y=\ell (t)\in X_t\). Suppose, therefore, that there is some least \(r\ge 1\) with \(q_t:=f_t^r(\ell (t))\in {(\ell (t), r(t))}\). Then \(f_t(q_t) = f_t(\ell (t))\), so that \(q_t\) is a period r point of \(f_t\). Since \(f_t\) is locally constant at \(q_t\), we have \({\text {index}}(q_t, f_t^r) = +1\). Therefore \(q_t\) can be continued to fixed points \(q_s\) of \(f_s^r\) for s in a neighborhood of t. Since \(\hat{\varGamma }_{f_s}(q_s) = \widehat{\gamma ^s}_{f_s}(q_s)\) has rational coordinates with denominator at most r, and varies continuously with s, we have \(\hat{\varGamma }_{f_s}(q_s) = \hat{\varGamma }_{f_t}(x)\) for all s.
Let s be the smallest parameter for which the continuation \(q_s\) exists. Then \(q_s\) must be an endpoint of \(I_s\), so that \(q_s\in X_s \subset X_t\). Taking \(y=q_s\in X_t\) we have \(\hat{\varGamma }_{f_t}(y) = \hat{\varGamma }_{f_s}(q_s) = \hat{\varGamma }_{f_t}(x)\) as required, since \(f_t=f_s\) on \(X_s\).
Step 2: \({\text {rot}}_p(X_t, f, \varGamma ) = {\text {rot}}_p(Y_t, f, \varGamma )\)
Suppose that \(x\in X_t\) and that \(\hat{\varGamma }_f(x)\) exists. We will find a point \(y\in Y_t\) with \(\hat{\varGamma }_f(y)=\hat{\varGamma }_f(x)\), which will establish the result.
Let \(\underline{k}\in \Sigma _8^+\) be an itinerary of x, and let \(\underline{k}'\in \Sigma _8^+\) be obtained by replacing every occurrence of b, c, or \(e\) in \(\underline{k}\) with its orientation-preserving counterpart B, C, or \(E\). Let \(z\in X\) be a point with itinerary \(\underline{k}'\). Then we have
-
(a)
\(o(z,f) \subset A\cup B\cup C\cup D\cup E\);
-
(b)
\(\hat{\varGamma }_f(z) = \hat{\varGamma }_f(x)\); and
-
(c)
\(z\in X_t\).
Both (a) and (b) are obvious from the replacements which have been carried out. For (c), observe that for each r, the points \(f^r(x)\) and \(f^r(z)\) lie on the same circle \(S_1\) or \(S_2\). Moreover \(f^r(z)\le f^r(x)\). For suppose \(f^r(z)\not =f^r(x)\), and let \(s \ge 0\) be least such that \(k'_{r+s} \not = k_{r+s}\). Then \(f^{r+i}(z)\) and \(f^{r+i}(x)\) pass through the same orientation-preserving intervals for \(0\le i < s\), and \(f^{r+s}(z) < f^{r+s}(x)\).
It follows that \(f^r(z)\not \in {(\ell (t), r(t))}\) for all r; for otherwise we would have \(f^r(x)\in E\cup e- {(\ell (t), r(t))}\), and hence \(f^{r+1}(z)>f^{r+1}(x)\). Therefore \(z\in X_t\) as required.
To complete the proof of step 2 we need to remove all occurrences of the symbol A from \(\underline{k}'\). We can assume that there are infinitely many such, since otherwise we can take \(y=f^r(z)\) for some r large enough that \(\sigma ^r(\underline{k}')\) contains no symbol A, and then \(y\in Y_t\) with \(\hat{\varGamma }_f(y) = \hat{\varGamma }_f(z) = \hat{\varGamma }_f(x)\). We can also assume that \(\underline{k}'\) contains infinitely many symbols distinct from A, since otherwise \(\hat{\varGamma }_f(x) = (0,0)\) and we can choose \(y\in Y_t\) to have itinerary \(\overline{D}\).
Write
where each \(L_i\ge 1\) and the \(u_i\) are (possibly empty) words which do not contain the symbol A. Since \(\underline{k}'\) doesn’t contain the symbols b, c, and \(e\), there is a unique way to do this: each maximal subword of the form \(A^L\) must be preceded by C and followed by B, and the \(u_i\) are the subwords which separate the subwords \(C\,A^L\,B\).
Let \(\underline{k}''\) be the sequence obtained by replacing each word \(u_i\, C\, A^{L_i}\, B\) with the word
-
\(u_i\, C\, B\, D^{L_i}\) if \(u_i\) does not contain the symbol \(E\);
-
\(w_1\,D\, w_2\,E\, C\,B\,D^{L_i-1}\) if \(u_i = w_1\,E\,w_2\) for some words \(w_1\) and \(w_2\) for which \(w_2\) does not contain the symbol \(E\) (so that \(u_i\, C\, A^{L_i}\, B = w_1\, E\, w_2\, C\, A^{L_i}\, B\)).
Then \(\underline{k}''\in \Sigma _8^+\) by choice of the replacement words, so that there is a unique \(y\in X\) with f-itinerary \(\underline{k}''\). By the choice of the replacement words we have \(\Vert \varGamma _f(y,r) - \varGamma _f(z,r)\Vert \le 1\) for all \(r\in {\mathbb {N}}\), so that \(\hat{\varGamma }_f(y) = \hat{\varGamma }_f(z) = \hat{\varGamma }_f(x)\). Since \(y\in W\), it only remains to show that \(y\in X_t\); that is, that \(f^r(y)\le \ell (t)\) whenever \(f^r(y)\in E\).
Suppose then that \(k''_r = E\). This symbol \(E\) must be contained in one of the replacement blocks \(w_1\,D\,w_2\,E\,C\,B\,D^{L_i-1}\) of the second kind. If it is contained in the word \(w_1\) then \(f^r(y)\le f^r(z)\le \ell (t)\), since the itineraries of \(f^r(y)\) and \(f^r(z)\) agree (and contain only orientation-preserving symbols) up to the point where \(f^{r+s}(y)\in D\) and \(f^{r+s}(z)\in E\). If it is not contained in the word \(w_1\) then, since \(w_2\) does not contain the symbol \(E\), we have \(f^{r+1}(y)\in C\). Therefore \(f^r(y)\le \ell (0)\le \ell (t)\), since \(f(\ell (0))\in D\).
Step 3: \({\text {rot}}_p(Y_t,f,\varGamma ) = \varPi ({\text {rot}}_p(Z_t, F, \beta ))\)
We use Lemma 2 applied to the return map \(F:Z_t\rightarrow Z_t\) induced by \(f:Y_t\rightarrow Y_t\). The return time \(N:Z_t\rightarrow {\mathbb {R}}\) is given by \(N=2\) on C and \(N=1\) on \(D\cup E\); and the observable \(\varPhi :Z_t\rightarrow {\mathbb {R}}^2\) corresponding to \(\varGamma :Y_t\rightarrow {\mathbb {R}}^2\) takes values (0, 1) on C, (0, 0) on \(D\), and (1, 0) on \(E\).
Now \(\varPhi = L\circ \beta \), where \(L:{\mathbb {R}}^3\rightarrow {\mathbb {R}}^2\) is given by \(L(x,y,z) = (z,x)\); and \(N = M\circ \beta \), where \(M:{\mathbb {R}}^3\rightarrow {\mathbb {R}}\) is given by \(M(x,y,z) = 2x+y+z\). Now if \({\mathbf {v}}\in \varDelta \) then \(\varPi ({\mathbf {v}}) = L({\mathbf {v}})/M({\mathbf {v}})\) (since \(2v_0+v_1+v_2 = 1+v_0\)). Since \(\varPi \) is injective, it follows from Lemma 2 that \({\text {rot}}_p(Y_t,f,\varGamma ) = \varPi ({\text {rot}}_p(Z_t, F, \beta ))\) as required.
Step 4: \(\varPi ({\text {rot}}_p(Z_t, F, \beta )) = \varPi ({\text {DF}}(K(a(t))))\)
This is immediate from Lemma 3(d) and the definition \({\text {DF}}(K(a(t))) = {\text {rot}}_p(B(K(a(t))), \sigma , \kappa )\), since the observables \(\beta \) on \(Z_t\) and \(\kappa \) on B(K(a(t))) correspond under the conjugacy \(h_t\). \(\square \)
We now apply Theorem 2 in conjunction with Theorem 1 to describe the rotation sets \(\rho _8(t)\). Write \({\mathscr {R}}= \{\rho _8(t):t\in [0,1]\}\subset {\mathscr {H}}({\mathbb {R}}^2)\), ordered by inclusion. We say that a vector \({\mathbf {v}}=(v_1,v_2)\in {\mathbb {R}}^2\) is planar totally irrational if \(v_1\), \(v_2\), and 1 are rationally independent. This condition is equivalent to minimality of the translation of the torus whose lift is \(z\mapsto z+{\mathbf {v}}\).
Theorem 3
-
(a)
Let \(t\in [0,1]\). Then \(\rho _8(t) = {\text {rot}}_p(X, \gamma ^t,f_t) = {\text {rot}}_{\mathrm{MZ}}(X,\gamma ^t,f_t) = {\text {rot}}_m(X, \gamma ^t,f_t)\) is compact and convex.
-
(b)
The map \(\rho _8:[0,1]\rightarrow {\mathscr {R}}\) is continuous and non-decreasing.
-
(c)
The bifurcation set \({\mathscr {B}}\subset [0,1]\) of parameters t at which \(\rho _8\) is not locally constant is a measure zero Cantor set. There is a partition \({\mathscr {B}}=B_1\sqcup B_2\sqcup B_3\) with the following properties :
-
(i)
The set \(B_1\) consists of the endpoints of the complementary gaps of \({\mathscr {B}}\). On each such gap, \(\rho _8(t)\) is a constant polygon with rational vertices.
-
(ii)
If \(t\in B_2\) then \({\text {Ex}}(\rho _8(t))\) consists of infinitely many rational polyhedral vertices together with a single irrational limit extreme point.
-
(iii)
If \(t\in B_3\) then \({\text {Ex}}(\rho _8(t))\) consists of infinitely many rational polyhedral vertices together with two irrational limit extreme points, which are endpoints of a line segment in \({\text {Bd}}(\rho _8(t))\).
-
(iv)
Each of \(B_2\) and \(B_3\) is uncountable, and if \(t\in B_2\cup B_3\) then \(\rho _8(t)\not =\rho _8(t')\) for all \(t'\not =t\).
-
(i)
-
(d)
\({\mathscr {R}}\) is order-preserving homeomorphic to a compact interval, and each \(\rho _8(B_i)\) is dense in \({\mathscr {R}}\).
-
(e)
There is a dense \(G_\delta \) subset of \({\mathscr {R}},\) contained in \(\rho _8(B_2),\) consisting of rotation sets whose limit extreme point is smooth and planar totally irrational.
-
(f)
The map \({\text {Ex}}\circ \,\rho _8:[0,1]\rightarrow {\mathscr {H}}({\mathbb {R}}^2)\) is discontinuous at each point of \(B_3\) and at the right-hand endpoints of the complementary gaps of \({\mathscr {B}},\) and is continuous elsewhere.
Proof
Let \(t\in [0,1]\). \({\text {DF}}(K(a(t)))\) is compact and convex for each t by Theorem 1(a). It follows from Theorem 2 and Lemma 3(c) that \(\rho _8(t):={\text {rot}}_p(X,\gamma ^t,f_t)\) is also compact and convex, since \(\varPi \) is a projective homeomorphism onto its image. Equality with \({\text {rot}}_{\mathrm{MZ}}(X,\gamma ^t,f_t)\) and \({\text {rot}}_m(X,\gamma ^t,f_t)\) follows from Lemma 1(b) and the continuity of \(\gamma ^t\). This establishes part (a).
If \(t\in {\mathscr {C}}\) then \(\rho _8(t) = \varPi ({\text {DF}}(K(t)))\) by Theorem 2 and the definition of a. Moreover, if \(J=(t_1,t_2)\) is a complementary component of \({\mathscr {C}}\), then \(\rho _8(t) = \rho _8(t_1)\) for all \(t\in J\). Since \(K:{\mathscr {C}}\rightarrow \{\underline{w}\in \mathrm {Max}:\underline{w}\ge 2\overline{1}\}\) is an order-preserving homeomorphism by Lemma 3(c), it follows that \(\rho _8(t_2) = \rho _8(t_1)\) also. In particular, because \(K(t_1)\not =K(t_2)\), Theorem 1(c)(iv) and (c)(i) give that \(\rho _8(t)\) is a constant polygon with rational vertices for \(t\in [t_1,t_2]\). In particular, \(K(t_1)\) and \(K(t_2)\) are consecutive maximal sequences contained in one of the intervals of Theorem 1(c)(i).
Thus \(\rho _8\) is constant on the closure of each complementary interval of \({\mathscr {C}}\); while \(\rho _8|_{{\mathscr {C}}} = \varPi \circ {\text {DF}}\circ K\) is continuous and non-decreasing by Lemma 3(c) and Theorem 1(b). This establishes part (b).
The bifurcation set \({\mathscr {B}}\) of \(\rho _8\) is therefore contained in \({\mathscr {C}}\), and in particular has measure zero by Lemma 3(b). \({\mathscr {B}}\) is the preimage of the bifurcation set of \({\text {DF}}\), and can therefore be partitioned as \({\mathscr {B}}=B_1\sqcup B_2\sqcup B_3\), where (using the notation of Theorem 1) \(B_2 = K^{-1}(M_2)\), \(B_3 = K^{-1}(M_3)\), and
It is a Cantor set by Theorem 1(c)(v) and Lemma 3(c). The remaining statements of the theorem are just translations of the corresponding statements of Theorem 1, using the fact that \(\varPi \) is a projective homeomorphism onto its image and the observation that an element \({{\alpha }}\) of \(\varDelta \) is totally irrational if and only \(\varPi ({{\alpha }})\) is planar totally irrational. \(\square \)
6 Rotation sets of a family of torus homeomorphisms
In this section we will construct a continuously varying family \(\{\varPhi _t\}\) of self-homeomorphisms of the torus whose rotation sets \(\rho (t)\) satisfy \(\rho (t)=\rho _8(t)\) for all \(t\in [0,1]\). To do this, we use Theorem 3.1 of [5] to “unwrap” the family \(f_t\). This theorem is a generalization of a result of Barge and Martin [4] to parameterized families. It states (using definitions given below) that if \(\{f_t\}\) is a continuously varying family of continuous self-maps of a boundary retract X of a manifold M, satisfying a certain topological condition (unwrapping), then there is a continuously varying family \(\{\varphi _t\}\) of self-homeomorphisms of M such that \(f_t\) and \(\varphi _t\) share their essential dynamical properties for each t.
In Sect. 6.1 we state a version of the theorem which is customized to the requirements of this paper. The theorem will then be applied in Sect. 6.2 to construct the family of torus homeomorphisms \(\{\varPhi _t\}\) and show that \(\rho (\varPhi _t)=\rho _8(t)\) for all t. All parameterized families of maps in this section will be assumed to have parameter t varying over [0, 1].
6.1 Unwrapping parameterized families
Definition 1
(Boundary retraction) Let M be a compact manifold with non-empty boundary \(\partial M\) and X be a compact subset of M. A continuous map \(\varPsi :\partial M\times [0,1]\rightarrow M\) is said to be a boundary retraction of M onto X if it satisfies the following properties:
-
1.
\(\varPsi \) restricted to \(\partial M \times [0,1)\) is a homeomorphism onto \(M - X\),
-
2.
\(\varPsi (\eta ,0) = \eta \) for all \(\eta \in \partial M\), and
-
3.
\(\varPsi (\partial M \times \{1\}) = X\).
Therefore \(\varPsi \) decomposes M into a continuously varying family of arcs \(\{\gamma _\eta \}_{\eta \in \partial M}\) defined by \(\gamma _\eta (s) = \varPsi (\eta ,s)\), whose images are mutually disjoint except perhaps at their final points, which cover X. In particular, every point of \(M-X\) can be written uniquely as \(\varPsi (\eta ,s)\) with \(\eta \in \partial M\) and \(s\in [0,1)\).
Definition 2
(Unwrapping of a family, Associated family of near-homeomorphisms) Let \(\varPsi :\partial M\times [0,1]\rightarrow M\) be a boundary retraction of M onto X, and \(R:M\rightarrow X\) be the retraction defined by \(R(\varPsi (\eta ,s)) = \varPsi (\eta ,1)\). An unwrapping of a continuously varying family \(\{f_t\}\) of continuous maps \(f_t:X\rightarrow X\) is a continuously varying family \(\{\overline{f}_t\}\) of self-homeomorphisms of M with the property that, for each t,
-
1.
\(R\circ \overline{f}_t|_X = f_t\), and
-
2.
\(\overline{f}_t\) is the identity on \(\partial M\).
Suppose that \(\{\overline{f}_t\}\) is an unwrapping of \(\{f_t\}\). Let \(\lambda :[0,1]\rightarrow [0,1]\) be given by \(\lambda (s)=2s\) for \(s\in [0,1/2]\) and \(\lambda (s) = 1\) for \(s\in [1/2,1]\), and define \(\Upsilon :M\rightarrow M\) by \(\Upsilon (\varPsi (\eta ,s)) = \varPsi (\eta , \lambda (s))\), which is well defined since \(\lambda (1)=1\). Write \(N(E) = \varPsi (\partial M\times [1/2,1])\), a compact neighborhood of X which is homeomorphic to M by the homeomorphism \(S:M\rightarrow N(E)\) defined by \(S(\varPsi (\eta ,s)) = \varPsi (\eta , (s+1)/2)\), and satisfies \(\Upsilon (N(E))=X\). Let \(\{\overline{F}_t\}\) be the family of self-homeomorphisms of M which is defined by \(\overline{F}_t = S\circ \overline{f}_t\circ S^{-1}\) in N(E), and \(\overline{F}_t = \mathrm {id}\) in \(M-N(E)\).
The family of near-homeomorphisms \(\{H_t\}\) associated to the unwrapping \(\{\overline{f}_t\}\) is defined by
Remark 3
-
(a)
\(H_t|_X = R\circ \overline{f}_t|_X = f_t\).
-
(b)
\(H_t|_{\partial M}\) is the identity.
-
(c)
If C is a compact subset of M disjoint from \(\partial M\) then there is some \(N\ge 0\) with \(H_t^N(C)\subset X\) for all t, since \(H_t(\varPsi (\eta ,s)) = \varPsi (\eta ,2s)\) if \(s\le 1/2\) and \(H_t(\varPsi (\eta ,s))\in X\) if \(s\ge 1/2\).
Theorem 4
[5] Let M be a compact manifold with boundary \(\partial M,\varPsi \) be a boundary retraction of M onto a subset X, and \(\{f_t\}\) be a continuously varying family of continuous surjections \(X\rightarrow X\). Suppose that an unwrapping \(\{\overline{f}_t\}\) of \(\{f_t\}\) exists, and let \(\{H_t\}\) be the associated family of near-homeomorphisms.
Then for every \(\varepsilon >0\) there is a continuously varying family \(\{\varphi _t\}\) of self-homeomorphisms of M, and a Hausdorff-continuously varying family \(\{\varLambda _t\}\) of compact \(\varphi _t\)-invariant subsets of M having the following properties for each \(t\in [0,1]\).
-
(a)
There is a continuous map \(g_t:M\rightarrow M\) within \(C^0\) distance \(\varepsilon \) of the identity, with \(g_t(\varLambda _t) = X,\) such that \(H_t\circ g_t = g_t\circ \varphi _t\). In particular, \(f_t\circ g_t|_{\varLambda _t} = g_t\circ \varphi _t|_{\varLambda _t}\).
-
(b)
\(\varphi _t|_{\varLambda _t}\) is topologically conjugate to the natural extension \({\hat{f}}_t\) acting on the inverse limit space \(\varprojlim (X, f_t)\).
-
(c)
\(\varphi _t\) is the identity on \(\partial M\).
-
(d)
The non-wandering set \(\varOmega (\varphi _t)\) of \(\varphi _t\) is contained in \(\varLambda _t\cup \partial M\).
Thus \(\varphi _t|\varLambda _t\) is semi-conjugate to \(f_t\), and \(\varLambda _t\) contains all of the non-trivial recurrent dynamics of \(\varphi _t\).
That \(H_t\circ g_t = g_t\circ \varphi _t\) is not contained in Theorem 3.1 of [5], but is explicitly stated in its proof. Statement (d) of Theorem 4 is slightly stronger than the corresponding statement in [5], and we now sketch its proof.
For each t, let \(M^t_\infty = \varprojlim (M, H_t)\subset M^{\mathbb {N}}\) be the inverse limit of \(H_t:M\rightarrow M\), and \({\widehat{H}}_t:M^t_\infty \rightarrow M^t_\infty \) be the natural extension of \(H_t\). Corollary 2.3 of [5] provides a family of homeomorphisms \(h_t:M^t_\infty \rightarrow M\). In the proof of Theorem 3.1 of [5], the homeomorphisms \(\varphi _t\) are defined by \(\varphi _t = h_t\circ {\widehat{H}}_t\circ h_t^{-1}\), and the subsets \(\varLambda _t\) are given by \(\varLambda _t = h_t(K_t)\), where
It therefore suffices to show that, for all t, \(\varOmega ({\widehat{H}}_t)\) is contained in the union of \(K_t\) and
Now if \(\underline{x}\in M^t_\infty - (K_t\cup \partial M^t_\infty )\) then there is some k with \(x_k\in M - (X \cup \partial M)\). Let C be a compact neighborhood of \(x_k\) in M which is disjoint from \(X\cup \partial M\), and define
a neighborhood of \(\underline{x}\) in \(M^t_\infty \). Let N be large enough that \(H_t^N(C) \subset X\) (see Remark 3(c)): then \({\widehat{H}}_t^r(\underline{y})_k \in X\) for all \(\underline{y}\in U\) and \(r\ge N\), so that \({\widehat{H}}_t^r(U)\cap U = \emptyset \) for all \(r\ge N\) as required.
6.2 The family of torus homeomorphisms
Let \(\pi :{\mathbb {R}}^2\rightarrow {\mathbb {T}}^2\) be the universal cover of the torus \({\mathbb {T}}^2 = {\mathbb {R}}^2/{\mathbb {Z}}^2\), and let \(M\subset {\mathbb {T}}^2\) be the torus with a hole obtained by excising an open square S of side length 1 / 2 centred in the fundamental domain of the torus: that is,
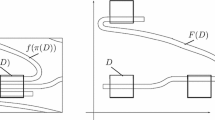
We regard \(X = S_1\vee S_2\) as the subset of M given by \(S_1 = \pi ([0,1]\times \{0\})\) and \(S_2 = \pi (\{0\}\times [0,1])\). For each \(\eta \in \partial M\), let \(\gamma _\eta :[0,1]\rightarrow M\) be the arc in M whose image is a segment of the straight line passing through the centre of the fundamental domain and \(\eta \), parameterized proportionally to arc length, so that \(\gamma _\eta (0)=\eta \) and \(\gamma _\eta (1)\in X\) (see the dotted lines on Fig. 5). These arcs define a boundary retraction \(\varPsi :\partial M\times [0,1] \rightarrow M\) of M onto X, each point of X being the endpoint of two of the arcs, with the exception of the vertex v which is an endpoint of four arcs. The associated retraction \(R:M\rightarrow X\) is defined by \(R(\varPsi (\eta ,s)) = \varPsi (\eta ,1)\).
Let \(\overline{f}_1:M\rightarrow M\) be a homeomorphism unwrapping \(f_1:X\rightarrow X\) as depicted in Fig. 5: the images of \(S_1\) and \(S_2\) under \(\overline{f}_1\) are shown with solid and dashed lines respectively, so that \(R\circ \overline{f}_1|_X = f_1\), and \(\overline{f}_1\) is then extended arbitrarily to a homeomorphism \(M\rightarrow M\) which is the identity on \(\partial M\). (Note that \(\overline{f}_1\) is injective on X, since \(f_1(p)=p\), where p is the common endpoint of the edges \(E\) and \(e\) of \(S_1\) as depicted in Fig. 4.) Postcomposing \(\overline{f}_1\) with a suitable isotopy supported in the disk D of Fig. 5 yields an unwrapping \(\{\overline{f}_t\}\) of the family \(\{f_t\}\).

Unwrapping the family \(\{f_t\}\) in \({\mathbb {T}}^2 - S\)
Let \(\{H_t\}\) be the family of near-homeomorphisms associated with the unwrapping \(\{\overline{f}_t\}\). Each \(H_t\) is homotopic to the identity, since \(H_t\vert _X = f_t\). Let \(\varepsilon <1/10\) be small enough that \(d(H_t(x), H_t(y))<1/10\) for all t and all \(x,y\in M\) with \(d(x,y)<\varepsilon \).
Applying Theorem 4 with this value of \(\varepsilon \) yields
-
A continuously varying family \(\{\varphi _t\}\) of homeomorphisms \(M\rightarrow M\), each the identity on \(\partial M\);
-
A continuously varying family \(\{\varLambda _t\}\) of compact \(\varphi _t\)-invariant subsets of M with the property that the non-wandering set \(\varOmega (\varphi _t)\) of \(\varphi _t\) is contained in \(\varLambda _t\cup \partial M\) for each t; and
-
A continuous map \(g_t:M\rightarrow M\) for each t, within \(C^0\)-distance \(\varepsilon \) of the identity, satisfying \(g_t(\varLambda _t) = X\) and \(H_t\circ g_t = g_t\circ \varphi _t\). In particular, \(f_t\circ g_t|_{\varLambda _t} = g_t\circ \varphi _t|_{\varLambda _t}\).
By choice of \(\varepsilon \) and the relationship \(H_t\circ g_t = g_t\circ \varphi _t\), the homeomorphism \(\varphi _t\) is within \(C^0\) distance 1 / 5 of the near-homeomorphism \(H_t\), and is therefore isotopic to the identity.
Definition 3
(The family \(\{\varPhi _t\}\), the displacement functions \(\delta ^t\), and the rotation sets \(\rho (t)\)) For each \(t\in [0,1]\), let
-
\(\varPhi _t:{\mathbb {T}}^2\rightarrow {\mathbb {T}}^2\) be the homeomorphism obtained by extending \(\varphi _t:M\rightarrow M\) as the identity across the excised square S;
-
\({\tilde{\varPhi }}_t:{\mathbb {R}}^2\rightarrow {\mathbb {R}}^2\) be the lift of \(\varPhi _t\) which fixes the points of \(\pi ^{-1}(\overline{S})\);
-
\(\delta ^t:{\mathbb {T}}^2\rightarrow {\mathbb {R}}^2\) be the function defined by \(\delta ^t(x) = {\tilde{\varPhi }}_t(\tilde{x}) - \tilde{x}\), where \(\tilde{x}\) is an arbitrary lift of x; and
-
\(\rho (t) = {\text {rot}}_p({\mathbb {T}}^2, \varPhi _t, \delta ^t)\) be the pointwise rotation set of \(\varPhi _t\) with respect to the lift \({\tilde{\varPhi }}_t\).
Theorem 5
\(\rho (t) =\rho _8(t)\) for each \(t\in [0,1]\).
In particular, \(\rho (t) = {\text {rot}}_p({\mathbb {T}}^2, \varPhi _t, \delta ^t) = {\text {rot}}_{\mathrm{MZ}}({\mathbb {T}}^2, \varPhi _t, \delta ^t) = {\text {rot}}_m({\mathbb {T}}^2, \varPhi _t, \delta ^t),\) and all of the statements of Theorem 3 hold when \(\rho _8(t)\) is replaced with \(\rho (t)\).
Proof
Since \(\varphi _t\) is the identity on \(\partial M\), it follows that \(g_t(\partial M) \subset \partial M\). For if \(x\in \partial M\) then \(H_t(g_t(x)) = g_t(\varphi _t(x)) = g_t(x)\), so that \(g_t(x)\) is a fixed point of \(H_t\). However \(H_t\) has no fixed points outside of \(\partial M \cup X\) by construction; and \(g_t(x)\not \in X\) since \(d(x, g_t(x))<\epsilon < 1/10\).
We can therefore extend \(g_t\) to a continuous map \(g_t:{\mathbb {T}}^2\rightarrow {\mathbb {T}}^2\) by coning off its action on \(\partial M\). We also extend \(H_t\) as the identity across the excised square S, to a continuous map \(H_t:{\mathbb {T}}^2\rightarrow {\mathbb {T}}^2\). Henceforth we use the symbols \(g_t\) and \(H_t\) to refer to these continuous self-maps of the torus, rather than to the original self-maps of M. Since \(g_t(\overline{S}) \subset \overline{S}\) and \(\varPhi _t|_S = H_t|_S = \mathrm {id}|_S\), we have
Note also that, since \(\varOmega (\varphi _t)\subset \varLambda _t\cup \partial M\), we have \(\varOmega (\varPhi _t) \subset \varLambda _t\cup \overline{S}\).
For each t, let \(\tilde{H}_t:{\mathbb {R}}^2\rightarrow {\mathbb {R}}^2\) be the lift of \(H_t\) which fixes the points of \(\pi ^{-1}(\overline{S})\). Then \(\tilde{H}_t\) also fixes the set \(\pi ^{-1}(v)\) of integer lattice points, since the vertex v of X is in the same \(H_t\)-Nielsen class as the points of \(\overline{S}\) by construction of \(H_t\). Let \(\eta ^t:{\mathbb {T}}^2\rightarrow {\mathbb {R}}^2\) be the displacement for \(H_t\): that is,
where \(\tilde{x}\) is an arbitrary lift of x. Finally, let \(\tilde{g}_t:{\mathbb {R}}^2\rightarrow {\mathbb {R}}^2\) be the lift of \(g_t\) which is \(\varepsilon \)-close to \(\mathrm {id}_{{\mathbb {R}}^2}\), so that
We will prove in successive steps that
which will establish the equality of \(\rho _8(t) = {\text {rot}}_p(X,f_t,\gamma ^t)\) and \(\rho (t) = {\text {rot}}_p({\mathbb {T}}^2, \varPhi _t, \delta ^t)\). The equality of the pointwise, Misiurewicz–Ziemian, and measure rotation sets then follows from Lemma 1(b) and the convexity of \(\rho _8(t)\), completing the proof of the theorem.
Step 1: \({\text {rot}}_p(X, f_t, \gamma ^t) = {\text {rot}}_p(\varLambda _t, \varPhi _t, \eta ^t\circ g_t)\)
Since \(g_t(\varLambda _t) = X\) and \(f_t\circ g_t|_{\varLambda _t} = g_t\circ \varPhi _t|_{\varLambda _t}\), it follows from (6) that
However \(\eta ^t|_X = \gamma ^t\), since \(H_t|_X = f_t\) and the lifts \(\tilde{H}_t\) and \(\tilde{f}_t\) both fix points above the vertex v of X, so that \(\gamma ^t\circ g_t|_{\varLambda _t} = \eta ^t\circ g_t|_{\varLambda _t}\).
Step 2: \({\text {rot}}_p(\varLambda _t, \varPhi _t, \eta ^t\circ g_t) = {\text {rot}}_p(\varLambda _t, \varPhi _t, \delta ^t)\)
For all \(x\in {\mathbb {T}}^2\), \(\tilde{x}\in \pi ^{-1}(x)\), and \(r\in {\mathbb {N}}\) we have
Since \(\delta ^t_{\varPhi _t}(x,r) = {\tilde{\varPhi }}_t^r(\tilde{x}) - \tilde{x}\) and \(\tilde{g}_t\) is \(\varepsilon \)-close to the identity, \(\eta ^t\circ g_t\) and \(\delta ^t\) are cohomologous with respect to \(\varPhi _t\), and the equality follows.
Step 3: \({\text {rot}}_p(\varLambda _t, \varPhi _t, \delta ^t) = {\text {rot}}_p({\mathbb {T}}^2, \varPhi _t, \delta ^t)\)
We have \({\text {rot}}_p(\varLambda _t, \varPhi _t, \delta ^t) = {\text {rot}}_p(\varLambda _t\cup \overline{S}, \varPhi _t, \delta ^t)\), since \(\widehat{\delta ^t}_{\varPhi _t}(x) = (0,0)\) for all \(x\in \overline{S}\), and the rotation vector (0, 0) is realized by any point \(y\in \varLambda _t\) satisfying \(g_t(y)=v\). Since \({\text {rot}}_p(\varLambda _t, \varPhi _t, \delta ^t) = \rho _8(t)\) is convex, and the recurrent set \(R(\varPhi _t)\) satisfies \(R(\varPhi _t)\subset \varOmega (\varPhi _t)\subset \varLambda _t\cup \overline{S}\), the equality follows from Lemma 1(c). \(\square \)
Remark 4
The results about digit frequency sets of symbolic \(\beta \)-shifts on three symbols summarized in Theorem 1 have analogs for symbolic \(\beta \)-shifts defined over arbitrarily many symbols [7]. These can be used to compute the rotation sets of families of self-maps of the wedge \(X=S_1\vee S_2\vee \cdots \vee S_n\) of arbitrarily many circles defined analogously to the family \(\{f_t\}\). These families can then be unwrapped to yield families of homeomorphisms of n-dimensional tori whose rotation sets agree with those of the self-maps of X. The pointwise (or Misiurewicz–Ziemian, or measure) rotation sets of these higher-dimensional families then have properties analogous to those of the family \(\{\varPhi _t\}\) given in Theorem 3. The only differences are: the rotation sets are n-dimensional, and statements about polygons should be replaced with statements about polytopes; in the case \(t\in B_3\), there can be between 2 and n irrational extreme points; the authors have not proved a statement analogous to the genericity of smooth limit extreme points; and neither have we proved the discontinuity of the set of extreme points at parameters in \(B_3\).
Here we sketch the changes which are required in the case \(n\ge 3\). We subdivide the circle \(S_1\) into \(2n+1\) oriented edges and the other \(S_i\) into 3 oriented edges:
The map \(f:X\rightarrow X\) is defined by
for \(2\le i\le n\). The family of maps \(f_t:X\rightarrow X\) is then defined by cutting off the tip of the transition \(E\,e\mapsto S_1\,S_1^{-1}\). Pointwise rotation sets \({\text {rot}}_p(X, f_t, \gamma ^t)\) are defined by lifting to the abelian cover \(\tilde{X}\).
The analogs of Lemma 3 and Theorem 2 are proved in exactly the same way. In particular, when calculating rotation sets, it suffices to restrict to those points whose orbits lie entirely in the edges \(B_i\) (\(2\le i\le n\)), \(C_i\) (\(2\le i\le n\)), D and E. Associating the symbol i to the word \(C_{i+2}\,B_{i+2}\) for \(0\le i\le n-2\), the symbol \(n-1\) to D, and the symbol n to E, reduces the calculation of these rotation sets to that of digit frequency sets of symbolic \(\beta \)-shifts on \(n+1\) symbols.
Constructing a family \(\{\varPhi _t\}_{t\in [0,1]}\) of self-homeomorphisms of \({\mathbb {T}}^n\) with the same rotation sets proceeds exactly as in Sect. 6.2, using for the manifold M a tubular neighborhood of X.
We thank the referee for pointing out that other useful generalizations can be obtained using an embedded wedge of arbitrarily many non-homotopic circles in \({\mathbb {T}}^2\). On such a wedge, one could define a family of maps which unwraps; or one could use Denjoy examples as in [21].
7 Dynamical representatives of rotation vectors in symbolic \(\beta \)-shifts
In this section and the next we will study dynamical representatives of elements of the rotation sets \({\text {DF}}(\underline{w})\), \(\rho _8(t)\), and \(\rho (t)\): that is, how elements of these sets are represented by invariant sets and invariant measures of the underlying dynamical systems. The simplest case, of digit frequency sets of symbolic \(\beta \)-shifts, will be treated in this section, and the results applied in Sect. 8 to the families \(\{f_t\}\) and \(\{\varPhi _t\}\) of maps of the figure eight space and the torus.
7.1 Types of dynamical representatives of rotation vectors
We start with some definitions and preliminary observations in the general situation of Sect. 3.2.
Let Z be a compact metric space, \(g:Z\rightarrow Z\) be continuous, and \(\phi :Z\rightarrow {\mathbb {R}}^k\) be a continuous observable. Given an element \({\mathbf {v}}\) of the rotation set \({\text {rot}}_p(Z,g,\phi )\), we first consider invariant subsets in which every element z has rotation vector \({\hat{\phi }}_g(z) = {\mathbf {v}}\). We define three types of such subsets, with increasingly strong properties: \({\mathbf {v}}\)-sets; \({\mathbf {v}}\)-minimal sets; and \({\mathbf {v}}\)-rotational sets.
Definition 4
(\({\mathbf {v}}\)-set; \({\mathbf {v}}\)-minimal set; bounded deviation; \({\mathbf {v}}\)-rotational set)
-
(a)
A \({\mathbf {v}}\)-set for g with respect to \(\phi \) is a non-empty g-invariant subset Y of Z with \({\hat{\phi }}_g(y)={\mathbf {v}}\) for all \(y\in Y\). We say also that Y represents the rotation vector \({\mathbf {v}}\).
-
(b)
A \({\mathbf {v}}\)-minimal set for g with respect to \(\phi \) is a compact g-minimal \({\mathbf {v}}\)-set.
-
(c)
A point \(z\in Z\) with \({\hat{\phi }}_g(z) = {\mathbf {v}}\) is said to have bounded deviation (or bounded mean motion) if there is a constant M such that
$$\begin{aligned} \Vert \phi _g(z,r) - r{\mathbf {v}}\Vert < M \quad \text {for all } r\ge 0. \end{aligned}$$(10)A \({\mathbf {v}}\)-set Y for g with respect to \(\phi \) has bounded deviation if there is an M such that (10) holds for all \(z\in Y\).
-
(d)
A \({\mathbf {v}}\)-rotational set for g with respect to \(\phi \) is a \({\mathbf {v}}\)-minimal set with bounded deviation.
Remark 5
-
(a)
Any compact \({\mathbf {v}}\)-set contains a minimal subset Y, which is therefore a \({\mathbf {v}}\)-minimal set.
-
(b)
A straightforward consequence of the continuity of g and \(\phi \) is that if \(z\in Z\) is any point for which (10) holds, its omega-limit set \(\omega (z,g)\) is a \({\mathbf {v}}\)-set with bounded deviation (cf. [26]). Hence, by (a), the existence of such a point z implies the existence of a \({\mathbf {v}}\)-rotational set.
-
(c)
The papers of Jäger [14, 15] explore the implications of bounded and unbounded deviation, showing in particular that if \({\mathbf {v}}\) is irrational then the dynamics on any \({\mathbf {v}}\)-rotational set is semi-conjugate to rigid translation on a torus of some dimension. See Remark 9(b).
We next consider the representation of rotation vectors by ergodic invariant measures.
Definition 5
(Representation by ergodic invariant measures; directional and lost) Let \(\mu \in {\mathscr {M}}_e(g)\).
-
(a)
The measure \(\mu \) represents \({\mathbf {v}}\) if \({\mathbf {v}}= {\text {rot}}(\mu ,g,\phi )\). (That is, if \({\mathbf {v}}= \int \phi \,d\mu \).)
-
(b)
The measure \(\mu \) is (\({\mathbf {v}}\)-)directional (for g with respect to \(\phi \)) if its support \({\text {supp}}(\mu )\) is a \({\mathbf {v}}\)-set, where \({\mathbf {v}}={\text {rot}}(\mu ,g,\phi )\); it is lost otherwise ([13], cf. [16, 17]).
Remark 6
-
(a)
Using this terminology, Oxtoby’s theorem [27] states that \({\text {supp}}(\mu )\) is uniquely ergodic if and only if \(\mu \) is directional for g with respect to every continuous observable \(\phi \). For a measure to be directional can therefore be interpreted as an analog of unique ergodicity with respect to a single preferred observable.
-
(b)
Every \({\mathbf {v}}\)-minimal set Y is the support of a directional measure (namely any \(\mu \in {\mathscr {M}}_e(g|_Y)\)); and, conversely, the support of any directional measure contains a \({\mathbf {v}}\)-minimal set by Remark 5(a).
7.2 Infimax minimal sets
In the remainder of Sect. 7 we restrict to the situation of Sect. 4, where \(Z=\Sigma ^+=\{0,1,2\}^{\mathbb {N}}\) ordered lexicographically, the dynamics is given by the shift map \(\sigma \), and the observable of interest is \(\kappa :\Sigma ^+ \rightarrow \varDelta \subset {\mathbb {R}}^3\) defined by \(\kappa (\underline{w}) = {\mathbf e}_{w_0}\). We adopt the abbreviated notation \({\hat{\kappa }}(\underline{w}):={\hat{\kappa }}_\sigma (\underline{w})\), \({\text {DF}}_p(X) := {\text {rot}}_p(X, \sigma , \kappa )\), and \({\text {DF}}_{\mathrm{MZ}}(X) := {\text {rot}}_{\mathrm{MZ}}(X, \sigma , \kappa )\), where X is a compact shift-invariant subset of \(\Sigma ^+\). Recall that if \(\underline{w}\in \mathrm {Max}\), we write \({\text {DF}}(\underline{w})\) for \({\text {DF}}_p(B(\underline{w}))\), where \(B(\underline{w})\) is given by (8).
The main tool used to analyse the digit frequency sets of symbolic \(\beta \)-shifts is the infimax sequences introduced in [6]. We now summarize necessary results from that paper and from [7]. Define
Given \({{\alpha }}\in \varDelta '\), write \({\mathscr {I}}({{\alpha }})\in \Sigma ^+\) for the infimum of the set of maximal sequences \(\underline{w}\in \mathrm {Max}\) with \({\hat{\kappa }}(\underline{w})={{\alpha }}\). Note that \({\mathscr {I}}({{\alpha }})\) is necessarily maximal, since \(\mathrm {Max}\) is closed in \(\Sigma ^+\), but need not satisfy \({\hat{\kappa }}({\mathscr {I}}({{\alpha }}))={{\alpha }}\). The infimax sequences \({\mathscr {I}}({{\alpha }})\), which can be calculated using a multidimensional continued fraction algorithm, have the additional property (Lemma 19 of [6]) that
A consequence of this (Lemma 16 of [7]) is that
Write
the closure in \(\Sigma ^+\) of the set of infimax sequences. It is shown in Lemmas 12 and 13 of [7] that \({\mathscr {J}}\) is a Cantor set, and that the only elements of \({\mathscr {J}}\) which are not limits of both strictly increasing and strictly decreasing sequences in \({\mathscr {J}}\) are
-
the elements added in the closure, which are not limits of any strictly increasing sequence in \({\mathscr {J}}\), and
-
the elements \({\mathscr {I}}({{\alpha }})\) with \({{\alpha }}\in {\mathbb {Q}}^3\), which are not limits of any strictly decreasing sequence in \({\mathscr {J}}\).
In particular, the supremum of any non-empty set of infimax sequences is itself an infimax sequence.
It follows from (12) (see Lemma 19 of [7]) that for all \(\underline{w}\in \mathrm {Max}\),
It is then immediate from Theorems 2 and 5 that, for all \(t\in [0,1]\), the rotation sets \(\rho _8(t)=\rho (t)\) are of the form \(\varPi ({\text {DF}}({\mathscr {I}}({{\alpha }})))\) for some \({{\alpha }}={{\alpha }}(t)\in \varDelta '\).
The three types of rotation sets which are described in Theorems 1 and 3 correspond to a fundamental trichotomy for elements of \(\varDelta '\):
-
Rational regular: When \({{\alpha }}\in {\mathbb {Q}}^3\), the infimax sequence \({\mathscr {I}}({{\alpha }})\) is periodic, and the digit frequency set \({\text {DF}}({\mathscr {I}}({{\alpha }}))\) is a polygon with rational vertices, one of which is \({{\alpha }}\).
-
Irrational regular: Regular \({{\alpha }}\not \in {\mathbb {Q}}^3\) are characterized by the property that \({\mathscr {I}}({{\alpha }})\not ={\mathscr {I}}({{\alpha }}')\) for all \({{\alpha }}'\not ={{\alpha }}\). In this case \({\mathscr {I}}({{\alpha }})\) is aperiodic, \({\hat{\kappa }}({\mathscr {I}}({{\alpha }})) = {{\alpha }}\), and \({\text {DF}}({\mathscr {I}}({{\alpha }}))\) has infinitely many rational polyhedral vertices limiting on the single irrational extreme point \({{\alpha }}\).
-
Irrational exceptional: Exceptional \({{\alpha }}\not \in {\mathbb {Q}}^3\) are characterized by the existence of a non-trivial exceptional interval \(P_{{\alpha }}\subset \varDelta '\) with the property that \({\mathscr {I}}({{\alpha }})={\mathscr {I}}({{\alpha }}')\) if and only if \({{\alpha }}'\in P_{{\alpha }}\). In this case \({\mathscr {I}}({{\alpha }})\) is aperiodic, \({\hat{\kappa }}({\mathscr {I}}({{\alpha }}))\) does not exist, and \({\text {DF}}({\mathscr {I}}({{\alpha }}))\) has infinitely many rational polyhedral vertices limiting on the two irrational endpoints of \(P_{{\alpha }}\).
The partition \(\mathrm {Max}=M_1\sqcup M_2\sqcup M_3\) of Theorem 1 is connected to this trichotomy as follows: \(\underline{w}\in M_2\) (respectively \(\underline{w}\in M_3\)) if and only if \(\underline{w}= {\mathscr {I}}({{\alpha }})\) for some irrational regular (respectively exceptional) \({{\alpha }}\); and \(\underline{w}\in M_1\) otherwise. The left hand endpoints of the intervals \(I_{\underline{w}}\) in \(M_1\) are exactly the sequences \({\mathscr {I}}({{\alpha }})\) for \({{\alpha }}\in {\mathbb {Q}}^3\); and the right hand endpoints are exactly the non-infimax elements of \({\mathscr {J}}\).
The following result, which is proved in Remark 23(b) of [6], will play a central rôle.
Lemma 4
For every \({{\alpha }}\in \varDelta ',\) the infimax sequence \({\mathscr {I}}({{\alpha }})\) is almost periodic, and hence its orbit closure is a minimal set.
This motivates the following definition.
Definition 6
(Infimax minimal sets) For each \({{\alpha }}\in \varDelta '\), we define the \({{\alpha }}\)-infimax minimal set
By the definition of \(B(\underline{w})\), the maximality of \({\mathscr {I}}({{\alpha }})\), and (12), we have
Therefore the infimax minimal set \(C_{{\alpha }}\) detects whether or not the vector \({{\alpha }}\) belongs to a given digit frequency set, and a natural question is how well these sets represent \({{\alpha }}\). It is already clear that \(C_{{\alpha }}\) is not an \({{\alpha }}\)-rotational set when \({{\alpha }}\) is exceptional (since it is not even an \({{\alpha }}\)-set), and Example 1 below shows that this can be the case also when \({{\alpha }}\) is irrational regular.
The sets \(C_{{\alpha }}\) were studied in the context of attractors of interval translation maps by Bruin and Troubetzkoy [9], and their results about unique ergodicity are included in the following lemma.
Lemma 5
-
(a)
If \({{\alpha }}\) is regular, then \(C_{{\alpha }}\) is uniquely ergodic. In particular, \(C_{{\alpha }}\) is an \({{\alpha }}\)-minimal set, and the unique ergodic measure is \({{\alpha }}\)-directional.
-
(b)
If \({{\alpha }}\) is exceptional, then \(C_{{\alpha }}\) has exactly two ergodic invariant measures \(\mu _1\) and \(\mu _2,\) and \({\text {rot}}(\mu _1, \sigma , \kappa )\) and \({\text {rot}}(\mu _2, \sigma , \kappa )\) are the endpoints of the exceptional interval \(P_{{\alpha }}\). In particular, \(C_{{\alpha }}\) is not an \({{\alpha }}\)-set, and \(\mu _1\) and \(\mu _2\) are both lost.
-
(c)
If \({{\alpha }}\) is exceptional, then \({\text {DF}}_{\mathrm{MZ}}(C_{{\alpha }}) = P_{{\alpha }}\).
Proof
Parts (a) and (b) are proved by Bruin and Troubetzkoy (Corollary 14 and Lemma 17 of [9]).
For part (c), we have \({\text {Conv}}({\text {DF}}_{\mathrm{MZ}}(C_{{\alpha }})) = P_{{\alpha }}\) by part (b) and Lemma 1(a), so that \(DF_{\mathrm{MZ}}(C_{{\alpha }})\subset P_{{\alpha }}\). For the reverse inclusion, Theorem 57 of [7] states that there are subsequences of \((\kappa _\sigma ({\mathscr {I}}({{\alpha }}), r)/r)_{r\ge 1}\) converging to every point of \(P_{{\alpha }}\), so that \(P_{{\alpha }}\subset {\text {DF}}_{\mathrm{MZ}}(C_{{\alpha }})\). \(\square \)
Example 1
This example (cf. Lemma 52 of [7]) shows that there exist totally irrational regular values of \({{\alpha }}\) for which \(C_{{\alpha }}\) does not have bounded deviation, and hence is not an \({{\alpha }}\)-rotational set.
Fix an integer \(n\ge 1\), and let \(\varLambda _n:\Sigma ^+\rightarrow \Sigma ^+\) be the substitution defined by \(0\mapsto 1\), \(1\mapsto 20^{n+1}\), and \(2\mapsto 20^n\), with abelianization
which is a Perron–Frobenius matrix since \(A_n^3\) is strictly positive. Let \({{\alpha }}\) be the positive Perron–Frobenius eigenvector of \(A_n\) which satisfies \(\Vert {{\alpha }}\Vert _1 = 1\). Then we have
-
(a)
\({\mathscr {I}}({{\alpha }})\) is the fixed point \(\lim _{r\rightarrow \infty }\varLambda _n^r(2)\) of the substitution \(\varLambda _n\) (Theorem 22 of [6]);
-
(b)
\({{\alpha }}\) is irrational regular (Theorem 27 of [6]);
-
(c)
\({{\alpha }}\) is totally irrational (Lemma 52 of [7]); and
-
(d)
\(A_n\) has real eigenvalues \(\lambda _1,\lambda _2,\lambda _3\) with \(|\lambda _3|<1<|\lambda _2|<\lambda _1\) (proof of Lemma 52 of [7]).
Write \(r_i = \Vert A_n^i{\mathbf e}_2\Vert _1\), so that \(\kappa _\sigma ({\mathscr {I}}({{\alpha }}), r_i) = A_n^i {\mathbf e}_2\). Let \({\mathbf {v}}_2\) be an eigenvector of \(A_n\) corresponding to the eigenvalue \(\lambda _2\). Then the magnitude of the component of \(\kappa _\sigma ({\mathscr {I}}({{\alpha }}), r_i)\) in the direction of \({\mathbf {v}}_2\) grows like \(|\lambda _2|^i\), and in particular
so that \({\mathscr {I}}({{\alpha }})\) does not have bounded deviation as required. In fact, we can be more explicit. By the Perron–Frobenius theorem, \(r_i\) grows like \(\lambda _1^i\). Writing \(\nu = \log (|\lambda _2|)/\log (\lambda _1)>0\) so that \(|\lambda _2| = \lambda _1^\nu \), we have
for some positive constants \(C_1\) and \(C_2\).
That \(C_{{\alpha }}\) does not have bounded deviation also follows from the much more general Theorem 1 of [1].
7.3 Representation of elements of \({\text {DF}}({\mathscr {I}}({{\alpha }}))\)
Recall that every digit frequency set \({\text {DF}}(\underline{w})\) is equal to \({\text {DF}}({\mathscr {I}}({{\alpha }}))\) for some \({{\alpha }}\in \varDelta '\); and hence every rotation set \(\rho _8(t)=\rho (t)\) is equal to \(\varPi ({\text {DF}}({\mathscr {I}}({{\alpha }})))\) for some \({{\alpha }}\in \varDelta '\).
In this section we consider representations of elements of \({\text {DF}}({\mathscr {I}}({{\alpha }}))\) in \(B({\mathscr {I}}({{\alpha }}))\). We prove two results: Theorem 6, concerning representations of \({{\alpha }}\) and points on the exceptional interval \(P_{{\alpha }}\); and Theorem 7, concerning representations of other elements of \({\text {DF}}({\mathscr {I}}({{\alpha }}))\).
We will need a preliminary lemma about infimaxes.
Lemma 6
Let \({{\alpha }}\in \varDelta ',\) and let X be a compact shift-invariant subset of \(\Sigma ^+\) with \({{\alpha }}\in {\text {DF}}_{\mathrm{MZ}}(X)\). Then \(\max X\ge {\mathscr {I}}({{\alpha }})\).
Proof
Suppose for a contradiction that \(\max X < {\mathscr {I}}({{\alpha }})\). Then \(X \subset B({\mathscr {I}}({{\alpha }}))\) by definition of the symbolic \(\beta \)-shift, and hence
by definition of the convex set \({\text {DF}}({\mathscr {I}}({{\alpha }})) := {\text {rot}}_p(B({\mathscr {I}}({{\alpha }})), \sigma , \kappa ) = {\text {rot}}_{\mathrm{MZ}}(B({\mathscr {I}}({{\alpha }})), \sigma , \kappa )\).
By Carathéodory’s theorem, we can find three extreme points \({{\beta }}_i\) (\(1\le i\le 3\)) of \({\text {Conv}}({\text {DF}}_{\mathrm{MZ}}(X))\) which contain \({{\alpha }}\) in their convex hull. By Lemma 1(a), there are elements \(\underline{w}_i\) of X with \({\hat{\kappa }}(\underline{w}_i) = {{\beta }}_i\) for each i.
Since \({{\beta }}_i\in {\text {Conv}}({\text {DF}}_{\mathrm{MZ}}(X))\subset {\text {DF}}({\mathscr {I}}({{\alpha }}))\), and \({{\alpha }}\) is either an extreme point of \({\text {DF}}({\mathscr {I}}({{\alpha }}))\) (in the regular case), or lies in the exceptional interval \(P_{{\alpha }}\) on the boundary of \({\text {DF}}({\mathscr {I}}({{\alpha }}))\), at least one of the points \({{\beta }}_i\) is either equal to \({{\alpha }}\), or lies in \(P_{{\alpha }}\). In either case, we have \({\mathscr {I}}({{\beta }}_i) = {\mathscr {I}}({{\alpha }})\). Therefore, since \(\underline{w}_i\in X\) has \({\hat{\kappa }}(\underline{w}_i)={{\beta }}_i\), (11) gives
which is the required contradiction. \(\square \)
Remark 7
Since \(C_{{\alpha }}\) is a minimal subset of \(\Sigma ^+\) with \({{\alpha }}\in {\text {DF}}_{\mathrm{MZ}}(C_{{{\alpha }}})\), Lemma 6 gives the characterisation
Theorem 6
Let \({{\alpha }}\in \varDelta '\). Then any minimal subset C of \(B({\mathscr {I}}({{\alpha }}))\) which satisfies
is equal to \(C_{{{\alpha }}}\). In particular,
-
(a)
if \({{\alpha }}\) is regular, then \(C_{{\alpha }}\) is the unique \({{\alpha }}\)-minimal set in \(B({\mathscr {I}}({{\alpha }}));\) and
-
(b)
If \({{\alpha }}\) is exceptional, then there are no \({{\alpha }}'\)-minimal sets in \(B({\mathscr {I}}({{\alpha }}))\) for any \({{\alpha }}'\in P_{{\alpha }}\).
Proof
By Lemma 5, \({\text {DF}}_{\mathrm{MZ}}(C_{{\alpha }})\) is equal either to \(\{{{\alpha }}\}\) (in the regular case), or to \(P_{{\alpha }}\). In either case, every element \({{\alpha }}'\) of \({\text {DF}}_{\mathrm{MZ}}(C_{{\alpha }})\) has \({\mathscr {I}}({{\alpha }}')={\mathscr {I}}({{\alpha }})\).
Therefore if C is any minimal subset of \(B({\mathscr {I}}({{\alpha }}))\) for which \({\text {DF}}_{\mathrm{MZ}}(C)\) intersects \({\text {DF}}_{\mathrm{MZ}}(C_{{\alpha }})\), then there is some \({{\alpha }}'\in {\text {DF}}_{\mathrm{MZ}}(C)\) with \({\mathscr {I}}({{\alpha }}')={\mathscr {I}}({{\alpha }})\). By Lemma 6, it follows that \(\max C \ge {\mathscr {I}}({{\alpha }})\).
On the other hand, \(\max C \le {\mathscr {I}}({{\alpha }})\), since \(C\subset B({\mathscr {I}}({{\alpha }}))\). Therefore \(\max C = {\mathscr {I}}({{\alpha }})\), i.e. \({\mathscr {I}}({{\alpha }})\in C\). By minimality, it follows that \(C = C_{{\alpha }}\) as required.
The statements (a) and (b) are immediate consequences, using the facts that \({\text {DF}}_{\mathrm{MZ}}(C_{{\alpha }})\) is either \(\{{{\alpha }}\}\) or \(P_{{\alpha }}\); and that \(C_{{\alpha }}\) is not an \({{\alpha }}\)-set in the exceptional case. \(\square \)
By Theorem 6, and in view of Example 1, we cannot expect every irrational \({{\alpha }}\), or any element of an exceptional interval \(P_{{\alpha }}\), to be represented by a rotational set in \(B({\mathscr {I}}({{\alpha }}))\). The next theorem says that all other \({\mathbf {v}}\) can be represented by a \({\mathbf {v}}\)-rotational set. Write \(Q_{{\alpha }}= \emptyset \) if \({{\alpha }}\) is rational regular; \(Q_{{\alpha }}=\{{{\alpha }}\}\) if \({{\alpha }}\) is irrational regular; and \(Q_{{\alpha }}= P_{{\alpha }}\) if \({{\alpha }}\) is irrational exceptional.
Theorem 7
Let \({{\alpha }}\in \varDelta '\). Then every \({\mathbf {v}}\in {\text {DF}}({\mathscr {I}}({{\alpha }})) - Q_{{{\alpha }}}\) is represented by a \({\mathbf {v}}\)-rotational set in \(B({\mathscr {I}}({{\alpha }}))\).
Proof
If \({\mathbf {v}}\in {\text {DF}}({\mathscr {I}}({{\alpha }}))\) is rational, then \(C_{\mathbf {v}}= o({\mathscr {I}}({\mathbf {v}}),\sigma )\) is a periodic orbit (and hence a \({\mathbf {v}}\)-rotational set) which is contained in \(B({\mathscr {I}}({{\alpha }}))\) by (14).
For a rational element \({\mathbf u}\) of \(\varDelta '\), let \(W_{\mathbf u}\) be the repeating block of the periodic sequence \({\mathscr {I}}({\mathbf u})\). Lemma 7 of [7] states that if \(({\mathbf u}_i)\) is a sequence of rational elements of \(\varDelta '\) with \({\mathbf u}_i\in {\text {DF}}({\mathscr {I}}({{\alpha }}))\) for each i, then the sequence
is an element of \(B({\mathscr {I}}({{\alpha }}))\).
Therefore if \({\mathbf {v}}\in {\text {Int}}({\text {DF}}({\mathscr {I}}({{\alpha }})))\) then we can choose rational elements \({\mathbf u}_0\), \({\mathbf u}_1\), and \({\mathbf u}_2\) of \({\text {DF}}({\mathscr {I}}({{\alpha }}))\), with the same denominator, which contain \({\mathbf {v}}\) in their convex hull. The concatenation scheme of the blocks \(W_{{\mathbf u}_0}\), \(W_{{\mathbf u}_1}\), and \(W_{{\mathbf u}_2}\) used by Ziemian in the proof of Lemma 4.4 of [32] can then be used to construct a \({\mathbf {v}}\)-rotational set in \(B({\mathscr {I}}({{\alpha }}))\).
It therefore only remains to consider the case where \({\mathbf {v}}\in {\text {Bd}}({\text {DF}}({\mathscr {I}}({{\alpha }}))) - Q_{{\alpha }}\) is irrational. Then either \({\mathbf {v}}\) is contained in an interval I in \({\text {Bd}}({\text {DF}}({\mathscr {I}}({{\alpha }})))\) whose endpoints are rational polyhedral vertices, or \({{\alpha }}\) is irrational regular and \({\mathbf {v}}\) is contained in an interval I in \({\text {Bd}}({\text {DF}}({\mathscr {I}}({{\alpha }})))\) for which one endpoint is a rational polyhedral vertex, and the other endpoint is \({{\alpha }}\). However, in the latter case, where the vertices of \({\text {DF}}({\mathscr {I}}({{\alpha }}))\) limit on \({{\alpha }}\) from one side only, the interval I is contained in an interval with rational endpoints (see Example 36c) of [7]). Therefore, in either case, we can find rational elements \({\mathbf u}_0 = {\mathbf p}_0/q\) and \({\mathbf u}_1 = {\mathbf p}_1/q\) of \({\text {DF}}({\mathscr {I}}({{\alpha }}))\), having the same denominator q, such that
for some irrational \(\lambda \in [0,1]\). These rational vectors \({\mathbf p}_i/q\) need not be in reduced form: let \(k_0\) and \(k_1\) be the positive integers with the property that when \({\mathbf p}_i/q\) is written in reduced form it has denominator \(q/k_i\) (so that the word \(W_{{\mathbf u}_i}^{k_i}\) has length q).
Let \(\underline{s}\in \{0,1\}^{\mathbb {N}}\) be the Sturmian sequence [3] of slope \(\lambda \), and let \(\underline{w}\in B({\mathscr {I}}({{\alpha }}))\) be the element of \(\Sigma ^+\) obtained from \(\underline{s}\) by the substitution \(0\mapsto W_{{\mathbf u}_0}^{k_0}\), \(1\mapsto W_{{\mathbf u}_1}^{k_1}\). Since \(\underline{s}\) is Sturmian, we have \(|a_r-r\lambda |<1\) for all \(r\in {\mathbb {N}}\), where \(a_r\) denotes the number of 1s in the first r symbols of \(\underline{s}\). Therefore, for each \(r\in {\mathbb {N}}\),
If s is any natural number then, writing \(s=qr+t\) with \(0\le t<q\), we have
The existence of a \({\mathbf {v}}\)-rotational set follows by Remark 5(b). (In fact, since \(\underline{w}\) is almost periodic by construction, its orbit closure is equal to its omega-limit set, and hence is itself a \({\mathbf {v}}\)-rotational set.) \(\square \)
8 Dynamical representatives of rotation vectors in the figure eight and torus families
8.1 Representatives in the figure eight family
Because the return map \(R_t:Z_t\rightarrow Z_t\) of the restriction of the figure eight map \(f_t\) to the subset \(Z_t\) of the figure eight space X is topologically conjugate to a symbolic \(\beta \)-shift (Lemma 3d), translating results about the existence of \({\mathbf {v}}\)-sets and directional measures to this context is straightforward. On the other hand, uniqueness and non-existence results need an additional result (Lemma 8 below) to rule out invariant subsets which are not contained in \(Z_t\).
Recall that \({\mathscr {C}}\subset [0,1]\) is the compact set of parameters t for which \(\ell (t)\in Z_t\); and that there is a “kneading sequence” map \(K:{\mathscr {C}}\rightarrow \Sigma _+\), which is an order-preserving homeomorphism onto the set \(\{\underline{w}\in \mathrm {Max}:\underline{w}\ge 2\overline{1}\}\) of sufficiently large maximal sequences. It is a consequence of Theorem 22 of [6] that an infimax sequence \({\mathscr {I}}({{\alpha }})\) lies in this set if and only if \(\alpha _0<\alpha _2\), and we therefore restrict attention to the subset
of \(\varDelta '\). Given \({{\alpha }}\in \varDelta ''\), let
be the unique parameter t for which \(K(t)={\mathscr {I}}({{\alpha }})\).
Recall that the function \(a:[0,1]\rightarrow {\mathscr {C}}\) is defined by \(a(t) = \max \{t'\in {\mathscr {C}}:t'\le t\}\). We now define \(b:[0,1]\rightarrow {\mathscr {C}}\) by
The maximum exists since the set of infimax sequences which are less than or equal to K(t) has a maximum (as in (13)) and K is an order-preserving homeomorphism. It is immediate from the definitions that \(b(a(t))=a(b(t))= b(t)\) for all t.
Lemma 7
Let \(t\in [0,1]\). Then \(\rho _8(t) = \rho _8(b(t)) = \varPi ({\text {DF}}(K(b(t))))\).
Proof
Let \({\mathscr {I}}({{\alpha }})\) be the greatest infimax sequence which is not greater than K(a(t)). Then we have \({\mathscr {I}}({{\alpha }}) = K(b(a(t)))=K(b(t))\) by definition of the function b and the injective monotonicity of K.
It follows that
as required. Here the first, second, and last equalities are given by Theorem 3; the third is by (13); and the fourth is by the first paragraph of the proof. \(\square \)
Remark 8
Lemma 7 shows that the bifurcation set \({\mathscr {B}}\) of parameters at which \(\rho _8\) is not locally constant (see Theorem 3) is given by \({\mathscr {B}}= K^{-1}({\mathscr {J}})\).
For each \({{\alpha }}\in \varDelta ''\), define \(D_{{\alpha }}\subset X\) by
Since the return map \(R_{t({{\alpha }})}:Z_{t({{\alpha }})}\rightarrow Z_{t({{\alpha }})}\) and \(\sigma :B({\mathscr {I}}({{\alpha }}))\rightarrow B({\mathscr {I}}({{\alpha }}))\) are conjugate by Lemma 3(d) and the definition of \(t({{\alpha }})\), \(D_{{\alpha }}\) is conjugate to a two step tower over the \(\sigma \)-minimal set \(C_{{\alpha }}\), and is therefore a minimal set for \(f_{t({{\alpha }})}\).
Lemma 8
Let \({{\alpha }}\in \varDelta '',\) and D be a minimal set for \(f_{t({{\alpha }})}\) with the property that \(\varPi ({{\alpha }})\in {\text {rot}}_{\mathrm{MZ}}(D, f_{t({{\alpha }})}, \varGamma )\). Then \(D=D_{{\alpha }}.\)
Proof
Recall from Sect. 5.3 that \(X_t\subset X\) is defined for each \(t\in [0,1]\) by
Suppose that \(t<t({{\alpha }})\). Then \(b(t)<t({{\alpha }})\), so that \(K(b(t))<{\mathscr {I}}({{\alpha }})\), and hence \(\varPi ({\text {DF}}(K(b(t))))\) does not contain \(\varPi ({{\alpha }})\) by (12). It follows that D cannot be contained in \(X_t\), since this would yield the contradiction
using Lemma 7 and that \(f_{t({{\alpha }})}=f_t=f\) on \(X_t\).
It follows then by the compactness of D that it contains a point \(x\in [\ell (t({{\alpha }})), r(t({{\alpha }}))]\). Since \(f_{t({{\alpha }})}(x) = f_{t({{\alpha }})}(\ell (t({{\alpha }}))) \in D\cap D_{{\alpha }}\), the minimal sets D and \(D_{{\alpha }}\) are equal as required. \(\square \)
Since all of the rotation sets \(\rho _8(t)\) are of the form \(\varPi ({\text {DF}}({\mathscr {I}}({{\alpha }})))\) for some \({{\alpha }}\in \varDelta ''\), and \(\varPi \) is projective, they can be classified as either rational regular (i.e. polygonal), irrational regular (i.e. having a single irrational extreme point \({\mathbf u}_t=\varPi ({{\alpha }})\)), or irrational exceptional (i.e. having two irrational extreme points which are the endpoints of an exceptional interval \(P_t = \varPi (P_{{\alpha }})\) in the boundary of \(\rho _8(t)\)).
Theorem 8
Let \(t\in [0,1]\).
-
(a)
If \(\rho _8(t)\) is rational regular, then every \({\mathbf {v}}\in \rho _8(t)\) is represented by a \({\mathbf {v}}\)-rotational set for \(f_t\). Thus, \(\rho _{em}(t) = \rho _8(t)\).
-
(b)
If \(\rho _8(t)\) is irrational regular then :
-
(i)
Every \({\mathbf {v}}\in \rho _8(t)\) is represented by a \({\mathbf {v}}\)-minimal set for \(f_t\). In particular, \(\rho _{em}(t)=\rho _8(t)\).
-
(ii)
Every \({\mathbf {v}}\in \rho _8(t) - \{{\mathbf u}_t\}\) is represented by a \({\mathbf {v}}\)-rotational set for \(f_t\).
There exist irrational regular \(\rho _8(t)\) for which \(f_t\) has no \({\mathbf u}_t\)-rotational set.
-
(i)
-
(c)
If \(\rho _8(t)\) is irrational exceptional then :
-
(i)
Every \({\mathbf {v}}\in \rho _8(t) - P_t\) is represented by a \({\mathbf {v}}\)-rotational set for \(f_t\).
-
(ii)
There is a unique \(f_t\)-minimal set D such that \({\text {rot}}_{\mathrm{MZ}}(D,f_t,\varGamma )\) intersects \(P_t,\) namely \(D=D_{{\alpha }}\) where \(t=t({{\alpha }})\). In particular, if \({\mathbf {v}}\in P_t\) then there is no \({\mathbf {v}}\)-minimal set for \(f_t\).
-
(iii)
Any ergodic invariant measure for \(f_t\) representing any vector \({\mathbf {v}}\in P_t\) is lost. In particular, the two ergodic invariant measures on \(D_{{\alpha }},\) which represent the endpoints of \(P_t,\) are lost.
-
(i)
Proof
Let \({{\alpha }}\in \varDelta ''\), and write \(t:=t({{\alpha }})\), so that \(K(t) = {\mathscr {I}}({{\alpha }})\), and \(\rho _8(t) = \varPi ({\text {DF}}({\mathscr {I}}({{\alpha }})))\) by Lemma 7.
Lemma 3(d) states that \(h_t:Z_t\rightarrow B({\mathscr {I}}({{\alpha }}))\) conjugates the return map \(R_t:Z_t\rightarrow Z_t\) and the symbolic \(\beta \)-shift \(\sigma :B({\mathscr {I}}({{\alpha }}))\rightarrow B({\mathscr {I}}({{\alpha }}))\). There is therefore a bijection \(M_t\) from the set of minimal sets of \(\sigma :B({\mathscr {I}}({{\alpha }}))\rightarrow B({\mathscr {I}}({{\alpha }}))\) to the set of minimal sets of \(f_t:Y_t\rightarrow Y_t\), which sends the minimal set containing \(\underline{w}\) to the minimal set containing \(h_t^{-1}(\underline{w})\). Moreover, C is a \({\mathbf {v}}\)-minimal set (respectively \({\mathbf {v}}\)-rotational set) for \(\sigma \) if and only if \(M_t(C)\) is a \(\varPi ({\mathbf {v}})\)-minimal set (respectively \(\varPi ({\mathbf {v}})\)-rotational set) for \(f_t\).
If \(t\in [0,1]\) is not of the form \(t({{\alpha }})\) for any \({{\alpha }}\in \varDelta ''\), then \(\rho _8(t)=\rho _8(b(t))\) is rational regular. Since \(b(t)<t\), we have that \(f_t = f_{b(t)}\) on \(Y_{b(t)}\), and hence any \(f_{b(t)}\)-minimal set in \(Y_{b(t)}\) is also an \(f_t\)-minimal set.
Parts (a), (b)(ii), and (c)(i) therefore follow from Theorem 7, and part (b)(i) follows from Theorem 6(a).
For the final statement of part (b), pick \({{\alpha }}\) to be the normalized Perron–Frobenius eigenvalue of \(A_1\) as in Example 1. This \({{\alpha }}\) does not lie in \(\varDelta ''\), but \({{\beta }}= (\alpha _1, \alpha _0, \alpha _1+\alpha _2)/(1+\alpha _1) \in \varDelta ''\) has analogous properties (in the language of [6], \({{\beta }}\) has itinerary \(0\overline{1}\)). In particular, \({{\beta }}\) is totally irrational regular, and \({\mathscr {I}}({{\beta }})\) is obtained by applying \(\varLambda _0\) to the fixed point of the substitution \(\varLambda _1\); and, by the same argument as in Example 1, \(C_{{\beta }}\) is not a \({{\beta }}\)-rotational set. Therefore \(D_{{\beta }}= M_{t({{\beta }})}(C_{{\beta }})\) is not a \({\mathbf u}_{t({{\beta }})}\)-rotational set for \(f_{t({{\beta }})}\). Since \(D_{{\beta }}\) is the unique \({\mathbf u}_{t({{\beta }})}\)-minimal set for \(f_{t({{\beta }})}\) by Lemma 8, the result follows.
Parts (c)(ii) and (c)(iii) follow from Lemma 8, Theorem 6(b), and Lemma 5(b). \(\square \)
8.2 Representatives in the torus family
Recall from Theorem 4 and the construction of Sect. 6.2 that the homeomorphism \(\varPhi _t:{\mathbb {T}}^2\rightarrow {\mathbb {T}}^2\) has non-wandering set contained in \(\varLambda _t \cup \overline{S}\); that \(\overline{S}\) consists of fixed points of \(\varPhi _t\); and that \(\varPhi _t|_{\varLambda _t}\) is topologically conjugate to the natural extension \(\hat{f}_t:\varprojlim (X,f_t)\rightarrow \varprojlim (X,f_t)\) of the figure eight map \(f_t\).
In order to extend the results of Theorem 8 to the torus family, it is therefore only necessary to understand the relationship between minimal sets and ergodic invariant measures of a map and its natural extension. Given a continuous map \(g:Z\rightarrow Z\) of a compact metric space, we write \({\hat{g}}:\varprojlim (Z,g)\rightarrow \varprojlim (Z,g)\) for its natural extension, and \(\pi _0:\varprojlim (Z,g)\rightarrow Z\) for the projection \((z_0,z_1,\ldots )\mapsto z_0\). We also denote by \({\text {MS}}(g)\) the collection of g-invariant minimal subsets of Z.
The following result is folklore: see page 28 of [12], Theorem 3.2 of [8, 19, 28].
Lemma 9
Let \(g:Z\rightarrow Z\) be a continuous map of a compact metric space. Then the maps \(C \mapsto \pi _0(C)\) and \(\mu \mapsto (\pi _0)_*(\mu )\) are bijections \({\text {MS}}({\hat{g}})\rightarrow {\text {MS}}(g)\) and \({\mathscr {M}}_e({\hat{g}})\rightarrow {\mathscr {M}}_e(g)\) respectively.
We then immediately have:
Theorem 9
All of the statements of Theorem 8 hold when \(f_t\) is replaced by \(\varPhi _t\) and \(\rho _8(t)\) is replaced by \(\rho (t)\).
Remark 9
-
(a)
Theorem 9 was proved directly as a translation of Theorems 6 and 7 about rotation sets of symbolic \(\beta \)-shifts. Much is already known, however, about representatives for rotation vectors in the interior of the rotation set of a torus homeomorphism \(\varPhi :{\mathbb {T}}^2\rightarrow {\mathbb {T}}^2\) isotopic to the identity. Misiurewicz and Ziemian show that every \({\mathbf {v}}\in {\text {Int}}(\rho _{\mathrm{MZ}}(\varPhi ))\) is represented by a \({\mathbf {v}}\)-rotational set (proof of Theorem A(a) of [26]). When \({\mathbf {v}}\) is rational, these \({\mathbf {v}}\)-rotational sets can be chosen to be periodic orbits, by a theorem of Franks [10]; and to have the topological type of a periodic orbit of a rigid rotation of the torus by the vector \({\mathbf {v}}\), using a result of Parwani [29].
-
(b)
The significance of the existence of \({\mathbf {v}}\)-rotational sets is illustrated by Jäger’s result [15], that if \({\mathbf {v}}\) is irrational and \(\varPhi \) has a \({\mathbf {v}}\)-rotational set Z, then there is a semi-conjugacy, homotopic to the inclusion, onto a minimal set of rigid rotation by \({\mathbf {v}}\). Therefore if \({\mathbf {v}}\) is totally irrational then \(\varPhi :Z\rightarrow Z\) is semi-conjugate to a minimal rigid rotation of \({\mathbb {T}}^2\), while if \({\mathbf {v}}\) is partially irrational then \(\varPhi :Z\rightarrow Z\) is semi-conjugate to a minimal rigid rotation of a circle.
-
(c)
The relationship between Theorem 9 and recent results of Zanata [2] and Le Calvez and Tal [22] is also important to note. If \(\varPhi :{\mathbb {T}}^2\rightarrow {\mathbb {T}}^2\) is a homeomorphism and \(\mu \in {\mathscr {M}}_e(\varPhi )\) represents an extreme point \({\mathbf {v}}\) of \(\rho _{\mathrm{MZ}}(\varPhi )\), then
-
(i)
if \(\rho _{\mathrm{MZ}}(\varPhi )\) has multiple supporting lines at \({\mathbf {v}}\), then \(\mu \) is directional and its support has bounded deviation; and
-
(ii)
if \(\rho _{\mathrm{MZ}}(\varPhi )\) has a unique supporting line at \({\mathbf {v}}\) which does not intersect \(\rho _{\mathrm{MZ}}(\varPhi )\) in a non-trivial segment, then \(\mu \) is directional.
These statements were proved by Zanata in the case where \(\varPhi \) is a \(C^{1+\epsilon }\) diffeomorphism, and were subsequently improved to \(C^0\) by Le Calvez and Tal. The examples which we have presented show that these results are in some sense sharp. Specifically, in Theorem 9(b), the examples with unbounded deviation, based on Example 1, have a unique supporting line; and in Theorem 9(c)(iii), where there are lost measures, at least in the cases we have been able to analyze, the unique supporting line intersects the rotation set in a non-trivial segment.
-
(i)
9 Questions raised by the family
The following properties hold for the rotation sets \(\rho (t)\) of the family \(\{\varPhi _t\}\) constructed here. Are they true in general? If not, are there natural conditions under which they hold?
-
(a)
A point on the boundary of \(\rho (t)\) is a polygonal vertex if and only if it is a rational extreme point, and is a limit extreme point if and only if it is an irrational extreme point.
-
(b)
\(\rho (t)\) has only finitely many irrational extreme points.
-
(c)
For every point \({\mathbf {v}}\in \rho (t)\), including points on the boundary, there is a point \(z\in {\mathbb {T}}^2\) with \(\widehat{\delta ^t}(z) = {\mathbf {v}}\), so that \(\rho _p(\varPhi _t) = \rho _{\mathrm{MZ}}(\varPhi _t)\).
-
(d)
At least generically, totally irrational extreme points are smooth.
-
(e)
If \(\rho (t_1) \not = \rho (t_2)\), then the function \(t\mapsto {\text {Ex}}(\rho (t))\) is discontinuous at some \(t\in (t_1,t_2)\) (the Tal–Zanata property).
At least one of the properties of the family \(\{\varPhi _t\}\) does not hold in general, namely that every \({\mathbf {v}}\) belonging to an interval with rational endpoints contained in \(\rho (t)\) is represented by a \({\mathbf {v}}\)-rotational set. This property does not hold in an example of Misiurewicz and Ziemian [26, Section 3].
The proof of Theorem 4, which was used to unwrap the family of maps on the figure eight space, is essentially \(C^0\). Do the phenomena observed here hold with more smoothness? What can one say about generic rotation sets, and the rotation sets in generic one-parameter families, in the \(C^r\) category?
References
Adamczewski, B.: Symbolic discrepancy and self-similar dynamics. Ann. Inst. Fourier (Grenoble) 54(7), 2201–2234 (2004)
Addas-Zanata, S.: Uniform bounds for diffeomorphisms of the torus and a conjecture of Boyland. J. London Math. Soc. 92(2), 537–553 (2015). arXiv:1403.7533v3
Arnoux, P.: Sturmian sequences. In: Substitutions in Dynamics, Arithmetics and Combinatorics. Lecture Notes in Mathematics, vol. 1794, pp. 143–198. Springer, Berlin (2002)
Barge, M., Martin, J.: The construction of global attractors. Proc. Am. Math. Soc. 110(2), 523–525 (1990)
Boyland, P., de Carvalho, A., Hall, T.: Inverse limits as attractors in parameterized families. Bull. Lond. Math. Soc. 45(5), 1075–1085 (2013)
Boyland, P., de Carvalho, A., Hall, T.: Symbol ratio minimax sequences in the lexicographic order. Ergod. Theory Dyn. Syst. FirstView, 1–26 (2015)
Boyland, P., de Carvalho, A., Hall, T.: On digit frequencies in \(\beta \)-expansions. Trans. Am. Math. Soc. (to appear)
Brown, J.: Inverse limits, entropy and weak isomorphism for discrete dynamical systems. Trans. Am. Math. Soc. 164, 55–66 (1972)
Bruin, H., Troubetzkoy, S.: The Gauss map on a class of interval translation mappings. Isr. J. Math. 137, 125–148 (2003)
Franks, J.: Realizing rotation vectors for torus homeomorphisms. Trans. Am. Math. Soc. 311(1), 107–115 (1989)
Fried, D.: The geometry of cross sections to flows. Topology 21(4), 353–371 (1982)
Furstenberg, H.: Disjointness in ergodic theory, minimal sets, and a problem in Diophantine approximation. Math. Syst. Theory 1, 1–49 (1967)
Geller, W., Misiurewicz, M.: Rotation and entropy. Trans. Am. Math. Soc. 351(7), 2927–2948 (1999)
Jäger, T.: The concept of bounded mean motion for toral homeomorphisms. Dyn. Syst. 24(3), 277–297 (2009)
Jäger, T.: Linearization of conservative toral homeomorphisms. Invent. Math. 176(3), 601–616 (2009)
Jenkinson, O.: Directional entropy of rotation sets. C. R. Acad. Sci. Paris Sér. I Math. 332(10), 921–926 (2001)
Jenkinson, O.: Rotation, entropy, and equilibrium states. Trans. Am. Math. Soc. 353(9), 3713–3739 (2001) (electronic)
Katok, A., Hasselblatt, B.: Introduction to the modern theory of dynamical systems. In: Encyclopedia of Mathematics and its Applications, vol. 54. Cambridge University Press, Cambridge (1995) (with a supplementary chapter by Katok and Leonardo Mendoza)
Kennedy, J., Raines, B., Stockman, D.: Basins of measures on inverse limit spaces for the induced homeomorphism. Ergod. Theory Dyn. Syst. 30(4), 1119–1130 (2010)
Kwapisz, J.: Every convex polygon with rational vertices is a rotation set. Ergod. Theory Dyn. Syst. 12(2), 333–339 (1992)
Kwapisz, J.: A toral diffeomorphism with a nonpolygonal rotation set. Nonlinearity 8(4), 461–476 (1995)
Le Calvez, P., Tal F.: Forcing theory for transverse trajectories of surface homeomorphisms (2015). arXiv:1503.09127
Mather, J.: Action minimizing invariant measures for positive definite Lagrangian systems. Math. Z. 207(2), 169–207 (1991)
Misiurewicz, M.: Rotation Theory. Scholarpedia 2(10) (2007)
Misiurewicz, M., Ziemian, K.: Rotation sets for maps of tori. J. Lond. Math. Soc. (2) 40(3), 490–506 (1989)
Misiurewicz, M., Ziemian, K.: Rotation sets and ergodic measures for torus homeomorphisms. Fund. Math. 137(1), 45–52 (1991)
Oxtoby, J.: Ergodic sets. Bull. Am. Math. Soc. 58, 116–136 (1952)
Parthasarathy, K.: Probability Measures on Metric Spaces. AMS Chelsea Publishing, Providence (2005) (reprint of the 1967 original)
Parwani, K.: Monotone periodic orbits for torus homeomorphisms. Proc. Am. Math. Soc. 133(6), 1677–1683 (2005) (electronic)
Passeggi, A.: Rational polygons as rotation sets of generic homeomorphisms of the two torus. J. Lond. Math. Soc. (2) 89(1), 235–254 (2014)
Schwartzman, S.: Asymptotic cycles. Ann. Math. 2(66), 270–284 (1957)
Ziemian, K.: Rotation sets for subshifts of finite type. Fund. Math. 146(2), 189–201 (1995)
Acknowledgments
We would like to thank Fábio Armando Tal and Salvador Addas-Zanata for numerous fruitful conversations. The authors are grateful for the support of FAPESP Grants 2010/09667-0 and 2011/17581-0. This research has also been supported in part by EU Marie-Curie IRSES Brazilian-European partnership in Dynamical Systems (FP7-PEOPLE-2012-IRSES 318999 BREUDS).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Boyland, P., de Carvalho, A. & Hall, T. New rotation sets in a family of torus homeomorphisms. Invent. math. 204, 895–937 (2016). https://doi.org/10.1007/s00222-015-0628-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00222-015-0628-2